

Großartig, mit Python einen Weltrekord gebrochen zu haben!


Hallo zusammen,
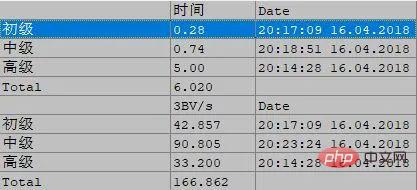
hat die automatische Minenräumung mit Python+OpenCV implementiert und den Weltrekord gebrochen. Schauen wir uns zunächst den Effekt an.
Mittel – 0,74 Sekunden 3BV/S=60,81
Ich glaube, viele Menschen kennen das klassische Spiel (Grafikkartentest) (Software) wie Minesweeper schon lange und viele haben davon gehört. Chinas Donnerheiliger ist auch der Topname von Guo Weijia, der bei der Minenräumung in China an erster Stelle und weltweit an zweiter Stelle steht. Als klassisches Spiel, das in der Windows 9x-Ära geboren wurde, hat Minesweeper auch heute noch seinen einzigartigen Charme: rasante und hochpräzise Mausbedienung, schnelle Reaktionsfähigkeiten und der Nervenkitzel, Rekorde aufzustellen all die Dinge, die Minesweeper zu bieten hat. Die einzigartige Spannung, die Minesweeper mit sich bringt, ist einzigartig für Minesweeper.
1. Vorbereitung
Bevor Sie sich auf die Erstellung einer Minensuchboot-Automatisierungssoftware vorbereiten, müssen Sie die folgenden Tools/Software/Umgebung vorbereiten
- Entwicklungsumgebung
- Python3-Umgebung – Empfohlen 3.6 oder höher [Anaconda3 wird von vielen empfohlen Abhängigkeiten unten Die Bibliothek muss nicht installiert werden]
- Numpy-abhängige Bibliothek [Keine Installation erforderlich, wenn Sie Anaconda haben]
- PIL-abhängige Bibliothek [Keine Installation erforderlich, wenn Sie Anaconda haben]
- opencv-python
- win32gui, Win32api-abhängige Bibliothek
- IDE, die Python unterstützt [kann wählen, wenn Sie die Verwendung eines Texteditors zum Schreiben von Programmen vertragen]
- Minesweeper-Software
· Minesweeper Arbiter (MS-Arbiter muss für Minesweeper verwendet werden!)
Okay , dann sind unsere Vorbereitungen abgeschlossen. Verstanden! Fangen wir an~
2. Umsetzungsideen
Was ist das Wichtigste, bevor man etwas tut? Es geht darum, in Ihrem Kopf Schritt für Schritt einen Rahmen für das zu schaffen, was Sie tun werden. Nur so können wir sicherstellen, dass der Prozess so durchdacht wie möglich ist, sodass am Ende ein gutes Ergebnis erzielt wird. Wenn wir Programme schreiben, sollten wir unser Bestes geben, um eine allgemeine Idee im Kopf zu haben, bevor wir offiziell mit der Entwicklung beginnen.
Für dieses Projekt ist der allgemeine Entwicklungsprozess wie folgt:
- Vervollständigen Sie den Teil zum Abfangen von Formularinhalten.
- Vervollständigen Sie den Teil zur Minenblocksegmentierung.
- Vervollständigen Sie den Teil zur Identifizierung des Minenblocktyps Okay, jetzt, da wir eine Idee haben, krempeln wir die Ärmel hoch und arbeiten hart!
- 1. Formularabfangen
class_name = "TMain"
title_name = "Minesweeper Arbiter "
Nach dem Login kopieren
class_name = "TMain" title_name = "Minesweeper Arbiter "
Die Hauptformularkategorie von ms_arbiter.exe ist „TMain“
Der Hauptformularname von ms_arbiter.exe ist „Minesweeper Arbiter“
- Haben Sie es bemerkt? ? Nach dem Namen des Hauptformulars steht ein Leerzeichen. Es war dieses Leerzeichen, das den Autor eine Zeit lang beunruhigte. Nur durch das Hinzufügen dieses Leerzeichens kann win32gui das Handle des Formulars normal erhalten.
- Dieses Projekt verwendet win32gui, um die Positionsinformationen des Formulars zu erhalten. Der spezifische Code lautet wie folgt:
hwnd = win32gui.FindWindow(class_name, title_name) if hwnd: left, top, right, bottom = win32gui.GetWindowRect(hwnd)
from PIL import ImageGrab
left += 15 top += 101 right -= 15 bottom -= 43 rect = (left, top, right, bottom) img = ImageGrab.grab().crop(rect)
Der orangefarbene Bereich ist das, was wir brauchen
Okay, wir haben das Bild des Schachbretts, der nächste Schritt besteht darin, die Bilder jedes Minenblocks zu segmentieren~
2. Segmentierung der Minenblöcke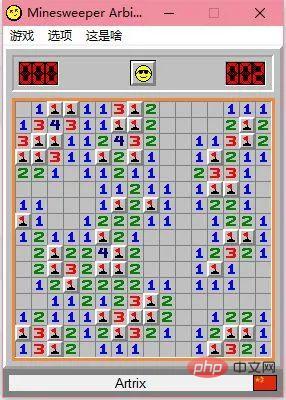
In Bearbeitung Vor der Blocksegmentierung müssen wir die Größe des Donnerblocks und seine Randgröße im Voraus kennen. Nach der Messung des Autors beträgt die Größe jedes Minenblocks unter ms_arbiter 16px * 16px.
Da wir die Größe des Donnerblocks kennen, können wir jeden Donnerblock zerschneiden. Zuerst müssen wir die Anzahl der Minenblöcke in horizontaler und vertikaler Richtung kennen. 
block_width, block_height = 16, 16 blocks_x = int((right - left) / block_width) blocks_y = int((bottom - top) / block_height)
def crop_block(hole_img, x, y): x1, y1 = x * block_width, y * block_height x2, y2 = x1 + block_width, y1 + block_height return hole_img.crop((x1, y1, x2, y2)) blocks_img = [[0 for i in range(blocks_y)] for i in range(blocks_x)] for y in range(blocks_y): for x in range(blocks_x): blocks_img[x][y] = crop_block(img, x, y)
3. 雷块识别
这一部分可能是整个项目里除了扫雷算法本身之外最重要的部分了。笔者在进行雷块检测的时候采用了比较简单的特征,高效并且可以满足要求。
def analyze_block(self, block, location): block = imageProcess.pil_to_cv(block) block_color = block[8, 8] x, y = location[0], location[1] # -1:Not opened # -2:Opened but blank # -3:Un initialized # Opened if self.equal(block_color, self.rgb_to_bgr((192, 192, 192))): if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))): self.blocks_num[x][y] = -2 self.is_started = True else: self.blocks_num[x][y] = -1 elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))): self.blocks_num[x][y] = 1 elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))): self.blocks_num[x][y] = 2 elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))): self.blocks_num[x][y] = 3 elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))): self.blocks_num[x][y] = 4 elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))): self.blocks_num[x][y] = 5 elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))): self.blocks_num[x][y] = 6 elif self.equal(block_color, self.rgb_to_bgr((0, 0, 0))): if self.equal(block[6, 6], self.rgb_to_bgr((255, 255, 255))): # Is mine self.blocks_num[x][y] = 9 elif self.equal(block[5, 8], self.rgb_to_bgr((255, 0, 0))): # Is flag self.blocks_num[x][y] = 0 else: self.blocks_num[x][y] = 7 elif self.equal(block_color, self.rgb_to_bgr((128, 128, 128))): self.blocks_num[x][y] = 8 else: self.blocks_num[x][y] = -3 self.is_mine_form = False if self.blocks_num[x][y] == -3 or not self.blocks_num[x][y] == -1: self.is_new_start = False
可以看到,我们采用了读取每个雷块的中心点像素的方式来判断雷块的类别,并且针对插旗、未点开、已点开但是空白等情况进行了进一步判断。具体色值是笔者直接取色得到的,并且屏幕截图的色彩也没有经过压缩,所以通过中心像素结合其他特征点来判断类别已经足够了,并且做到了高效率。
在本项目中,我们实现的时候采用了如下标注方式:
- 1-8:表示数字1到8
- 9:表示是地雷
- 0:表示插旗
- -1:表示未打开
- -2:表示打开但是空白
- -3:表示不是扫雷游戏中的任何方块类型
通过这种简单快速又有效的方式,我们成功实现了高效率的图像识别。
4. 扫雷算法实现
这可能是本篇文章最激动人心的部分了。在这里我们需要先说明一下具体的扫雷算法思路:
- 遍历每一个已经有数字的雷块,判断在它周围的九宫格内未被打开的雷块数量是否和本身数字相同,如果相同则表明周围九宫格内全部都是地雷,进行标记。
- 再次遍历每一个有数字的雷块,取九宫格范围内所有未被打开的雷块,去除已经被上一次遍历标记为地雷的雷块,记录并且点开。
- 如果以上方式无法继续进行,那么说明遇到了死局,选择在当前所有未打开的雷块中随机点击。(当然这个方法不是最优的,有更加优秀的解决方案,但是实现相对麻烦)
基本的扫雷流程就是这样,那么让我们来亲手实现它吧~
首先我们需要一个能够找出一个雷块的九宫格范围的所有方块位置的方法。因为扫雷游戏的特殊性,在棋盘的四边是没有九宫格的边缘部分的,所以我们需要筛选来排除掉可能超过边界的访问。
def generate_kernel(k, k_width, k_height, block_location): ls = [] loc_x, loc_y = block_location[0], block_location[1] for now_y in range(k_height): for now_x in range(k_width): if k[now_y][now_x]: rel_x, rel_y = now_x - 1, now_y - 1 ls.append((loc_y + rel_y, loc_x + rel_x)) return ls kernel_width, kernel_height = 3, 3 # Kernel mode:[Row][Col] kernel = [[1, 1, 1], [1, 1, 1], [1, 1, 1]] # Left border if x == 0: for i in range(kernel_height): kernel[i][0] = 0 # Right border if x == self.blocks_x - 1: for i in range(kernel_height): kernel[i][kernel_width - 1] = 0 # Top border if y == 0: for i in range(kernel_width): kernel[0][i] = 0 # Bottom border if y == self.blocks_y - 1: for i in range(kernel_width): kernel[kernel_height - 1][i] = 0 # Generate the search map to_visit = generate_kernel(kernel, kernel_width, kernel_height, location)
我们在这一部分通过检测当前雷块是否在棋盘的各个边缘来进行核的删除(在核中,1为保留,0为舍弃),之后通过generate_kernel函数来进行最终坐标的生成。
def count_unopen_blocks(blocks): count = 0 for single_block in blocks: if self.blocks_num[single_block[1]][single_block[0]] == -1: count += 1 return count def mark_as_mine(blocks): for single_block in blocks: if self.blocks_num[single_block[1]][single_block[0]] == -1: self.blocks_is_mine[single_block[1]][single_block[0]] = 1 unopen_blocks = count_unopen_blocks(to_visit) if unopen_blocks == self.blocks_num[x][y]: mark_as_mine(to_visit)
在完成核的生成之后,我们有了一个需要去检测的雷块“地址簿”:to_visit。之后,我们通过count_unopen_blocks函数来统计周围九宫格范围的未打开数量,并且和当前雷块的数字进行比对,如果相等则将所有九宫格内雷块通过mark_as_mine函数来标注为地雷。
def mark_to_click_block(blocks): for single_block in blocks: # Not Mine if not self.blocks_is_mine[single_block[1]][single_block[0]] == 1: # Click-able if self.blocks_num[single_block[1]][single_block[0]] == -1: # Source Syntax: [y][x] - Converted if not (single_block[1], single_block[0]) in self.next_steps: self.next_steps.append((single_block[1], single_block[0])) def count_mines(blocks): count = 0 for single_block in blocks: if self.blocks_is_mine[single_block[1]][single_block[0]] == 1: count += 1 return count mines_count = count_mines(to_visit) if mines_count == block: mark_to_click_block(to_visit)
扫雷流程中的第二步我们也采用了和第一步相近的方法来实现。先用和第一步完全一样的方法来生成需要访问的雷块的核,之后生成具体的雷块位置,通过count_mines函数来获取九宫格范围内所有雷块的数量,并且判断当前九宫格内所有雷块是否已经被检测出来。
如果是,则通过mark_to_click_block函数来排除九宫格内已经被标记为地雷的雷块,并且将剩余的安全雷块加入next_steps数组内。
# Analyze the number of blocks self.iterate_blocks_image(BoomMine.analyze_block) # Mark all mines self.iterate_blocks_number(BoomMine.detect_mine) # Calculate where to click self.iterate_blocks_number(BoomMine.detect_to_click_block) if self.is_in_form(mouseOperation.get_mouse_point()): for to_click in self.next_steps: on_screen_location = self.rel_loc_to_real(to_click) mouseOperation.mouse_move(on_screen_location[0], on_screen_location[1]) mouseOperation.mouse_click()
在最终的实现内,笔者将几个过程都封装成为了函数,并且可以通过iterate_blocks_number方法来对所有雷块都使用传入的函数来进行处理,这有点类似Python中Filter的作用。
之后笔者做的工作就是判断当前鼠标位置是否在棋盘之内,如果是,就会自动开始识别并且点击。具体的点击部分,笔者采用了作者为"wp"的一份代码(从互联网搜集而得),里面实现了基于win32api的窗体消息发送工作,进而完成了鼠标移动和点击的操作。具体实现封装在mouseOperation.py中,可以在查看完整代码:
https://www.php.cn/link/b8a6550662b363eb34145965d64d0cfb
Das obige ist der detaillierte Inhalt vonGroßartig, mit Python einen Weltrekord gebrochen zu haben!. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Wie kontrolliert PS -Federn die Weichheit des Übergangs?
Apr 06, 2025 pm 07:33 PM
Wie kontrolliert PS -Federn die Weichheit des Übergangs?
Apr 06, 2025 pm 07:33 PM
Der Schlüssel zur Federkontrolle liegt darin, seine allmähliche Natur zu verstehen. PS selbst bietet nicht die Möglichkeit, die Gradientenkurve direkt zu steuern, aber Sie können den Radius und die Gradientenweichheit flexius durch mehrere Federn, Matching -Masken und feine Selektionen anpassen, um einen natürlichen Übergangseffekt zu erzielen.
 So verwenden Sie MySQL nach der Installation
Apr 08, 2025 am 11:48 AM
So verwenden Sie MySQL nach der Installation
Apr 08, 2025 am 11:48 AM
Der Artikel führt den Betrieb der MySQL -Datenbank vor. Zunächst müssen Sie einen MySQL -Client wie MySQLworkBench oder Befehlszeilen -Client installieren. 1. Verwenden Sie den Befehl mySQL-uroot-P, um eine Verbindung zum Server herzustellen und sich mit dem Stammkonto-Passwort anzumelden. 2. Verwenden Sie die Erstellung von Createdatabase, um eine Datenbank zu erstellen, und verwenden Sie eine Datenbank aus. 3.. Verwenden Sie CreateTable, um eine Tabelle zu erstellen, Felder und Datentypen zu definieren. 4. Verwenden Sie InsertInto, um Daten einzulegen, Daten abzufragen, Daten nach Aktualisierung zu aktualisieren und Daten nach Löschen zu löschen. Nur indem Sie diese Schritte beherrschen, lernen, mit gemeinsamen Problemen umzugehen und die Datenbankleistung zu optimieren, können Sie MySQL effizient verwenden.
 Muss MySQL bezahlen?
Apr 08, 2025 pm 05:36 PM
Muss MySQL bezahlen?
Apr 08, 2025 pm 05:36 PM
MySQL hat eine kostenlose Community -Version und eine kostenpflichtige Enterprise -Version. Die Community -Version kann kostenlos verwendet und geändert werden, die Unterstützung ist jedoch begrenzt und für Anwendungen mit geringen Stabilitätsanforderungen und starken technischen Funktionen geeignet. Die Enterprise Edition bietet umfassende kommerzielle Unterstützung für Anwendungen, die eine stabile, zuverlässige Hochleistungsdatenbank erfordern und bereit sind, Unterstützung zu bezahlen. Zu den Faktoren, die bei der Auswahl einer Version berücksichtigt werden, gehören Kritikalität, Budgetierung und technische Fähigkeiten von Anwendungen. Es gibt keine perfekte Option, nur die am besten geeignete Option, und Sie müssen die spezifische Situation sorgfältig auswählen.
 Wie richte ich PS -Federn ein?
Apr 06, 2025 pm 07:36 PM
Wie richte ich PS -Federn ein?
Apr 06, 2025 pm 07:36 PM
PS Federn ist ein Bildkantenschwärcheneffekt, der durch den gewichteten Durchschnitt der Pixel im Randbereich erreicht wird. Das Einstellen des Federradius kann den Grad der Unschärfe steuern und je größer der Wert ist, desto unscharfer ist er. Eine flexible Einstellung des Radius kann den Effekt entsprechend den Bildern und Bedürfnissen optimieren. Verwenden Sie beispielsweise einen kleineren Radius, um Details bei der Verarbeitung von Charakterfotos zu erhalten und einen größeren Radius zu verwenden, um ein dunstiges Gefühl bei der Verarbeitung von Kunst zu erzeugen. Es ist jedoch zu beachten, dass zu groß der Radius leicht an Kantendetails verlieren kann, und zu klein ist der Effekt nicht offensichtlich. Der Federneffekt wird von der Bildauflösung beeinflusst und muss anhand des Bildverständnisses und des Griffs von Effekten angepasst werden.
 Welchen Einfluss hat PS -Federn auf die Bildqualität?
Apr 06, 2025 pm 07:21 PM
Welchen Einfluss hat PS -Federn auf die Bildqualität?
Apr 06, 2025 pm 07:21 PM
PS -Federn kann zu einem Verlust von Bilddetails, einer verringerten Farbsättigung und einem erhöhten Rauschen führen. Um den Aufprall zu verringern, wird empfohlen, einen kleineren Federradius zu verwenden, die Ebene und dann die Feder zu kopieren und die Bildqualität vor und nach der Federung vorsichtig zu vergleichen. Darüber hinaus ist die Federn für alle Fälle nicht geeignet, und manchmal sind Werkzeuge wie Masken besser zum Umgang mit Bildkanten geeignet.
 So optimieren Sie die Datenbankleistung nach der MySQL -Installation
Apr 08, 2025 am 11:36 AM
So optimieren Sie die Datenbankleistung nach der MySQL -Installation
Apr 08, 2025 am 11:36 AM
Die MySQL -Leistungsoptimierung muss von drei Aspekten beginnen: Installationskonfiguration, Indexierung und Abfrageoptimierung, Überwachung und Abstimmung. 1. Nach der Installation müssen Sie die my.cnf -Datei entsprechend der Serverkonfiguration anpassen, z. 2. Erstellen Sie einen geeigneten Index, um übermäßige Indizes zu vermeiden und Abfrageanweisungen zu optimieren, z. B. den Befehl Erklärung zur Analyse des Ausführungsplans; 3. Verwenden Sie das eigene Überwachungstool von MySQL (ShowProcessList, Showstatus), um die Datenbankgesundheit zu überwachen und die Datenbank regelmäßig zu sichern und zu organisieren. Nur durch kontinuierliche Optimierung dieser Schritte kann die Leistung der MySQL -Datenbank verbessert werden.
 Wie optimieren Sie die MySQL-Leistung für Hochlastanwendungen?
Apr 08, 2025 pm 06:03 PM
Wie optimieren Sie die MySQL-Leistung für Hochlastanwendungen?
Apr 08, 2025 pm 06:03 PM
Die MySQL-Datenbankleistung Optimierungshandbuch In ressourcenintensiven Anwendungen spielt die MySQL-Datenbank eine entscheidende Rolle und ist für die Verwaltung massiver Transaktionen verantwortlich. Mit der Erweiterung der Anwendung werden jedoch die Datenbankleistung Engpässe häufig zu einer Einschränkung. In diesem Artikel werden eine Reihe effektiver Strategien zur Leistungsoptimierung von MySQL -Leistung untersucht, um sicherzustellen, dass Ihre Anwendung unter hohen Lasten effizient und reaktionsschnell bleibt. Wir werden tatsächliche Fälle kombinieren, um eingehende Schlüsseltechnologien wie Indexierung, Abfrageoptimierung, Datenbankdesign und Caching zu erklären. 1. Das Design der Datenbankarchitektur und die optimierte Datenbankarchitektur sind der Eckpfeiler der MySQL -Leistungsoptimierung. Hier sind einige Kernprinzipien: Die Auswahl des richtigen Datentyps und die Auswahl des kleinsten Datentyps, der den Anforderungen entspricht, kann nicht nur Speicherplatz speichern, sondern auch die Datenverarbeitungsgeschwindigkeit verbessern.
 MySQL -Installationsfehlerlösung
Apr 08, 2025 am 10:48 AM
MySQL -Installationsfehlerlösung
Apr 08, 2025 am 10:48 AM
Häufige Gründe und Lösungen für MySQL -Installationsfehler: 1. Falsch Benutzername oder Passwort, oder der MySQL -Dienst wird nicht gestartet. Sie müssen den Benutzernamen und das Passwort überprüfen und den Dienst starten. 2. Portkonflikte müssen Sie den MySQL -Höranschluss ändern oder das Programm schließen, das Port 3306 besetzt. 3. Die Abhängigkeitsbibliothek fehlt, Sie müssen den Systempaket -Manager verwenden, um die erforderliche Abhängigkeitsbibliothek zu installieren. V. 5. Falsche Konfigurationsdatei müssen die Konfigurationsdatei von My.cnf überprüfen, um sicherzustellen, dass die Konfiguration korrekt ist. Nur wenn MySQL stetig und sorgfältig überprüft wird, können MySQL reibungslos installiert werden.
