
 Technologie-Peripheriegeräte
KI
Metaforscher erschaffen einen künstlichen visuellen Kortex, der es Robotern ermöglicht, visuell zu operieren
Technologie-Peripheriegeräte
KI
Metaforscher erschaffen einen künstlichen visuellen Kortex, der es Robotern ermöglicht, visuell zu operieren
Metaforscher erschaffen einen künstlichen visuellen Kortex, der es Robotern ermöglicht, visuell zu operieren

Forscher der KI-Forschungsabteilung von Meta haben kürzlich eine Ankündigung veröffentlicht, in der sie wichtige Fortschritte bei der Koordination adaptiver Fähigkeiten von Robotern und der Replikation des visuellen Kortex ankündigen. Sie sagen, dass diese Fortschritte es KI-betriebenen Robotern ermöglichen, in der realen Welt durch Vision zu agieren, ohne dass Daten aus der realen Welt erfasst werden müssen.
Sie behaupten, dies sei ein großer Fortschritt bei der Entwicklung universell einsetzbarer „Embodied AI“-Roboter, die ohne menschliches Eingreifen mit der realen Welt interagieren können. Die Forscher sagten auch, dass sie einen künstlichen visuellen Kortex namens „VC-1“ geschaffen hätten, der auf dem Ego4D-Datensatz trainiert wurde, der die täglichen Aktivitäten von Tausenden von Forschungsteilnehmern auf der ganzen Welt aufzeichnet.
Wie die Forscher in einem zuvor veröffentlichten Blogbeitrag erklärten, ist der visuelle Kortex der Bereich des Gehirns, der es Organismen ermöglicht, Sehen in Bewegung umzuwandeln. Daher ist ein künstlicher visueller Kortex eine wichtige Voraussetzung für jeden Roboter, der Aufgaben basierend auf der Szene vor ihm ausführen muss.
Da der künstliche visuelle Kortex von „VC-1“ benötigt wird, um eine Reihe unterschiedlicher sensomotorischer Aufgaben in unterschiedlichen Umgebungen gut auszuführen, spielt der Ego4D-Datensatz eine besonders wichtige Rolle, da er die Daten enthält, die die Studienteilnehmer durch die Kameras tragen Stundenlanges Video von täglichen Aktivitäten wie Kochen, Putzen, Sport treiben, Basteln und mehr.
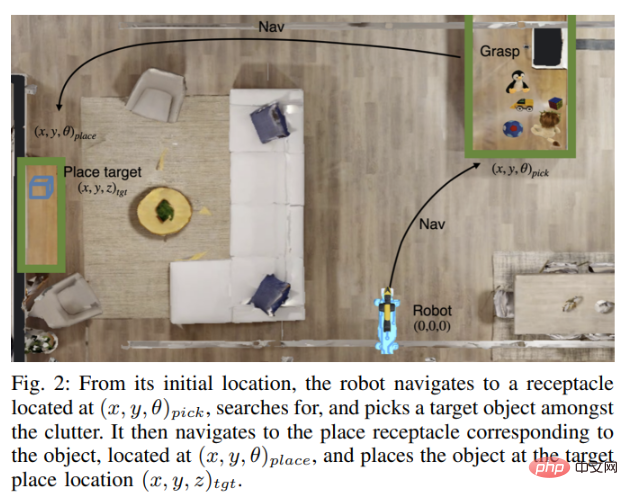
Die Forscher sagten: „Biologische Organismen verfügen über einen universellen visuellen Kortex, der das Repräsentationsmittel ist, nach dem wir suchen. Deshalb haben wir uns zum Ziel gesetzt, einen Datensatz zu erstellen, der bei mehreren Aufgaben gut funktioniert, wobei wir Ego4D als Kerndatensatz verwenden und verbessern.“ VC-1 durch das Hinzufügen zusätzlicher Datensätze. Da sich Ego4D hauptsächlich auf alltägliche Aktivitäten wie Kochen, Gartenarbeit und Basteln konzentriert, haben wir auch einen Datensatz mit egozentrischen Videos zur Erkundung von Häusern und Wohnungen übernommen „verkörperte KI.“ Damit Roboter in der realen Welt völlig autonom arbeiten können, müssen sie auch in der Lage sein, reale Objekte zu manipulieren. Der Roboter benötigt Sehkraft, um zu navigieren, ein Objekt zu finden und zu tragen, es an einen anderen Ort zu bewegen und es dann richtig zu platzieren – alles Aktionen, die er autonom auf der Grundlage dessen ausführt, was er sieht und hört.
Um dieses Problem zu lösen, haben die KI-Experten von Meta mit Forschern des Georgia Institute of Technology zusammengearbeitet, um eine neue Technologie namens Adaptive Skill Coordination (ASC) zu entwickeln, mit der Roboter diese Fähigkeiten simulieren und dann trainieren. Diese Fähigkeiten werden in realen Robotern nachgebildet.
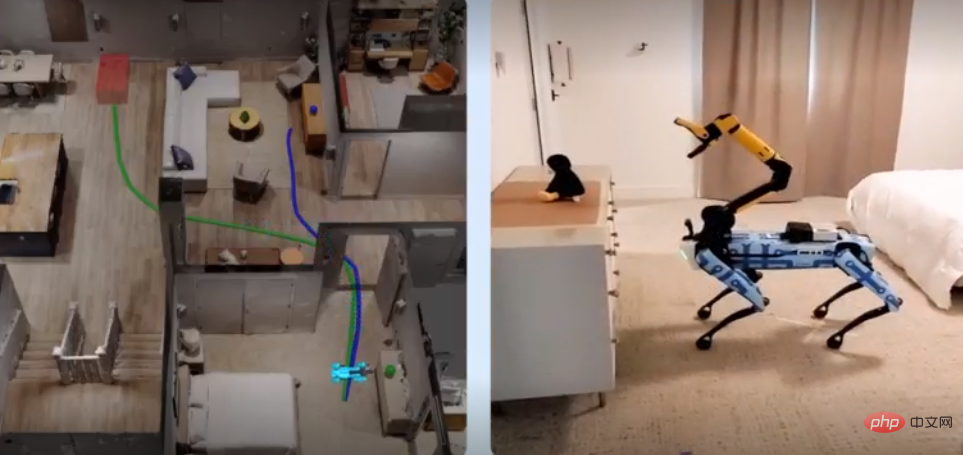
Meta arbeitete auch mit Boston Dynamics zusammen, um die Wirksamkeit seiner ASC-Technologie zu demonstrieren. Die beiden Unternehmen kombinierten die ASC-Technologie mit dem Spot-Roboter von Boston Dynamics, um dem Roboter leistungsstarke Erfassungs-, Navigations- und Manipulationsfähigkeiten zu verleihen, obwohl dafür auch ein erheblicher menschlicher Eingriff erforderlich ist. Um beispielsweise ein Objekt auszuwählen, muss jemand auf das Objekt klicken, das auf dem Tablet des Roboters angezeigt wird.
Die Forscher schrieben in dem Artikel: „Unser Ziel ist es, ein KI-Modell zu entwickeln, das die Welt anhand der integrierten Sensorik und motorischen Befehle über die Boston Dynamics API wahrnehmen kann.“
Der Spot-Roboter wurde mit dem Habitat-Simulator getestet, den The Die Simulationsumgebung wurde unter Verwendung von HM3D- und ReplicaCAD-Datensätzen erstellt, die 3D-Scandaten für den Innenbereich von mehr als 1.000 Häusern enthalten. Der Spot-Roboter wurde dann darauf trainiert, sich durch ein Haus zu bewegen, das er zuvor noch nicht gesehen hatte, Gegenstände zu tragen und sie an geeigneten Orten zu platzieren. Das von den trainierten Spot-Robotern gewonnene Wissen und die Informationen werden dann auf Spot-Roboter übertragen, die in der realen Welt arbeiten und die automatisch dieselben Aufgaben ausführen, basierend auf ihrem Wissen über den Grundriss des Hauses.
 Die Forscher schrieben: „Wir haben den Spot-Roboter in zwei sehr unterschiedlichen realen Umgebungen getestet, einer 185 Quadratmeter großen, voll möblierten Wohnung und einem 65 Quadratmeter großen Universitätslabor. Insgesamt hat der Spot-Roboter mit ASC-Technologie nahezu fehlerfrei funktioniert und 59 Mal von 60 Tests bestanden, wobei er Hardware-Instabilität, Aufnahmefehler und gegnerische Störungen wie sich bewegende Hindernisse oder blockierende Wege überwand dass sie auch den Quellcode des VC-1-Modells geöffnet und in einem anderen Artikel Einzelheiten zur Skalierung der Modellgröße, der Datensatzgröße usw. mitgeteilt haben. In der Zwischenzeit wird der nächste Schwerpunkt des Teams auf der Integration von VC-1 mit ASC liegen, um ein menschlicheres repräsentatives KI-System zu schaffen.
Die Forscher schrieben: „Wir haben den Spot-Roboter in zwei sehr unterschiedlichen realen Umgebungen getestet, einer 185 Quadratmeter großen, voll möblierten Wohnung und einem 65 Quadratmeter großen Universitätslabor. Insgesamt hat der Spot-Roboter mit ASC-Technologie nahezu fehlerfrei funktioniert und 59 Mal von 60 Tests bestanden, wobei er Hardware-Instabilität, Aufnahmefehler und gegnerische Störungen wie sich bewegende Hindernisse oder blockierende Wege überwand dass sie auch den Quellcode des VC-1-Modells geöffnet und in einem anderen Artikel Einzelheiten zur Skalierung der Modellgröße, der Datensatzgröße usw. mitgeteilt haben. In der Zwischenzeit wird der nächste Schwerpunkt des Teams auf der Integration von VC-1 mit ASC liegen, um ein menschlicheres repräsentatives KI-System zu schaffen.
Das obige ist der detaillierte Inhalt vonMetaforscher erschaffen einen künstlichen visuellen Kortex, der es Robotern ermöglicht, visuell zu operieren. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 Verstehen von Säureeigenschaften: Die Säulen einer zuverlässigen Datenbank
Apr 08, 2025 pm 06:33 PM
Verstehen von Säureeigenschaften: Die Säulen einer zuverlässigen Datenbank
Apr 08, 2025 pm 06:33 PM
Detaillierte Erläuterung von Datenbanksäureattributen Säureattribute sind eine Reihe von Regeln, um die Zuverlässigkeit und Konsistenz von Datenbanktransaktionen sicherzustellen. Sie definieren, wie Datenbanksysteme Transaktionen umgehen, und sorgen dafür, dass die Datenintegrität und -genauigkeit auch im Falle von Systemabstürzen, Leistungsunterbrechungen oder mehreren Benutzern gleichzeitiger Zugriff. Säureattributübersicht Atomizität: Eine Transaktion wird als unteilbare Einheit angesehen. Jeder Teil schlägt fehl, die gesamte Transaktion wird zurückgerollt und die Datenbank behält keine Änderungen bei. Wenn beispielsweise eine Banküberweisung von einem Konto abgezogen wird, jedoch nicht auf ein anderes erhöht wird, wird der gesamte Betrieb widerrufen. begintransaktion; updateAccountsSetBalance = Balance-100WH
 Kann MySQL JSON zurückgeben?
Apr 08, 2025 pm 03:09 PM
Kann MySQL JSON zurückgeben?
Apr 08, 2025 pm 03:09 PM
MySQL kann JSON -Daten zurückgeben. Die JSON_EXTRACT -Funktion extrahiert Feldwerte. Über komplexe Abfragen sollten Sie die Where -Klausel verwenden, um JSON -Daten zu filtern, aber auf die Leistungsauswirkungen achten. Die Unterstützung von MySQL für JSON nimmt ständig zu, und es wird empfohlen, auf die neuesten Versionen und Funktionen zu achten.
 Master SQL Limit -Klausel: Steuern Sie die Anzahl der Zeilen in einer Abfrage
Apr 08, 2025 pm 07:00 PM
Master SQL Limit -Klausel: Steuern Sie die Anzahl der Zeilen in einer Abfrage
Apr 08, 2025 pm 07:00 PM
SQllimit -Klausel: Steuern Sie die Anzahl der Zeilen in Abfrageergebnissen. Die Grenzklausel in SQL wird verwendet, um die Anzahl der von der Abfrage zurückgegebenen Zeilen zu begrenzen. Dies ist sehr nützlich, wenn große Datensätze, paginierte Anzeigen und Testdaten verarbeitet werden und die Abfrageeffizienz effektiv verbessern können. Grundlegende Syntax der Syntax: SelectColumn1, Spalte2, ... Fromtable_Namelimitnumber_of_rows; number_of_rows: Geben Sie die Anzahl der zurückgegebenen Zeilen an. Syntax mit Offset: SelectColumn1, Spalte2, ... Fromtable_NamelimitOffset, Number_of_rows; Offset: Skip überspringen
 Wie optimieren Sie die MySQL-Leistung für Hochlastanwendungen?
Apr 08, 2025 pm 06:03 PM
Wie optimieren Sie die MySQL-Leistung für Hochlastanwendungen?
Apr 08, 2025 pm 06:03 PM
Die MySQL-Datenbankleistung Optimierungshandbuch In ressourcenintensiven Anwendungen spielt die MySQL-Datenbank eine entscheidende Rolle und ist für die Verwaltung massiver Transaktionen verantwortlich. Mit der Erweiterung der Anwendung werden jedoch die Datenbankleistung Engpässe häufig zu einer Einschränkung. In diesem Artikel werden eine Reihe effektiver Strategien zur Leistungsoptimierung von MySQL -Leistung untersucht, um sicherzustellen, dass Ihre Anwendung unter hohen Lasten effizient und reaktionsschnell bleibt. Wir werden tatsächliche Fälle kombinieren, um eingehende Schlüsseltechnologien wie Indexierung, Abfrageoptimierung, Datenbankdesign und Caching zu erklären. 1. Das Design der Datenbankarchitektur und die optimierte Datenbankarchitektur sind der Eckpfeiler der MySQL -Leistungsoptimierung. Hier sind einige Kernprinzipien: Die Auswahl des richtigen Datentyps und die Auswahl des kleinsten Datentyps, der den Anforderungen entspricht, kann nicht nur Speicherplatz speichern, sondern auch die Datenverarbeitungsgeschwindigkeit verbessern.
 Überwachen Sie MySQL und Mariadb -Tröpfchen mit Prometheus Mysql Exporteur
Apr 08, 2025 pm 02:42 PM
Überwachen Sie MySQL und Mariadb -Tröpfchen mit Prometheus Mysql Exporteur
Apr 08, 2025 pm 02:42 PM
Eine effektive Überwachung von MySQL- und MariADB -Datenbanken ist entscheidend für die Aufrechterhaltung einer optimalen Leistung, die Identifizierung potenzieller Engpässe und die Gewährleistung der Zuverlässigkeit des Gesamtsystems. Prometheus MySQL Exporteur ist ein leistungsstarkes Tool, das detaillierte Einblicke in Datenbankmetriken bietet, die für die proaktive Verwaltung und Fehlerbehebung von entscheidender Bedeutung sind.
 Der Hauptschlüssel von MySQL kann null sein
Apr 08, 2025 pm 03:03 PM
Der Hauptschlüssel von MySQL kann null sein
Apr 08, 2025 pm 03:03 PM
Der MySQL -Primärschlüssel kann nicht leer sein, da der Primärschlüssel ein Schlüsselattribut ist, das jede Zeile in der Datenbank eindeutig identifiziert. Wenn der Primärschlüssel leer sein kann, kann der Datensatz nicht eindeutig identifiziert werden, was zu Datenverwirrung führt. Wenn Sie selbstsinkrementelle Ganzzahlsspalten oder UUIDs als Primärschlüssel verwenden, sollten Sie Faktoren wie Effizienz und Raumbelegung berücksichtigen und eine geeignete Lösung auswählen.
 Navicat -Methode zum Anzeigen von MongoDB -Datenbankkennwort
Apr 08, 2025 pm 09:39 PM
Navicat -Methode zum Anzeigen von MongoDB -Datenbankkennwort
Apr 08, 2025 pm 09:39 PM
Es ist unmöglich, das MongoDB -Passwort direkt über Navicat anzuzeigen, da es als Hash -Werte gespeichert ist. So rufen Sie verlorene Passwörter ab: 1. Passwörter zurücksetzen; 2. Überprüfen Sie die Konfigurationsdateien (können Hash -Werte enthalten). 3. Überprüfen Sie Codes (May Hardcode -Passwörter).
 Beherrschen Sie die Reihenfolge nach Klausel in SQL: Daten effektiv sortieren
Apr 08, 2025 pm 07:03 PM
Beherrschen Sie die Reihenfolge nach Klausel in SQL: Daten effektiv sortieren
Apr 08, 2025 pm 07:03 PM
Detaillierte Erläuterung der SQLORDSBY -Klausel: Die effiziente Sortierung der Datenreihenfolge -Klausel ist eine Schlüsselanweisung in SQL, die zur Sortierung von Abfrageergebnissen verwendet wird. Es kann in einzelnen Spalten oder mehreren Spalten in den Aufstieg (ASC) oder absteigender Reihenfolge (Desc) angeordnet werden, wodurch die Datenlesbarkeit und die Effizienz der Datenverwaltung erheblich verbessert werden. OrderBy syntax SelectColumn1, Spalte2, ... fromTable_NameOrDByColumn_Name [ASC | Desc]; Column_Name: Sortieren nach Spalte. ASC: Ascending Order Sort (Standard). Desc: Sortieren Sie in absteigender Reihenfolge. OrderBy Hauptmerkmale: Multi-Sortier-Sortierung: Unterstützt mehrere Spaltensortierungen, und die Reihenfolge der Spalten bestimmt die Priorität der Sortierung. seit
