
 Technologie-Peripheriegeräte
KI
Umfassende Analyse der vier wichtigsten autonomen Fahrstrategien
Technologie-Peripheriegeräte
KI
Umfassende Analyse der vier wichtigsten autonomen Fahrstrategien
Umfassende Analyse der vier wichtigsten autonomen Fahrstrategien

Einführung
Die aktuelle Forschung zu autonomen Fahrstrategien konzentriert sich immer noch auf die Umsetzung spezifischer Strategien in bestimmten Szenarien. Forscher der Tsinghua-Universität haben auf der Top-Konferenz im Transportbereich einen umfassenden Bericht veröffentlicht und ihn aus einer fortgeschritteneren Perspektive analysiert Autonome Fahrstrategie.
Wenn ein selbstfahrendes Auto auf ein entgegenkommendes Fahrzeug trifft, sollte es zuerst vorbeifahren oder warten, bis es nachgibt?
Die Strategie des autonomen Fahrens ist seit jeher ein Kernthema in diesem Bereich, also wie autonome Fahrzeuge sinnvoll und effizient mit anderen Verkehrsteilnehmern in Verkehrskonfliktgebieten interagieren sollen.
Eine zu radikale oder zu konservative Strategie wird sich auf die Verkehrseffizienz auswirken und sogar die Lebenssicherheit der Passagiere gefährden.

Frühere Untersuchungen zu autonomen Fahrstrategien konzentrierten sich hauptsächlich auf detaillierte Fahrverhaltensweisen oder bestimmte Verkehrssituationen auf niedriger Ebene, d , und es mangelt derzeit an Forschung zu fortschrittlichen Fahrstrategien.
Obwohl Forscher ein zunehmendes Interesse an Fahrstrategien zeigen, gibt es noch keine umfassenden Antworten darauf, wie sicheres Fahren proaktiv umgesetzt werden kann.
Kürzlich wurden die Ergebnisse gemeinsamer Forschungen der Tsinghua-Universität, des Instituts für Automatisierung der Chinesischen Akademie der Wissenschaften und des Intel China Research Institute im jährlichen Seminar 2021 von Accident Analysis and Prevention, der führenden internationalen Fachzeitschrift auf dem Gebiet, vorgestellt Verkehrssicherheit (auf Platz 1 der SSCI-Zeitschrift im Transportbereich, JCR Q1) Auf dem Treffen wurden öffentliche Präsentationen und mündliche Berichte gehalten, und das Papier wurde mit dem jährlichen Preis für das beste Papier der Zeitschrift ausgezeichnet.

Papier-Link: https://www.sciencedirect.com/science/article/abs/pii/S0001457520317577#!
Nach der Analyse mehrerer repräsentativer Fahrstrategien schlug der Autor drei Paare charakteristischer Abmessungen vor, die wichtig sind bei der Messung der Fahrstrategie: bevorzugtes Ziel, Risikobereitschaft und Art der Zusammenarbeit.
Anhand dieser drei charakteristischen Dimensionen haben Forscher die bestehenden Fahrstrategien autonomer Fahrzeuge in vier Typen unterteilt: defensive Fahrstrategie, wettbewerbsfähige Fahrstrategie, ausgehandelte Fahrstrategie und kooperative Fahrstrategie, und diese vier Strategien verglichen. Es wird ein Vergleich durchgeführt und mögliche Richtungen ermittelt zur Verbesserung des Designs fortschrittlicher Fahrstrategien werden identifiziert.
Der Autor ist der Ansicht, dass angesichts des noch lange bestehenden gemischten Verkehrsflusses (selbstfahrende Autos und herkömmliche Autos) ein Vorfahrtsverhandlungsmechanismus aktiv eingeführt werden sollte, um den Widerspruch zwischen individuellen Absichten auszugleichen.
Der korrespondierende Autor des Artikels ist Dr. Li Zhiheng, der derzeit außerordentlicher Professor und Doktorvater an der Shenzhen Graduate School der Tsinghua-Universität ist. Erlangte 2009 einen Doktortitel in Ingenieurwissenschaften am Department of Automation, Department of Control Science and Engineering der Tsinghua University. Die Hauptforschungsrichtungen sind: intelligente Verkehrssysteme, Verkehrssignalsteuerungssysteme, Verkehrsmanagementplanung, intelligente öffentliche Verkehrssysteme, Big-Data-Forschung im intelligenten Verkehr usw. Gastgeber und Teilnahme an mehr als 10 Projekten auf nationaler Ebene.
Die Zukunft des autonomen Fahrens
In den letzten Jahren wurden große Hoffnungen in die autonome Fahrtechnologie gesetzt. Es wird allgemein angenommen, dass sie das Potenzial hat, den gesamten Bereich des Straßentransports neu zu gestalten und viele praktische Verkehrsprobleme, wie z. B. den Straßenverkehr, zu lösen Zugänglichkeit, Verkehrseffizienz, Komfort, insbesondere Sicherheit.
Allerdings entdecken immer mehr Forscher, dass es nicht einfach ist, selbstfahrenden Autos das „sichere Fahren“ beizubringen. Nehmen Sie als Beispiel eine Studie des US-Verkehrsministeriums aus dem Jahr 2010, die mehr als 2 Millionen Unfälle untersuchte und herausfand, dass Linksabbieger zwanzigmal häufiger zu Unfällen führen als Rechtsabbieger Im Bereich des autonomen Fahrens glaubt der Software-Ingenieur Nathaniel Fairfield, dass ungeschützte Linksabbieger zu den schwierigsten Dingen beim autonomen Fahren gehören. Professor John Leonard von der MIT-Abteilung für Maschinenbau gab auch zu, dass autonomes Fahren jeden Tag viele Herausforderungen mit sich bringt, und Linksabbieger stehen fast ganz oben auf der Problemliste.
Das Forschungsteam dieser Arbeit ist davon überzeugt, dass die wesentliche Ursache für Sicherheitsprobleme wie Linksabbiegeunfälle die Unterschiede in den Makrostrategien verschiedener Fahrzeuge bei der Interaktion sind. Anders als Mikrostrategien, die sich auf bestimmte Szenarien oder bestimmte Fahrverhaltensweisen konzentrieren, sind Makrostrategien eine Abstraktion typischer Elemente des Entscheidungsprozesses und werden durch die Hardwarebasis der autonomen Fahrstrategie und den Entscheidungsmechanismus bestimmt.
Daher wird in dieser Arbeit hauptsächlich diskutiert, welche Makrostrategien selbstfahrende Autos verfolgen sollten, um Kollisionsrisiken durch Fehleinschätzungen bei der Interaktion mit anderen Verkehrsteilnehmern zu vermeiden und Verkehrskonfliktgebiete geordnet zu passieren.
In dieser Arbeit schlug das Forschungsteam nach Durchsicht vorhandener Forschungsergebnisse zwei Hauptdimensionen zur Messung makroökonomischer Fahrstrategien vor:
- Bereitschaft zur Zusammenarbeit, das heißt, ob die Fahrperson bereit ist, im Austausch für Gesamtvorteile einen Teil aufzugeben Individuelle Interessen;
- Risikopräferenz, d. h. die Einstellung des Fahrsubjekts gegenüber den potenziellen Risiken, die die Fahrstrategie mit sich bringt.
Aufgrund der unterschiedlichen Gewichtung von Gesamtinteressen (ökologische Verkehrseffizienz etc.) und Einzelinteressen (Radgeschwindigkeit) lassen sich bestehende typische Fahrstrategien in zwei Kategorien einteilen: „konfrontatives Fahren“ und „kooperatives Fahren“.
Dabei werden konfrontative Fahrstrategien je nach Risikopräferenz weiter unterteilt in risikoscheue „defensive Fahrstrategien“, die Sicherheitsindikatoren bevorzugen, und risikoneutrale „Wettbewerbsfahrstrategien“, die Geschwindigkeitsindikatoren bevorzugen.
Die kooperative Fahrstrategie kann in eine „negative Fahrstrategie“, die nicht auf aktive Kommunikationsgeräte angewiesen ist, und eine „kooperative Fahrstrategie“, die auf aktiven Kommunikationsgeräten (Internet der Fahrzeuge, V2V usw.) beruht, unterteilt werden (Abbildung 1).
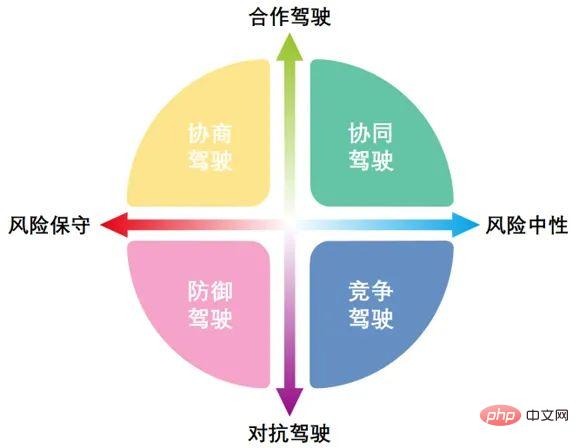
Abbildung 1: Vier Arten typischer Makro-Antriebsstrategien
In dieser Arbeit untersuchte das Forschungsteam den Betriebsmechanismus, die Kernaufgaben, die Interaktionslogik, den Entscheidungsmechanismus und die Hardwaregrundlage der oben genannten vier typische Fahrstrategien.
Konkret ist eine defensive Fahrstrategie definiert als: Annahme irrationaler Annahmen über andere Fahrzeuge (d. h. Annahme, dass die Wahrscheinlichkeit irrationalen Verhaltens hoch ist) und Festlegung, dass autonome Fahrzeuge unabhängige Entscheidungen treffen, mit dem Hauptzweck, ihre eigene Sicherheit zu gewährleisten. Strategie.
Wettbewerbsfähige Fahrstrategie ist definiert als: eine Fahrstrategie, die rationale Annahmen über andere Fahrzeuge annimmt (d. h. davon ausgeht, dass die Wahrscheinlichkeit irrationalen Verhaltens gering ist) und vorschreibt, dass autonome Fahrzeuge unabhängige Entscheidungen treffen, mit dem Hauptzweck, ihre eigene Effizienz zu verbessern .
Negative Fahrstrategie ist definiert als: Basierend auf dem Verständnis des traditionellen Fahrverhaltens führen autonome Fahrzeuge vernünftige Verhandlungen und gemeinsame Entscheidungen mit anderen Fahrzeugen im Austausch für eine Fahrstrategie, die sowohl Effizienz als auch Sicherheit berücksichtigt.
Kooperative Fahrstrategie ist definiert als: Mithilfe der Internet-of-Vehicles-Technologie kooperieren autonome Fahrzeuge mit anderen Fahrzeugen und akzeptieren einheitliche Versandanweisungen, um eine globale Optimierung zu erreichen.
Dann diskutierte das Team weiter die Vor- und Nachteile und Merkmale dieser vier Strategien.
Mit der Entwicklung der autonomen Fahrtechnologie in diesem Jahrhundert wurden erstmals defensive Fahrstrategien vorgeschlagen, da es viele Ähnlichkeiten zwischen dieser Fahrstrategie und menschlichen Fahrregeln gibt. Die Hauptziele bestehen darin, potenzielle Risiken zu beseitigen oder zu verringern.
Der größte Nachteil des defensiven Fahrens besteht jedoch darin, dass selbstfahrende Autos möglicherweise übermäßig redundant und konservativ sind, um Verkehrsunfälle mit geringer Wahrscheinlichkeit zu verhindern, was zu einer Verringerung der Verkehrseffizienz führt.
In der Originalversion des Responsibility Sensitive Safety (RSS)-Modells, das vom Intel Mobileye-Team [2] vorgeschlagen wurde, müssen selbstfahrende Autos beispielsweise einen ausreichenden Sicherheitsabstand einhalten, um das mögliche plötzliche Bremsverhalten von zu bewältigen jederzeit das vorausfahrende Auto (Abbildung 2).
Weitere Untersuchungen des Teams ergaben, dass selbstfahrende Autos unter Wahrung der Sicherheitsanforderungen den Folgeabstand um mehr als das Dreifache verkürzen können, wenn die Absichten des vorausfahrenden Fahrzeugs bei der Entscheidungsfindung berücksichtigt werden. Dies zeigt, dass nach Einführung der Interaktion auch eine verbesserte defensive Fahrweise für eine gewisse Verkehrseffizienz sorgen kann.
Relevante Forschungsergebnisse wurden auch öffentlich veröffentlicht und von Mobileye übernommen[3].
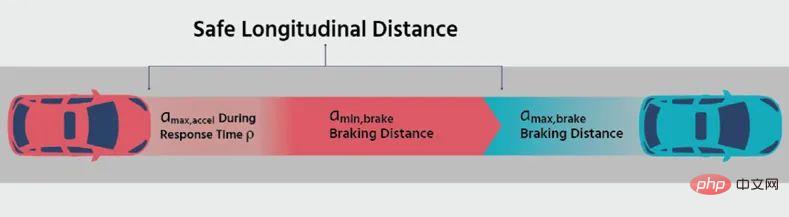
Abbildung 2: Die Bestimmungen zum Sicherheitsabstand in der von Mobileye veröffentlichten Originalversion des RSS [2]
Mit der Vertiefung der Forschung kamen nach und nach verschiedene Nachteile defensiver Fahrstrategien zum Vorschein, wie z. Terminplanung, Auswirkungen auf die Verkehrseffizienz usw.
Um diese Probleme zu lösen, wird das Konzept des „Lernens“ schrittweise in den Bereich des autonomen Fahrens eingeführt. Menschen versuchen, Maschinen beizubringen, Entscheidungen zwischen erwartetem Nutzen und potenziellen Risiken auf der Grundlage von Erfahrungen wie Menschen zu treffen.
Basierend auf dieser Idee entstand die wettbewerbsorientierte Fahrstrategie, die durch das MIT-Reinforcement-Learning-Modell Deep Traffic (Abbildung 3) dargestellt wird [4].
Geleitet von dieser Strategie betrachten autonome Fahrzeuge den Straßenverkehr als einen „nicht kooperativen dynamischen Spielprozess“ und suchen stets nach Möglichkeiten, die Fahreffizienz zu verbessern.
Allerdings ist es bei dieser Art von Fahrstrategie oft schwierig, zwei Probleme zu vermeiden:
1. Das durch Simulation verursachte Realismusproblem, nämlich die „Realitätslücke“. Diese Art von Fahrentscheidungsalgorithmus muss häufig in einem Simulationssystem ausgeführt werden, und der Trainingsprozess des Algorithmus hängt stark vom Umgebungsfeedback ab. Wie kann also sichergestellt werden, dass der Interaktionsprozess im Simulationssystem realistisch genug ist? Frage, die Forscher beantworten müssen;
2. Rationalität Potenzielle Risiken, die sich aus Annahmen ergeben, nehmen zu. Untersuchungen haben ergeben, dass selbstfahrende Autos mit fortschreitendem Training, da es weitaus mehr rationale als irrationale Individuen in der Simulationsumgebung gibt, riskante Verhaltensweisen „schmecken“ und zunehmend zu radikalem Fahrverhalten neigen können.[5] . Diese rationale Annahme kann zu Verkehrsstaus auf tatsächlichen Straßen führen.
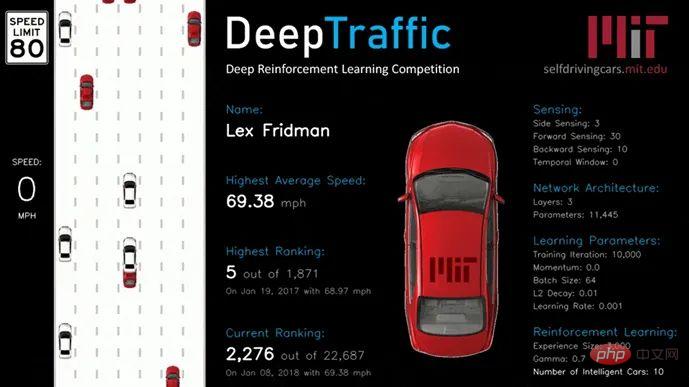
Abbildung 3: Deep Traffic-Fahrentscheidungsmodell des MIT [4] (Bildquelle: https://selfdrivingcars.mit.edu/deeptraffic)
Daher wurde das Konzept des ausgehandelten Fahrens und sein Vorschlag vorgeschlagen Es wird ein Vorfahrtsverhandlungsmechanismus eingeführt, um Konflikte zwischen einzelnen Absichten auszugleichen. Das Forschungsteam fasste die Grundsätze, denen autonome Fahrzeuge bei der Aushandlung von Wegerechten mit anderen Fahrzeugen folgen müssen, in drei Punkten zusammen (Abbildung 4) [6]:
- Es ist notwendig, mit den Einschränkungen der Wahrnehmung konservativ umzugehen.
- Es ist notwendig, die Interaktion zwischen Fahrzeugen (einschließlich impliziter Kommunikation und aktiver Kommunikation) in die Entscheidungsfindung einzubeziehen.
- Es ist notwendig, ein Gleichgewicht herzustellen Verkehrssicherheit und Verkehrseffizienz, d. h. Berücksichtigen Sie strategische Agilität.
Auf dieser Grundlage hat das Forschungsteam mehrere Arbeiten veröffentlicht, in denen erörtert wird, wie in verschiedenen typischen Verkehrsszenarien effektive Fahrentscheidungen auf der Grundlage von Vorfahrtsverhandlungen getroffen werden können [7].
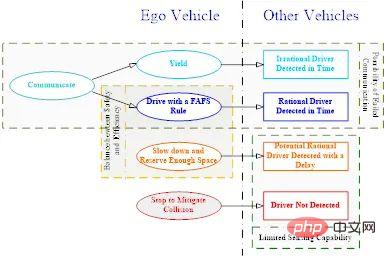
Abbildung 4: Drei Grundprinzipien, die beim sicheren Fahren hervorgehoben werden [6]
Allerdings ist das ausgehandelte Fahren durch die Menge an Kommunikationsinformationen begrenzt und hat noch nicht die maximale Auslastung der Straßenkapazität erreicht. Mit der Reife der aktiven Kommunikationstechnologie und der Entwicklung verteilter kollaborativer Entscheidungsmodelle in den letzten Jahren ist globales kollaboratives Fahren auf Basis des Internets der Fahrzeuge möglich geworden.
Die Grundannahme des kollaborativen Fahrens besteht darin, dass alle Straßenfahrzeuge ihre Statusinformationen an das zentrale Steuerungssystem melden und den vom System zur Bewegungssteuerung einheitlich vorgegebenen Manöverplan vollständig einhalten.
Unter dieser Annahme müssen autonome Fahrzeuge keine komplexen Flugbahnvorhersagen und Risikobewertungen mehr durchführen. Sie können Optimierungs- oder Suchmethoden verwenden, um die Nutzung von Straßenressourcen mit minimalen Rechenkosten zu maximieren (Abbildung 5) [8,9].

Abbildung 5: Vergleich der Verzögerung von 20 Fahrzeugen, die dieselbe Kreuzung mit unterschiedlichen Strategien passieren [9]
Aufzählung – aufzählungsbasierte globale optimale Lösung für kollaboratives Fahren (Latenz 315,06 s);
MCTS – basierend auf der Suche Die ungefähre optimale Lösung des kollaborativen Fahrens (Zeitverzögerung 316,18 s);
FIFO – die allgemeine Lösung des regelbasierten ausgehandelten Fahrens (Zeitverzögerung 382,54 s)
Die Realisierung des oben genannten kollaborativen Fahrens erfordert drei Voraussetzungen: auf der Fahrzeugseite , Automatisches Fahren muss abgeschlossen sein Fahren wird ersetzt und mit aktiver Kommunikationsausrüstung ausgestattet; Am Ende der Straße muss eine dichte intelligente Infrastruktur als Erfassungs- und Kommunikationsknoten, ein Kommunikationsnetzwerk mit geringer Latenz und hoher Parallelität bereitgestellt werden muss festgestellt werden.
Das bedeutet auch, dass kollaboratives Fahren kurzfristig scheitern wird. Wir müssen ernsthaft darüber nachdenken, wie wir der Realität des gemischten Fahrens von selbstfahrenden Autos und von Menschen gesteuerten Autos langfristig begegnen können.
Ein besorgniserregendes Problem ist, dass verschiedene Hersteller selbstfahrender Autos ihre eigenen Fahrstrategien haben. Dies kann dazu führen, dass einige selbstfahrende Autos die Strategien anderer Fahrzeuge aufgrund ihrer eigenen Strategien falsch einschätzen, was zu Unfällen führt. Daher fordern Forscher einen Konsens auf der Ebene der Fahrstrategie, um ein harmonischeres Fahren zu erreichen und die Fahrsicherheit zu verbessern.
Da sich das Niveau der maschinellen Intelligenz allmählich dem des Menschen annähert, wird die Frage, wie Maschinen in größerem Maßstab harmonisch mit Menschen koexistieren können, zu einer der wichtigsten wissenschaftlichen Fragen dieses Jahrhunderts.
Im von unserem Land veröffentlichten „Entwicklungsplan für künstliche Intelligenz der neuen Generation“ werden die Leitideologie, strategische Ziele und Schlüsselaufgaben für die Entwicklung der neuen Generation künstlicher Intelligenz meines Landes im Jahr 2030 vorgeschlagen. Unter ihnen ist künstliche Intelligenz für die Mensch-Maschine-Kollaboration eine wichtige Forschungsrichtung.
Autonomes Fahren ist ein repräsentatives Feld in der Entwicklung von Mensch-Maschine-Co-Driving auf Level 2-Level 5 und verschiedenen Fahrzeugkollaborationen auf Level-4-Level 5 Die Lösung dieser Probleme erfordert die Schnittstelle zwischen Verhaltensmodellierung, Mensch-Computer-Interaktion, Psychologie und anderen Disziplinen und erfordert mehr Aufmerksamkeit und Aufmerksamkeit.
Das obige ist der detaillierte Inhalt vonUmfassende Analyse der vier wichtigsten autonomen Fahrstrategien. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Oben geschrieben und persönliches Verständnis des Autors. Dreidimensionales Gaussplatting (3DGS) ist eine transformative Technologie, die in den letzten Jahren in den Bereichen explizite Strahlungsfelder und Computergrafik entstanden ist. Diese innovative Methode zeichnet sich durch die Verwendung von Millionen von 3D-Gaußkurven aus, was sich stark von der Neural Radiation Field (NeRF)-Methode unterscheidet, die hauptsächlich ein implizites koordinatenbasiertes Modell verwendet, um räumliche Koordinaten auf Pixelwerte abzubilden. Mit seiner expliziten Szenendarstellung und differenzierbaren Rendering-Algorithmen garantiert 3DGS nicht nur Echtzeit-Rendering-Fähigkeiten, sondern führt auch ein beispielloses Maß an Kontrolle und Szenenbearbeitung ein. Dies positioniert 3DGS als potenziellen Game-Changer für die 3D-Rekonstruktion und -Darstellung der nächsten Generation. Zu diesem Zweck geben wir erstmals einen systematischen Überblick über die neuesten Entwicklungen und Anliegen im Bereich 3DGS.
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
0. Vorab geschrieben&& Persönliches Verständnis, dass autonome Fahrsysteme auf fortschrittlichen Wahrnehmungs-, Entscheidungs- und Steuerungstechnologien beruhen, indem sie verschiedene Sensoren (wie Kameras, Lidar, Radar usw.) verwenden, um die Umgebung wahrzunehmen, und Algorithmen und Modelle verwenden für Echtzeitanalysen und Entscheidungsfindung. Dies ermöglicht es Fahrzeugen, Verkehrszeichen zu erkennen, andere Fahrzeuge zu erkennen und zu verfolgen, das Verhalten von Fußgängern vorherzusagen usw. und sich so sicher an komplexe Verkehrsumgebungen anzupassen. Diese Technologie erregt derzeit große Aufmerksamkeit und gilt als wichtiger Entwicklungsbereich für die Zukunft des Transportwesens . eins. Aber was autonomes Fahren schwierig macht, ist herauszufinden, wie man dem Auto klarmachen kann, was um es herum passiert. Dies erfordert, dass der dreidimensionale Objekterkennungsalgorithmus im autonomen Fahrsystem Objekte in der Umgebung, einschließlich ihrer Standorte, genau wahrnehmen und beschreiben kann.
 Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Der erste Pilot- und Schlüsselartikel stellt hauptsächlich mehrere häufig verwendete Koordinatensysteme in der autonomen Fahrtechnologie vor und erläutert, wie die Korrelation und Konvertierung zwischen ihnen abgeschlossen und schließlich ein einheitliches Umgebungsmodell erstellt werden kann. Der Schwerpunkt liegt hier auf dem Verständnis der Umrechnung vom Fahrzeug in den starren Kamerakörper (externe Parameter), der Kamera-in-Bild-Konvertierung (interne Parameter) und der Bild-in-Pixel-Einheitenkonvertierung. Die Konvertierung von 3D in 2D führt zu entsprechenden Verzerrungen, Verschiebungen usw. Wichtige Punkte: Das Fahrzeugkoordinatensystem und das Kamerakörperkoordinatensystem müssen neu geschrieben werden: Das Ebenenkoordinatensystem und das Pixelkoordinatensystem. Schwierigkeit: Sowohl die Entzerrung als auch die Verzerrungsaddition müssen auf der Bildebene kompensiert werden. 2. Einführung Insgesamt gibt es vier visuelle Systeme Koordinatensystem: Pixelebenenkoordinatensystem (u, v), Bildkoordinatensystem (x, y), Kamerakoordinatensystem () und Weltkoordinatensystem (). Es gibt eine Beziehung zwischen jedem Koordinatensystem,
 Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Die Trajektorienvorhersage spielt eine wichtige Rolle beim autonomen Fahren. Unter autonomer Fahrtrajektorienvorhersage versteht man die Vorhersage der zukünftigen Fahrtrajektorie des Fahrzeugs durch die Analyse verschiedener Daten während des Fahrvorgangs. Als Kernmodul des autonomen Fahrens ist die Qualität der Trajektorienvorhersage von entscheidender Bedeutung für die nachgelagerte Planungssteuerung. Die Trajektorienvorhersageaufgabe verfügt über einen umfangreichen Technologie-Stack und erfordert Vertrautheit mit der dynamischen/statischen Wahrnehmung des autonomen Fahrens, hochpräzisen Karten, Fahrspurlinien, Fähigkeiten in der neuronalen Netzwerkarchitektur (CNN&GNN&Transformer) usw. Der Einstieg ist sehr schwierig! Viele Fans hoffen, so schnell wie möglich mit der Flugbahnvorhersage beginnen zu können und Fallstricke zu vermeiden. Heute werde ich eine Bestandsaufnahme einiger häufiger Probleme und einführender Lernmethoden für die Flugbahnvorhersage machen! Einführungsbezogenes Wissen 1. Sind die Vorschaupapiere in Ordnung? A: Schauen Sie sich zuerst die Umfrage an, S
 SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
Originaltitel: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper-Link: https://arxiv.org/pdf/2402.02519.pdf Code-Link: https://github.com/HKUST-Aerial-Robotics/SIMPL Autor: Hong Kong University of Science und Technologie DJI-Papieridee: Dieses Papier schlägt eine einfache und effiziente Bewegungsvorhersagebasislinie (SIMPL) für autonome Fahrzeuge vor. Im Vergleich zum herkömmlichen Agent-Cent
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
