

Was bedeutet präemptiver Prioritätsplanungsalgorithmus?

Das System weist den Prozessor dem Prozess mit der höchsten Ausführungspriorität zu. Solange jedoch während seiner Ausführung ein anderer Prozess mit höherer Priorität auftritt, stoppt der Prozessplaner sofort die Ausführung des aktuellen Prozesses (des ursprünglichen Prozesses mit der höchsten Priorität) und weist den Prozessor dem neu angekommenen Prozess mit der höchsten Priorität zu .
Die Betriebsumgebung dieses Tutorials: Windows 7-System, C++17-Version, Dell G3-Computer.
Preemptiver Prioritätsplanungsalgorithmus
Auf diese Weise weist das System den Prozessor dem Prozess mit der höchsten Priorität für die Ausführung zu. Solange jedoch während seiner Ausführung ein anderer Prozess mit höherer Priorität auftritt, stoppt der Prozessplaner sofort die Ausführung des aktuellen Prozesses (des ursprünglichen Prozesses mit der höchsten Priorität) und weist den Prozessor dem neu angekommenen Prozess mit der höchsten Priorität zu . Daher wird bei Verwendung dieses Planungsalgorithmus jedes Mal, wenn ein neuer bereiter Prozess i im System erscheint, seine Priorität Pi mit der Priorität Pj des ausführenden Prozesses j verglichen. Wenn Pi ≤ Pj, wird der ursprüngliche Prozess Pj weiter ausgeführt. Wenn jedoch Pi > Pj, wird die Ausführung von Pj sofort gestoppt und ein Prozesswechsel durchgeführt, um Prozess i in die Ausführung zu bringen. Offensichtlich kann dieser präventive Prioritätsplanungsalgorithmus die Anforderungen dringender Aufgaben besser erfüllen und wird daher häufig in Echtzeitsystemen mit strengeren Anforderungen sowie in Stapelverarbeitungs- und Time-Sharing-Systemen mit höheren Leistungsanforderungen verwendet.
Spezifischer Code:
#include <iostream>#include <string>#include <vector>using namespace std;using std::cout;struct PCB
{ // 进程名
string name; // 到达时间
int arrivetime; // 运行时间
int runtime;
// 仍需运行时间
int resttime; // 开始时间
int starttime; // 完成时间
int endtime; // 运行次数
int runcount; // 周转时间
int zhouzhuangtime; // 带权周转时间(周转时间/运行时间)
double weightzhouzhuangtime; // 优先级(静态)
int priority;
PCB *next;
};// 进程数int num_process;// 记录所有进程的总时间int totaltime;// 记录所有进程的总带权周转时间double weighttotaltime;
PCB *createPCB()
{ int i; // 定义队首、队尾
PCB *head, *rear; // 初始化
head = rear = NULL; // 临时指针变量
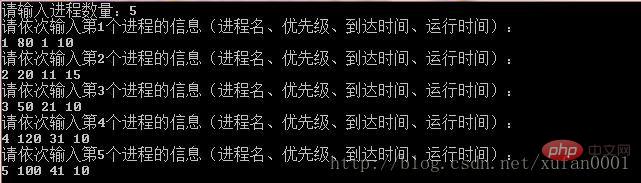
PCB *p; cout<<"请输入进程数量:"; cin>>num_process; for(i = 0; i < num_process; i++)
{ // 初始化一个空间给进程
p = new PCB; cout<<"请依次输入第"<<i+1<<"个进程的信息(进程名、优先级、到达时间、运行时间):"<<endl; cin>>p->name>>p->priority>>p->arrivetime>>p->runtime;
p->resttime = p->runtime;
p->runcount = 1;
totaltime += p->runtime;
p->starttime = 0;
p->endtime = 0;
p->zhouzhuangtime = 0;
p->weightzhouzhuangtime = 0;
p->next = NULL; // 存入链表中
if(rear == NULL)
{
head = p;
rear = p;
} else
{
rear->next = p;
rear = p;
}
} return head;
}// 链表插入排序PCB *insertSort(PCB *head)
{ /*
1、先在原链表中以第一个节点为一个有序链表,其余节点为待定节点;
2、从待定节点中取节点,插入到有序链表中相应位置;
3、实际上只有一条链表,在排序中,实际只增加了一个用于指向剩下需要排序节点的头指针。
*/
PCB *first;// 为原链表剩下用于直接插入排序的节点头指针
PCB *t; // 临时指针变量:要插入的节点
PCB *p; // 临时指针变量:要插入的位置
PCB *q; // 临时指针变量:指向原链表
first = head->next;
head->next = NULL; // 只含有一个节点的链表的有序链表
while(first != NULL) // 遍历剩下的无序链表
{ // 无序节点在有序链表中找插入位置p
for(t = first, q = head; (q != NULL) && (q->arrivetime < t->arrivetime); p = q, q = q->next); // 无序链表中的节点离开,以便插入到有序链表中
first = first->next; if(q == head)// 插入在第一个节点之前
{
head = t;
} else// p是q的前驱
{
p->next = t;
}
t->next = q;// 完成插入动作
} return head;
}// 获取当前时间段内的进程数量int getCurrentNumOfProcess(PCB *head, int time)
{ int count = 0;
PCB *t;// 临时指针变量,指向链表
t = head; while(t != NULL && t->arrivetime <= time)
{
count++;
t = t->next;
} return count;
}// 删除当前节点PCB* deletePCB(PCB *head, PCB *t)
{
PCB *p, *q;
p = head;
q = p->next; // 删除节点是头节点
if(t == head)
{
head = head->next;
} else
{ while(q != t)// 跳出循环之后q为该节点,p为前一节点
{
p = p->next;
q = p->next;
} if(t->next == NULL)// 删除节点是尾节点
p->next = NULL; else
p->next = q->next;
} // 删除
free(t); return head;
}// 在头节点后的count个节点中选择优先数最大的返回PCB *findMaxPriority(PCB *head, int count)
{ int max;
PCB *p, *q, *f;
q = head;
max = q->priority;
f = q; while(count > 0)
{ if(q->priority > max)
{
max = q->priority;
f = q;
}
count--;
q =q->next;
} return f;
}/*
输出a时间内的特定输出格式,当某一时间段内没有进程工作时,进程名称为0
进程名称.进程工作时间,进程与进程间以|分隔
输入:1 3 2 8
2 2 1 7
3 6 3 12
输出:[0.1|2.1|1.1|3.12|1.7|2.6|0.172]
*/void print(vector<PCB> vec_output, int a)
{ for(int i = 0; i < vec_output.size(); i++)
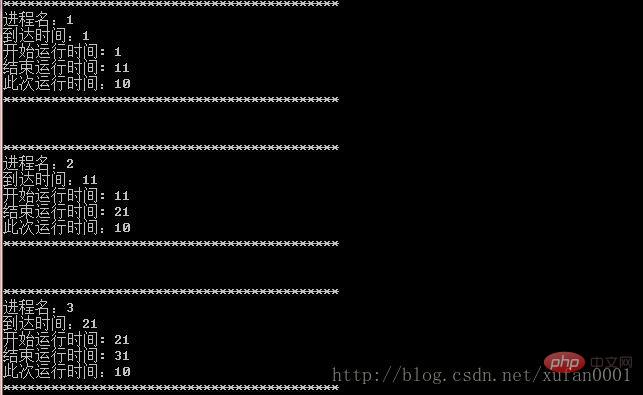
{ cout<<"******************************************"<<endl; cout<<"进程名:"<<vec_output[i].name<<endl; cout<<"到达时间:"<<vec_output[i].arrivetime<<endl; cout<<"开始运行时间: "<<vec_output[i].starttime<<endl; cout<<"结束运行时间: "<<vec_output[i].endtime<<endl; cout<<"此次运行时间:"<<vec_output[i].endtime - vec_output[i].starttime<<endl; cout<<"******************************************"<<endl; cout<<endl; cout<<endl;
} // 输出周转时间信息,只有进程结束了才输出
int i; for(i = 0; i < vec_output.size()-1; i++)
{ bool flag = true; for(int j = i+1; j < vec_output.size(); j++)
{ if(vec_output[j].name == vec_output[i].name)
{
flag = false; break;
}
} if(flag)
{ cout<<"进程"<<vec_output[i].name<<"的周转时间为:"<<vec_output[i].zhouzhuangtime<<endl; cout<<"进程"<<vec_output[i].name<<"的带权周转时间为: "<<vec_output[i].weightzhouzhuangtime<<endl; cout<<endl; cout<<endl;
}
} cout<<"进程"<<vec_output[i].name<<"的周转时间为:"<<vec_output[i].zhouzhuangtime<<endl; cout<<"进程"<<vec_output[i].name<<"的带权周转时间为: "<<vec_output[i].weightzhouzhuangtime<<endl; cout<<endl; cout<<endl; // 输出平均周转时间信息
cout<<"平均周转时间:"<<totaltime/(double)num_process<<endl; cout<<"平均带权周转时间:"<<weighttotaltime/(double)num_process<<endl; cout<<endl; cout<<endl; cout<<a<<"个时间单位内的执行顺序为:"<<endl; cout<<"["; if(vec_output[0].starttime > 0)
{ cout<<"0."<<vec_output[0].starttime<<"|";
} if(vec_output[vec_output.size() - 1].endtime < a)
{ for(int i = 0; i < vec_output.size(); i++)
{ cout<<vec_output[i].name<<"."<<vec_output[i].endtime - vec_output[i].starttime<<"|"; // 补全从开始到结束之间没有进程运行项
if(i+1 < vec_output.size() && vec_output[i].endtime != vec_output[i+1].starttime)
{ cout<<"0."<<vec_output[i+1].starttime - vec_output[i].endtime<<"|";
}
} cout<<"0."<<a-vec_output[vec_output.size()-1].endtime<<"]"<<endl;
} else if(vec_output[vec_output.size() - 1].endtime == a)
{ for(int i = 0; i < vec_output.size()-1; i++)
{ cout<<vec_output[i].name<<"."<<vec_output[i].endtime - vec_output[i].starttime<<"|"; // 补全从开始到结束之间没有进程运行项
if(i+1 < vec_output.size() && vec_output[i].endtime != vec_output[i+1].starttime)
{ cout<<"0."<<vec_output[i+1].starttime - vec_output[i].endtime<<"|";
}
} cout<<vec_output[vec_output.size()-1].name<<"."<<vec_output[vec_output.size()-1].endtime - vec_output[vec_output.size()-1].starttime<<"]"<<endl;
} else
{ for(int i = 0; i < vec_output.size(); i++)
{ if(vec_output[i].endtime <= a)
{ cout<<vec_output[i].name<<"."<<vec_output[i].endtime - vec_output[i].starttime<<"|"; // 补全从开始到结束之间没有进程运行项
if(i+1 < vec_output.size() && vec_output[i].endtime != vec_output[i+1].starttime)
{ cout<<"0."<<vec_output[i+1].starttime - vec_output[i].endtime<<"|";
}
} else
{ cout<<vec_output[i].name<<"."<<a - vec_output[i].starttime<<"]"<<endl; return;
}
}
}
}void PCB_MAIN(PCB *head)
{
head = insertSort(head); int time = 0;// 模拟时间变量
int count;// 当前时间内运行的进程数量
PCB *q; vector<PCB> vec_out;//输出
PCB temp; while(head != NULL)
{
count = getCurrentNumOfProcess(head, time); if(count == 0)
time++; else
{ /************************************************************************/
/* 抢占式 */
/************************************************************************/
// 找出优先数最大的线程
q = findMaxPriority(head, count); if(q->runcount == 1)// 该进程第一次运行
{
q->starttime = time; // 输出信息
temp = *q;
temp.endtime = 0;
temp.next = NULL; if(vec_out.size() != 0 && vec_out[vec_out.size()-1].endtime == 0)
{
vec_out[vec_out.size()-1].endtime = temp.starttime;
}
vec_out.push_back(temp);
}
++time;
++q->runcount;
--q->resttime; if(q->resttime == 0)// 该进程运行结束
{ // 记录结束时间
q->endtime = time; // 计算周转时间
q->zhouzhuangtime = time - q->arrivetime; // 计算带权周转时间
q->weightzhouzhuangtime = q->zhouzhuangtime/(double)q->runtime;
weighttotaltime += q->weightzhouzhuangtime; // 输出信息
temp = *q;
temp.starttime = 0;
temp.next = NULL; if(vec_out[vec_out.size()-1].name == temp.name)
{
vec_out[vec_out.size()-1].endtime = temp.endtime;
vec_out[vec_out.size()-1].zhouzhuangtime = temp.zhouzhuangtime;
vec_out[vec_out.size()-1].weightzhouzhuangtime = temp.weightzhouzhuangtime;
} else
{
temp.starttime = vec_out[vec_out.size()-1].endtime;
vec_out.push_back(temp);
} // 删除该进程
//deletePCB(q);
head = deletePCB(head, q);
}
}
} // 输出200时间单位内的执行顺序
print(vec_out, 200);
}int main()
{
PCB *head = NULL;
head = createPCB();
PCB_MAIN(head); return 0;
}Ausgabebeispiel
Eingabe:
Ausgabe:


Empfohlenes Tutorial: „C #"
Das obige ist der detaillierte Inhalt vonWas bedeutet präemptiver Prioritätsplanungsalgorithmus?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1385
1385
 52
52

 Wie man mit Sonderfiguren in der C -Sprache umgeht
Apr 03, 2025 pm 03:18 PM
Wie man mit Sonderfiguren in der C -Sprache umgeht
Apr 03, 2025 pm 03:18 PM
In der C -Sprache werden Sonderzeichen durch Escape -Sequenzen verarbeitet, wie z. B.: \ n repräsentiert Linienbrüche. \ t bedeutet tab charakter. Verwenden Sie Escape -Sequenzen oder Zeichenkonstanten, um Sonderzeichen darzustellen, wie z. B. char c = '\ n'. Beachten Sie, dass der Backslash zweimal entkommen muss. Verschiedene Plattformen und Compiler haben möglicherweise unterschiedliche Fluchtsequenzen. Bitte wenden Sie sich an die Dokumentation.
 Was ist die Rolle von CHAR in C -Saiten?
Apr 03, 2025 pm 03:15 PM
Was ist die Rolle von CHAR in C -Saiten?
Apr 03, 2025 pm 03:15 PM
In C wird der Zeichenentyp in Saiten verwendet: 1. Speichern Sie ein einzelnes Zeichen; 2. Verwenden Sie ein Array, um eine Zeichenfolge darzustellen und mit einem Null -Terminator zu enden. 3. Durch eine Saitenbetriebsfunktion arbeiten; 4. Lesen oder geben Sie eine Zeichenfolge von der Tastatur aus.
 Der Unterschied zwischen char und wchar_t in der C -Sprache
Apr 03, 2025 pm 03:09 PM
Der Unterschied zwischen char und wchar_t in der C -Sprache
Apr 03, 2025 pm 03:09 PM
In der C -Sprache ist der Hauptunterschied zwischen char und wchar_t die Zeichencodierung: char verwendet ASCII oder erweitert ASCII, wchar_t Unicode; char nimmt 1-2 Bytes auf, wchar_t nimmt 2-4 Bytes auf; char ist für englischen Text geeignet. Wchar_t ist für mehrsprachige Text geeignet. char ist weithin unterstützt, wchar_t hängt davon ab, ob der Compiler und das Betriebssystem Unicode unterstützen. char ist in der Charakterbereich begrenzt, WCHAR_T hat einen größeren Charakterbereich und spezielle Funktionen werden für arithmetische Operationen verwendet.
 Wie man verschiedene Symbole in der C -Sprache verwendet
Apr 03, 2025 pm 04:48 PM
Wie man verschiedene Symbole in der C -Sprache verwendet
Apr 03, 2025 pm 04:48 PM
Die Nutzungsmethoden von Symbolen in der C-Sprachabdeckung Arithmetik, Zuordnung, Bedingungen, Logik, Bitoperatoren usw. werden für grundlegende mathematische Operationen verwendet, Zuordnungsoperatoren werden zur Zuordnung und Addition verwendet, Subtraktion, Multiplikationszuordnung und Abteilungszuweisung, Zustandsbetreiber werden für Unterschiede verwendet. Logische Operationen werden verwendet. Logische Operationen werden verwendet. Logische Operationen werden verwendet. Zeiger, Markierungen am Ende der Datei und nicht numerische Werte.
 Der Unterschied zwischen Multithreading und asynchronem C#
Apr 03, 2025 pm 02:57 PM
Der Unterschied zwischen Multithreading und asynchronem C#
Apr 03, 2025 pm 02:57 PM
Der Unterschied zwischen Multithreading und Asynchron besteht darin, dass Multithreading gleichzeitig mehrere Threads ausführt, während asynchron Operationen ausführt, ohne den aktuellen Thread zu blockieren. Multithreading wird für rechenintensive Aufgaben verwendet, während asynchron für die Benutzerinteraktion verwendet wird. Der Vorteil des Multi-Threading besteht darin, die Rechenleistung zu verbessern, während der Vorteil von Asynchron nicht darin besteht, UI-Threads zu blockieren. Die Auswahl von Multithreading oder Asynchron ist von der Art der Aufgabe abhängt: Berechnungsintensive Aufgaben verwenden Multithreading, Aufgaben, die mit externen Ressourcen interagieren und die UI-Reaktionsfähigkeit asynchron verwenden müssen.
 Wie man CHO in C -Sprache umwandelt
Apr 03, 2025 pm 03:21 PM
Wie man CHO in C -Sprache umwandelt
Apr 03, 2025 pm 03:21 PM
In der C -Sprache kann die char -Typ -Konvertierung direkt in einen anderen Typ konvertiert werden, wenn: Casting: Verwenden von Casting -Zeichen. Automatische Konvertierung des Typs: Wenn ein Datentyp einen anderen Werttyp berücksichtigen kann, wandelt der Compiler diese automatisch um.
 So verwenden Sie char Array in C -Sprache
Apr 03, 2025 pm 03:24 PM
So verwenden Sie char Array in C -Sprache
Apr 03, 2025 pm 03:24 PM
Das Char -Array speichert Zeichensequenzen in der C -Sprache und wird als char Array_name [Größe] deklariert. Das Zugriffselement wird durch den Einweisoperator weitergeleitet, und das Element endet mit dem Null -Terminator '\ 0', der den Endpunkt der Zeichenfolge darstellt. Die C -Sprache bietet eine Vielzahl von String -Manipulationsfunktionen wie Strlen (), Strcpy (), Strcat () und strcmp ().
 Was ist die Funktion der C -Sprachsumme?
Apr 03, 2025 pm 02:21 PM
Was ist die Funktion der C -Sprachsumme?
Apr 03, 2025 pm 02:21 PM
Es gibt keine integrierte Summenfunktion in der C-Sprache, daher muss sie selbst geschrieben werden. Die Summe kann erreicht werden, indem das Array durchquert und Elemente akkumulieren: Schleifenversion: Die Summe wird für die Schleifen- und Arraylänge berechnet. Zeigerversion: Verwenden Sie Zeiger, um auf Array-Elemente zu verweisen, und eine effiziente Summierung wird durch Selbststillstandszeiger erzielt. Dynamisch Array -Array -Version zuweisen: Zuordnen Sie Arrays dynamisch und verwalten Sie selbst den Speicher selbst, um sicherzustellen, dass der zugewiesene Speicher befreit wird, um Speicherlecks zu verhindern.
