
 Technologie-Peripheriegeräte
KI
Ein geschmeidigerer Regelalgorithmus als PID und Carnegie Mellon University
Technologie-Peripheriegeräte
KI
Ein geschmeidigerer Regelalgorithmus als PID und Carnegie Mellon University
Ein geschmeidigerer Regelalgorithmus als PID und Carnegie Mellon University


MPC-Steuerungsalgorithmus, der vollständige Name lautet Model Predictive Control (Model Predictive Control), ist eine Steuerungstechnologie, die auf dem dynamischen Systemmodell basiert. Es funktioniert, indem es das zukünftige Verhalten des Systems durch mathematische Modelle vorhersagt und die Steuereingaben des Systems auf der Grundlage dieser Vorhersagen optimiert, um die gewünschte Ausgabe zu erzielen. Die Kernidee des MPC-Steuerungsalgorithmus besteht darin, die beste Steuerungseingabe zu erhalten, indem die Vorhersageergebnisse für einen bestimmten Zeitraum in der Zukunft in jedem Steuerungszyklus optimiert werden. Diese Optimierung basiert auf einigen Vorhersageergebnissen, um die Steuereingabe des Systems zu optimieren, um die gewünschte Ausgabe zu erzielen. Der MPC-Steuerungsalgorithmus ist weit verbreitet und eignet sich besonders für Steuerungssysteme, die bestimmte Einschränkungen erfüllen müssen. Durch die Kombination von Systemmodellen und Optimierungstechniken kann MPC in verschiedenen Branchen eingesetzt werden. Der Kern des MPC-Steuerungsalgorithmus liegt in seinem Vorhersagemodell, das den zukünftigen Systemzustand basierend auf den aktuellen Zustandsinformationen des Systems vorhersagen kann. Die Form des Vorhersagemodells ist nicht festgelegt und kann eine Zustandsraumgleichung, eine Übertragungsfunktion, ein Sprungantwortmodell, ein Impulsantwortmodell, ein Fuzzy-Modell usw. sein. Die spezifische Form hängt vom gesteuerten Objekt und dem Zustand ab, der vorhergesagt werden muss.
TinyMPC ist ein Open-Source-Löser, der auf die prädiktive Steuerung konvexer Modelle zugeschnitten ist und Hochgeschwindigkeitsberechnungen ermöglicht. TinyMPC ist in C++ mit minimalen Abhängigkeiten implementiert und eignet sich besonders für eingebettete Steuerungs- und Robotikanwendungen auf Plattformen mit eingeschränkten Ressourcen. TinyMPC kann Zustands- und Eingabegrenzen sowie Einschränkungen zweiter Ordnung verarbeiten. Zur Unterstützung der Codegenerierung für eingebettete Systeme stehen Python-, Julia- und MATLAB-Schnittstellen zur Verfügung.
Bot-DemoTinyMPC bietet Unterstützung für datenschutzerweiterte Computeranwendungen und kann verwendet werden, um die Lücke zwischen sicherer Mehrparteienberechnung und ressourcenbeschränkten Verarbeitungsplattformen zu schließen. Durch die Integration von TinyMPC in Roboter mit unzureichender Rechenleistung können diese Vorgänge schnell ausführen und die Vorteile einer sicheren Ausführung nutzen.
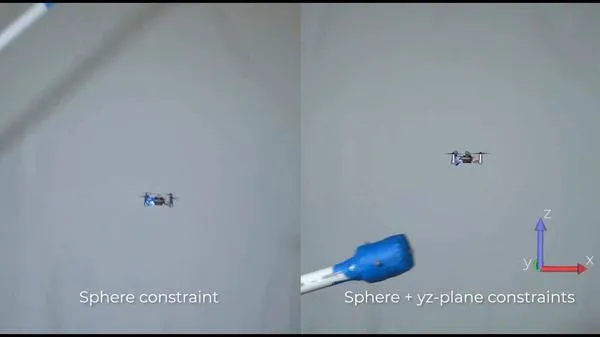
Dynamische HindernisvermeidungTinyMPC läuft schnell genug, um Einschränkungen bei jedem Zeitschritt neu zu linearisieren, sodass es Überlegungen zu sich bewegenden Hindernissen anstellen kann. Auf der linken Seite wird eine virtuelle Kugel, die am Ende des Joysticks zentriert ist, bei jedem Zeitschritt in einen neuen Satz von Hyperebenenbeschränkungen linearisiert. Der Algorithmus kann auch eine beliebige Anzahl beliebiger linearer Einschränkungen verarbeiten. Auf der rechten Seite wird beispielsweise vermieden, dass das Ende des Stocks am Ende des Stocks liegt, während es in der yz-Ebene bleibt.
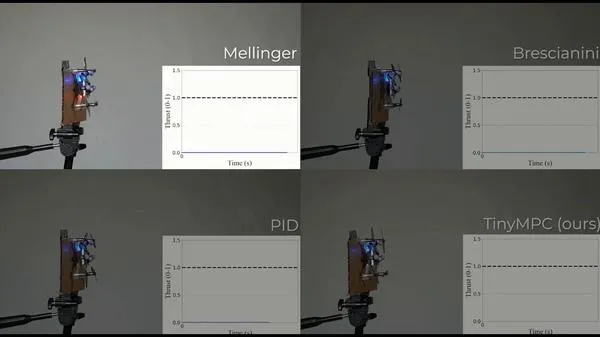
TinyMPC kann die Wiederherstellung unter extremen Bedingungen einleiten. In diesem Beispiel wird er mit dem Original-Controller von Crazyflie 2.1 verglichen. Nur TinyMPC kann Kontrollgrenzen durchbrechen und saubere Wiederherstellungsvorgänge erzielen.
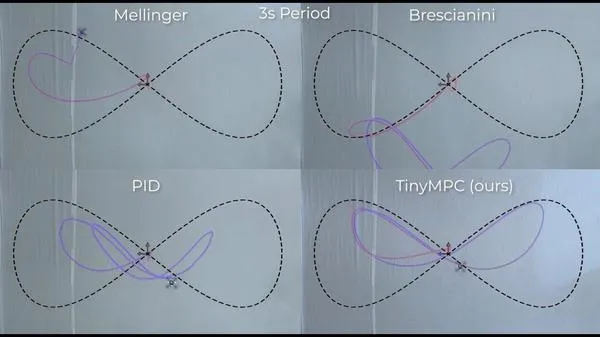
Wir haben den gleichen Standardcontroller für die undurchführbare schnelle Abbildung-8-Verfolgungsaufgabe verwendet (eine einzelne Abbildung-8-Zeit konnte nur erreicht werden, wenn die Drohne leistungsstärker war). TinyMPC und PID können aufrecht bleiben, aber die Flugbahn von TinyMPC ähnelt eher einer Acht.
Bei Mikrocontroller-Benchmarks übertrifft TinyMPC modernste Solver in Bezug auf Geschwindigkeit und Speicherbedarf. Wir lösen zufällig generierte QP-basierte MPC-Probleme und vergleichen die Iterationszeit und den Speicherbedarf mit OSQP. Die maximale Geschwindigkeitssteigerung von TinyMPC auf OSQP beträgt das Achtfache der von OSQP bei deutlich weniger Speicher.
 TinyMPC ist jetzt auch in der Lage, konische Einschränkungen zu verarbeiten! In (b) vergleichen wir TinyMPC mit zwei vorhandenen Kegellösern (SCS und ECOS) mit integrierter Unterstützung für das Problem der sanften Landung von Raketen. TinyMPC erreicht eine durchschnittliche Geschwindigkeitssteigerung von 13x auf SCS und 137x auf ECOS.
TinyMPC ist jetzt auch in der Lage, konische Einschränkungen zu verarbeiten! In (b) vergleichen wir TinyMPC mit zwei vorhandenen Kegellösern (SCS und ECOS) mit integrierter Unterstützung für das Problem der sanften Landung von Raketen. TinyMPC erreicht eine durchschnittliche Geschwindigkeitssteigerung von 13x auf SCS und 137x auf ECOS.
 Die Echtzeitsteuerung erfordert, dass der Löser innerhalb eines strengen Zeitfensters eine Lösung zurückgibt. Die Flugbahnverfolgungsleistung von TinyMPC wurde mit der von SCS und ECOS beim Problem der sanften Landung von Raketen verglichen, wobei die für jede Lösung verfügbare Zeit künstlich variiert wurde. TinyMPC weist über alle Kontrolldauern hinweg weniger Einschränkungsverletzungen und geringere Tracking-Fehler auf als SCS und ECOS.
Die Echtzeitsteuerung erfordert, dass der Löser innerhalb eines strengen Zeitfensters eine Lösung zurückgibt. Die Flugbahnverfolgungsleistung von TinyMPC wurde mit der von SCS und ECOS beim Problem der sanften Landung von Raketen verglichen, wobei die für jede Lösung verfügbare Zeit künstlich variiert wurde. TinyMPC weist über alle Kontrolldauern hinweg weniger Einschränkungsverletzungen und geringere Tracking-Fehler auf als SCS und ECOS.
 Algorithmus-Mitwirkender:
Algorithmus-Mitwirkender:
Code-Erfassungsadresse:
GitHub - TinyMPC/TinyMPC: Modellprädiktive Steuerung für Mikrocontroller
Das obige ist der detaillierte Inhalt vonEin geschmeidigerer Regelalgorithmus als PID und Carnegie Mellon University. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1667
1667
 14
1426
52
1328
25
1273
29
1255
24
14
1426
52
1328
25
1273
29
1255
24

 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Das neueste Video von Teslas Roboter Optimus ist veröffentlicht und er kann bereits in der Fabrik arbeiten. Bei normaler Geschwindigkeit sortiert es Batterien (Teslas 4680-Batterien) so: Der Beamte hat auch veröffentlicht, wie es bei 20-facher Geschwindigkeit aussieht – auf einer kleinen „Workstation“, pflücken und pflücken und pflücken: Dieses Mal wird es freigegeben. Eines der Highlights Der Vorteil des Videos besteht darin, dass Optimus diese Arbeit in der Fabrik völlig autonom und ohne menschliches Eingreifen während des gesamten Prozesses erledigt. Und aus Sicht von Optimus kann es auch die krumme Batterie aufnehmen und platzieren, wobei der Schwerpunkt auf der automatischen Fehlerkorrektur liegt: In Bezug auf die Hand von Optimus gab der NVIDIA-Wissenschaftler Jim Fan eine hohe Bewertung ab: Die Hand von Optimus ist der fünffingrige Roboter der Welt am geschicktesten. Seine Hände sind nicht nur taktil
 FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
Die Zielerkennung ist ein relativ ausgereiftes Problem in autonomen Fahrsystemen, wobei die Fußgängererkennung einer der ersten Algorithmen ist, die eingesetzt werden. In den meisten Arbeiten wurde eine sehr umfassende Recherche durchgeführt. Die Entfernungswahrnehmung mithilfe von Fischaugenkameras für die Rundumsicht ist jedoch relativ wenig untersucht. Aufgrund der großen radialen Verzerrung ist es schwierig, die standardmäßige Bounding-Box-Darstellung in Fischaugenkameras zu implementieren. Um die obige Beschreibung zu vereinfachen, untersuchen wir erweiterte Begrenzungsrahmen-, Ellipsen- und allgemeine Polygondesigns in Polar-/Winkeldarstellungen und definieren eine mIOU-Metrik für die Instanzsegmentierung, um diese Darstellungen zu analysieren. Das vorgeschlagene Modell „fisheyeDetNet“ mit polygonaler Form übertrifft andere Modelle und erreicht gleichzeitig 49,5 % mAP auf dem Valeo-Fisheye-Kameradatensatz für autonomes Fahren
 Das Neueste von der Universität Oxford! Mickey: 2D-Bildabgleich in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Das Neueste von der Universität Oxford! Mickey: 2D-Bildabgleich in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Projektlink vorne geschrieben: https://nianticlabs.github.io/mickey/ Anhand zweier Bilder kann die Kameraposition zwischen ihnen geschätzt werden, indem die Korrespondenz zwischen den Bildern hergestellt wird. Normalerweise handelt es sich bei diesen Entsprechungen um 2D-zu-2D-Entsprechungen, und unsere geschätzten Posen sind maßstabsunabhängig. Einige Anwendungen, wie z. B. Instant Augmented Reality jederzeit und überall, erfordern eine Posenschätzung von Skalenmetriken und sind daher auf externe Tiefenschätzer angewiesen, um die Skalierung wiederherzustellen. In diesem Artikel wird MicKey vorgeschlagen, ein Keypoint-Matching-Prozess, mit dem metrische Korrespondenzen im 3D-Kameraraum vorhergesagt werden können. Durch das Erlernen des 3D-Koordinatenabgleichs zwischen Bildern können wir auf metrische Relativwerte schließen
 Implementierung von Algorithmen für maschinelles Lernen in C++: Häufige Herausforderungen und Lösungen
Jun 03, 2024 pm 01:25 PM
Implementierung von Algorithmen für maschinelles Lernen in C++: Häufige Herausforderungen und Lösungen
Jun 03, 2024 pm 01:25 PM
Zu den häufigsten Herausforderungen, mit denen Algorithmen für maschinelles Lernen in C++ konfrontiert sind, gehören Speicherverwaltung, Multithreading, Leistungsoptimierung und Wartbarkeit. Zu den Lösungen gehören die Verwendung intelligenter Zeiger, moderner Threading-Bibliotheken, SIMD-Anweisungen und Bibliotheken von Drittanbietern sowie die Einhaltung von Codierungsstilrichtlinien und die Verwendung von Automatisierungstools. Praktische Fälle zeigen, wie man die Eigen-Bibliothek nutzt, um lineare Regressionsalgorithmen zu implementieren, den Speicher effektiv zu verwalten und leistungsstarke Matrixoperationen zu nutzen.
 Mit einer einzelnen Karte läuft Llama 70B schneller als mit zwei Karten, Microsoft hat gerade FP6 in A100 integriert |
Apr 29, 2024 pm 04:55 PM
Mit einer einzelnen Karte läuft Llama 70B schneller als mit zwei Karten, Microsoft hat gerade FP6 in A100 integriert |
Apr 29, 2024 pm 04:55 PM
FP8 und die geringere Gleitkomma-Quantifizierungsgenauigkeit sind nicht länger das „Patent“ von H100! Lao Huang wollte, dass jeder INT8/INT4 nutzt, und das Microsoft DeepSpeed-Team begann, FP6 auf A100 ohne offizielle Unterstützung von NVIDIA auszuführen. Testergebnisse zeigen, dass die FP6-Quantisierung der neuen Methode TC-FPx auf A100 nahe an INT4 liegt oder gelegentlich schneller als diese ist und eine höhere Genauigkeit aufweist als letztere. Darüber hinaus gibt es eine durchgängige Unterstützung großer Modelle, die als Open-Source-Lösung bereitgestellt und in Deep-Learning-Inferenz-Frameworks wie DeepSpeed integriert wurde. Dieses Ergebnis wirkt sich auch unmittelbar auf die Beschleunigung großer Modelle aus – in diesem Rahmen ist der Durchsatz bei Verwendung einer einzelnen Karte zum Ausführen von Llama 2,65-mal höher als der von Doppelkarten. eins
