
 Technologie-Peripheriegeräte
KI
Ernsthaft? Lassen Sie den Roboterhund der Torwart sein und veröffentlichen Sie einen Artikel
Technologie-Peripheriegeräte
KI
Ernsthaft? Lassen Sie den Roboterhund der Torwart sein und veröffentlichen Sie einen Artikel
Ernsthaft? Lassen Sie den Roboterhund der Torwart sein und veröffentlichen Sie einen Artikel

Ist es zuverlässig, einen Roboterhund als Fußballtorwart fungieren zu lassen? Ob es zuverlässig ist oder nicht, schauen wir uns zunächst den Effekt an und ziehen dann eine Schlussfolgerung.
Das Personal machte einen sehr milden Angriff und der Roboterhund blockte den Ball:
 #🎜 🎜#
#🎜 🎜#
Fügen Sie etwas Schwierigkeit hinzu und erzielen Sie ein parabolisches Tor, es ist kein Problem:

#🎜 🎜#
#🎜🎜 #Nachdem ich die Wirkung gesehen habe, habe ich das Gefühl, dass der Roboterhund als Torwart recht zuverlässig ist. Dieser Roboterhund ist Mini Cheetah, der 2019 vom MIT entwickelt wurde. Jetzt haben Forscher der University of California, Berkeley und anderer Institutionen ein neues Rahmenwerk für verstärkendes Lernen für Mini Cheetah eingeführt, das es ihm ermöglicht, Fußball-Torwartaufgaben mit einer Torwart-Erfolgsquote von 87,5 zu erfüllen % . 
Papieradresse: https://arxiv.org/pdf/2210.04435.pdf
 #🎜 🎜#4 Meter entfernt tretend
#🎜 🎜#4 Meter entfernt tretend
Mini Cheetah verteidigte das Tor erfolgreich in weniger als 1 Sekunde
Für Mini Cheetah ist es immer noch schwierig zu lernen, das Tor zu bewachen Da es sich hierbei um die Höhe handelt, in der ein Objekt (z. B. einen Ball) geworfen wird, und um die Position der dynamischen Bewegung. Insbesondere sind die Richtung und die Position des Balls für eine Partei ungewiss muss die Position des Balls schnell beurteilen, um zu verhindern, dass der Ball eindringt. Um dies zu erreichen, müssen Sie dem Roboter beibringen, seinen Körper dynamisch zu bewegen und gleichzeitig sicherzustellen, dass seine Füße (oder sein Gesicht) rechtzeitig dort ankommen, wo sie den Ball blockieren müssen. Das sind im Grunde zwei Rätsel in einem.Die Lösung der Forschung bestand darin, Bewegungssteuerungen mit der Planung der Endeffektor-Flugbahn zu kombinieren, sodass der beste Weg, Mini Cheetah auf den Ball zu bringen, innerhalb von weniger als einem Block gefunden werden konnte Sekunde nach Erreichen des Ziels.
Nachdem Sie den oben genannten Vorgang abgeschlossen haben, müssen Sie Mini Cheetah auch trainieren, um eine Reihe nützlicher Torwartfähigkeiten zu beherrschen, wie z Ball in Bodennähe abfangen, die Technik des Hechtens beherrschen, um die untere Ecke des Tores zu erreichen, zur oberen und oberen Ecke des Tores springen. Nach Abschluss dieser Aktionen kann sich Mini Cheetah erholen und schließlich sicher landen. Referenzbewegungen für jede Fähigkeit werden manuell programmiert, in der Simulation trainiert und dann direkt auf den Roboter übertragen.Mini Cheetah Das verteidigte Tor ist 1,5m breit und 0,9m hoch. Der Ball wird aus ca. 4m Entfernung geschossen die Außenseite und dann blockt Mini Cheetah den Ball. Die Leistung eines so kleinen Roboterhundes ist beeindruckend, wenn er die Ballblock-Aktion abschließt.
Die Studie zeigt, dass dieses Roboterhundsystem die in der Simulation erlernten dynamischen Bewegungen und Torwartfähigkeiten integrieren kann. Migriert auf a Bei einem echten vierbeinigen Roboter betrug die Erfolgsquote des Torwarts gegen zufällige Schüsse in der realen Welt 87,5 %. Die durchschnittliche Erfolgsquote menschlicher Fußballtorhüter liegt bei 69 %. Die Forscher sagen, dass ihr vorgeschlagener Rahmen auf andere Szenarien ausgeweitet werden kann, beispielsweise auf Multi-Skill-Fußball.
Werfen wir einen Blick auf das Gerüst hinter diesem Roboterhund.
Hierarchischer Lernrahmen für Verstärkung
Zuallererst ist es ein sehr herausforderndes Problem, einen vierbeinigen Roboter dazu zu bringen, als Fußballtorwart zu fungieren, da gleichzeitig die beiden praktischen Probleme gelöst werden müssen: die Vorhersage der Bewegungsbahn des Objekts und die Erfassung nicht- Frage nach greifbaren Objekten (Kugeln). Der Roboter muss innerhalb kürzester Zeit (normalerweise weniger als einer Sekunde) auf einen in der Luft fliegenden Ball reagieren und ihn abfangen.
Um diese Herausforderung zu meistern, schlug das Forschungsteam ein hierarchisches modellfreies Reinforcement Learning (RL)-Framework vor. Das Framework enthält eine Mehrfachkontrollstrategie für unterschiedliche motorische Fähigkeiten, die unterschiedliche Bereiche des Ziels abdeckt.

Diese Steuerungsstrategien ermöglichen es dem Roboter, die Flugbahnen zufällig parametrierter Endeffektoren zu verfolgen und dabei bestimmte motorische Fähigkeiten wie Springen, um den Ball zu blockieren, Tauchen und Auffangen des auf dem Boden rollenden Balls auszuführen.

Ein erweiterter Planer ist im RL-Framework enthalten, der dem Roboter hilft, die erforderlichen motorischen Fähigkeiten zu bestimmen und die Flugbahn des Endeffektors zu planen, um Bälle abzufangen, die auf verschiedene Zielbereiche zufliegen.
In dieser Studie wurde das oben erwähnte RL-Framework auf dem vom MIT im Jahr 2019 vorgeschlagenen Vierbeiner-Roboter Mini Cheetah eingesetzt. Experimente zeigen, dass dieses RL-Framework es dem Vierbeiner-Roboter ermöglichen kann, sich schnell bewegende Bälle in der realen Welt effektiv abzufangen.

Frühere Forschungen zum RL-Framework von vierbeinigen Robotern konzentrierten sich hauptsächlich auf die Bewegungssteuerung auf niedriger Ebene, z. B. darauf, den Roboter mit der erforderlichen Geschwindigkeit laufen zu lassen und Referenzbewegungen zu imitieren. Das in dieser Studie vorgeschlagene Framework erweitert die erlernten motorischen Fähigkeiten auf Aufgaben auf höherer Ebene und nutzt erfolgreich fortgeschrittene Planung, um einem vierbeinigen Roboter zu ermöglichen, einen sich schnell bewegenden Fußball mit agilen Bewegungen präzise abzufangen. Dies hat wichtige Auswirkungen auf die fortgeschrittene Planungssteuerung von vierbeinigen Robotern.
Das obige ist der detaillierte Inhalt vonErnsthaft? Lassen Sie den Roboterhund der Torwart sein und veröffentlichen Sie einen Artikel. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen



 Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Der Artikel von StableDiffusion3 ist endlich da! Dieses Modell wurde vor zwei Wochen veröffentlicht und verwendet die gleiche DiT-Architektur (DiffusionTransformer) wie Sora. Nach seiner Veröffentlichung sorgte es für großes Aufsehen. Im Vergleich zur Vorgängerversion wurde die Qualität der von StableDiffusion3 generierten Bilder erheblich verbessert. Es unterstützt jetzt Eingabeaufforderungen mit mehreren Themen, und der Textschreibeffekt wurde ebenfalls verbessert, und es werden keine verstümmelten Zeichen mehr angezeigt. StabilityAI wies darauf hin, dass es sich bei StableDiffusion3 um eine Reihe von Modellen mit Parametergrößen von 800 M bis 8 B handelt. Durch diesen Parameterbereich kann das Modell direkt auf vielen tragbaren Geräten ausgeführt werden, wodurch der Einsatz von KI deutlich reduziert wird
 Yun Shen Shen veröffentlicht den Flaggschiff-Roboterhund Jueying X30 für die Branchenanwendung
Oct 11, 2023 pm 09:45 PM
Yun Shen Shen veröffentlicht den Flaggschiff-Roboterhund Jueying X30 für die Branchenanwendung
Oct 11, 2023 pm 09:45 PM
Am 9. Oktober veröffentlichte Yunshen Technology den vierbeinigen Roboter „Jueying wissenschaftliche Forschung usw. Kernanforderungen in mehreren Bereichen bringen die weltweit führenden Branchenfähigkeiten mit sich: originelle integrierte Sensorfunktionen, die in Asien die Führung übernehmen, um eine schnelle und stabile Hindernisüberwindung in wechselnden Umgebungen zu erreichen, hohle Industrietreppen hinauf und hinunter zu gehen und bei jedem Wetter autonom zu sein Inspektionen Tag und Nacht, wodurch mehr Szenenbeschränkungen aufgehoben werden. Er kann zum ersten Mal in Asien schnell auf unerwartete Aufgaben reagieren. Der Betriebstemperaturbereich eines vierbeinigen Roboters wurde auf -20 °C bis 55 °C erweitert, was die Anwendung erheblich erweitert Bereiche und Jahreszeiten; es verfügt über ein eigenes Echtzeitüberwachungssystem und ein Notfallreaktionssystem, um einen intelligenteren Betrieb zu gewährleisten. Siebzehn Abteilungen, darunter das Ministerium für Industrie und Informationstechnologie, haben die „Maschine“ herausgegeben
 ICCV'23-Papierpreis „Fighting of Gods'! Meta Divide Everything und ControlNet wurden gemeinsam ausgewählt, und es gab einen weiteren Artikel, der die Jury überraschte
Oct 04, 2023 pm 08:37 PM
ICCV'23-Papierpreis „Fighting of Gods'! Meta Divide Everything und ControlNet wurden gemeinsam ausgewählt, und es gab einen weiteren Artikel, der die Jury überraschte
Oct 04, 2023 pm 08:37 PM
ICCV2023, die Top-Computer-Vision-Konferenz in Paris, Frankreich, ist gerade zu Ende gegangen! Der diesjährige Preis für das beste Papier ist einfach ein „Kampf zwischen Göttern“. Zu den beiden Arbeiten, die den Best Paper Award gewannen, gehörte beispielsweise ControlNet, eine Arbeit, die das Gebiet der vinzentinischen Graphen-KI untergrub. Seitdem ControlNet als Open-Source-Lösung verfügbar ist, hat es auf GitHub 24.000 Sterne erhalten. Ob es sich um Diffusionsmodelle oder den gesamten Bereich der Computer Vision handelt, die Auszeichnung für dieses Papier ist wohlverdient. Die lobende Erwähnung für die beste Arbeit ging an eine andere ebenso berühmte Arbeit, Metas „Separate Everything“ „Model SAM“. Seit seiner Einführung ist „Segment Everything“ zum „Benchmark“ für verschiedene Bildsegmentierungs-KI-Modelle geworden, auch für solche, die von hinten kamen.
 NeRF und die Vergangenheit und Gegenwart des autonomen Fahrens, eine Zusammenfassung von fast 10 Artikeln!
Nov 14, 2023 pm 03:09 PM
NeRF und die Vergangenheit und Gegenwart des autonomen Fahrens, eine Zusammenfassung von fast 10 Artikeln!
Nov 14, 2023 pm 03:09 PM
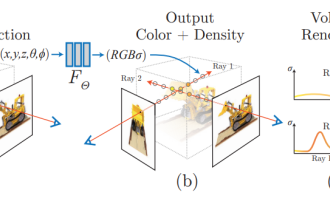
Seit Neural Radiance Fields im Jahr 2020 vorgeschlagen wurde, hat die Zahl verwandter Arbeiten exponentiell zugenommen. Es hat sich nicht nur zu einem wichtigen Zweig der dreidimensionalen Rekonstruktion entwickelt, sondern ist auch allmählich an der Forschungsgrenze als wichtiges Werkzeug für autonomes Fahren aktiv geworden . NeRF ist in den letzten zwei Jahren plötzlich aufgetaucht, hauptsächlich weil es die Merkmalspunktextraktion und -anpassung, die epipolare Geometrie und Triangulation, PnP plus Bündelanpassung und andere Schritte der traditionellen CV-Rekonstruktionspipeline und sogar die Netzrekonstruktion, Kartierung und Lichtverfolgung überspringt , direkt aus 2D Das Eingabebild wird verwendet, um ein Strahlungsfeld zu lernen, und dann wird aus dem Strahlungsfeld ein gerendertes Bild ausgegeben, das einem echten Foto nahekommt. Mit anderen Worten: Lassen Sie ein implizites dreidimensionales Modell, das auf einem neuronalen Netzwerk basiert, zur angegebenen Perspektive passen
 Feuer spucken und gleichzeitig tanzen: Die neueste Fähigkeit des Roboterhundes erfreut sich im gesamten Internet großer Beliebtheit! Internetnutzer nennen es „True Hot Dog'
Jun 28, 2023 pm 06:20 PM
Feuer spucken und gleichzeitig tanzen: Die neueste Fähigkeit des Roboterhundes erfreut sich im gesamten Internet großer Beliebtheit! Internetnutzer nennen es „True Hot Dog'
Jun 28, 2023 pm 06:20 PM
Nachdem Musk den Flammenwerfer erfunden hat, kann jetzt sogar der Roboterhund lernen, Feuer zu spucken. Aufstehen, zielen und Feuer spucken, eine ganze Reihe von Aktionen auf einmal – und nicht nur das, Sie können sogar „Stepptanz“ machen, während Sie Feuer speien: Dieses magische Video erreichte schnell über 7.000 Aufrufe auf Reddit. Einige Internetnutzer scherzten: „Danke.“ Erinnert mich daran, Black Mirror noch einmal zu besuchen. Bild Bild Einige Internetnutzer schlugen vor, den Namen in „Hot Dog“ zu ändern: „Ich weiß, jemand muss es so nennen.“ Bild Bild Wie sieht dieser „Hot Dog“ aus? Wie sieht ein feuerspeiender Roboterhund aus? Dieser feuerspeiende Roboterhund heißt Themonator und stammt von einer Firma namens ThrowFlame. Laut der offiziellen Website beträgt sein Gewicht etwa 16 kg (37 lbs) und seine Größe beträgt etwa 76 x 51 x 51 Zoll
 Auch Papierillustrationen können mithilfe des Diffusionsmodells automatisch generiert werden und werden auch vom ICLR akzeptiert.
Jun 27, 2023 pm 05:46 PM
Auch Papierillustrationen können mithilfe des Diffusionsmodells automatisch generiert werden und werden auch vom ICLR akzeptiert.
Jun 27, 2023 pm 05:46 PM
Generative KI hat die Community der künstlichen Intelligenz im Sturm erobert. Sowohl Einzelpersonen als auch Unternehmen sind daran interessiert, entsprechende modale Konvertierungsanwendungen wie Vincent-Bilder, Vincent-Videos, Vincent-Musik usw. zu erstellen. In jüngster Zeit haben mehrere Forscher von wissenschaftlichen Forschungseinrichtungen wie ServiceNow Research und LIVIA versucht, Diagramme in Aufsätzen basierend auf Textbeschreibungen zu erstellen. Zu diesem Zweck schlugen sie eine neue Methode von FigGen vor, und das entsprechende Papier wurde auch als TinyPaper in ICLR2023 aufgenommen. Adresse des Bildpapiers: https://arxiv.org/pdf/2306.00800.pdf Manche Leute fragen sich vielleicht: Was ist so schwierig daran, die Diagramme im Papier zu erstellen? Wie hilft dies der wissenschaftlichen Forschung?
 Chat-Screenshots enthüllen versteckte Regeln für KI-Rezensenten! AAAI 3000 Yuan ist stark zu akzeptieren?
Apr 12, 2023 am 08:34 AM
Chat-Screenshots enthüllen versteckte Regeln für KI-Rezensenten! AAAI 3000 Yuan ist stark zu akzeptieren?
Apr 12, 2023 am 08:34 AM
Gerade als die Einreichungsfrist für AAAI 2023-Papiere näher rückte, erschien plötzlich ein Screenshot eines anonymen Chats in der AI-Einreichungsgruppe auf Zhihu. Einer von ihnen behauptete, er könne „3.000 Yuan pro starkem Akzept“ anbieten. Sobald die Nachricht bekannt wurde, erregte sie sofort öffentliche Empörung unter den Internetnutzern. Aber beeilen Sie sich noch nicht. Zhihu-Chef „Fine Tuning“ sagte, dass dies höchstwahrscheinlich nur ein „verbales Vergnügen“ sei. Laut „Fine Tuning“ sind Begrüßungen und Bandenkriminalität in jedem Bereich unvermeidbare Probleme. Mit dem Aufkommen von OpenReview werden die verschiedenen Nachteile von cmt immer deutlicher. Der Spielraum für kleine Kreise wird in Zukunft kleiner, aber es wird immer Platz geben. Denn es handelt sich um ein persönliches Problem und nicht um ein Problem mit dem Einreichungssystem und -mechanismus. Wir stellen Open R vor
 CVPR-Rangliste 2023 veröffentlicht, die Akzeptanzrate beträgt 25,78 %! 2.360 Beiträge wurden angenommen und die Zahl der Einreichungen stieg auf 9.155
Apr 13, 2023 am 09:37 AM
CVPR-Rangliste 2023 veröffentlicht, die Akzeptanzrate beträgt 25,78 %! 2.360 Beiträge wurden angenommen und die Zahl der Einreichungen stieg auf 9.155
Apr 13, 2023 am 09:37 AM
Gerade hat CVPR 2023 eine Erklärung herausgegeben, in der es heißt: In diesem Jahr haben wir eine Rekordzahl von 9.155 Beiträgen erhalten (ein Anstieg von 12 % gegenüber CVPR 2022) und 2.360 Beiträge angenommen, was einer Annahmequote von 25,78 % entspricht. Laut Statistik stieg die Zahl der Einreichungen beim CVPR in den sieben Jahren von 2010 bis 2016 lediglich von 1.724 auf 2.145. Nach 2017 stieg sie rasant an und trat in eine Phase rasanten Wachstums ein. Im Jahr 2019 überstieg sie erstmals die 5.000-Marke, und bis 2022 lag die Zahl der Einreichungen bei 8.161. Wie Sie sehen, wurden in diesem Jahr insgesamt 9.155 Beiträge eingereicht, was einen Rekord darstellt. Nachdem sich die Epidemie abgeschwächt hat, wird der diesjährige CVPR-Gipfel in Kanada stattfinden. In diesem Jahr wird das Format einer eingleisigen Konferenz übernommen und die traditionelle mündliche Auswahl entfällt. Google-Recherche
