Wie schwierig ist es, einen wirklich humanoiden Roboter zu bauen? Wenn sich ein Roboter bewegt, machen normalerweise alle seine Gelenke ein klickendes Geräusch, aber das von OpenAI gesehene Startup-Unternehmen 1X kann etwas anderes tun. Sie haben letzte Woche den neuen öffentlichen Humanoiden Roboter NEO kann leise und praktisch sein. Wenn wir die Lautstärke des Videos aufdrehen, können wir das leichte Brummen des Motors hören, der sich nach unten beugt, um den Rucksack aufzunehmen.  Nachdem ich mir dieses Video angesehen habe, möchte ich wirklich fragen: Ist das nicht wirklich ein Mensch, der ein Holster trägt? Heutige Industrieroboter können sich sehr schnell bewegen, müssen aber auf eine extrem langsame Geschwindigkeit herunterfahren, bevor sie mit Dingen in Kontakt kommen. Um die Sicherheit zu gewährleisten, müssen diese Roboter oft in Sicherheitskäfigen gehalten werden, aber NEO kann das Mädchen im Video sanft umarmen und ihr auf natürliche und sanfte Weise ihre Schultasche geben. Wie wird das gemacht? Eric Jang, Vizepräsident für KI bei 1X Technologies, hat einen Blog geschrieben, in dem er die Technologie hinter NEO enthüllt.
Nachdem ich mir dieses Video angesehen habe, möchte ich wirklich fragen: Ist das nicht wirklich ein Mensch, der ein Holster trägt? Heutige Industrieroboter können sich sehr schnell bewegen, müssen aber auf eine extrem langsame Geschwindigkeit herunterfahren, bevor sie mit Dingen in Kontakt kommen. Um die Sicherheit zu gewährleisten, müssen diese Roboter oft in Sicherheitskäfigen gehalten werden, aber NEO kann das Mädchen im Video sanft umarmen und ihr auf natürliche und sanfte Weise ihre Schultasche geben. Wie wird das gemacht? Eric Jang, Vizepräsident für KI bei 1X Technologies, hat einen Blog geschrieben, in dem er die Technologie hinter NEO enthüllt.
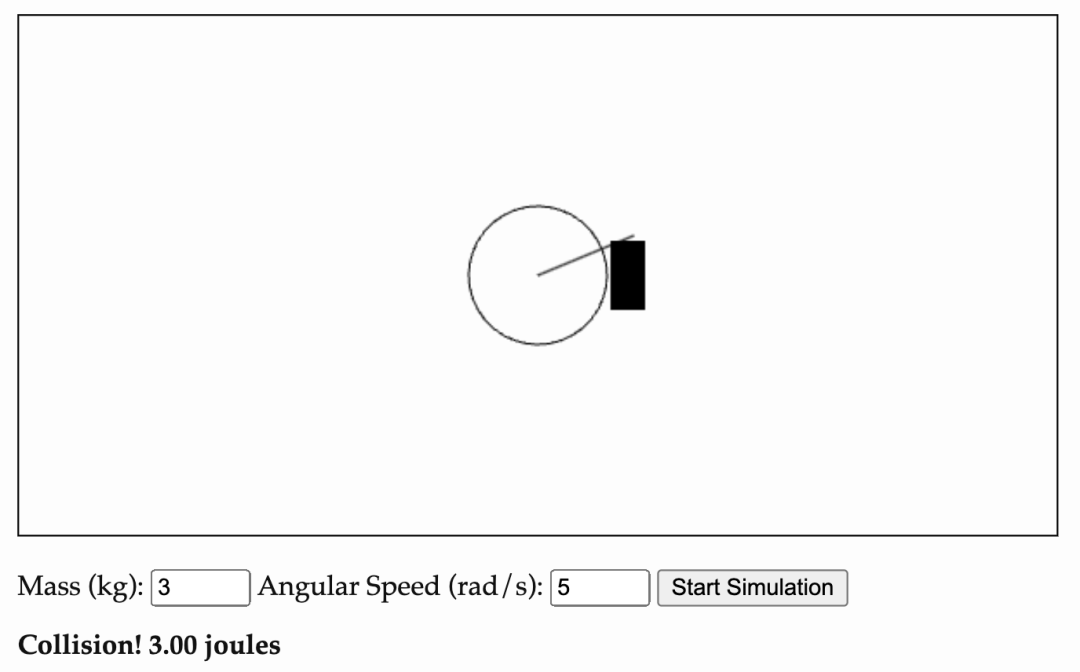
Er nannte diesen Blog ein Tutorial zu Motorträgheit und Getriebesystemen. Bevor Eric Jang zu 1X Technologies kam, arbeitete er sechs Jahre lang in der Robotik-Forschungsabteilung von Google, gab jedoch zu, dass er die Bedeutung dieser Konzepte erst tief verstanden habe, als er zu 1X Technologies kam. Durch die Durchführung physikalischer Berechnungen selbst gelangte Eric Jang zu der Überzeugung, dass leichte und drehmomentstarke Motoren der Schlüssel zum Bau universeller Roboter mit Lernfähigkeiten sind. Ist das laute Geräusch auf die geringe Effizienz der gemeinsamen kinetischen Energieumwandlung zurückzuführen? Stellen Sie sich ein Rad mit einem Gewicht von 3 kg und einem Radius von 0,4 m vor, das sich mit 5 Bogenmaß pro Sekunde dreht. Vom Rad aus erstreckt sich ein Hebel, der mit einem stationären Block kollidiert. Gehen Sie davon aus, dass die Kollision völlig unelastisch ist, was bedeutet, dass das Rad nach der Kollision nicht mehr durchdreht und nicht vom Block abprallt. Um die Berechnungen zu vereinfachen, gehen wir davon aus, dass der Hebelarm keine Masse hat und nur dazu dient, die Drehung des Rades zu verhindern. Gemäß der Rotationskinetikenergieformel , wobei I das Trägheitsmoment und ω die Winkelgeschwindigkeit ist. Da angenommen wird, dass der Hebel keine Masse hat, entspricht die Trägheit des Systems der eines festen Zylinders: . Wenn wir die Werte einsetzen, erhalten wir I = 0,24 kg⋅m^2. Daher kann die kinetische Rotationsenergie dieses Systems weiter auf 3 Joule berechnet werden. Bei einer realen inelastischen Kollision bleibt der Gesamtimpuls des Rades und des Blocks erhalten, ihre gesamte kinetische Energie jedoch nicht. Daher beträgt die kinetische Rotationsenergie des Systems weniger als 3 Joule. Energie ist eine Erhaltungsgröße, wohin geht also der Rest der kinetischen Energie? Die Antwort ist, dass ein Teil der kinetischen Energie in Bewegung umgewandelt wird und die verbleibende kinetische Energie in Form von Wärmeenergie, Schall und innerer Materialverformung verbraucht wird. Wenn Sie bei der Bewegung eines Roboters ein lautes Geräusch hören, liegt das daran, dass die Übertragung der kinetischen Energie ineffizient ist, mechanische Arbeit in Schall umgewandelt wird und Energie verschwendet wird. Da der Holzblock die Bewegung des Hebels verhindert, sinkt die neue Geschwindigkeit des Rades auf Null und die entsprechende kinetische Energie sinkt ebenfalls auf Null. Das bedeutet, dass die gesamte kinetische Energie in eine andere Energieform umgewandelt werden muss, damit das Rad aufhört, sich zu drehen. Glücklicherweise sind 3 Joule nicht viel Energie, es entspricht einem Welpen, der mit 1 m/s auf Sie zuläuft und zum Stehen kommt. Kollision nach dem Hinzufügen eines GetriebesDas obige System leicht modifizieren: Jetzt haben wir es zwei Räder, jedes Rad hat eine Masse von 1,5 kg und einen Radius von 0,4 Metern. Die beiden Räder drehen sich mit 5 rad/s bzw. 50 rad/s (d. h. zehnmal so schnell wie das erste Rad) und kollidieren mit einem festen Block. Das zweite Rad dreht sich zehnmal schneller als das erste Rad und treibt über ein Getriebe das erste Rad an. Dieses Setup entspricht einem Untersetzungsverhältnis von 10:1, wodurch die Endgeschwindigkeit des Hebels verringert wird. Die kinetische Energie des Systems ist die Summe der kinetischen Rotationsenergie der beiden Räder. Wie im vorherigen Beispiel kommt das System nach der Kollision zum Stillstand und die gesamte kinetische Energie muss in Form von Wärme, Lärm und Materialverformung abgeführt werden. Obwohl der Hebel den Block mit der gleichen Geschwindigkeit wie zuvor berührt, ist die gesamte kinetische Energie (150 Joule) 50-mal so hoch wie beim ursprünglichen Einzelradsystem! Wenn das Übersetzungsverhältnis nach Robotergetriebestandards auf 100 erhöht wird, beträgt die gesamte kinetische Energie, die abgeführt werden muss, 15.000 Joule. Das entspricht ungefähr dem Schlag eines Baseballs mit 1.000 Meilen pro Stunde. Bei dieser Geschwindigkeit wird jedes Objekt, auf das der Hebel trifft, vollständig zerstört. Natürlich ist auch das Getriebe selbst nicht immun. Das mag ein wenig kontraintuitiv sein, da Getriebeverbindungen oft auf Sicherheit ausgelegt sind. Wenn die Endgeschwindigkeit des Hebels unverändert bleibt, die Gesamtmasse des Rades unverändert bleibt und kein Holzblock die Bewegung des Hebels verhindert und die Bewegungen der beiden Gerätesätze getrennt aufgezeichnet und beobachtet werden, dann haben Sie Allein durch das Ansehen des Videos kann man den Unterschied nicht erkennen. Aber wenn es um Kollisionen geht – insbesondere solche, die unerwartet sind – sieht die Sache ganz anders aus.Die Physik rotierender Motoren ist entscheidend für die sichere Interaktion humanoider Roboter mit der Welt. Die meisten Unternehmen der humanoiden Robotik entscheiden sich für den Einsatz von Robotern in Fabriken statt zu Hause, da sie auf starre Hochgeschwindigkeitsgetriebesysteme angewiesen sind. Genau wie die oben erwähnte „zerstörende“ kinetische Energie des Baseballs ist diese Art von System in der Nähe von Menschen nicht sicher, daher müssen sie von Schutzkäfigen umgeben sein. Denken Sie, wenn Sie möchten, dass der Roboter schnell eine Tasse Kaffee bringt, muss sich der Endeffektor seiner Gliedmaßen schnell bewegen, was bedeutet dass sich auf der anderen Seite der Gliedmaßen und Zahnräder des Roboters ein Motor befinden muss, dessen Geschwindigkeit viel höher ist als die des Endeffektors. Da die kinetische Energie proportional zum Quadrat der Winkelgeschwindigkeit ist, werden die Bewegungen des Roboters tatsächlich durch die Trägheit der schnell rotierenden Zahnräder und nicht durch die Gliedmaßenverbindungen des Roboters selbst gesteuert. Professor Russ Tedrake vom MIT gab in seiner Vorlesung eine wunderbare Erklärung für diese kontraintuitiven Roboterdynamikphänomene. Kurslink: https://manipulation.csail.mit.edu/robot. html Warum Getriebe verwenden, wenn sie Energie verbrauchen und unsicher sind?
Der Grund dafür ist, dass das Getriebe eine entscheidende mechanische Hebelwirkung bietet: Viele Motoren können im Einzelbetrieb nicht genügend Drehmoment liefern, daher installieren Ingenieure Zahnräder bei Hochgeschwindigkeitsmotoren für das nötige Drehmoment geopfert.
Diese Art von Zahnradsystem ist „starr“ und kann nicht „umgekehrt“ angetrieben werden. Sobald die Zahnräder anfangen zu rotieren, greifen sie fest ineinander und es wird schwierig, sie zu drehen Kehren Sie um. Am anderen Ende des Getriebes muss also mehr Kraft aufgewendet werden, um der vom Hochgeschwindigkeitsmotor erzeugten Rotationskraft standzuhalten.
Basierend auf den oben genannten Überlegungen engagiert sich 1X Technologies seit zehn Jahren für die Herstellung von Motoren mit hohem Drehmoment und niedriger Drehzahl, um die Sicherheit des Übertragungssystems zu maximieren. Dank des vom NEO-Roboter verwendeten Motor- und Antriebssystems mit kleineren Übersetzungsverhältnissen und geringerem Gewicht ist er der erste echte Haushaltsroboter, der sicher in die häusliche Umgebung integriert werden kann. Neudefinition der Bedeutung von Real-Life-Videos für das Robotertraining Zusätzlich zu Sammeln von Robotern Forscher können auch Videos aus der Ego-Perspektive von echten Menschen verwenden, um Roboter zu trainieren. Die Idee ist wie folgt:
1 Daten sind die Grundlage für Fortschritt allgemeiner Roboter. Roboterhardware ist teuer, und die Einstellung menschlicher Fernbediener zur Ausführung von Aufgaben mit sperriger Hardware ist ebenso teuer. Darüber hinaus ist die Effizienz der Fernsteuerung sehr gering und liegt weit unter der Geschwindigkeit, mit der Menschen Aufgaben direkt erledigen können.
2. Wenn wir Menschen Kopfkameras anschnallen und sie große Gummihandschuhe tragen lassen, die ihre Haut bedecken, können wir schnell einen großen Datensatz von Menschen sammeln, die verschiedene Aufgaben ausführen und Aufgaben. Normale Menschen erledigen in ihrem Alltag unbewusst eine Vielzahl unterschiedlicher Handlungen und betrieblicher Aufgaben. Obwohl es schwierig ist, die Rohbewegungsausgabe direkt wahrzunehmen, können wir durch die Analyse von Posenänderungen in Videos auf Aktionen schließen. Diese Art der Datenerfassung könnte dazu beitragen, Hindernisse für die Entwicklung von Allzweckrobotern abzubauen, bis fortschrittlichere Hardware verfügbar ist.
3. Es gibt viele Ego- und Third-Person-Videos im Internet, mit denen Roboter trainiert werden können, verschiedene Aktivitäten, die Menschen in Videos ausführen, zu erkennen und zu erlernen, wodurch sie weiter expandieren unsere Datengröße.
Bevor wir diese Art der Datenerfassung erweitern, ist es auch wichtig zu beachten, dass es in unserem Körper keine schnell rotierenden Teile gibt, verglichen mit einem Motor, der sich mit 5000 U/min dreht , die kinetische Energie der Muskeln ist sehr gering, die effektive Masse, die wir beim Bewegen tragen, ist auch viel kleiner. Sie werden also feststellen, dass die Gelenkwinkel eines Roboters zwar ungefähr denen eines Menschen entsprechen, die effektive Masse, die von seinen rotierenden Motoren bereitgestellt wird, jedoch möglicherweise gleich ist zu groß, um die Aufgabe geschickt auszuführen.
Selbst wenn wir effiziente Bewegungssteuerungsstrategien entwickeln, können Roboter bei der Ausführung von Aktionen wie dem einfachen Ein- und Ausschalten von Lichtern oder dem eleganten Laufen immer noch nicht die menschliche Geschwindigkeit und Gewandtheit erreichen. Denn die Kräfte, die Roboter beim Berühren von Objekten ausüben, unterscheiden sich deutlich von denen des Menschen.
Wenn Sie also menschliche Videos schnell in Roboterbewegungsstrategien umwandeln möchten, benötigen Sie die folgenden Methoden:
1. Ein sehr nachgiebiger und flexibler Roboter wie NEO
2. Lassen Sie den Roboter die Bewegungsbahn des Videos mit einer Geschwindigkeit verfolgen, die langsamer als 1x ist, anstatt es direkt zu kopieren. Dynamik der „menschlichen Hardware“. Dies eignet sich jedoch nur für statische Betriebsaufgaben und nicht für Aufgaben, die den Kontakt mit vielen Gegenständen erfordern, wie zum Beispiel das Falten von Kleidung und das Zubereiten von Speisen in der Küche.
3. Entkoppeln Sie Bewegungsplanung und dynamische Planung, sodass sich die Bewegungsplanung auf das Erreichen der Zielposition konzentrieren kann, während sich die dynamische Planung auf die Kontrolle der Kraft konzentriert, wenn eine Kollision auftritt. Das obige ist der detaillierte Inhalt vonWie schwierig ist es für einen Roboter, die Kraft seiner Hände zu beherrschen und die Hausarbeit sicher zu erledigen? Der Vizepräsident von 1X Artificial Intelligence schreibt eine ausführliche Erklärung. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!




 , wobei I das Trägheitsmoment und ω die Winkelgeschwindigkeit ist. Da angenommen wird, dass der Hebel keine Masse hat, entspricht die Trägheit des Systems der eines festen Zylinders:
, wobei I das Trägheitsmoment und ω die Winkelgeschwindigkeit ist. Da angenommen wird, dass der Hebel keine Masse hat, entspricht die Trägheit des Systems der eines festen Zylinders:  . Wenn wir die Werte einsetzen, erhalten wir I = 0,24 kg⋅m^2. Daher kann die kinetische Rotationsenergie dieses Systems weiter auf 3 Joule berechnet werden.
. Wenn wir die Werte einsetzen, erhalten wir I = 0,24 kg⋅m^2. Daher kann die kinetische Rotationsenergie dieses Systems weiter auf 3 Joule berechnet werden. 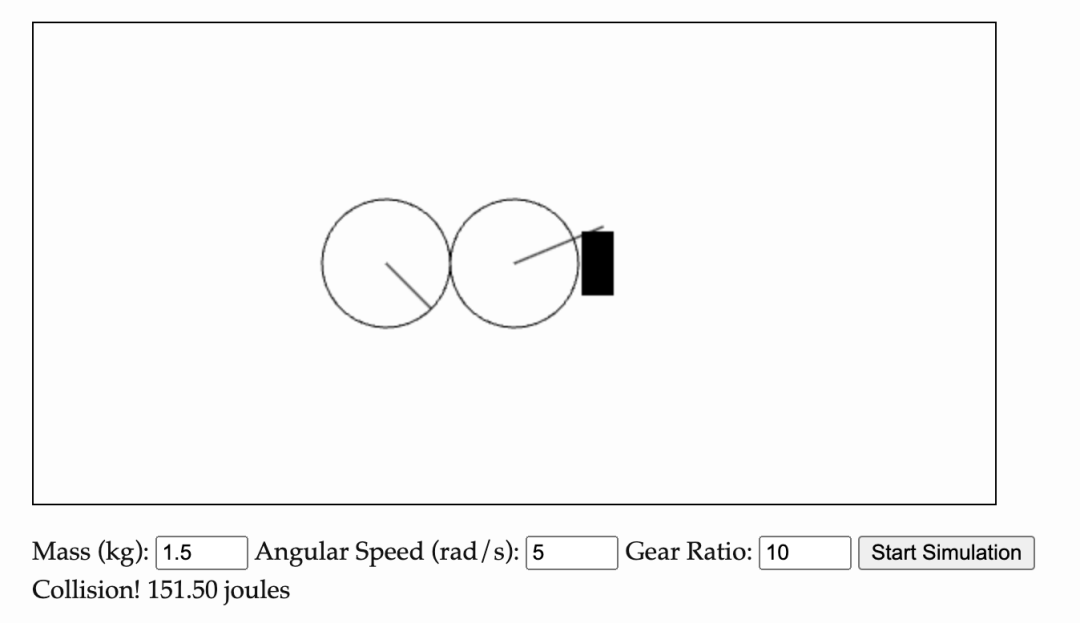

 So flashen Sie ein Xiaomi-Telefon
So flashen Sie ein Xiaomi-Telefon
 So zentrieren Sie ein Div in CSS
So zentrieren Sie ein Div in CSS
 So öffnen Sie eine RAR-Datei
So öffnen Sie eine RAR-Datei
 Methoden zum Lesen und Schreiben von Java-DBF-Dateien
Methoden zum Lesen und Schreiben von Java-DBF-Dateien
 So lösen Sie das Problem, dass die Datei msxml6.dll fehlt
So lösen Sie das Problem, dass die Datei msxml6.dll fehlt
 Häufig verwendete Permutations- und Kombinationsformeln
Häufig verwendete Permutations- und Kombinationsformeln
 Virtuelle Mobiltelefonnummer, um den Bestätigungscode zu erhalten
Virtuelle Mobiltelefonnummer, um den Bestätigungscode zu erhalten
 dynamisches Fotoalbum
dynamisches Fotoalbum








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



