
 Technologie-Peripheriegeräte
KI
Der Erste auf der Welt! Das Pengcheng Laboratory und das CUHK untersuchen nahezu 400 Dokumente und analysieren die verkörperte Intelligenz eingehend
Technologie-Peripheriegeräte
KI
Der Erste auf der Welt! Das Pengcheng Laboratory und das CUHK untersuchen nahezu 400 Dokumente und analysieren die verkörperte Intelligenz eingehend
Der Erste auf der Welt! Das Pengcheng Laboratory und das CUHK untersuchen nahezu 400 Dokumente und analysieren die verkörperte Intelligenz eingehend


Die AIxiv-Kolumne ist eine Kolumne, in der diese Website akademische und technische Inhalte veröffentlicht. In den letzten Jahren sind in der AIxiv-Kolumne dieser Website mehr als 2.000 Berichte eingegangen, die Spitzenlabore großer Universitäten und Unternehmen auf der ganzen Welt abdecken und so den akademischen Austausch und die Verbreitung wirksam fördern. Wenn Sie hervorragende Arbeiten haben, die Sie teilen möchten, können Sie gerne einen Beitrag leisten oder uns für die Berichterstattung kontaktieren. Einreichungs-E-Mail: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com
Verkörperte Wahrnehmung
- 1. Das vergangene und gegenwärtige Leben der verkörperten Intelligenz
Verkörperte Simulationsplattform – ein digitaler Raum zum effizienten und sicheren Training verkörperter Intelligenz;
– ein digitaler Raum zum effizienten und sicheren Training verkörperter Intelligenz;



5. Verkörperte Interaktion

6. Verkörperter Agent

7 (Sim-to-Real-Anpassung) auf den Prozess der Übertragung von Fähigkeiten oder Verhaltensweisen, die in einer simulierten Umgebung erlernt wurden ( digitaler Raum) in die reale Welt (physische Welt). Der Prozess umfasst die Validierung und Verbesserung der Wirksamkeit von in der Simulation entwickelten Algorithmen, Modellen und Steuerungsstrategien, um sicherzustellen, dass sie in der physischen Umgebung stabil und zuverlässig funktionieren. Um eine Anpassung der Simulation an die Realität zu erreichen, sind verkörperte Weltmodelle, Datenerfassungs- und Trainingsmethoden sowie verkörperte Steuerungsalgorithmen drei Schlüsselelemente. Die folgende Abbildung zeigt fünf verschiedene Sim-to-Real-Paradigmen.
Das obige ist der detaillierte Inhalt vonDer Erste auf der Welt! Das Pengcheng Laboratory und das CUHK untersuchen nahezu 400 Dokumente und analysieren die verkörperte Intelligenz eingehend. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1664
1664
 14
1423
52
1321
25
1269
29
1249
24
14
1423
52
1321
25
1269
29
1249
24

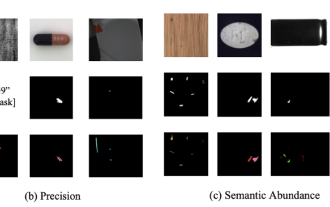 „Defect Spectrum' durchbricht die Grenzen der herkömmlichen Fehlererkennung und erreicht erstmals eine hochpräzise und umfassende semantische Fehlererkennung in der Industrie.
Jul 26, 2024 pm 05:38 PM
„Defect Spectrum' durchbricht die Grenzen der herkömmlichen Fehlererkennung und erreicht erstmals eine hochpräzise und umfassende semantische Fehlererkennung in der Industrie.
Jul 26, 2024 pm 05:38 PM
In der modernen Fertigung ist die genaue Fehlererkennung nicht nur der Schlüssel zur Sicherstellung der Produktqualität, sondern auch der Kern für die Verbesserung der Produktionseffizienz. Allerdings mangelt es vorhandenen Datensätzen zur Fehlererkennung häufig an der Genauigkeit und dem semantischen Reichtum, die für praktische Anwendungen erforderlich sind, was dazu führt, dass Modelle bestimmte Fehlerkategorien oder -orte nicht identifizieren können. Um dieses Problem zu lösen, hat ein Spitzenforschungsteam bestehend aus der Hong Kong University of Science and Technology Guangzhou und Simou Technology innovativ den „DefectSpectrum“-Datensatz entwickelt, der eine detaillierte und semantisch reichhaltige groß angelegte Annotation von Industriedefekten ermöglicht. Wie in Tabelle 1 gezeigt, bietet der Datensatz „DefectSpectrum“ im Vergleich zu anderen Industriedatensätzen die meisten Fehleranmerkungen (5438 Fehlerproben) und die detaillierteste Fehlerklassifizierung (125 Fehlerkategorien).
 Training mit Millionen von Kristalldaten zur Lösung kristallographischer Phasenprobleme, die Deep-Learning-Methode PhAI wird in Science veröffentlicht
Aug 08, 2024 pm 09:22 PM
Training mit Millionen von Kristalldaten zur Lösung kristallographischer Phasenprobleme, die Deep-Learning-Methode PhAI wird in Science veröffentlicht
Aug 08, 2024 pm 09:22 PM
Herausgeber |KX Bis heute sind die durch die Kristallographie ermittelten Strukturdetails und Präzision, von einfachen Metallen bis hin zu großen Membranproteinen, mit keiner anderen Methode zu erreichen. Die größte Herausforderung, das sogenannte Phasenproblem, bleibt jedoch die Gewinnung von Phaseninformationen aus experimentell bestimmten Amplituden. Forscher der Universität Kopenhagen in Dänemark haben eine Deep-Learning-Methode namens PhAI entwickelt, um Kristallphasenprobleme zu lösen. Ein Deep-Learning-Neuronales Netzwerk, das mithilfe von Millionen künstlicher Kristallstrukturen und den entsprechenden synthetischen Beugungsdaten trainiert wird, kann genaue Elektronendichtekarten erstellen. Die Studie zeigt, dass diese Deep-Learning-basierte Ab-initio-Strukturlösungsmethode das Phasenproblem mit einer Auflösung von nur 2 Angström lösen kann, was nur 10 bis 20 % der bei atomarer Auflösung verfügbaren Daten im Vergleich zur herkömmlichen Ab-initio-Berechnung entspricht
 Das NVIDIA-Dialogmodell ChatQA wurde auf Version 2.0 weiterentwickelt, wobei die angegebene Kontextlänge 128 KB beträgt
Jul 26, 2024 am 08:40 AM
Das NVIDIA-Dialogmodell ChatQA wurde auf Version 2.0 weiterentwickelt, wobei die angegebene Kontextlänge 128 KB beträgt
Jul 26, 2024 am 08:40 AM
Die offene LLM-Community ist eine Ära, in der hundert Blumen blühen und konkurrieren. Sie können Llama-3-70B-Instruct, QWen2-72B-Instruct, Nemotron-4-340B-Instruct, Mixtral-8x22BInstruct-v0.1 und viele andere sehen hervorragende Darsteller. Allerdings weisen offene Modelle im Vergleich zu den proprietären Großmodellen GPT-4-Turbo in vielen Bereichen noch erhebliche Lücken auf. Zusätzlich zu allgemeinen Modellen wurden einige offene Modelle entwickelt, die sich auf Schlüsselbereiche spezialisieren, wie etwa DeepSeek-Coder-V2 für Programmierung und Mathematik und InternVL für visuelle Sprachaufgaben.
 Google AI gewann die Silbermedaille der IMO Mathematical Olympiad, das mathematische Argumentationsmodell AlphaProof wurde eingeführt und Reinforcement Learning ist zurück
Jul 26, 2024 pm 02:40 PM
Google AI gewann die Silbermedaille der IMO Mathematical Olympiad, das mathematische Argumentationsmodell AlphaProof wurde eingeführt und Reinforcement Learning ist zurück
Jul 26, 2024 pm 02:40 PM
Für KI ist die Mathematikolympiade kein Problem mehr. Am Donnerstag hat die künstliche Intelligenz von Google DeepMind eine Meisterleistung vollbracht: Sie nutzte KI, um meiner Meinung nach die eigentliche Frage der diesjährigen Internationalen Mathematikolympiade zu lösen, und war nur einen Schritt davon entfernt, die Goldmedaille zu gewinnen. Der IMO-Wettbewerb, der gerade letzte Woche zu Ende ging, hatte sechs Fragen zu Algebra, Kombinatorik, Geometrie und Zahlentheorie. Das von Google vorgeschlagene hybride KI-System beantwortete vier Fragen richtig und erzielte 28 Punkte und erreichte damit die Silbermedaillenstufe. Anfang dieses Monats hatte der UCLA-Professor Terence Tao gerade die KI-Mathematische Olympiade (AIMO Progress Award) mit einem Millionenpreis gefördert. Unerwarteterweise hatte sich das Niveau der KI-Problemlösung vor Juli auf dieses Niveau verbessert. Beantworten Sie die Fragen meiner Meinung nach gleichzeitig. Am schwierigsten ist es meiner Meinung nach, da sie die längste Geschichte, den größten Umfang und die negativsten Fragen haben
 PRO |. Warum verdienen große Modelle, die auf MoE basieren, mehr Aufmerksamkeit?
Aug 07, 2024 pm 07:08 PM
PRO |. Warum verdienen große Modelle, die auf MoE basieren, mehr Aufmerksamkeit?
Aug 07, 2024 pm 07:08 PM
Im Jahr 2023 entwickeln sich fast alle Bereiche der KI in beispielloser Geschwindigkeit weiter. Gleichzeitig verschiebt die KI ständig die technologischen Grenzen wichtiger Bereiche wie der verkörperten Intelligenz und des autonomen Fahrens. Wird der Status von Transformer als Mainstream-Architektur großer KI-Modelle durch den multimodalen Trend erschüttert? Warum ist die Erforschung großer Modelle auf Basis der MoE-Architektur (Mixture of Experts) zu einem neuen Trend in der Branche geworden? Können Large Vision Models (LVM) ein neuer Durchbruch im allgemeinen Sehvermögen sein? ...Aus dem PRO-Mitglieder-Newsletter 2023 dieser Website, der in den letzten sechs Monaten veröffentlicht wurde, haben wir 10 spezielle Interpretationen ausgewählt, die eine detaillierte Analyse der technologischen Trends und industriellen Veränderungen in den oben genannten Bereichen bieten, um Ihnen dabei zu helfen, Ihre Ziele in der Zukunft zu erreichen Jahr vorbereitet sein. Diese Interpretation stammt aus Week50 2023
 Um ein neues wissenschaftliches und komplexes Frage-Antwort-Benchmark- und Bewertungssystem für große Modelle bereitzustellen, haben UNSW, Argonne, die University of Chicago und andere Institutionen gemeinsam das SciQAG-Framework eingeführt
Jul 25, 2024 am 06:42 AM
Um ein neues wissenschaftliches und komplexes Frage-Antwort-Benchmark- und Bewertungssystem für große Modelle bereitzustellen, haben UNSW, Argonne, die University of Chicago und andere Institutionen gemeinsam das SciQAG-Framework eingeführt
Jul 25, 2024 am 06:42 AM
Herausgeber | Der Frage-Antwort-Datensatz (QA) von ScienceAI spielt eine entscheidende Rolle bei der Förderung der Forschung zur Verarbeitung natürlicher Sprache (NLP). Hochwertige QS-Datensätze können nicht nur zur Feinabstimmung von Modellen verwendet werden, sondern auch effektiv die Fähigkeiten großer Sprachmodelle (LLMs) bewerten, insbesondere die Fähigkeit, wissenschaftliche Erkenntnisse zu verstehen und zu begründen. Obwohl es derzeit viele wissenschaftliche QS-Datensätze aus den Bereichen Medizin, Chemie, Biologie und anderen Bereichen gibt, weisen diese Datensätze immer noch einige Mängel auf. Erstens ist das Datenformular relativ einfach, die meisten davon sind Multiple-Choice-Fragen. Sie sind leicht auszuwerten, schränken jedoch den Antwortauswahlbereich des Modells ein und können die Fähigkeit des Modells zur Beantwortung wissenschaftlicher Fragen nicht vollständig testen. Im Gegensatz dazu offene Fragen und Antworten
 Die Genauigkeitsrate erreicht 60,8 %. Das auf Transformer basierende Modell zur Vorhersage der chemischen Retrosynthese wurde in der Unterzeitschrift „Nature' veröffentlicht
Aug 06, 2024 pm 07:34 PM
Die Genauigkeitsrate erreicht 60,8 %. Das auf Transformer basierende Modell zur Vorhersage der chemischen Retrosynthese wurde in der Unterzeitschrift „Nature' veröffentlicht
Aug 06, 2024 pm 07:34 PM
Herausgeber | KX-Retrosynthese ist eine entscheidende Aufgabe in der Arzneimittelforschung und organischen Synthese, und KI wird zunehmend eingesetzt, um den Prozess zu beschleunigen. Bestehende KI-Methoden weisen eine unbefriedigende Leistung und eine begrenzte Vielfalt auf. In der Praxis verursachen chemische Reaktionen häufig lokale molekulare Veränderungen mit erheblichen Überschneidungen zwischen Reaktanten und Produkten. Davon inspiriert schlug das Team von Hou Tingjun an der Zhejiang-Universität vor, die einstufige retrosynthetische Vorhersage als eine Aufgabe zur Bearbeitung molekularer Ketten neu zu definieren und dabei die Zielmolekülkette iterativ zu verfeinern, um Vorläuferverbindungen zu erzeugen. Außerdem wird ein bearbeitungsbasiertes retrosynthetisches Modell EditRetro vorgeschlagen, mit dem qualitativ hochwertige und vielfältige Vorhersagen erzielt werden können. Umfangreiche Experimente zeigen, dass das Modell beim Standard-Benchmark-Datensatz USPTO-50 K eine hervorragende Leistung mit einer Top-1-Genauigkeit von 60,8 % erzielt.
 Gurken schälen und Kleidung an Ort und Stelle falten, der einst beliebte Rasierroboter hat sich wieder weiterentwickelt, Qiongches verkörpertes intelligentes Gehirn ist da!
Jul 11, 2024 pm 12:42 PM
Gurken schälen und Kleidung an Ort und Stelle falten, der einst beliebte Rasierroboter hat sich wieder weiterentwickelt, Qiongches verkörpertes intelligentes Gehirn ist da!
Jul 11, 2024 pm 12:42 PM
Am 4. Juli kündigte das Embodied-Intelligence-Unternehmen Qiongche Intelligent Noematrix (Stand Nr.: H1-A715) auf der World Artificial Intelligence Conference 2024 die Einführung von Qiongche Embodied Brain NoematrixBrain an, um die Implementierung groß angelegter Embodied-Intelligence-Modelle zu beschleunigen. In Kombination mit dem physischen Roboter demonstrierte Qiongche dem Publikum aus nächster Nähe in einer völlig offenen Umgebung „das Falten von Kleidung, die mit nur einem Wurf gefaltet werden kann“ (unendliche Freiheit der Objektmanipulation, Verständnis komplexer Objekte vergleichbar mit Menschen) und „kann sein.“ nach dem Schneiden gefaltet Bahnbrechende Technologien wie das „Ess-Gurken-Schälen“ (unregelmäßige Oberflächenbearbeitung, Präzision sogar über das menschliche Niveau hinaus) sowie praktische Anwendungen wie die Bodenreinigung zu Hause. Durch diese Echtzeitdemonstrationen und realen Interaktionen wird die Welt des verkörperten Gehirns erschlossen
