
 Technologie-Peripheriegeräte
KI
Physisches Deep Learning mit biologisch inspirierten Trainingsmethoden: Ein Gradienten-freier Ansatz für physische Hardware
Technologie-Peripheriegeräte
KI
Physisches Deep Learning mit biologisch inspirierten Trainingsmethoden: Ein Gradienten-freier Ansatz für physische Hardware
Physisches Deep Learning mit biologisch inspirierten Trainingsmethoden: Ein Gradienten-freier Ansatz für physische Hardware

Die wachsende Nachfrage nach künstlicher Intelligenz hat die Forschung zu unkonventionellem Computing auf Basis physischer Geräte vorangetrieben. Während solche Computergeräte die vom Gehirn inspirierte analoge Informationsverarbeitung nachahmen, stützt sich der Lernprozess immer noch auf Methoden, die für die numerische Verarbeitung optimiert sind, wie z. B. Backpropagation, die für die physische Implementierung nicht geeignet sind.
Hier demonstriert ein Forscherteam der japanischen NTT Device Technology Labs und der Universität Tokio die Physik, indem es einen biologisch inspirierten Trainingsalgorithmus namens Direct Feedback Alignment (DFA) Deep Learning erweitert. Anders als der ursprüngliche Algorithmus basiert die vorgeschlagene Methode auf Zufallsprojektionen mit alternativen nichtlinearen Aktivierungen. Daher können physikalische neuronale Netze ohne Kenntnis des physikalischen Systems und seiner Gradienten trainiert werden. Darüber hinaus kann die Berechnung dieses Trainings auf skalierbarer physischer Hardware simuliert werden.
Forscher demonstrierten den Proof-of-Concept mithilfe eines optoelektronischen rekurrenten neuronalen Netzwerks namens Deep Reservoir Computer. Das Potenzial für beschleunigtes Rechnen mit wettbewerbsfähiger Leistung bei Benchmarks wird demonstriert. Die Ergebnisse liefern praktische Lösungen für das Training und die Beschleunigung des neuromorphen Rechnens.
Die Forschung trug den Titel „Physisches Deep Learning mit biologisch inspirierter Trainingsmethode: Gradientenfreier Ansatz für physische Hardware“ und wurde am 26. Dezember 2022 in „Nature Communications“ veröffentlicht.
Physical Deep Learning
Die rekordverdächtige Leistung des auf künstlichen neuronalen Netzwerken (ANN) basierenden maschinellen Lernens in der Bildverarbeitung, Spracherkennung, Spielen usw. hat seine herausragenden Fähigkeiten erfolgreich unter Beweis gestellt. Obwohl diese Algorithmen der Funktionsweise des menschlichen Gehirns ähneln, werden sie im Wesentlichen auf Softwareebene mithilfe traditioneller Von-Neumann-Rechnerhardware implementiert. Solche auf digitalen Computern basierenden künstlichen neuronalen Netze haben jedoch Probleme hinsichtlich des Energieverbrauchs und der Verarbeitungsgeschwindigkeit. Diese Probleme motivieren den Einsatz alternativer physikalischer Plattformen für die Implementierung künstlicher neuronaler Netze.
Interessanterweise können sogar passive physikalische Dynamiken als Rechenressourcen in zufällig verbundenen KNNs verwendet werden. Bekannt als „Physical Reservoir Computer“ (RC) oder „Extreme Learning Machine“ (ELM), erweitert die einfache Implementierung dieses Frameworks die Auswahl der realisierbaren Materialien und deren Anwendungsbereich erheblich. Solche physikalisch implementierten neuronalen Netze (PNNs) sind in der Lage, aufgabenspezifische Rechenlast auf physikalische Systeme auszulagern.
Der Aufbau tieferer physischer Netzwerke ist eine vielversprechende Richtung zur weiteren Verbesserung der Leistung, da sie die Netzwerkausdrucksfähigkeiten exponentiell erweitern können. Dies motiviert zu Vorschlägen für tiefe PNNs, die verschiedene physische Plattformen nutzen. Ihr Training basiert im Wesentlichen auf einer Methode namens Backpropagation (BP), die bei softwarebasierten KNNs große Erfolge erzielt hat. In den folgenden Aspekten ist BP jedoch nicht für PNN geeignet. Erstens bleibt die physische Implementierung von BP-Operationen komplex und nicht skalierbar. Zweitens erfordert BP ein genaues Verständnis des gesamten physikalischen Systems. Wenn wir BP auf RC anwenden, untergraben diese Anforderungen außerdem die einzigartigen Eigenschaften des physikalischen RC, nämlich dass wir physikalische stochastische Black-Box-Netzwerke genau verstehen und simulieren müssen.
Wie BP in PNN wurde auch die Rationalität von BP im Gehirn immer wieder auf die Schwierigkeit hingewiesen, BP in biologischen neuronalen Netzen zu betreiben. Diese Überlegungen haben zur Entwicklung biologisch fundierter Trainingsalgorithmen geführt.
Eine vielversprechende Richtung in naher Zukunft ist Direct Feedback Alignment (DFA). In diesem Algorithmus wird eine feste zufällige lineare Transformation des endgültigen Fehlersignals der Ausgangsschicht verwendet, um das umgekehrte Fehlersignal zu ersetzen. Daher erfordert diese Methode keine schichtweise Ausbreitung von Fehlersignalen oder Kenntnisse über Gewichte. Darüber hinaus soll DFA auf moderne große Netzwerkmodelle skalierbar sein. Der Erfolg dieses biologisch motivierten Trainings legt nahe, dass es einen geeigneteren Weg gibt, PNN zu trainieren als BP. Allerdings benötigt DFA für das Training immer noch die Ableitung f'(a) der nichtlinearen Funktion f(x), was die Anwendung der DFA-Methode in physikalischen Systemen behindert. Daher ist eine größere Skalierung von DFA für PNN-Anwendungen wichtig.
DFA und seine Erweiterung des physikalischen Deep Learning
Hier demonstrieren Forscher physikalisches Deep Learning durch die Verbesserung des DFA-Algorithmus. Im erweiterten DFA ersetzen wir die Ableitung der physikalischen nichtlinearen Aktivierung f'(a) im Standard-DFA durch ein beliebiges nichtlineares g(a) und zeigen, dass die Leistung gegenüber der Wahl von g(a) robust ist. Aufgrund dieser Verbesserung ist es nicht mehr notwendig, f'(a) genau zu modellieren. Da die vorgeschlagene Methode auf parallelen stochastischen Projektionen mit beliebigen nichtlinearen Aktivierungen basiert, können die Trainingsberechnungen auf physikalischen Systemen auf die gleiche Weise durchgeführt werden wie physikalische ELM- oder RC-Konzepte. Dies ermöglicht eine physische Beschleunigung der Schlussfolgerung und des Trainings.

Abbildung: Konzept von PNN und dessen Training durch BP und Augmented DFA. (Quelle: Papier)
Um den Proof of Concept zu demonstrieren, bauten die Forscher einen FPGA-unterstützten optoelektronischen Deep-Physics-RC als Werkbank. Obwohl Benchtop einfach zu verwenden ist und nur mit Aktualisierungen auf Softwareebene auf eine Vielzahl physischer Plattformen angewendet werden kann, erreicht es eine Leistung, die mit großen und komplexen Systemen auf dem neuesten Stand der Technik vergleichbar ist.

Abbildung: Optoelektronisches Tiefen-RC-System mit erweitertem DFA-Training. (Quelle: Papier)
Darüber hinaus wurde die gesamte Bearbeitungszeit, einschließlich der Zeit der digitalen Verarbeitung, verglichen und die Möglichkeit einer körperlichen Beschleunigung des Trainingsprozesses festgestellt.

Abbildung: Leistung des optoelektronischen Deep-RC-Systems. (Quelle: Paper)
Das Verarbeitungszeitbudget der RC-Bank setzt sich wie folgt zusammen: FPGA-Verarbeitung (Datenübertragung, Speicherzuweisung und DAC/ADC) ~92 % digitale Verarbeitung für Vorverarbeitung/Nachbearbeitung; Verarbeitung. Daher wird die Verarbeitungszeit derzeit von numerischen Berechnungen auf FPGAs und CPUs dominiert. Dies liegt daran, dass die optoelektronische Bank ein Reservoir mit nur einer nichtlinearen Verzögerungsleitung implementiert; diese Einschränkungen könnten durch den Einsatz vollständig paralleler und rein optischer Rechenhardware gelockert werden. Wie man sehen kann, zeigt die Berechnung auf CPU und GPU einen Trend von O(N^2) für die Anzahl der Knoten, während auf dem Tisch O(N) angezeigt wird, was auf den Datenübertragungsengpass zurückzuführen ist.
Physische Beschleunigung außerhalb der CPU wird bei N ~5.000 bzw. ~12.000 für den BP- und den erweiterten DFA-Algorithmus beobachtet. Hinsichtlich der Rechengeschwindigkeit wurde jedoch aufgrund ihrer Speicherbeschränkungen keine direkte Wirksamkeit gegenüber GPUs beobachtet. Durch Extrapolation des GPU-Trends kann bei N ~80.000 eine physikalische Beschleunigung gegenüber der GPU beobachtet werden. Unseres Wissens ist dies der erste Vergleich des gesamten Trainingsprozesses und die erste Demonstration der Beschleunigung des körperlichen Trainings mithilfe von PNNs.
Um die Anwendbarkeit der vorgeschlagenen Methode auf andere Systeme zu untersuchen, wurden numerische Simulationen mit dem umfassend untersuchten photonischen neuronalen Netzwerk durchgeführt. Darüber hinaus hat sich die experimentell nachgewiesene verzögerungsbasierte RC als gut geeignet für verschiedene physikalische Systeme erwiesen. Was die Skalierbarkeit physischer Systeme betrifft, ist das Hauptproblem beim Aufbau tiefer Netzwerke ihr inhärentes Rauschen. Die Auswirkungen von Lärm werden durch numerische Simulationen untersucht. Das System erwies sich als robust gegenüber Rauschen.
Skalierbarkeit und Einschränkungen des vorgeschlagenen Ansatzes
Hier wird die Skalierbarkeit des DFA-basierten Ansatzes auf modernere Modelle betrachtet. Eines der am häufigsten verwendeten Modelle für praktisches Deep Learning ist das Deep Connected Convolutional Neural Network (CNN). Es wurde jedoch berichtet, dass der DFA-Algorithmus schwierig auf Standard-CNNs anzuwenden ist. Daher kann es schwierig sein, die vorgeschlagene Methode auf einfache Weise auf Faltungs-PNNs anzuwenden.
Die Anwendbarkeit auf SNN ist auch ein wichtiges Thema im Hinblick auf die Implementierung der Simulationshardware. Es wurde über die Anwendbarkeit von DFA-basiertem Training auf SNN berichtet, was bedeutet, dass das in dieser Studie vorgeschlagene verbesserte DFA das Training erleichtern kann.
Während DFA-basierte Algorithmen das Potenzial haben, auf praktischere Modelle als einfaches MLP oder RC erweitert zu werden, bleibt die Wirksamkeit der Anwendung von DFA-basiertem Training auf solche Netzwerke unbekannt. Als zusätzliche Arbeit zu dieser Studie wird hier die Skalierbarkeit von DFA-basiertem Training (DFA selbst und erweitertes DFA) auf die oben genannten Modelle (MLP-Mixer, Vision Transformer (ViT), ResNet und SNN) untersucht. Auch für explorative Praxismodelle erwies sich das DFA-basierte Training als wirksam. Obwohl die erreichbare Genauigkeit des DFA-basierten Trainings wesentlich geringer ist als die des BP-Trainings, können einige Anpassungen des Modells und/oder des Algorithmus die Leistung verbessern. Bemerkenswert ist, dass die Genauigkeit von DFA und erweiterter DFA für alle untersuchten experimentellen Einstellungen vergleichbar war, was darauf hindeutet, dass weitere Verbesserungen von DFA selbst direkt zur Verbesserung von erweiterter DFA beitragen werden. Die Ergebnisse zeigen, dass die Methode über einfache MLP- oder RC-Modelle hinaus auf zukünftige Implementierungen praktischer PNN-Modelle ausgeweitet werden kann.
Tabelle 1: Anwendbarkeit von erweiterter DFA auf reale Netzwerkmodelle. (Quelle: Papier)

BP vs. DFA in physischer Hardware
Im Allgemeinen ist BP sehr schwierig auf physischer Hardware zu implementieren, da dafür alle Informationen im Diagramm berechnet werden müssen. Daher wurde das Training auf physischer Hardware immer durch Computersimulationen durchgeführt, was hohe Rechenkosten verursacht. Darüber hinaus führen Unterschiede zwischen Modell und tatsächlichem System zu einer verringerten Genauigkeit. Im Gegensatz dazu erfordert erweiterte DFA keine genauen Vorkenntnisse über das physikalische System. Daher sind DFA-basierte Methoden in tiefen PNN hinsichtlich der Genauigkeit effektiver als BP-basierte Methoden. Darüber hinaus kann physische Hardware zur Beschleunigung von Berechnungen eingesetzt werden.
Darüber hinaus erfordert das DFA-Training keine sequentielle Fehlerausbreitung, die Schicht für Schicht berechnet wird, was bedeutet, dass das Training jeder Schicht parallel durchgeführt werden kann. Daher kann eine optimiertere und parallelere DFA-Implementierung zu deutlicheren Geschwindigkeitssteigerungen führen. Diese einzigartigen Eigenschaften belegen die Wirksamkeit DFA-basierter Methoden, insbesondere für neuronale Netze, die auf physischer Hardware basieren. Andererseits ist die Genauigkeit des verbesserten DFA-trainierten Modells immer noch schlechter als die des BP-trainierten Modells. Die weitere Verbesserung der Genauigkeit des DFA-basierten Trainings bleibt zukünftige Arbeit.
Weitere physikalische Beschleunigung
Die physikalische Implementierung demonstriert die Beschleunigung der RC-Schleifenverarbeitung mit großen Knotenzahlen. Die Vorteile sind jedoch noch begrenzt und weitere Verbesserungen sind erforderlich. Die Verarbeitungszeit des aktuellen Prototyps wird als Datenübertragung und Speicherzuweisung zum FPGA ausgedrückt. Daher führt die Integration aller Prozesse in ein FPGA zu einer erheblichen Leistungssteigerung auf Kosten der experimentellen Flexibilität. Darüber hinaus werden luftgestützte optische Verfahren in Zukunft die Übertragungskosten deutlich senken. Die groß angelegte optische Integration und die On-Chip-Integration werden die Leistung des optischen Rechnens selbst weiter verbessern.
Das obige ist der detaillierte Inhalt vonPhysisches Deep Learning mit biologisch inspirierten Trainingsmethoden: Ein Gradienten-freier Ansatz für physische Hardware. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
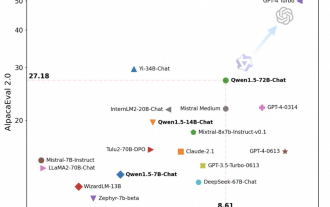 Tongyi Qianwen ist wieder Open Source, Qwen1.5 bietet sechs Volumenmodelle und seine Leistung übertrifft GPT3.5
Feb 07, 2024 pm 10:15 PM
Tongyi Qianwen ist wieder Open Source, Qwen1.5 bietet sechs Volumenmodelle und seine Leistung übertrifft GPT3.5
Feb 07, 2024 pm 10:15 PM
Pünktlich zum Frühlingsfest ist Version 1.5 des Tongyi Qianwen Large Model (Qwen) online. Heute Morgen erregten die Neuigkeiten über die neue Version die Aufmerksamkeit der KI-Community. Die neue Version des großen Modells umfasst sechs Modellgrößen: 0,5B, 1,8B, 4B, 7B, 14B und 72B. Unter ihnen übertrifft die Leistung der stärksten Version GPT3.5 und Mistral-Medium. Diese Version umfasst das Basismodell und das Chat-Modell und bietet Unterstützung für mehrere Sprachen. Das Tongyi Qianwen-Team von Alibaba gab an, dass die entsprechende Technologie auch auf der offiziellen Website von Tongyi Qianwen und der Tongyi Qianwen App eingeführt wurde. Darüber hinaus bietet die heutige Version von Qwen 1.5 auch die folgenden Highlights: Unterstützt eine Kontextlänge von 32 KB und öffnet den Prüfpunkt des Base+Chat-Modells.
 Verzichten Sie auf die Encoder-Decoder-Architektur und verwenden Sie das Diffusionsmodell zur Kantenerkennung, das effektiver ist. Die National University of Defense Technology hat DiffusionEdge vorgeschlagen
Feb 07, 2024 pm 10:12 PM
Verzichten Sie auf die Encoder-Decoder-Architektur und verwenden Sie das Diffusionsmodell zur Kantenerkennung, das effektiver ist. Die National University of Defense Technology hat DiffusionEdge vorgeschlagen
Feb 07, 2024 pm 10:12 PM
Aktuelle Deep-Edge-Erkennungsnetzwerke verwenden normalerweise eine Encoder-Decoder-Architektur, die Up- und Down-Sampling-Module enthält, um mehrstufige Merkmale besser zu extrahieren. Diese Struktur schränkt jedoch die Ausgabe genauer und detaillierter Kantenerkennungsergebnisse des Netzwerks ein. Als Antwort auf dieses Problem bietet ein Papier zu AAAI2024 eine neue Lösung. Titel der Abschlussarbeit: DiffusionEdge:DiffusionProbabilisticModelforCrispEdgeDetection Autoren: Ye Yunfan (Nationale Universität für Verteidigungstechnologie), Xu Kai (Nationale Universität für Verteidigungstechnologie), Huang Yuxing (Nationale Universität für Verteidigungstechnologie), Yi Renjiao (Nationale Universität für Verteidigungstechnologie), Cai Zhiping (National University of Defense Technology) Link zum Papier: https://ar
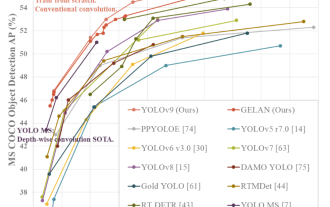 YOLO ist unsterblich! YOLOv9 wird veröffentlicht: Leistung und Geschwindigkeit SOTA~
Feb 26, 2024 am 11:31 AM
YOLO ist unsterblich! YOLOv9 wird veröffentlicht: Leistung und Geschwindigkeit SOTA~
Feb 26, 2024 am 11:31 AM
Heutige Deep-Learning-Methoden konzentrieren sich darauf, die am besten geeignete Zielfunktion zu entwerfen, damit die Vorhersageergebnisse des Modells der tatsächlichen Situation am nächsten kommen. Gleichzeitig muss eine geeignete Architektur entworfen werden, um ausreichend Informationen für die Vorhersage zu erhalten. Bestehende Methoden ignorieren die Tatsache, dass bei der schichtweisen Merkmalsextraktion und räumlichen Transformation der Eingabedaten eine große Menge an Informationen verloren geht. Dieser Artikel befasst sich mit wichtigen Themen bei der Datenübertragung über tiefe Netzwerke, nämlich Informationsengpässen und umkehrbaren Funktionen. Darauf aufbauend wird das Konzept der programmierbaren Gradienteninformation (PGI) vorgeschlagen, um die verschiedenen Änderungen zu bewältigen, die tiefe Netzwerke zur Erreichung mehrerer Ziele erfordern. PGI kann vollständige Eingabeinformationen für die Zielaufgabe zur Berechnung der Zielfunktion bereitstellen und so zuverlässige Gradienteninformationen zur Aktualisierung der Netzwerkgewichte erhalten. Darüber hinaus wird ein neues, leichtgewichtiges Netzwerk-Framework entworfen
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Was? Wird Zootopia durch heimische KI in die Realität umgesetzt? Zusammen mit dem Video wird ein neues groß angelegtes inländisches Videogenerationsmodell namens „Keling“ vorgestellt. Sora geht einen ähnlichen technischen Weg und kombiniert eine Reihe selbst entwickelter technologischer Innovationen, um Videos zu produzieren, die nicht nur große und vernünftige Bewegungen aufweisen, sondern auch die Eigenschaften der physischen Welt simulieren und über starke konzeptionelle Kombinationsfähigkeiten und Vorstellungskraft verfügen. Den Daten zufolge unterstützt Keling die Erstellung ultralanger Videos von bis zu 2 Minuten mit 30 Bildern pro Sekunde, mit Auflösungen von bis zu 1080p und unterstützt mehrere Seitenverhältnisse. Ein weiterer wichtiger Punkt ist, dass es sich bei Keling nicht um eine vom Labor veröffentlichte Demo oder Video-Ergebnisdemonstration handelt, sondern um eine Anwendung auf Produktebene, die von Kuaishou, einem führenden Anbieter im Bereich Kurzvideos, gestartet wurde. Darüber hinaus liegt das Hauptaugenmerk darauf, pragmatisch zu sein, keine Blankoschecks auszustellen und sofort nach der Veröffentlichung online zu gehen. Das große Modell von Ke Ling wurde bereits in Kuaiying veröffentlicht.
 Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Ich weine zu Tode. Die Daten im Internet reichen überhaupt nicht aus. Das Trainingsmodell sieht aus wie „Die Tribute von Panem“, und KI-Forscher auf der ganzen Welt machen sich Gedanken darüber, wie sie diese datenhungrigen Esser ernähren sollen. Dieses Problem tritt insbesondere bei multimodalen Aufgaben auf. Zu einer Zeit, als sie ratlos waren, nutzte ein Start-up-Team der Abteilung der Renmin-Universität von China sein eigenes neues Modell, um als erstes in China einen „modellgenerierten Datenfeed selbst“ in die Realität umzusetzen. Darüber hinaus handelt es sich um einen zweigleisigen Ansatz auf der Verständnisseite und der Generierungsseite. Beide Seiten können hochwertige, multimodale neue Daten generieren und Datenrückmeldungen an das Modell selbst liefern. Was ist ein Modell? Awaker 1.0, ein großes multimodales Modell, das gerade im Zhongguancun-Forum erschienen ist. Wer ist das Team? Sophon-Motor. Gegründet von Gao Yizhao, einem Doktoranden an der Hillhouse School of Artificial Intelligence der Renmin University.
 Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Kürzlich wurde die Militärwelt von der Nachricht überwältigt: US-Militärkampfflugzeuge können jetzt mithilfe von KI vollautomatische Luftkämpfe absolvieren. Ja, erst kürzlich wurde der KI-Kampfjet des US-Militärs zum ersten Mal der Öffentlichkeit zugänglich gemacht und sein Geheimnis gelüftet. Der vollständige Name dieses Jägers lautet „Variable Stability Simulator Test Aircraft“ (VISTA). Er wurde vom Minister der US-Luftwaffe persönlich geflogen, um einen Eins-gegen-eins-Luftkampf zu simulieren. Am 2. Mai startete US-Luftwaffenminister Frank Kendall mit einer X-62AVISTA auf der Edwards Air Force Base. Beachten Sie, dass während des einstündigen Fluges alle Flugaktionen autonom von der KI durchgeführt wurden! Kendall sagte: „In den letzten Jahrzehnten haben wir über das unbegrenzte Potenzial des autonomen Luft-Luft-Kampfes nachgedacht, aber es schien immer unerreichbar.“ Nun jedoch,
