
 Technologie-Peripheriegeräte
KI
Wenn Transformer als Allzweckcomputer verwendet wird, kann er auch kontextbezogene Lernalgorithmen ausführen. Diese Forschung ist sehr einfallsreich.
Technologie-Peripheriegeräte
KI
Wenn Transformer als Allzweckcomputer verwendet wird, kann er auch kontextbezogene Lernalgorithmen ausführen. Diese Forschung ist sehr einfallsreich.
Wenn Transformer als Allzweckcomputer verwendet wird, kann er auch kontextbezogene Lernalgorithmen ausführen. Diese Forschung ist sehr einfallsreich.

Transformer ist zu einer beliebten Wahl für verschiedene maschinelle Lernaufgaben geworden und hat gute Ergebnisse erzielt. Wie kann es also sonst verwendet werden? Forscher mit großer Fantasie wollen damit tatsächlich programmierbare Computer entwerfen!

Die Autoren dieses Artikels stammen von der Princeton University und der University of Wisconsin. Er trägt den Titel „Looped Transformers as Programmable Computers“ und zielt darauf ab, zu untersuchen, wie Transformer zur Implementierung allgemeiner Computer verwendet werden kann.
Konkret schlagen die Autoren einen Rahmen für die Verwendung von Transformatornetzwerken als Allzweckcomputer vor, indem sie mit bestimmten Gewichten programmiert und in Schleifen platziert werden. In diesem Rahmen fungiert die Eingabesequenz als Lochkarte, bestehend aus Anweisungen und Speicher zum Lesen/Schreiben von Daten.
Die Autoren haben gezeigt, dass eine konstante Anzahl von Encoderschichten grundlegende Rechenblöcke simulieren kann. Mit diesen Bausteinen simulierten sie einen kleinen Befehlssatzcomputer. Dies ermöglichte es ihnen, den iterativen Algorithmus einem Programm zuzuordnen, das von einem Schleifentransformator mit 13 Schichten ausgeführt werden konnte. Sie zeigen, wie dieser Transformator anhand seiner Eingaben einen einfachen Taschenrechner, eine grundlegende lineare Algebra-Bibliothek und einen kontextbezogenen Lernalgorithmus mithilfe von Backpropagation simulieren kann. Diese Arbeit unterstreicht die Vielseitigkeit von Aufmerksamkeitsmechanismen und zeigt, dass selbst oberflächliche Transformatoren umfassende Allzweckprogramme ausführen können.
Papierübersicht
Transformer (TF) ist zu einer beliebten Wahl für verschiedene maschinelle Lernaufgaben geworden und hat bei vielen Problemen in Bereichen wie der Verarbeitung natürlicher Sprache und Computer Vision modernste Ergebnisse erzielt. Ein Hauptgrund für den Erfolg von Transformer ist seine Fähigkeit, Beziehungen höherer Ordnung und langfristige Abhängigkeiten durch Aufmerksamkeitsmechanismen zu erfassen. Dies ermöglicht TF die Modellierung kontextbezogener Informationen und macht sie effektiver bei Aufgaben wie maschineller Übersetzung und Sprachmodellierung, bei denen Transformer andere Methoden durchweg übertrifft.
Sprachmodelle mit Hunderten von Milliarden Parametern, wie GPT-3 (175B Parameter) und PaLM (540B Parameter), haben bei vielen Aufgaben der Verarbeitung natürlicher Sprache eine Spitzenleistung erreicht. Interessanterweise können einige dieser großen Sprachmodelle (LLMs) auch In-Context-Learning (ICL) durchführen, indem sie bestimmte Aufgaben basierend auf einer kurzen Eingabeaufforderung und einigen Beispielen spontan anpassen und ausführen. Die ICL-Funktionen von LLMs sind verfügbar, ohne dass sie trainiert werden müssen, und ermöglichen es diesen großen Modellen, neue Aufgaben effizient auszuführen, ohne Gewichte zu aktualisieren.
Überraschenderweise kann LLM algorithmische Aufgaben und Inferenzen ausführen, und [Nye et al. [2021], Wei et al. [2022], Wei et al. Zhou et al. [2022] und andere haben die Machbarkeit bewiesen. Arbeiten von [Zhou et al. [2022]] und anderen zeigen, dass LLM Additionsoperationen für unbekannte Anwendungsfälle erfolgreich durchführen kann, wenn eine Eingabeaufforderung mit einem Multibit-Additionsalgorithmus und einigen Additionsbeispielen gegeben wird. Diese Ergebnisse zeigen, dass LLM auf der Grundlage algorithmischer Prinzipien vorab angewiesene Befehle für bestimmte Eingaben zum Zeitpunkt der Inferenz ausführen kann, als ob natürliche Sprache als Code interpretiert würde.
Es gibt Hinweise darauf, dass Transformer Turing-Maschinen mit ausreichender Tiefe oder rekursiven Verknüpfungen zwischen Aufmerksamkeitsschichten simulieren kann [Pérez et al. Dies zeigt das Potenzial von Transformer-Netzwerken, den durch die Eingabe spezifizierten algorithmischen Anweisungen genau zu folgen. Diese Konstrukte sind jedoch relativ allgemein gehalten und bieten kein tiefes Verständnis dafür, wie ein Transformer erstellt wird, der bestimmte algorithmische Aufgaben ausführen kann.
Ein professionelleres Design ermöglicht es TF jedoch, fortgeschrittenere Programme auszuführen. Beispielsweise haben [Weiss et al. [2021]] ein Rechenmodell und eine Programmiersprache entworfen, die einfache Auswahl- und Aggregationsbefehle auf Index-Eingabetoken abbilden. Diese Sprache kann zum Erstellen einer Vielzahl interessanter Algorithmen verwendet werden, z. B. zum Zählen und Sortieren von Token, zum Erstellen von Histogrammen und zum Identifizieren von Dyck-k-Sprachen. In der Restricted Access Sequence Processing Language (RASP) geschriebene Programme können dann in Transformer-Netzwerken abgebildet werden, deren Größe typischerweise mit der Größe des Programms skaliert.
Eine weitere Studie demonstriert eine Methode zur Auswahl von Transformer-Modellgewichten zur Verwendung als Optimierungsalgorithmus für das dynamische Lernen linearer Regressionsmodelle, wobei bei gegebenen Trainingsdaten als Eingabe ein implizites Training zur Inferenzzeit durchgeführt wird. Diese Methoden erfordern typischerweise eine Anzahl von Schichten proportional zur Anzahl der Iterationen des Lernalgorithmus und sind auf eine einzige Verlustfunktion und ein Ensemble von Modellen beschränkt.
Die Fähigkeit, Transformer-Modelle zu programmieren, um die abstrakten Berechnungen von Turing-Maschinen, spezielle Befehle für Sprachen wie RASP und spezifische Algorithmen für ICL zu emulieren, unterstreicht das Potenzial von Transformer-Netzwerken als vielseitige programmierbare Computer.
Die Forschung des Autors zielt darauf ab, diese vielversprechende Perspektive zu erkunden und aufzudecken, wie der Aufmerksamkeitsmechanismus einen Allzweckcomputer simulieren kann, der von der Befehlssatzarchitektur inspiriert ist.
Transformer als programmierbare Computer
In diesem Artikel zeigen die Autoren, dass Transformer-Netzwerke komplexe Algorithmen und Programme simulieren können, indem sie sie mit bestimmten Gewichten fest codieren und in eine Schleife platzieren. Die Autoren erreichten dies durch Reverse Engineering von Attention, um grundlegende Rechenblöcke zu simulieren, beispielsweise Bearbeitungsvorgänge an Eingabesequenzen, nichtlineare Funktionen, Funktionsaufrufe, Programmzähler und bedingte Verzweigungen. Der Artikel des Autors zeigt, wie wichtig es ist, eine einzelne Schleife oder Rekursion zu verwenden, um die Ausgabesequenz eines Transformers wieder mit seiner Eingabe zu verketten, wodurch die Notwendigkeit eines tiefen Modells vermieden wird.

Papieradresse: https://arxiv.org/pdf/2301.13196.pdf
Der Autor erreicht dies, indem er einen Transformer entwirft, der eine in einer einzigen Anweisung geschriebene generische Version des Programms ausführen kann , genannt SUBLEQ (A,B,C), subtrahiert und verzweigt, wenn es kleiner oder gleich Null ist. SUBLEQ ist eine Einzelanweisungssprache, die einen Ein-Befehlssatz-Computer (OISC) definiert. SUBLEQ besteht aus drei Speicheradressenoperanden. Während der Ausführung wird der Wert der Speicheradresse B vom Wert der Speicheradresse A subtrahiert und das Ergebnis in B gespeichert. Wenn das Ergebnis von B kleiner oder gleich 0 ist, springen Sie zur Adresse C, andernfalls fahren Sie mit der nächsten Anweisung fort. Diese Anweisung definiert jedoch einen Allzweckcomputer.
Der Autor hat einen expliziten Transformer erstellt, der ein SUBLEQ-ähnliches Programm implementiert, eine flexiblere Einzelanweisung, die der Autor FLEQ nennt, in der Form

wobei f_m aus einer Menge von erhalten werden kann Funktionen (Matrixmultiplikation / nichtlineare Funktion / Polynom usw.), die fest in das Netzwerk codiert werden können. Die Tiefe eines Schleifentransformators, der ein FLEQ-Programm ausführen kann, hängt nicht von der Tiefe des Programms oder der Anzahl der Codezeilen ab, sondern vielmehr von der Tiefe, die zum Implementieren eines einzelnen FLEQ-Befehls erforderlich ist, was konstant ist. Dies wird erreicht, indem der Transformer in einer Schleife über die Eingabesequenz ausgeführt wird, ähnlich wie eine CPU arbeitet.
Mit diesem Framework demonstrieren die Autoren die Fähigkeit, eine Vielzahl von Funktionen zur Inferenzzeit zu simulieren, darunter einen einfachen Taschenrechner, eine grundlegende lineare Algebra-Bibliothek (Matrixtransponierung, Multiplikation, Inversion, Potenziteration) und eine implizite ICL, die Backpropagation implementiert in einem vollständig verbundenen Netzwerk. Die Eingabesequenz oder Eingabeaufforderung verhält sich wie eine Lochkarte, die die Anweisungen enthält, die der Transformer ausführen muss, und gleichzeitig Platz zum Speichern und Bearbeiten der im Programm verwendeten Variablen bietet. Die zur Durchführung dieser Verfahren verwendeten Transformer-Netzwerke haben alle eine Tiefe kleiner oder gleich 13, und die Gewichtsmatrizen für alle diese Modelle werden bereitgestellt. Der folgende Satz fasst die wichtigsten Erkenntnisse des Autors zusammen:
Satz 1: Es gibt einen zyklischen Transformator mit weniger als 13 Schichten, der einen allgemeinen Computer (Abschnitt 5 des Artikels) und einen einfachen Taschenrechner (Abschnitt 7 des Artikels) simulieren kann ), numerische lineare Algebra-Methoden wie ungefähre Matrixinversion und Potenziteration (Abschnitt 8 des Artikels) und auf neuronalen Netzwerken basierende ICL-Algorithmen (wie SGD) (Abschnitt 9 des Artikels).

Abbildung 1: Schematische Darstellung der Looping-Transformer-Architektur, wobei die Eingabesequenz Befehle speichert, der Speicher, aus dem Daten gelesen/geschrieben werden, und der Notizblock, auf dem Zwischenergebnisse gespeichert werden. Eingaben werden vom Netzwerk verarbeitet und die Ausgaben werden als neue Eingaben verwendet, sodass das Netzwerk implizite Zustände iterativ aktualisieren und komplexe Berechnungen durchführen kann.
Die Forschung des Autors betont die Flexibilität des Aufmerksamkeitsmechanismus und die Bedeutung einer einzelnen Schleife, die es ermöglicht, Modelle zu entwerfen, die komplexe iterative Algorithmen simulieren und allgemeine Programme ausführen können. und demonstrierte außerdem die Fähigkeit des Transformer-Modells, komplexe mathematische und algorithmische Aufgaben effizient auszuführen. Es ist denkbar, dass moderne Transformer wie GPT-3 bei der Ausführung verschiedener Aufgaben ähnliche interne Unterprogramme verwenden. Bis zu einem gewissen Grad können die Fähigkeiten dieser modellspezifischen Techniken oder Algorithmen erläutert werden, wenn kontextbezogene Beispiele und Erklärungen gegeben werden, ähnlich wie bei Funktionsaufrufen. Diese Annahme ist jedoch mit Vorsicht zu genießen, da die Art und Weise, wie die Autoren die Struktur entworfen haben, keine Ähnlichkeit mit der Art und Weise hat, wie reale Sprachmodelle trainiert werden.
Die Autoren hoffen, dass ihre Forschung weitere Forschungen zum Potenzial von Aufmerksamkeitsmechanismen und der Fähigkeit von Sprachmodellen zur Ausführung algorithmischer Anweisungen anregen wird. Das von den Autoren vorgeschlagene Design kann dabei helfen, die minimale Transformer-Netzwerkgröße zu bestimmen, die zur Ausführung einer bestimmten algorithmischen Aufgabe erforderlich ist. Darüber hinaus hoffen die Autoren, dass ihre Ergebnisse dazu beitragen werden, die Entwicklung von Methoden anzuregen, um die Fähigkeit zum Trainieren von Sprachmodellen zu verbessern, indem kleinere, rückentwickelte Transformer-Netzwerke genutzt werden, um bestimmte algorithmische Aufgaben zu erfüllen.
Aufbau eines Transformer-Moduls für die allgemeine Datenverarbeitung
Um das Transformer-Netzwerk zum Aufbau eines allgemeinen Datenverarbeitungsrahmens zu verwenden, ist ein spezieller Datenverarbeitungsblock erforderlich. Setzen Sie diese Blöcke zusammen, um die gewünschte Endfunktionalität zu schaffen. Im Folgenden konzentrieren wir uns auf die verschiedenen Vorgänge, die die Transformer-Schicht ausführen kann. Diese Operationen bilden die Grundlage für die Erstellung komplexerer Routinen und Algorithmen. Diese Operationen sollen miteinander interoperabel sein und die Fähigkeit von Attention nutzen, eine Vielzahl von Aufgaben auszuführen, wie etwa die Generierung von Näherungspermutationsmatrizen und die Approximation allgemeiner Funktionen über Sigmoidfunktionen.

Abbildung 2: Schematische Darstellung von drei Transformer-Blöcken, die als Bausteine für die Implementierung eines kleinen Befehlssatzcomputers dienen. Diese Blöcke verarbeiten Bearbeitungsvorgänge in der Eingabesequenz (z. B. Verschieben oder Kopieren von einem Block zu einem anderen), verfolgen den Programmzähler und führen Programmzählersprünge durch, wenn bestimmte Bedingungen erfüllt sind.
Positionskodierung, Programmzähler und Datenzeiger
Transformer muss normalerweise einen iterativen Algorithmus ausführen oder eine Befehlsfolge ausführen. Um dies zu erreichen, verwendet der Autor einen Programmzähler, der Befehle durchläuft. Der Zähler enthält einen Code für den Ort, an dem der nächste Befehl gespeichert ist. Darüber hinaus können Befehle über Datenzeiger verfügen, die auf die Datenspeicherorte verweisen, die der Befehl lesen und schreiben muss. Sowohl der Programmzähler als auch der Datenzeiger verwenden dieselbe Positionskodierung, die im vorherigen Absatz erläutert wurde.

Das Positionskodierungsschema des Autors kann auch verwendet werden, um auf bestimmte Datenspeicherorte zum Lesen oder Schreiben zu verweisen, was im nächsten Abschnitt erläutert wird. Dies wird erreicht, indem derselbe Binärvektor als Positionskodierung für den Programmzähler und den Datenzeiger verwendet wird. Darüber hinaus ermöglicht diese Technik des Verweisens auf bestimmte Datenspeicherorte Transformers das effiziente Lesen/Schreiben von Daten während der Ausführung eines Algorithmus oder einer Befehlsfolge, für deren Implementierung es entwickelt wurde.
Lesen/Schreiben: Daten und Anweisungen zum oder vom Notizblock kopieren

Abbildung 3: Schematische Darstellung des Lesevorgangs. Der Pfeil zeigt den Befehlsblock, der aus dem Eingabeteil kopiert wurde, der dem Scratchpad-Befehl zugewiesen ist. Eine Anweisung ist eine Menge von Zeigern. Positionscodes und Zähler werden verwendet, um zu verfolgen, welche Inhalte wohin kopiert werden.
Das folgende Lemma besagt, dass der Befehl, auf den der Programmzähler zeigt, oder die Daten an der im aktuellen Befehl angegebenen Stelle für weitere Berechnungen auf den Notizblock kopiert werden können. Die Position des Programmzählers befindet sich normalerweise direkt unter dem Inhalt des Notizblocks, kann aber beliebig geändert werden. Wenn Sie es während der gesamten Berechnung an einer bestimmten Position halten, bleibt die Struktur gut organisiert.
Das nächste Lemma erklärt, dass ein in einem Notizblock gespeicherter Vektor v an eine bestimmte Stelle im Speicher kopiert werden kann, die durch den Notizblock selbst angegeben wird. Dadurch können Daten vom Notizblock an einen bestimmten Speicherort zur weiteren Verwendung oder Speicherung übertragen werden.

Abbildung 4: Schematische Darstellung des Schreibvorgangs. Der Pfeil zeigt an, dass der Datenblock vom Notizblock an die angegebene Stelle im Eingabeabschnitt kopiert wird, der dem Speicher zugewiesen ist. Mithilfe der Positionskodierung werden Zielorte verfolgt und sichergestellt, dass Daten an den richtigen Speicherort geschrieben werden.

Bedingte Verzweigung
In diesem Teil implementiert der Autor eine bedingte Verzweigungsanweisung, die eine Bedingung auswertet und den Programmzähler auf einen angegebenen Ort setzt, wenn die Bedingung wahr ist. oder Erhöhen Sie den Programmzähler um 1, wenn die Bedingung falsch ist. Der Befehl
hat die Form: Wenn mem[a]≤0, dann gehe zu i, wobei mem[a] der Wert an einer Position im Speicherteil der Eingabesequenz ist. Dieser Befehl besteht aus zwei Teilen: der Beurteilung der Ungleichheit und der Änderung des Programmzählers.
Simuliert einen universellen Computer mit einem einzigen Befehlssatz.
SUBLEQ Transformer
Mavaddat und Parhami hatten bereits 1988 gezeigt, dass es eine Anweisung gibt und dass jedes Computerprogramm in ein Programm umgewandelt werden kann, das aus Instanziierungen von besteht diese Anleitung. Eine Variante dieses Befehls ist SUBLEQ, der auf verschiedene Register oder Speicherorte zugreifen kann.
Die Funktionsweise von SUBLEQ ist einfach. Es greift auf zwei Register im Speicher zu, ruft die Differenz ihrer Inhalte ab und speichert sie in einem der Register zurück. Wenn das Ergebnis dann negativ ist, springt es zu einer anderen vordefinierten Codezeile oder fährt mit der nächsten Anweisung der aktuellen Zeile fort. Ein Computer, der für die Ausführung von SUBLEQ-Programmen gebaut wurde, wird als Einzelbefehlssatzcomputer bezeichnet und ist ein Allzweckcomputer, d. h. er ist Turing-vollständig, wenn er Zugriff auf unendlich viel Speicher hat.

Im Folgenden wird der Aufbau eines Schleifentransformators beschrieben, der mit einem bestimmten Befehlssatz geschriebene Programme ausführen kann. Transformer verfolgt Codezeilen, Speicherorte und Programmzähler und verwendet dabei den Speicherteil der Eingabe als Speicherregister und den Befehlsteil als Codezeilen/Anweisungen. Das temporäre Register wird zum Aufzeichnen von Additionen und Zeigern verwendet, die an jeder Anweisung, beim Lesen, Schreiben, bei bedingten Verzweigungsoperationen usw. beteiligt sind.

Abbildung 5: Grafische Darstellung des implementierten OISC-Befehlsblocks. Die ersten beiden Blöcke übertragen die Daten/Befehle an den Notizblock, der zweite und dritte Block führen die Subtraktion durch und speichern das Ergebnis, während der letzte den Befehl „if goto“ ausführt, der die Anweisung abschließt.
FLEQ: Ein flexiblerer aufmerksamkeitsbasierter Computer
In diesem Abschnitt stellt der Autor FLEQ vor, eine Weiterentwicklung von SUBLEQ und definiert einen flexibleren Computer mit reduziertem Befehlssatz. Dieser implizite zusätzliche Befehlssatz basiert auf einer weiterentwickelten Version von SUBLEQ und ermöglicht die Implementierung mehrerer Funktionen im selben Transformer-Netzwerk. Die Autoren verwenden den Begriff FLEQ, um sich auf die Anweisungen, die Sprache und die aufmerksamkeitsbasierten Computer zu beziehen, die er definiert.
FLEQ wurde entwickelt, um die Implementierung komplexer Algorithmen wie Matrixmultiplikation, Quadratwurzelberechnungen, Aktivierungsfunktionen usw. zu ermöglichen, indem Funktionen generiert werden, die allgemeiner sind als einfache Subtraktion.
Computerausführungszyklus basierend auf Aufmerksamkeit. Bei jeder Iteration des Schleifentransformators wird basierend auf dem Programmzähler eine Anweisung aus dem Befehlssatz in der Eingabe abgerufen. Die Anweisung wird dann in den Notizblock kopiert. Abhängig von der zu implementierenden Funktion werden unterschiedliche Funktionsblockspeicherorte verwendet, um die Ergebnisse der Funktion lokal aufzuzeichnen. Sobald das Ergebnis berechnet ist, wird es zurück an den angegebenen Speicherort kopiert, der von der Anweisung bereitgestellt wird.
Der Ausführungszyklus ähnelt dem Single Instruction Set Computer (OISC) im vorherigen Abschnitt. Der Hauptunterschied besteht darin, dass Sie für jede Anweisung aus einer Liste vorgewählter Funktionen auswählen können, die als beliebige Eingabe eingegeben werden Array, wie Matrizen, Vektoren und Skalare.
Geben Sie das Format der Sequenz ein. Wie in Abbildung 6 dargestellt, kann der Eingang X des Schleifentransformators ein Programm ausführen, das aus einer Reihe von FLEQ-Anweisungen besteht (X besteht aus drei Teilen: temporäres Register, Speicher und Anweisungen).
Format von Funktionsblöcken basierend auf Transformer. Jeder Funktionsblock befindet sich im unteren linken Teil von Eingang X, wie in Abbildung 6 dargestellt.

Abbildung 6: Struktur der Eingabe
Das obige ist der detaillierte Inhalt vonWenn Transformer als Allzweckcomputer verwendet wird, kann er auch kontextbezogene Lernalgorithmen ausführen. Diese Forschung ist sehr einfallsreich.. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Der Artikel von StableDiffusion3 ist endlich da! Dieses Modell wurde vor zwei Wochen veröffentlicht und verwendet die gleiche DiT-Architektur (DiffusionTransformer) wie Sora. Nach seiner Veröffentlichung sorgte es für großes Aufsehen. Im Vergleich zur Vorgängerversion wurde die Qualität der von StableDiffusion3 generierten Bilder erheblich verbessert. Es unterstützt jetzt Eingabeaufforderungen mit mehreren Themen, und der Textschreibeffekt wurde ebenfalls verbessert, und es werden keine verstümmelten Zeichen mehr angezeigt. StabilityAI wies darauf hin, dass es sich bei StableDiffusion3 um eine Reihe von Modellen mit Parametergrößen von 800 M bis 8 B handelt. Durch diesen Parameterbereich kann das Modell direkt auf vielen tragbaren Geräten ausgeführt werden, wodurch der Einsatz von KI deutlich reduziert wird
 Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Der erste Pilot- und Schlüsselartikel stellt hauptsächlich mehrere häufig verwendete Koordinatensysteme in der autonomen Fahrtechnologie vor und erläutert, wie die Korrelation und Konvertierung zwischen ihnen abgeschlossen und schließlich ein einheitliches Umgebungsmodell erstellt werden kann. Der Schwerpunkt liegt hier auf dem Verständnis der Umrechnung vom Fahrzeug in den starren Kamerakörper (externe Parameter), der Kamera-in-Bild-Konvertierung (interne Parameter) und der Bild-in-Pixel-Einheitenkonvertierung. Die Konvertierung von 3D in 2D führt zu entsprechenden Verzerrungen, Verschiebungen usw. Wichtige Punkte: Das Fahrzeugkoordinatensystem und das Kamerakörperkoordinatensystem müssen neu geschrieben werden: Das Ebenenkoordinatensystem und das Pixelkoordinatensystem. Schwierigkeit: Sowohl die Entzerrung als auch die Verzerrungsaddition müssen auf der Bildebene kompensiert werden. 2. Einführung Insgesamt gibt es vier visuelle Systeme Koordinatensystem: Pixelebenenkoordinatensystem (u, v), Bildkoordinatensystem (x, y), Kamerakoordinatensystem () und Weltkoordinatensystem (). Es gibt eine Beziehung zwischen jedem Koordinatensystem,
 Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Die Trajektorienvorhersage spielt eine wichtige Rolle beim autonomen Fahren. Unter autonomer Fahrtrajektorienvorhersage versteht man die Vorhersage der zukünftigen Fahrtrajektorie des Fahrzeugs durch die Analyse verschiedener Daten während des Fahrvorgangs. Als Kernmodul des autonomen Fahrens ist die Qualität der Trajektorienvorhersage von entscheidender Bedeutung für die nachgelagerte Planungssteuerung. Die Trajektorienvorhersageaufgabe verfügt über einen umfangreichen Technologie-Stack und erfordert Vertrautheit mit der dynamischen/statischen Wahrnehmung des autonomen Fahrens, hochpräzisen Karten, Fahrspurlinien, Fähigkeiten in der neuronalen Netzwerkarchitektur (CNN&GNN&Transformer) usw. Der Einstieg ist sehr schwierig! Viele Fans hoffen, so schnell wie möglich mit der Flugbahnvorhersage beginnen zu können und Fallstricke zu vermeiden. Heute werde ich eine Bestandsaufnahme einiger häufiger Probleme und einführender Lernmethoden für die Flugbahnvorhersage machen! Einführungsbezogenes Wissen 1. Sind die Vorschaupapiere in Ordnung? A: Schauen Sie sich zuerst die Umfrage an, S
 DualBEV: BEVFormer und BEVDet4D deutlich übertreffen, öffnen Sie das Buch!
Mar 21, 2024 pm 05:21 PM
DualBEV: BEVFormer und BEVDet4D deutlich übertreffen, öffnen Sie das Buch!
Mar 21, 2024 pm 05:21 PM
In diesem Artikel wird das Problem der genauen Erkennung von Objekten aus verschiedenen Blickwinkeln (z. B. Perspektive und Vogelperspektive) beim autonomen Fahren untersucht, insbesondere wie die Transformation von Merkmalen aus der Perspektive (PV) in den Raum aus der Vogelperspektive (BEV) effektiv ist implementiert über das Modul Visual Transformation (VT). Bestehende Methoden lassen sich grob in zwei Strategien unterteilen: 2D-zu-3D- und 3D-zu-2D-Konvertierung. 2D-zu-3D-Methoden verbessern dichte 2D-Merkmale durch die Vorhersage von Tiefenwahrscheinlichkeiten, aber die inhärente Unsicherheit von Tiefenvorhersagen, insbesondere in entfernten Regionen, kann zu Ungenauigkeiten führen. Während 3D-zu-2D-Methoden normalerweise 3D-Abfragen verwenden, um 2D-Features abzutasten und die Aufmerksamkeitsgewichte der Korrespondenz zwischen 3D- und 2D-Features über einen Transformer zu lernen, erhöht sich die Rechen- und Bereitstellungszeit.
 Das erste Weltmodell zur Erzeugung autonomer Fahrszenen mit mehreren Ansichten | DrivingDiffusion: Neue Ideen für BEV-Daten und Simulation
Oct 23, 2023 am 11:13 AM
Das erste Weltmodell zur Erzeugung autonomer Fahrszenen mit mehreren Ansichten | DrivingDiffusion: Neue Ideen für BEV-Daten und Simulation
Oct 23, 2023 am 11:13 AM
Einige persönliche Gedanken des Autors Im Bereich des autonomen Fahrens sind mit der Entwicklung BEV-basierter Teilaufgaben/End-to-End-Lösungen hochwertige Multi-View-Trainingsdaten und der entsprechende Aufbau von Simulationsszenen immer wichtiger geworden. Als Reaktion auf die Schwachstellen aktueller Aufgaben kann „hohe Qualität“ in drei Aspekte zerlegt werden: Long-Tail-Szenarien in verschiedenen Dimensionen: z. B. Nahbereichsfahrzeuge in Hindernisdaten und präzise Kurswinkel beim Schneiden von Autos sowie Spurliniendaten . Szenen wie Kurven mit unterschiedlichen Krümmungen oder Rampen/Zusammenführungen/Zusammenführungen, die schwer zu erfassen sind. Diese basieren häufig auf der Sammlung großer Datenmengen und komplexen Data-Mining-Strategien, die kostspielig sind. Echter 3D-Wert – hochkonsistentes Bild: Die aktuelle BEV-Datenerfassung wird häufig durch Fehler bei der Sensorinstallation/-kalibrierung, hochpräzisen Karten und dem Rekonstruktionsalgorithmus selbst beeinträchtigt. das hat mich dazu geführt
 GSLAM |. Eine allgemeine SLAM-Architektur und ein Benchmark
Oct 20, 2023 am 11:37 AM
GSLAM |. Eine allgemeine SLAM-Architektur und ein Benchmark
Oct 20, 2023 am 11:37 AM
Plötzlich wurde ein 19 Jahre altes Papier namens GSLAM: A General SLAM Framework and Benchmark mit offenem Quellcode entdeckt: https://github.com/zdzhaoyong/GSLAM Gehen Sie direkt zum Volltext und spüren Sie die Qualität dieser Arbeit~1 Zusammenfassung der SLAM-Technologie hat in letzter Zeit viele Erfolge erzielt und die Aufmerksamkeit vieler High-Tech-Unternehmen auf sich gezogen. Es bleibt jedoch eine Frage, wie eine Schnittstelle zu bestehenden oder neuen Algorithmen hergestellt werden kann, um ein Benchmarking hinsichtlich Geschwindigkeit, Robustheit und Portabilität effizient durchzuführen. In diesem Artikel wird eine neue SLAM-Plattform namens GSLAM vorgeschlagen, die nicht nur Evaluierungsfunktionen bietet, sondern Forschern auch eine nützliche Möglichkeit bietet, schnell ihre eigenen SLAM-Systeme zu entwickeln.
 „Minecraft' verwandelt sich in eine KI-Stadt und NPC-Bewohner spielen Rollenspiele wie echte Menschen
Jan 02, 2024 pm 06:25 PM
„Minecraft' verwandelt sich in eine KI-Stadt und NPC-Bewohner spielen Rollenspiele wie echte Menschen
Jan 02, 2024 pm 06:25 PM
Bitte beachten Sie, dass dieser kantige Mann die Stirn runzelt und über die Identität der „ungebetenen Gäste“ vor ihm nachdenkt. Es stellte sich heraus, dass sie sich in einer gefährlichen Situation befand, und als ihr dies klar wurde, begann sie schnell mit der mentalen Suche nach einer Strategie zur Lösung des Problems. Letztendlich entschloss sie sich, vom Unfallort zu fliehen, dann so schnell wie möglich Hilfe zu suchen und sofort Maßnahmen zu ergreifen. Gleichzeitig dachte die Person auf der Gegenseite das Gleiche wie sie... In „Minecraft“ gab es eine solche Szene, in der alle Charaktere von künstlicher Intelligenz gesteuert wurden. Jeder von ihnen hat eine einzigartige Identität. Das zuvor erwähnte Mädchen ist beispielsweise eine 17-jährige, aber kluge und mutige Kurierin. Sie haben die Fähigkeit, sich zu erinnern und zu denken und in dieser kleinen Stadt in Minecraft wie Menschen zu leben. Was sie antreibt, ist ein brandneues,
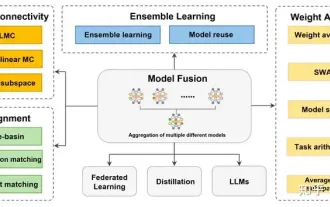 Rezension! Tiefe Modellfusion (LLM/Basismodell/Verbundlernen/Feinabstimmung usw.)
Apr 18, 2024 pm 09:43 PM
Rezension! Tiefe Modellfusion (LLM/Basismodell/Verbundlernen/Feinabstimmung usw.)
Apr 18, 2024 pm 09:43 PM
Am 23. September wurde das Papier „DeepModelFusion:ASurvey“ von der National University of Defense Technology, JD.com und dem Beijing Institute of Technology veröffentlicht. Deep Model Fusion/Merging ist eine neue Technologie, die die Parameter oder Vorhersagen mehrerer Deep-Learning-Modelle in einem einzigen Modell kombiniert. Es kombiniert die Fähigkeiten verschiedener Modelle, um die Verzerrungen und Fehler einzelner Modelle zu kompensieren und so eine bessere Leistung zu erzielen. Die tiefe Modellfusion bei groß angelegten Deep-Learning-Modellen (wie LLM und Basismodellen) steht vor einigen Herausforderungen, darunter hohe Rechenkosten, hochdimensionaler Parameterraum, Interferenzen zwischen verschiedenen heterogenen Modellen usw. Dieser Artikel unterteilt bestehende Methoden zur Tiefenmodellfusion in vier Kategorien: (1) „Musterverbindung“, die Lösungen im Gewichtsraum über einen verlustreduzierenden Pfad verbindet, um eine bessere anfängliche Modellfusion zu erzielen
