

Python verwendet OpenCV zur Kalibrierung

Dieser Artikel stellt hauptsächlich die Verwendung von OpenCV zur Kalibrierung in Python vor. Jetzt kann ich ihn mit allen teilen, die ihn benötigen.
Dieser Artikel kombiniert die offiziellen OpenCV-Beispiele Stellen Sie ein offizielles Beispiel bereit. Ändern Sie den Code im Beispiel, damit er normal ausgeführt werden kann, und führen Sie Experimente und Erklärungen zu den von Ihnen gesammelten Daten durch.
1. Vorbereitung
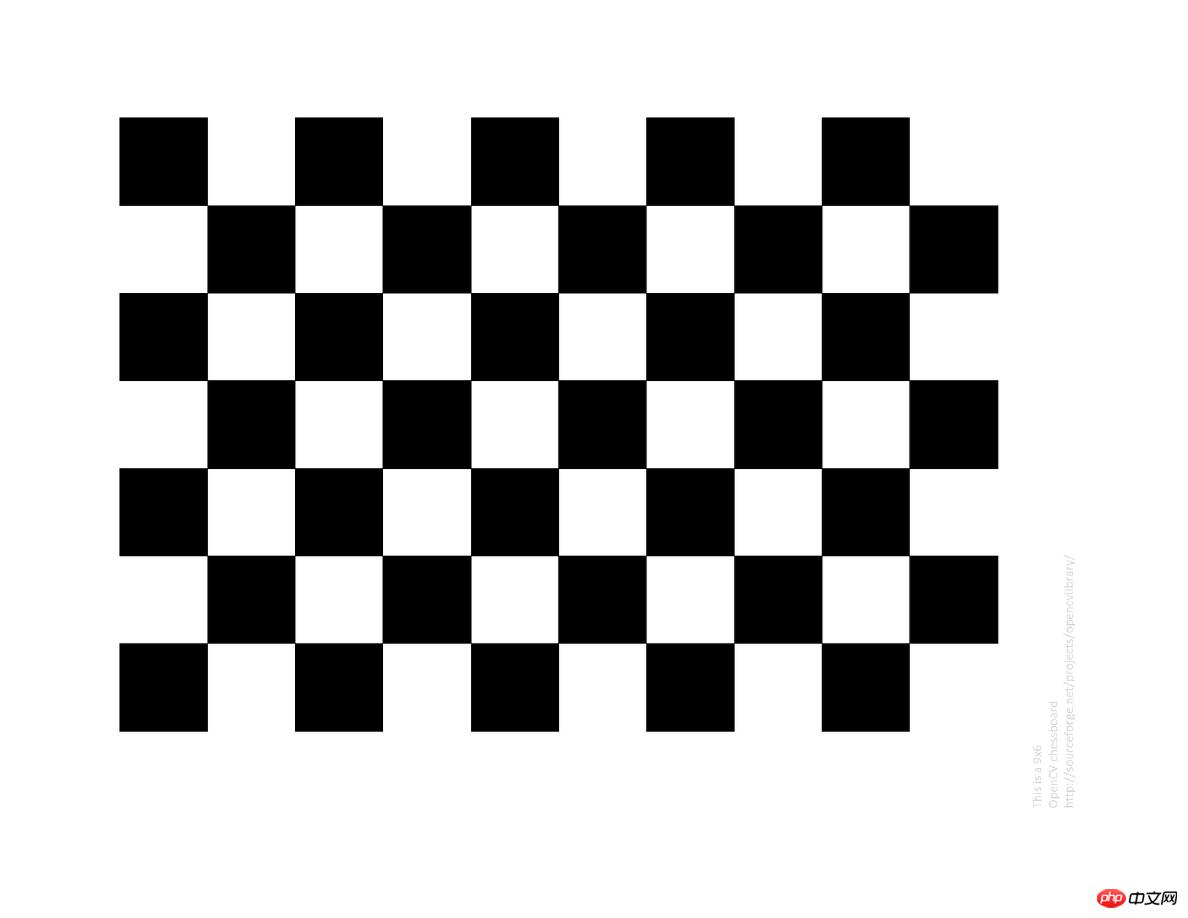
OpenCV verwendet ein Schachbrett zur Kalibrierung, wie in der Abbildung unten gezeigt. Um die Kamera zu kalibrieren, müssen wir eine Reihe von 3D-Punkten und die entsprechenden 2D-Bildpunkte eingeben. Auf einem schwarz-weißen Schachbrett lassen sich zweidimensionale Bildpunkte durch Eckenerkennung leicht finden. Was ist mit dreidimensionalen Punkten in der realen Welt? Während unserer Sammlung platzierten wir die Kamera an einer Stelle, bewegten die Schachbrett-Kalibrierungsplatte an verschiedene Positionen und fotografierten sie dann. Wir müssen also den Wert von (X,Y,Z) kennen. Vereinfacht ausgedrückt definieren wir die Ebene, auf der sich das Schachbrett befindet, als XY-Ebene, also Z=0. Für die Kalibrierungstafel können wir die quadratische Größe des Schachbretts kennen, z. B. 30 mm, sodass wir die Eckpunktkoordinaten auf dem Schachbrett als (0,0,0), (30,0,0), (60, 0,0),..., die Einheit dieses Ergebnisses ist mm.
3D-Punkte werden als Objektpunkte bezeichnet, und 2D-Bildpunkte werden als Bildpunkte bezeichnet.
2. Schachbretteckpunkte erkennen
Um die Schachbrettvorlage zu finden, verwenden wir openCV Die Funktion cv2.findChessboardCorners(). Wir müssen dem Programm auch mitteilen, welche Spezifikationen die von uns verwendete Vorlage hat, z. B. ein 8*8-Schachbrett oder ein 5*5-Schachbrett. Es wird empfohlen, eine Schachbrettvorlage mit ungleichen Zahlen in x- und y-Richtung zu verwenden. Im folgenden Experiment verwenden wir ein 10*7 Schachbrett. Jedes Quadrat hat eine Seitenlänge von 20 mm, was bedeutet, dass es 9*6 Innenecken enthält. Wenn diese Funktion die Vorlage erkennt, gibt sie den entsprechenden Eckpunkt zurück und gibt true zurück. Natürlich finden nicht alle Bilder die erforderliche Vorlage, daher können wir mehrere Bilder zur Kalibrierung verwenden. Zusätzlich zur Verwendung eines Schachbretts können wir auch eine Punktmatrix verwenden, und die entsprechende Funktion ist cv2.findCirclesGrid().
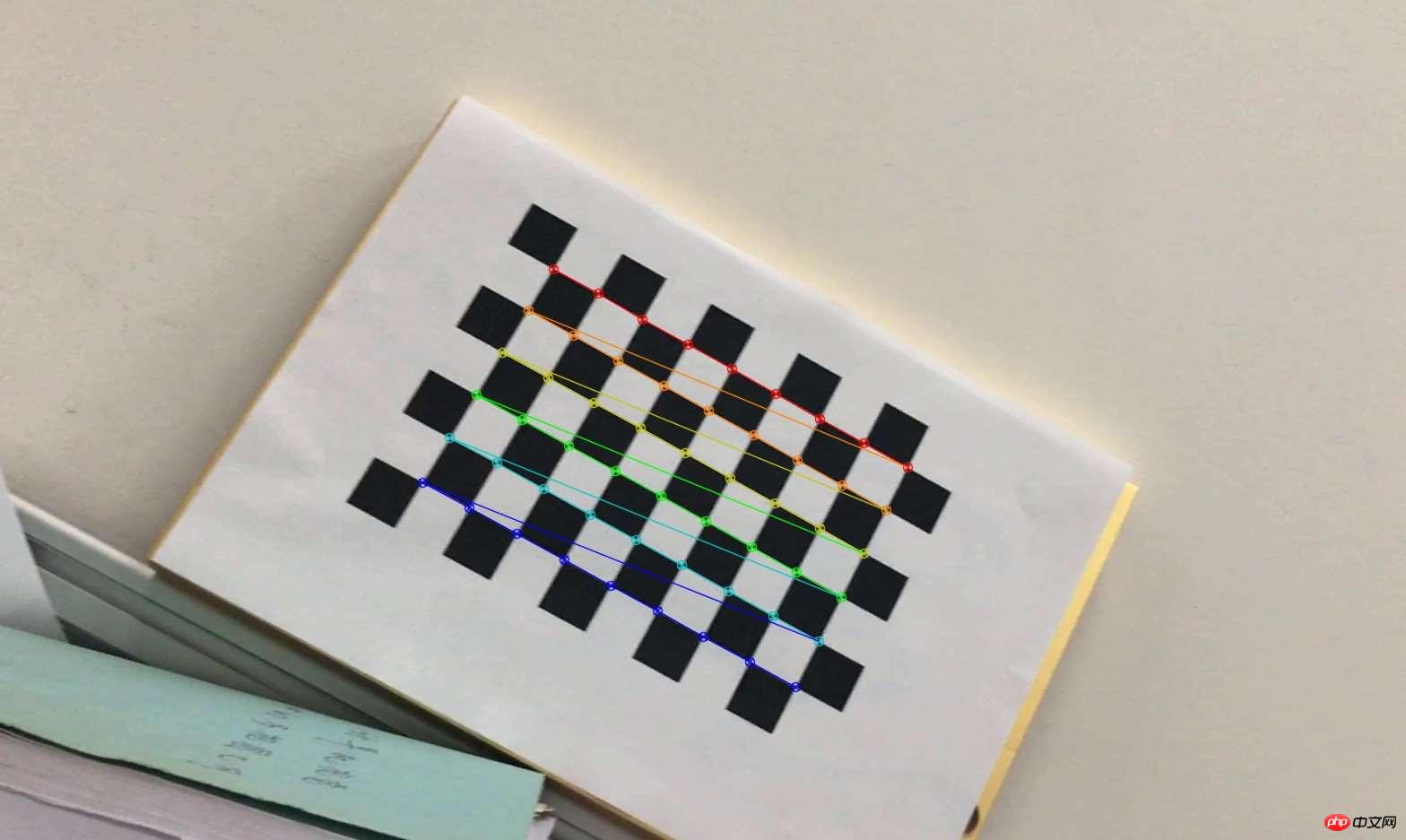
Nachdem wir den Eckpunkt gefunden haben, können wir cv2.cornerSubPix() verwenden, um genauere Eckpixelkoordinaten zu erhalten. Wir können auch cv2.drawChessboardCorners() verwenden, um die Ecken zur Anzeige auf das Bild zu zeichnen. Wie in der Abbildung unten gezeigt:
3. Kalibrierung
Durch die oben genannten Schritte Wir erhalten die zur Kalibrierung verwendeten dreidimensionalen Punkte und die entsprechenden zweidimensionalen Punktpaare auf dem Bild. Wir verwenden cv2.librateCamera() zur Kalibrierung. Diese Funktion gibt das Kalibrierungsergebnis, die intrinsische Parametermatrix, den Verzerrungskoeffizienten, die Rotationsmatrix und den Translationsvektor zurück.
4. Entzerrung
Im dritten Schritt haben wir die kamerainternen Parameter und Verzerrungskoeffizienten ermittelt Im Bild können wir auch cv.getOptimalNewCameraMatrix() verwenden, um die internen Parameter und Verzerrungskoeffizienten zu optimieren, indem wir den freien Skalierungsfaktor Alpha festlegen. Wenn Alpha auf 0 gesetzt ist, wird ein getrimmter innerer Parameter und Verzerrungskoeffizient zurückgegeben, der unerwünschte Pixel nach der Entzerrung entfernt. Wenn Alpha auf 1 gesetzt ist, wird ein getrimmter innerer Parameter zurückgegeben, der zusätzliche schwarze Pixel enthält, und gibt zurück ein ROI für das Ausschneiden.
Dann können wir die neu erhaltene interne Parametermatrix und den Verzerrungskoeffizienten verwenden, um das Bild zu entzerren. Es gibt zwei Möglichkeiten, Verzerrungen zu entfernen:
(1) Verwenden Sie cv2.undistort()
Dies ist die direkteste Methode. Rufen Sie einfach die Funktion direkt auf. Erhalten Sie die Entzerrung Bild, das mit dem ROI oben zugeschnitten werden kann. Der Code lautet wie folgt:
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
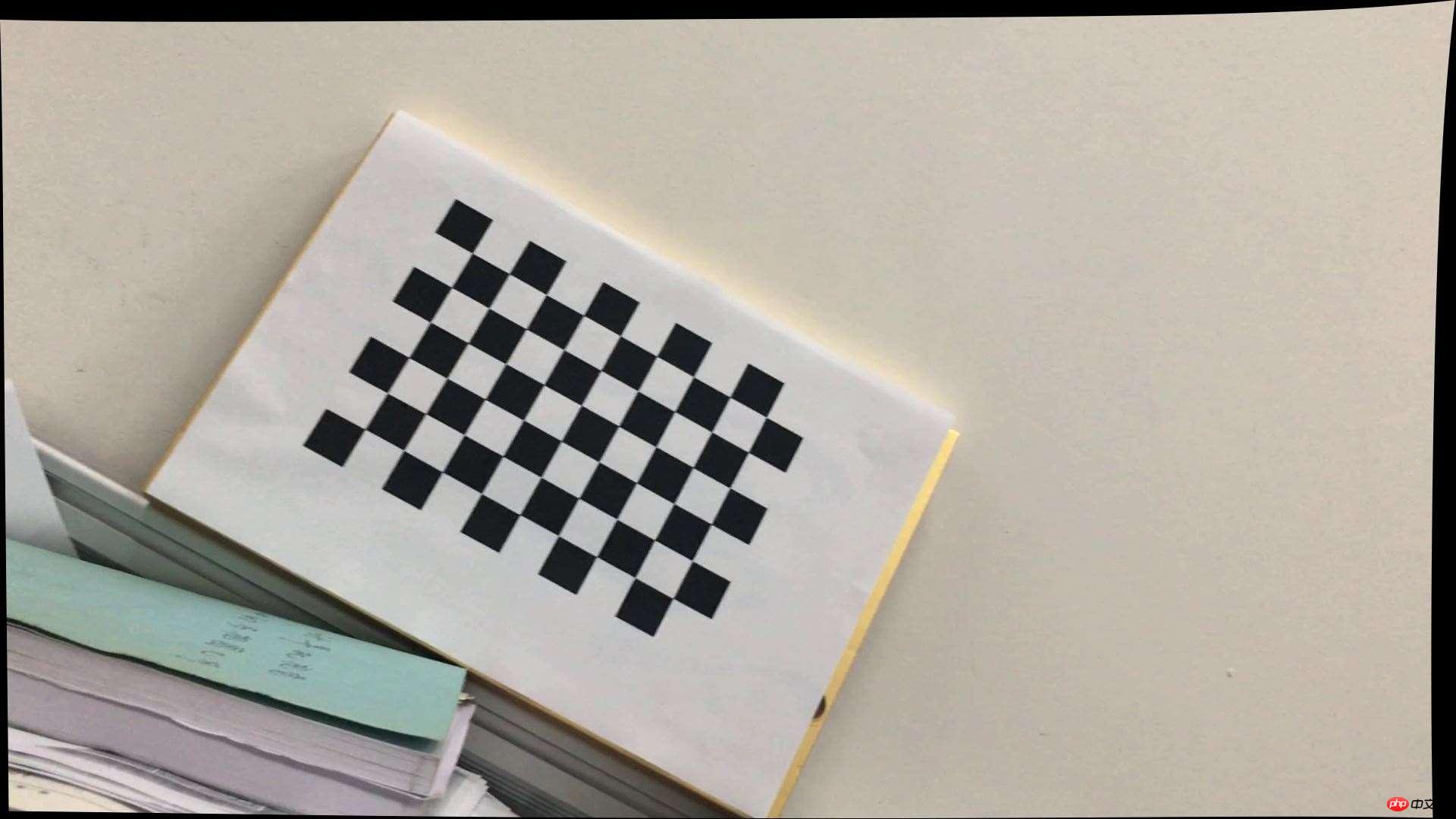
Das folgende Bild zeigt das Ergebnis der Entzerrung eines Bildes und der Beibehaltung schwarzer Pixel:
(2) Remmaping verwenden
Dies ist eine zweistufige Methode. Berechnen Sie zunächst eine Zuordnung vom verzerrten Bild zum unverzerrten Bild. und verwenden Sie dann diese Zuordnung, um das Bild zu entzerren.
Der Code lautet wie folgt:
# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
5. Rückprojektionsfehler
Durch den inversen Projektionsfehler können wir die Qualität der Ergebnisse bewerten. Je näher bei 0, desto idealer ist das Ergebnis. Verwenden Sie cv2.projectPoints (), um anhand der zuvor berechneten internen Parametermatrix, des Verzerrungskoeffizienten, der Rotationsmatrix und des Übersetzungsvektors die Projektion des dreidimensionalen Punkts auf das zweidimensionale Bild zu berechnen, und berechnen Sie dann den Fehler zwischen den erhaltenen Punkten Rückprojektion und der auf dem Bild erkannte Punkt. Schließlich wird ein durchschnittlicher Fehler für alle Kalibrierungsbilder berechnet, und dieser Wert ist der Rückprojektionsfehler.
Code
Der Code für alle Schritte lautet wie folgt:
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
Verwandte Empfehlungen:
Die Daten in OpenCVcv::Mat werden in die TXT-Datei geschrieben
Lese- und Schreibvorgänge von OpenCV cv.Mat- und .txt-Dateidaten
Das obige ist der detaillierte Inhalt vonPython verwendet OpenCV zur Kalibrierung. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1382
1382
 52
52

 PHP und Python: Code Beispiele und Vergleich
Apr 15, 2025 am 12:07 AM
PHP und Python: Code Beispiele und Vergleich
Apr 15, 2025 am 12:07 AM
PHP und Python haben ihre eigenen Vor- und Nachteile, und die Wahl hängt von den Projektbedürfnissen und persönlichen Vorlieben ab. 1.PHP eignet sich für eine schnelle Entwicklung und Wartung großer Webanwendungen. 2. Python dominiert das Gebiet der Datenwissenschaft und des maschinellen Lernens.
 Python gegen JavaScript: Community, Bibliotheken und Ressourcen
Apr 15, 2025 am 12:16 AM
Python gegen JavaScript: Community, Bibliotheken und Ressourcen
Apr 15, 2025 am 12:16 AM
Python und JavaScript haben ihre eigenen Vor- und Nachteile in Bezug auf Gemeinschaft, Bibliotheken und Ressourcen. 1) Die Python-Community ist freundlich und für Anfänger geeignet, aber die Front-End-Entwicklungsressourcen sind nicht so reich wie JavaScript. 2) Python ist leistungsstark in Bibliotheken für Datenwissenschaft und maschinelles Lernen, während JavaScript in Bibliotheken und Front-End-Entwicklungsbibliotheken und Frameworks besser ist. 3) Beide haben reichhaltige Lernressourcen, aber Python eignet sich zum Beginn der offiziellen Dokumente, während JavaScript mit Mdnwebdocs besser ist. Die Wahl sollte auf Projektbedürfnissen und persönlichen Interessen beruhen.
 Wie ist die GPU -Unterstützung für Pytorch bei CentOS?
Apr 14, 2025 pm 06:48 PM
Wie ist die GPU -Unterstützung für Pytorch bei CentOS?
Apr 14, 2025 pm 06:48 PM
Aktivieren Sie die Pytorch -GPU -Beschleunigung am CentOS -System erfordert die Installation von CUDA-, CUDNN- und GPU -Versionen von Pytorch. Die folgenden Schritte führen Sie durch den Prozess: Cuda und Cudnn Installation Bestimmen Sie die CUDA-Version Kompatibilität: Verwenden Sie den Befehl nvidia-smi, um die von Ihrer NVIDIA-Grafikkarte unterstützte CUDA-Version anzuzeigen. Beispielsweise kann Ihre MX450 -Grafikkarte CUDA11.1 oder höher unterstützen. Download und installieren Sie Cudatoolkit: Besuchen Sie die offizielle Website von Nvidiacudatoolkit und laden Sie die entsprechende Version gemäß der höchsten CUDA -Version herunter und installieren Sie sie, die von Ihrer Grafikkarte unterstützt wird. Installieren Sie die Cudnn -Bibliothek:
 Detaillierte Erklärung des Docker -Prinzips
Apr 14, 2025 pm 11:57 PM
Detaillierte Erklärung des Docker -Prinzips
Apr 14, 2025 pm 11:57 PM
Docker verwendet Linux -Kernel -Funktionen, um eine effiziente und isolierte Anwendungsumgebung zu bieten. Sein Arbeitsprinzip lautet wie folgt: 1. Der Spiegel wird als schreibgeschützte Vorlage verwendet, die alles enthält, was Sie für die Ausführung der Anwendung benötigen. 2. Das Union File System (UnionFS) stapelt mehrere Dateisysteme, speichert nur die Unterschiede, speichert Platz und beschleunigt. 3. Der Daemon verwaltet die Spiegel und Container, und der Kunde verwendet sie für die Interaktion. 4. Namespaces und CGroups implementieren Container -Isolation und Ressourcenbeschränkungen; 5. Mehrere Netzwerkmodi unterstützen die Containerverbindung. Nur wenn Sie diese Kernkonzepte verstehen, können Sie Docker besser nutzen.
 Miniopen CentOS -Kompatibilität
Apr 14, 2025 pm 05:45 PM
Miniopen CentOS -Kompatibilität
Apr 14, 2025 pm 05:45 PM
Minio-Objektspeicherung: Hochleistungs-Bereitstellung im Rahmen von CentOS System Minio ist ein hochleistungsfähiges, verteiltes Objektspeichersystem, das auf der GO-Sprache entwickelt wurde und mit Amazons3 kompatibel ist. Es unterstützt eine Vielzahl von Kundensprachen, darunter Java, Python, JavaScript und Go. In diesem Artikel wird kurz die Installation und Kompatibilität von Minio zu CentOS -Systemen vorgestellt. CentOS -Versionskompatibilitätsminio wurde in mehreren CentOS -Versionen verifiziert, einschließlich, aber nicht beschränkt auf: CentOS7.9: Bietet einen vollständigen Installationshandbuch für die Clusterkonfiguration, die Umgebungsvorbereitung, die Einstellungen von Konfigurationsdateien, eine Festplattenpartitionierung und Mini
 Wie man eine verteilte Schulung von Pytorch auf CentOS betreibt
Apr 14, 2025 pm 06:36 PM
Wie man eine verteilte Schulung von Pytorch auf CentOS betreibt
Apr 14, 2025 pm 06:36 PM
Pytorch Distributed Training on CentOS -System erfordert die folgenden Schritte: Pytorch -Installation: Die Prämisse ist, dass Python und PIP im CentOS -System installiert sind. Nehmen Sie abhängig von Ihrer CUDA -Version den entsprechenden Installationsbefehl von der offiziellen Pytorch -Website ab. Für CPU-Schulungen können Sie den folgenden Befehl verwenden: PipinstallTorChTorChVisionTorChaudio Wenn Sie GPU-Unterstützung benötigen, stellen Sie sicher, dass die entsprechende Version von CUDA und CUDNN installiert ist und die entsprechende Pytorch-Version für die Installation verwenden. Konfiguration der verteilten Umgebung: Verteiltes Training erfordert in der Regel mehrere Maschinen oder mehrere Maschinen-Mehrfach-GPUs. Ort
 So wählen Sie die Pytorch -Version auf CentOS aus
Apr 14, 2025 pm 06:51 PM
So wählen Sie die Pytorch -Version auf CentOS aus
Apr 14, 2025 pm 06:51 PM
Bei der Installation von PyTorch am CentOS -System müssen Sie die entsprechende Version sorgfältig auswählen und die folgenden Schlüsselfaktoren berücksichtigen: 1. Kompatibilität der Systemumgebung: Betriebssystem: Es wird empfohlen, CentOS7 oder höher zu verwenden. CUDA und CUDNN: Pytorch -Version und CUDA -Version sind eng miteinander verbunden. Beispielsweise erfordert Pytorch1.9.0 CUDA11.1, während Pytorch2.0.1 CUDA11.3 erfordert. Die Cudnn -Version muss auch mit der CUDA -Version übereinstimmen. Bestimmen Sie vor der Auswahl der Pytorch -Version unbedingt, dass kompatible CUDA- und CUDNN -Versionen installiert wurden. Python -Version: Pytorch Official Branch
 Python: Automatisierung, Skript- und Aufgabenverwaltung
Apr 16, 2025 am 12:14 AM
Python: Automatisierung, Skript- und Aufgabenverwaltung
Apr 16, 2025 am 12:14 AM
Python zeichnet sich in Automatisierung, Skript und Aufgabenverwaltung aus. 1) Automatisierung: Die Sicherungssicherung wird durch Standardbibliotheken wie OS und Shutil realisiert. 2) Skriptschreiben: Verwenden Sie die PSUTIL -Bibliothek, um die Systemressourcen zu überwachen. 3) Aufgabenverwaltung: Verwenden Sie die Zeitplanbibliothek, um Aufgaben zu planen. Die Benutzerfreundlichkeit von Python und die Unterstützung der reichhaltigen Bibliothek machen es zum bevorzugten Werkzeug in diesen Bereichen.
