

Die folgende Kolumne stellt allen in der Kolumne Golang-Tutorial die Golang-Coroutine-Planung vor. Ich hoffe, dass sie für Freunde hilfreich sein wird, die sie brauchen!

Werfen wir einen Blick auf Golangs Coroutine-Planung
Groutine kann über das GPM-Planungsmodell eine leistungsstarke Parallelitätsimplementierung haben. Lassen Sie uns das Goroutine-Planungsmodell erklären .
Gos Scheduler enthält drei wichtige Strukturen: M, P, G
M: M ist eine Kapselung von Threads auf Kernelebene, und die Anzahl entspricht der tatsächlichen Anzahl von CPUs. Ein M ist ein Thread und eine Goroutine läuft auf Oben M; M ist eine große Struktur, die viele Informationen wie den kleinen Objektspeicher-Cache (mcache), die aktuell ausgeführte Goroutine, den Zufallszahlengenerator usw. verwaltet. G: stellt eine Goroutine dar, die über einen eigenen Stapel verfügt Zeiger und andere Informationen (wartende Kanäle usw.) für die Planung.
P: Der vollständige Name von P ist Prozessor. Sein Hauptzweck ist die Ausführung von Goroutine. Jedes Prozessorobjekt verfügt über eine LRQ (Local Run Queue). Nicht zugewiesene Goroutine-Objekte werden in der GRQ (Global Run Queue) gespeichert und warten darauf, einem bestimmten P in der LRQ zugewiesen zu werden.
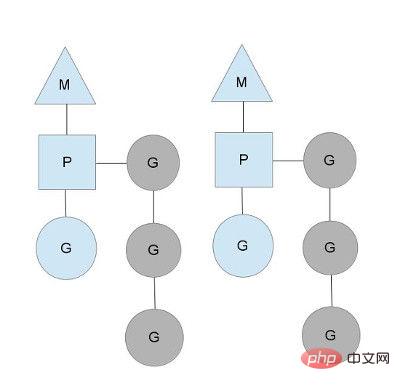
Die Anzahl von P kann über GOMAXPROCS() festgelegt werden, was tatsächlich die tatsächliche Parallelität darstellt, dh wie viele Goroutinen gleichzeitig ausgeführt werden können.
Die grauen Goroutinen im Bild werden nicht ausgeführt, befinden sich jedoch im Bereitschaftszustand und warten auf die Planung. P verwaltet diese Warteschlange (Runqueue genannt). In der Go-Sprache ist es einfach, eine Goroutine zu starten: Gehen Sie einfach zur Go-Funktion, sodass bei jeder Ausführung einer Go-Anweisung eine Goroutine am Ende der Runqueue-Warteschlange hinzugefügt wird und die nächste Zeitplan ist Klicken Sie, nehmen Sie eine Goroutine aus der Runqueue (wie entscheidet man, welche Goroutine verwendet werden soll?) und führen Sie sie aus.
Wenn es es nicht erhält, wird es den Goroutine-Put erhalten es in einem globalen Runqueue und dann von selbst schlafen (in den Thread-Cache legen). Alle P werden außerdem in regelmäßigen Abständen eine globale Überprüfung durchführen runqueue und führen Sie die darin enthaltene Goroutine aus, andernfalls wird die Goroutine in der globalen Runqueue niemals ausgeführt.

1. Die Anzahl von P:
2. Anzahl von M:
M hat keine absolute Beziehung zur Anzahl von P. Wenn ein M blockiert ist, erstellt P ein anderes M oder wechselt zu einem anderen. Daher können viele M erstellt werden, selbst wenn die Standardanzahl von P 1 ist.
3. Wenn P erstellt wird: Nachdem die maximale Anzahl n von P ermittelt wurde, erstellt das Laufzeitsystem n Ps basierend auf dieser Anzahl.
4. Wenn M erstellt wird: Es ist nicht genug M vorhanden, um es mit P zu verknüpfen und das ausführbare G darin auszuführen. Wenn beispielsweise zu diesem Zeitpunkt alle M blockiert sind und in P noch viele Aufgaben bereit sind, wird nach einem freien M gesucht. Wenn kein freies M vorhanden ist, wird ein neues M erstellt.
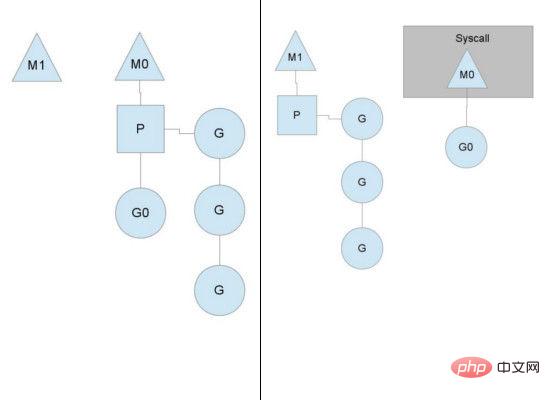
Wenn M aufgrund eines Systemaufrufs blockiert ist (wenn G, das auf M ausgeführt wird, in einen Systemaufruf eintritt), werden M und P getrennt. Wenn sich zu diesem Zeitpunkt Aufgaben in der Bereitschaftswarteschlange von P befinden, ordnet
P ein inaktives M zu. oder erstellen Sie ein M für Assoziation. (Das heißt, Go verarbeitet E/A-Blockierungen nicht wie libtask? Ich bin mir nicht sicher.)
Wenn alle Aufgaben in der Bereitschaftswarteschlange eines Ps ausgeführt wurden, versucht P, einen Teil der Bereitschaftswarteschlangen anderer Ps in seine eigene Bereitschaftswarteschlange zu übernehmen, um dies sicherzustellen dass die Bereitschaftswarteschlange jedes P Aufgaben hat, die ausgeführt werden können.
Das obige ist der detaillierte Inhalt vonInformationen zur Golang-Coroutine-Planung. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 So definieren Sie Variablen in Golang
So definieren Sie Variablen in Golang
 Welche Datenkonvertierungsmethoden gibt es in Golang?
Welche Datenkonvertierungsmethoden gibt es in Golang?
 Welche sind die am häufigsten verwendeten Bibliotheken in Golang?
Welche sind die am häufigsten verwendeten Bibliotheken in Golang?
 Was ist der Unterschied zwischen Golang und Python?
Was ist der Unterschied zwischen Golang und Python?
 Python-Crawler-Methode zum Abrufen von Daten
Python-Crawler-Methode zum Abrufen von Daten
 So verwenden Sie den Befehl „find', um Dateien unter Linux zu finden
So verwenden Sie den Befehl „find', um Dateien unter Linux zu finden
 Offizieller Website-Eingang der Okx-Handelsplattform
Offizieller Website-Eingang der Okx-Handelsplattform
 Welche Methoden gibt es, um SQL-Injection zu verhindern?
Welche Methoden gibt es, um SQL-Injection zu verhindern?
 So stellen Sie den binauralen Modus des Bluetooth-Headsets wieder her
So stellen Sie den binauralen Modus des Bluetooth-Headsets wieder her








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



