
 häufiges Problem
Wie heißen bei einem Mikrocomputer die Recheneinheit und der Controller zusammen?
häufiges Problem
Wie heißen bei einem Mikrocomputer die Recheneinheit und der Controller zusammen?
Wie heißen bei einem Mikrocomputer die Recheneinheit und der Controller zusammen?

In einem Mikrocomputer werden Recheneinheit und Steuerung zusammenfassend als „Mikroprozessor“ bezeichnet. Ein Mikroprozessor ist eine zentrale Verarbeitungseinheit, die aus einem oder mehreren hochintegrierten Schaltkreisen besteht. Im Allgemeinen ist ein Mikroprozessorchip mit Komponenten wie Controllern, Recheneinheiten, Registern und internen Bussen integriert, die diese verbinden.
In einem Mikrocomputer werden Recheneinheit und Controller zusammenfassend als „Mikroprozessor“ bezeichnet.
Mikroprozessor ist eine Zentraleinheit, die aus einem oder mehreren großen integrierten Schaltkreisen besteht. Diese Schaltkreise erfüllen die Funktionen von Steuerkomponenten und arithmetischen Logikkomponenten.
Im Allgemeinen integriert ein Mikroprozessorchip Komponenten wie Controller, Recheneinheiten, Register und interne Busse, die diese verbinden.
Der Mikroprozessor kann Vorgänge wie das Abrufen von Anweisungen, das Ausführen von Anweisungen und den Austausch von Informationen mit externen Speicher- und Logikkomponenten ausführen. Er ist der Rechensteuerungsteil des Mikrocomputers. Es kann mit Speicher- und Peripherieschaltungschips zu einem Mikrocomputer kombiniert werden.
Zusammensetzung
Der Mikroprozessor besteht aus einer arithmetischen Logikeinheit (ALU), einem Akkumulator und einer allgemeinen Registerprogrammgruppe (auch als Befehlsanzeiger bezeichnet); /buffer; interne Buszusammensetzung. Der Bediener und die Steuerung sind seine Hauptkomponenten.
Arithmetisch-logische Einheit
Die arithmetisch-logische Einheit ALU führt hauptsächlich arithmetische Operationen (+, -, ×, ÷, Vergleich) und verschiedene logische Operationen (UND, ODER, NICHT, XOR, Verschiebung) und andere Operationen durch. ALU ist eine kombinatorische Schaltung und hat nicht die Funktion, Operanden zu registrieren. Daher muss sie über zwei Register zum Speichern von Operanden verfügen: das temporäre Register TMP und den Akkumulator AC. Der Akkumulator stellt der ALU nicht nur Operanden zur Verfügung, sondern empfängt auch die Operationsergebnisse.
Das Registerarray entspricht tatsächlich dem RAM im Mikroprozessor. Es besteht aus zwei Teilen: einer allgemeinen Registergruppe und einer speziellen Registergruppe. Die allgemeinen Register (A, B, C, D) werden zum Speichern von Daten verwendet Ergebnisse oder Adressen, die an Operationen beteiligt sind. Sie können im Allgemeinen als zwei 8-Bit-Register verwendet werden. Mit diesen Registern im Prozessor können häufige Zugriffe auf den Speicher vermieden, die Befehlslänge und die Befehlsausführungszeit verkürzt, die Laufgeschwindigkeit der Maschine verbessert und die Programmierung erleichtert werden. Zu den Sonderregistern gehören der Programmzähler PC, der Stapelzeiger SP und das Flag-Register FR. Ihre Funktionen sind fest und dienen der Speicherung von Adressen oder Adressbasiswerten. Darunter:
A) Der Programmzähler-PC wird zum Speichern der Adresse des nächsten auszuführenden Befehls verwendet und steuert somit die Ausführungssequenz des Programms. Unter der Bedingung der sequentiellen Ausführung von Anweisungen wird der Inhalt von PC jedes Mal, wenn ein Byte der Anweisung abgerufen wird, automatisch um 1 erhöht. Bei einer Programmübertragung muss die neue Befehlsadresse (Zieladresse) in den PC geladen werden, was in der Regel durch einen Übertragungsbefehl umgesetzt wird.
B) Der Stapelzeiger SP wird zum Speichern der obersten Adresse des Stapels verwendet. Der Stapel ist ein bestimmter Bereich im Speicher. Es funktioniert nach der „Last-In-First-Out“-Methode. Wenn neue Daten in den Stapel verschoben werden, bleiben die ursprünglichen Informationen im Stapel unverändert und nur die oberste Position des Stapels ändert sich Daten oben im Stapel werden automatisch angezeigt. Passen Sie die oberste Position des Stapels automatisch an. Mit anderen Worten: Wenn Daten vom Stapel verschoben oder entfernt werden, erfolgt dies immer oben auf dem Stapel. Sobald der Stapel initialisiert ist (d. h. die Position des unteren Endes des Stapels im Speicher wird bestimmt), wird der Inhalt des SP (d. h. die Position des oberen Endes des Stapels) automatisch von der CPU verwaltet.
C) Das Flag-Register wird auch als Programmstatuswort-Register (PSW) bezeichnet, das zum Speichern der Ergebniseigenschaften nach der Ausführung von arithmetischen und logischen Operationsanweisungen verwendet wird. Wenn das Ergebnis beispielsweise 0 ist, handelt es sich um einen Übertrag oder einen Überlauf Flag wird generiert usw.
Timing- und Steuerlogik ist die zentrale Steuerkomponente des Mikroprozessors. Sie ist für die Steuerung des gesamten Computers verantwortlich, einschließlich des Abrufens von Anweisungen aus dem Speicher, der Analyse der Anweisungen (d. h. der Befehlsdekodierung), um die Befehlsoperation und Operandenadresse zu bestimmen, und das Abrufen der Operanden und die Ausführung der durch die Anweisung angegebenen Operation sendet das Operationsergebnis an den Speicher oder den E/A-Port usw. Außerdem sendet es entsprechende Steuersignale an andere Komponenten des Mikrocomputers, um die internen und externen Komponenten der CPU zu koordinieren.
Der interne Bus dient der Verbindung der Funktionskomponenten des Mikroprozessors und der Übertragung von Daten und Steuersignalen innerhalb des Mikroprozessors.
Es muss darauf hingewiesen werden, dass der Mikroprozessor selbst kein eigenständiges Arbeitssystem darstellen und auch keine eigenständigen Programme ausführen kann. Er muss mit Speicher sowie Eingabe- und Ausgabegeräten ausgestattet sein, um einen vollständigen Mikrocomputer zu bilden, bevor er unabhängig arbeiten kann.
Speicher
Der Speicher eines Mikrocomputers dient zum Speichern von Programmen und Daten, die gerade verwendet werden oder häufig verwendet werden. Speicher werden basierend auf Lese- und Schreibmethoden in Arbeitsspeicher (RAM) und Nur-Lese-Speicher (ROM) unterteilt. RAM wird auch Lese-/Schreibspeicher genannt. Während der Arbeit kann die CPU ihren Inhalt jederzeit nach Bedarf lesen oder schreiben. RAM ist ein flüchtiger Speicher, d. h. sein Inhalt geht verloren, wenn der Strom ausgeschaltet wird, sodass er nur temporäre Programme und Daten speichern kann. Der Inhalt des ROM kann nur gelesen, aber nicht geschrieben werden. Die im ROM gespeicherten Informationen bleiben nach dem Ausschalten der Stromversorgung unverändert. Daher wird ROM häufig zur dauerhaften Speicherung von Programmen und Daten verwendet. Wie das anfängliche Startprogramm, das Überwachungsprogramm, das BIOS des grundlegenden Eingabe- und Ausgabeverwaltungsprogramms im Betriebssystem usw.
I/O-Schnittstelle
Die Eingangs-/Ausgangsschnittstellenschaltung ist ein wichtiger Bestandteil des Mikrocomputers. Es handelt sich um eine logische Steuerschaltung für Mikrocomputer, um externe Ein- und Ausgabegeräte und verschiedene Steuerobjekte anzuschließen und Informationen mit der Außenwelt auszutauschen. Da Peripheriegeräte unterschiedliche Strukturen, Arbeitsgeschwindigkeiten, Signalformen und Datenformate aufweisen, müssen sie zur Zwischenkonvertierung verwendet werden, um den Informationsaustausch mit der CPU zu erreichen. Die E/A-Schnittstelle wird auch als E/A-Adapter bezeichnet und verschiedene Peripheriegeräte müssen mit unterschiedlichen E/A-Adaptern ausgestattet sein. Die I/O-Schnittstellenschaltung ist ein unverzichtbarer und wichtiger Bestandteil des Mikrocomputer-Anwendungssystems. Bei der Entwicklung und Gestaltung jedes Mikrocomputer-Anwendungssystems geht es eigentlich hauptsächlich um die Entwicklung und Gestaltung von E/A-Schnittstellen. Daher ist die I/O-Schnittstellentechnologie einer der wichtigen Inhalte, die in diesem Kurs behandelt werden, und wir werden sie in Kapitel 8 ausführlich vorstellen.
Bus
Der Bus ist ein gemeinsamer Kanal zur Übertragung von Informationen zwischen Komponenten in einem Computersystem und ein wichtiger Bestandteil eines Mikrocomputers. Es besteht aus mehreren Kommunikationsleitungen und verschiedenen Drei-Zustands-Gate-Geräten zur Ansteuerung und Isolierung. Mikrocomputer nehmen strukturell immer eine Busstruktur an, das heißt, die Funktionskomponenten, aus denen der Mikrocomputer besteht (Mikroprozessor, Speicher, E/A-Schnittstellenschaltung usw.), sind über einen Bus verbunden. Dies ist eine einzigartige Struktur von Mikrocomputersystemen. bei. Nach der Übernahme der Busstruktur wird die gegenseitige Beziehung zwischen den Funktionskomponenten im System in eine einzige Beziehung zwischen jeder dem Bus zugewandten Komponente umgewandelt. Solange eine Komponente (Funktionsplatine/Karte) dem Busstandard entspricht, kann sie angeschlossen werden Anbindung an das System über diesen Busstandard, was eine einfache Erweiterung oder Aktualisierung der Systemfunktionen, eine einfache Struktur und eine deutlich verbesserte Zuverlässigkeit ermöglicht. In Mikrocomputern können Busse entsprechend ihrem Standort und ihrer Anwendung in die folgenden vier Ebenen unterteilt werden, wie in Abbildung 1.4 dargestellt.
(1) On-Chip-Bus: Er befindet sich im Mikroprozessorchip und wird daher als interner Chipbus bezeichnet. Es dient der Verbindung und Informationsübertragung zwischen der internen ALU und verschiedenen Registern des Mikroprozessors (der interne Bus in Abbildung 1.3 ist der On-Chip-Bus). Aufgrund der begrenzten Chipfläche und der Anzahl externer Pins verwenden die meisten On-Chip-Busse eine Einzelbusstruktur, was zur Verbesserung der Chipintegration und -ausbeute beiträgt. Wenn eine Beschleunigung der internen Datenübertragung erforderlich ist, ist ein Doppelbus erforderlich Es kann auch eine Drei-Bus-Struktur verwendet werden.
(2) Chipbus: Der Chipbus wird auch als Bus auf Komponentenebene (Chipebene) oder lokaler Bus bezeichnet. Mikrocomputer-Motherboards, einzelne Trigger und andere Steckplatinen und -karten (z. B. verschiedene I/O-Schnittstellenplatinen/-karten) sind selbst ein vollständiges Subsystem. Die Platine/Karte enthält verschiedene CPU-, RAM-, ROM- und I/O-Schnittstellen Chips wie diese werden auch über Busse verbunden, da dies dazu beiträgt, die Struktur zu vereinfachen, Verbindungen zu reduzieren, die Zuverlässigkeit zu verbessern und die Informationsübertragung und -steuerung zu erleichtern. Der Bus, der Chips auf verschiedenen Platinen und Karten verbindet, wird üblicherweise als Chip-Bus oder Bus auf Komponentenebene bezeichnet.
Im Vergleich zu einem kompletten Mikrocomputer sind verschiedene Platinen/Karten nur ein Subsystem und ein Teil, daher wird der Chipbus auch als lokaler Bus bezeichnet und der Bus, der zur Verbindung der Funktionskomponenten des Mikrocomputers und der Steckkarte verwendet wird namens Systembus genannt. Der lokale Bus ist ein wichtiges Konzept, das wir in Kapitel 7 besprechen werden.
(3) Interner Bus: Der interne Bus wird auch Systembus oder Board-Level-Bus genannt. Da dieser Bus dazu dient, die Funktionskomponenten des Mikrocomputers zu einem vollständigen Mikrocomputersystem zu verbinden, wie in Abbildung 1.2 dargestellt, wird er als Systembus bezeichnet. Der Systembus ist der wichtigste Bus im Mikrocomputersystem. Was normalerweise als Mikrocomputerbus bezeichnet wird, bezieht sich auf den Systembus, z. B. PC-Bus, AT-Bus (ISA-Bus), PCI-Bus usw. Der Systembus ist einer der Schlüsselpunkte, die wir diskutieren werden.
Die auf dem Systembus übertragenen Informationen umfassen Dateninformationen, Adressinformationen und Steuerinformationen. Daher enthält der Systembus drei Busse mit unterschiedlichen Funktionen, nämlich Datenbus DB (Datenbus), Adressbus AB (Adressbus) und Steuerung Bus CB (Steuerbus), wie in Abbildung 1.2 dargestellt.
Der Datenbus DB wird zur Übertragung von Dateninformationen verwendet. Der Datenbus ist ein bidirektionaler Drei-Zustands-Bus, das heißt, er kann Daten von der CPU an andere Komponenten wie Speicher oder E/A-Schnittstellen übertragen und auch Daten von anderen Komponenten an die CPU übertragen. Die Anzahl der Bits im Datenbus ist ein wichtiger Indikator für einen Mikrocomputer und stimmt normalerweise mit der Wortlänge des Mikroprozessors überein. Beispielsweise beträgt die Wortlänge des Intel 8086-Mikroprozessors 16 Bit und die Breite des Datenbusses beträgt ebenfalls 16 Bit. Es sollte darauf hingewiesen werden, dass die Bedeutung von Daten weit gefasst ist. Dabei kann es sich um reale Daten, Befehlscodes oder Statusinformationen und manchmal sogar um Steuerinformationen handeln. Daher ist das, was auf dem Datenbus übertragen wird, nicht unbedingt einfach Daten im wahrsten Sinne des Wortes.
Der Adressbus AB wird speziell zum Übertragen von Adressen verwendet. Da die Adresse nur von der CPU an den externen Speicher oder E/A-Port übertragen werden kann, ist der Adressbus immer unidirektional und dreistufig, was sich von den Daten unterscheidet Bus. Die Anzahl der Bits im Adressbus bestimmt die Größe des Speicherplatzes, den die CPU direkt adressieren kann. Wenn der Adressbus eines 8-Bit-Mikrocomputers beispielsweise 16 Bit groß ist, beträgt sein maximal adressierbarer Speicherplatz 2 ^ 16 = 64 KB. und der Adressbus eines 16-Bit-Mikrocomputers ist 2^16=64 KB, sein adressierbarer Raum beträgt 2^20=1 MB. Wenn der Adressbus n Bits umfasst, beträgt der adressierbare Raum im Allgemeinen 2 ^ n Bytes.
Der Steuerbus CB dient zur Übertragung von Steuersignalen und Zeitsignalen. Von den Steuersignalen werden einige vom Mikroprozessor an die Speicher- und E/A-Schnittstellenschaltungen gesendet, z. B. Lese-/Schreibsignale, Chipauswahlsignale, Interrupt-Antwortsignale usw., andere werden von anderen Komponenten an die CPU zurückgekoppelt. wie zum Beispiel: Interrupt-Anwendungssignale, Reset-Signal, Busanforderungssignal, begrenztes Bereitschaftssignal usw. Daher wird die Übertragungsrichtung des Steuerbusses durch das spezifische Steuersignal bestimmt, das im Allgemeinen bidirektional ist. Die Anzahl der Bits im Steuerbus richtet sich nach den tatsächlichen Steueranforderungen des Systems. Tatsächlich hängt die spezifische Situation des Steuerbusses hauptsächlich von der CPU ab.
(4) Externer Bus: auch Kommunikationsbus genannt. Es wird für die Verbindung und Kommunikation zwischen zwei Systemen verwendet, beispielsweise für die Kommunikation zwischen zwei Mikrocomputersystemen oder zwischen einem Mikrocomputersystem und anderen elektronischen Instrumenten oder elektronischen Geräten. Zu den häufig verwendeten Kommunikationsbussen gehören der IEEE-488-Bus, der VXI-Bus und der serielle RS-232-Bus. Der externe Bus ist nicht Bestandteil des Mikrocomputersystems selbst, sondern findet sich nur in Mikrocomputer-Anwendungssystemen.
Das obige ist der detaillierte Inhalt vonWie heißen bei einem Mikrocomputer die Recheneinheit und der Controller zusammen?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1378
1378
 52
52

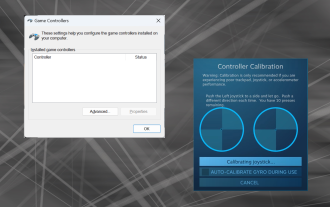 So kalibrieren Sie Ihren Xbox One-Controller richtig unter Windows 11
Sep 21, 2023 pm 09:09 PM
So kalibrieren Sie Ihren Xbox One-Controller richtig unter Windows 11
Sep 21, 2023 pm 09:09 PM
Da Windows zur Gaming-Plattform der Wahl geworden ist, ist es umso wichtiger, seine spielorientierten Funktionen zu identifizieren. Eine davon ist die Möglichkeit, einen Xbox One-Controller unter Windows 11 zu kalibrieren. Mit der integrierten manuellen Kalibrierung können Sie Abweichungen, zufällige Bewegungen oder Leistungsprobleme beseitigen und die X-, Y- und Z-Achse effektiv ausrichten. Wenn die verfügbaren Optionen nicht funktionieren, können Sie jederzeit ein Xbox One-Controller-Kalibrierungstool eines Drittanbieters verwenden. Finden wir es heraus! Wie kalibriere ich meinen Xbox-Controller unter Windows 11? Bevor Sie fortfahren, stellen Sie sicher, dass Sie Ihren Controller an Ihren Computer anschließen und die Treiber Ihres Xbox One-Controllers aktualisieren. Installieren Sie nebenbei auch alle verfügbaren Firmware-Updates. 1. Nutzen Sie Wind
 Wie verwende ich das CodeIgniter4-Framework in PHP?
May 31, 2023 pm 02:51 PM
Wie verwende ich das CodeIgniter4-Framework in PHP?
May 31, 2023 pm 02:51 PM
PHP ist eine sehr beliebte Programmiersprache und CodeIgniter4 ist ein häufig verwendetes PHP-Framework. Bei der Entwicklung von Webanwendungen ist die Verwendung von Frameworks sehr hilfreich. Sie können den Entwicklungsprozess beschleunigen, die Codequalität verbessern und die Wartungskosten senken. In diesem Artikel wird die Verwendung des CodeIgniter4-Frameworks vorgestellt. Installation des CodeIgniter4-Frameworks Das CodeIgniter4-Framework kann von der offiziellen Website (https://codeigniter.com/) heruntergeladen werden. Runter
 Laravel von Grund auf lernen: Detaillierte Erklärung des Controller-Methodenaufrufs
Mar 10, 2024 pm 05:03 PM
Laravel von Grund auf lernen: Detaillierte Erklärung des Controller-Methodenaufrufs
Mar 10, 2024 pm 05:03 PM
Laravel von Grund auf lernen: Detaillierte Erklärung des Controller-Methodenaufrufs Bei der Entwicklung von Laravel ist Controller ein sehr wichtiges Konzept. Der Controller dient als Brücke zwischen dem Modell und der Ansicht und ist für die Verarbeitung von Routenanforderungen und die Rückgabe entsprechender Daten an die Ansicht zur Anzeige verantwortlich. Methoden in Controllern können über Routen aufgerufen werden. In diesem Artikel wird detailliert beschrieben, wie Methoden in Controllern geschrieben und aufgerufen werden, und es werden spezifische Codebeispiele bereitgestellt. Zuerst müssen wir einen Controller erstellen. Sie können zum Erstellen das Artisan-Befehlszeilentool verwenden
 Welche logischen Operationen kann der Operator ausführen?
Aug 26, 2022 am 11:40 AM
Welche logischen Operationen kann der Operator ausführen?
Aug 26, 2022 am 11:40 AM
Die Recheneinheit ist in der Lage, arithmetische und logische Operationen durchzuführen. Die Grundfunktion der Recheneinheit besteht darin, die Verarbeitung verschiedener Daten abzuschließen, wie zum Beispiel die vier arithmetischen Operationen, logische Operationen wie UND, ODER und Negation, arithmetische und logische Schiebeoperationen, Vergleichen von Werten, Ändern von Symbolen, Berechnen von Hauptspeicheradressen , usw. Die Recheneinheit ist eine funktionale Komponente im Computer, die Daten verarbeitet. Die Datenverarbeitung umfasst hauptsächlich arithmetische Operationen an Daten und logische Operationen an logischen Daten. Daher ist die Durchführung arithmetischer und logischer Operationen an Daten die Kernfunktion der Recheneinheit.
 Was ist ein Laravel-Controller?
Jan 14, 2023 am 11:16 AM
Was ist ein Laravel-Controller?
Jan 14, 2023 am 11:16 AM
In Laravel ist ein Controller (Controller) eine Klasse, die zur Implementierung bestimmter Funktionen verwendet wird; der Controller kann zugehörige Anforderungsverarbeitungslogik in einer separaten Klasse kombinieren. Einige Methoden werden im Controller gespeichert, um bestimmte Funktionen zu implementieren. Der Controller wird über Routing aufgerufen, und Rückruffunktionen werden nicht mehr im Verzeichnis „app/Http/Controllers“ gespeichert.
 Zu welcher Computergeneration gehören Computer mit Mikroprozessoren als Kern
Dec 24, 2020 pm 04:26 PM
Zu welcher Computergeneration gehören Computer mit Mikroprozessoren als Kern
Dec 24, 2020 pm 04:26 PM
Mikrocomputer mit Mikroprozessoren als Kern gehören zur 4. Computergeneration. Transistoren sind die Merkmale der Computer der zweiten Generation, integrierte Schaltkreise sind die Merkmale der Computer der dritten Generation, Vakuumröhren sind die Merkmale der Computer der ersten Generation und hochintegrierte Schaltkreise sind die Merkmale der Computer der vierten Generation; bestehend aus einem oder mehreren Eine Zentraleinheit, die aus mehreren hochintegrierten Schaltkreisen besteht.
 Laravel Study Guide: Best Practices für Controller-Methodenaufrufe
Mar 11, 2024 am 08:27 AM
Laravel Study Guide: Best Practices für Controller-Methodenaufrufe
Mar 11, 2024 am 08:27 AM
Im Laravel-Lernleitfaden ist das Aufrufen von Controller-Methoden ein sehr wichtiges Thema. Controller fungieren als Brücke zwischen Routing und Modellen und spielen eine wichtige Rolle in der Anwendung. In diesem Artikel werden die Best Practices für den Aufruf von Controller-Methoden vorgestellt und spezifische Codebeispiele bereitgestellt, um den Lesern das Verständnis zu erleichtern. Lassen Sie uns zunächst die Grundstruktur von Controller-Methoden verstehen. In Laravel werden Controller-Klassen normalerweise im Verzeichnis app/Http/Controllers gespeichert. Jede Controller-Klasse enthält mehrere
 Was sind die Grundkomponenten eines Mikrocomputer-Hardwaresystems?
Dec 25, 2020 pm 02:53 PM
Was sind die Grundkomponenten eines Mikrocomputer-Hardwaresystems?
Dec 25, 2020 pm 02:53 PM
Zu den Grundkomponenten eines Mikrocomputer-Hardwaresystems gehören CPU, Speicher, Eingabegeräte und Ausgabegeräte. Das Mikrocomputer-Hardwaresystem enthält fünf wichtige Komponenten: Recheneinheit, Controller, Speicher, Eingabegerät und Ausgabegerät. Controller und Recheneinheit bilden zusammen die Zentraleinheit (CPU). Die Hauptfunktion der Recheneinheit besteht darin, Daten und Informationen zu berechnen und zu verarbeiten. Der Controller kann als Gehirn und Befehlszentrale des Computers angesehen werden. Er ermöglicht es den verschiedenen Komponenten des Computers, Anweisungen durch Integration und Analyse geordnet auszuführen relevante Daten und Informationen.