
 Technologie-Peripheriegeräte
KI
Universeller Fear-Shot-Lerner: eine Lösung für eine Vielzahl dichter Vorhersageaufgaben
Technologie-Peripheriegeräte
KI
Universeller Fear-Shot-Lerner: eine Lösung für eine Vielzahl dichter Vorhersageaufgaben
Universeller Fear-Shot-Lerner: eine Lösung für eine Vielzahl dichter Vorhersageaufgaben

ICLR (International Conference on Learning Representations) gilt als eine der einflussreichsten internationalen akademischen Konferenzen zum Thema maschinelles Lernen.
Auf der diesjährigen ICLR 2023-Konferenz veröffentlichte Microsoft Research Asia die neuesten Forschungsergebnisse in den Bereichen Robustheit des maschinellen Lernens, verantwortungsvolle künstliche Intelligenz und anderen Bereichen.
Unter anderem wurden die Ergebnisse der wissenschaftlichen Forschungskooperation zwischen Microsoft Research Asia und dem Korea Advanced Institute of Science and Technology (KAIST) im Rahmen der akademischen Zusammenarbeit beider Parteien für ihre herausragende Klarheit, Einsicht, Kreativität und Auszeichnung mit dem ICLR 2023 Outstanding ausgezeichnet potenziell nachhaltige Wirkung.
Papieradresse: https://arxiv.org/abs/2303.14969
VTM: Der erste Lernende mit wenigen Stichproben, der an alle dichten Vorhersageaufgaben angepasst ist Wichtige Aufgabenklasse in diesem Bereich, wie semantische Segmentierung, Tiefenschätzung, Kantenerkennung und Schlüsselpunkterkennung usw. Für solche Aufgaben ist die manuelle Annotation von Beschriftungen auf Pixelebene mit unerschwinglich hohen Kosten verbunden. Daher ist die Frage, wie man aus einer kleinen Menge gekennzeichneter Daten lernt und genaue Vorhersagen trifft, d. h. das Lernen kleiner Stichproben, ein Thema von großer Bedeutung in diesem Bereich. In den letzten Jahren hat die Forschung zum Lernen kleiner Stichproben weiterhin Durchbrüche erzielt, insbesondere einige Methoden, die auf Meta-Lernen und kontradiktorischem Lernen basieren und in der akademischen Gemeinschaft große Aufmerksamkeit und Zustimmung gefunden haben.
Bestehende Computer Vision-Lernmethoden für kleine Stichproben zielen jedoch im Allgemeinen auf eine bestimmte Art von Aufgaben ab, z. B. Klassifizierungsaufgaben oder semantische Segmentierungsaufgaben. Beim Entwurf der Modellarchitektur und des Trainingsprozesses nutzen sie häufig Vorkenntnisse und spezifische Annahmen für diese Aufgaben und eignen sich daher nicht für die Verallgemeinerung auf Vorhersageaufgaben mit beliebiger Dichte. Forscher von Microsoft Research Asia wollten einer Kernfrage nachgehen: Gibt es einen allgemeinen Few-Shot-Lerner, der dichte Vorhersageaufgaben für beliebige Segmente unsichtbarer Bilder aus einer kleinen Anzahl beschrifteter Bilder lernen kann?
Das Ziel einer dichten Vorhersageaufgabe besteht darin, eine Zuordnung von Eingabebildern zu in Pixeln annotierten Beschriftungen zu lernen, die wie folgt definiert werden kann:
 wobei H und B die Höhe und Breite des Bildes sind Das Eingabebild enthält im Allgemeinen drei RGB-Kanäle, und C_Τ stellt die Anzahl der Ausgabekanäle dar. Unterschiedliche dichte Vorhersageaufgaben können unterschiedliche Ausgabekanalnummern und Kanalattribute beinhalten. Beispielsweise ist die Ausgabe einer semantischen Segmentierungsaufgabe ein mehrkanaliger binärer Wert, während die Ausgabe einer Tiefenschätzungsaufgabe ein einkanaliger kontinuierlicher Wert ist. Ein allgemeiner Lernender mit wenigen Stichproben F kann für jede dieser Aufgaben Τ bei gegebener kleiner Anzahl beschrifteter Stichprobenunterstützungssätze S_Τ (einschließlich N Gruppen von Stichproben X^i und Beschriftungen Y^i) lernen, die Bildarchitektur ungesehen abzufragen. Diese Struktur ist in der Lage, beliebig dichte Vorhersageaufgaben zu bewältigen und teilt die Parameter, die für die meisten Aufgaben erforderlich sind, um verallgemeinerbares Wissen zu erhalten, wodurch das Lernen jeder unbekannten Aufgabe mit einer kleinen Anzahl von Stichproben ermöglicht wird.
wobei H und B die Höhe und Breite des Bildes sind Das Eingabebild enthält im Allgemeinen drei RGB-Kanäle, und C_Τ stellt die Anzahl der Ausgabekanäle dar. Unterschiedliche dichte Vorhersageaufgaben können unterschiedliche Ausgabekanalnummern und Kanalattribute beinhalten. Beispielsweise ist die Ausgabe einer semantischen Segmentierungsaufgabe ein mehrkanaliger binärer Wert, während die Ausgabe einer Tiefenschätzungsaufgabe ein einkanaliger kontinuierlicher Wert ist. Ein allgemeiner Lernender mit wenigen Stichproben F kann für jede dieser Aufgaben Τ bei gegebener kleiner Anzahl beschrifteter Stichprobenunterstützungssätze S_Τ (einschließlich N Gruppen von Stichproben X^i und Beschriftungen Y^i) lernen, die Bildarchitektur ungesehen abzufragen. Diese Struktur ist in der Lage, beliebig dichte Vorhersageaufgaben zu bewältigen und teilt die Parameter, die für die meisten Aufgaben erforderlich sind, um verallgemeinerbares Wissen zu erhalten, wodurch das Lernen jeder unbekannten Aufgabe mit einer kleinen Anzahl von Stichproben ermöglicht wird.
Zweitens sollte der Lernende seinen Vorhersagemechanismus flexibel anpassen, um unbekannte Aufgaben mit unterschiedlicher Semantik zu lösen und gleichzeitig effizient genug zu sein, um eine Überanpassung zu verhindern.

Daher haben Forscher von Microsoft Research Asia das visuelle Token-Matching für Lernende in kleinen Stichproben VTM (Visual Token Matching) entworfen und implementiert, das für jede dichte Vorhersageaufgabe verwendet werden kann. Dies ist der erste Lernende für kleine Stichproben, der an alle intensiven Vorhersageaufgaben angepasst ist. VTM eröffnet eine neue Denkweise für die Verarbeitung intensiver Vorhersageaufgaben und Lernmethoden für kleine Stichproben in der Computer Vision. Diese Arbeit wurde mit dem
ICLR 2023 Outstanding Paper Award- ausgezeichnet.
Das Design von VTM ist von der Analogie zum menschlichen Denkprozess inspiriert: Bei einer kleinen Anzahl von Beispielen einer neuen Aufgabe können Menschen basierend auf der Ähnlichkeit zwischen den Beispielen schnell ähnliche Ausgaben ähnlichen Eingaben zuordnen und auch ähnliche Ausgaben zuweisen auf ähnliche Eingaben basierend auf der Ähnlichkeit zwischen den Beispielen. Der Kontext hängt davon ab, auf welchen Ebenen die Eingabe und die Ausgabe ähnlich sind. Die Forscher implementierten einen Analogieprozess für eine dichte Vorhersage mithilfe eines nichtparametrischen Matchings basierend auf Patch-Levels. Durch Training wird das Modell dazu inspiriert, Ähnlichkeiten in Bildfeldern zu erfassen.
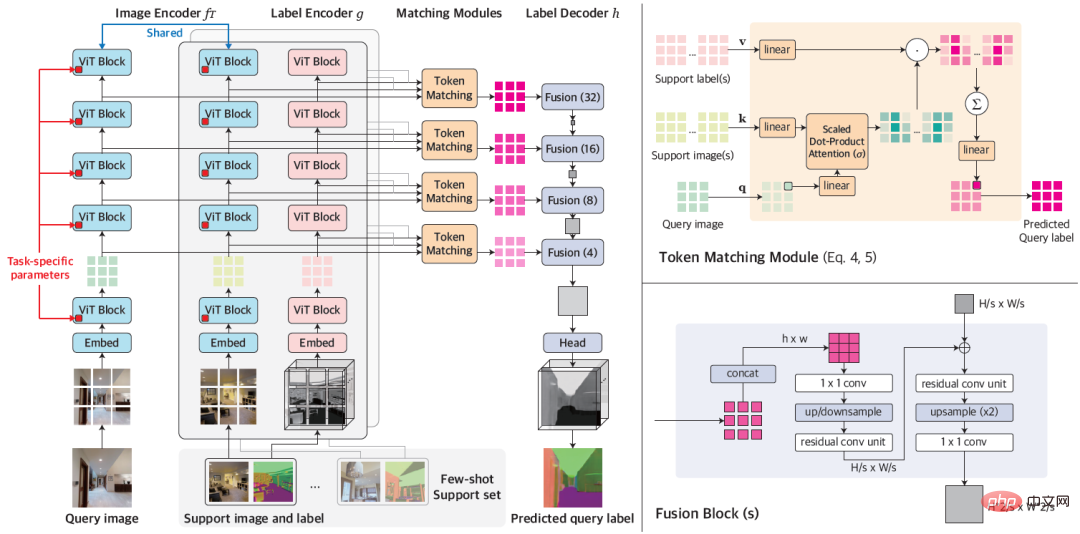
Angesichts einer kleinen Anzahl beschrifteter Beispiele für eine neue Aufgabe passt VTM zunächst sein Verständnis der Ähnlichkeit basierend auf dem gegebenen Beispiel und der Beschriftung des Beispiels an und sperrt Bildfelder von den Beispielbildfeldern, die dem Bild ähnlich sind vorherzusagender Patch: Sagen Sie die Beschriftungen unsichtbarer Bildfelder vorher, indem Sie deren Beschriftungen kombinieren. Abbildung 1: Gesamtarchitektur von VTM Es besteht hauptsächlich aus vier Modulen, nämlich dem Bildkodierer f_Τ, dem Etikettenkodierer g, dem passenden Modul und dem Etikettendekodierer h. Bei einem Abfragebild und einem Supportsatz extrahiert der Bildencoder zunächst Bild-Patch-Level-Darstellungen für jede Abfrage und jedes Supportbild unabhängig voneinander. Der Tag-Encoder extrahiert auf ähnliche Weise jedes Tag, das Tags unterstützt. Angesichts der Beschriftungen auf jeder Ebene führt das Matching-Modul einen nichtparametrischen Abgleich durch und der Label-Decoder leitet schließlich die Beschriftung des Abfragebilds ab.
 Die Essenz von VTM ist eine Meta-Lernmethode. Das Training besteht aus mehreren Episoden, wobei jede Episode ein kleines Beispiel-Lernproblem simuliert. Das VTM-Training verwendet den Meta-Trainingsdatensatz D_train, der eine Vielzahl beschrifteter Beispiele für dichte Vorhersageaufgaben enthält. In jeder Trainingsepisode wird ein Lernszenario mit wenigen Schüssen für eine bestimmte Aufgabe T_train im Datensatz simuliert, mit dem Ziel, angesichts des Unterstützungssatzes die richtige Bezeichnung für das Abfragebild zu erstellen. Durch die Erfahrung des Lernens aus mehreren kleinen Stichproben kann das Modell allgemeines Wissen erlernen, um sich schnell und flexibel an neue Aufgaben anzupassen. Zum Testzeitpunkt muss das Modell für jede Aufgabe T_test, die nicht im Trainingsdatensatz D_train enthalten ist, ein Wenig-Schuss-Lernen durchführen.
Die Essenz von VTM ist eine Meta-Lernmethode. Das Training besteht aus mehreren Episoden, wobei jede Episode ein kleines Beispiel-Lernproblem simuliert. Das VTM-Training verwendet den Meta-Trainingsdatensatz D_train, der eine Vielzahl beschrifteter Beispiele für dichte Vorhersageaufgaben enthält. In jeder Trainingsepisode wird ein Lernszenario mit wenigen Schüssen für eine bestimmte Aufgabe T_train im Datensatz simuliert, mit dem Ziel, angesichts des Unterstützungssatzes die richtige Bezeichnung für das Abfragebild zu erstellen. Durch die Erfahrung des Lernens aus mehreren kleinen Stichproben kann das Modell allgemeines Wissen erlernen, um sich schnell und flexibel an neue Aufgaben anzupassen. Zum Testzeitpunkt muss das Modell für jede Aufgabe T_test, die nicht im Trainingsdatensatz D_train enthalten ist, ein Wenig-Schuss-Lernen durchführen. Da bei der Bearbeitung beliebiger Aufgaben die Ausgabedimension C_Τ jeder Aufgabe beim Metatraining und Testen unterschiedlich ist, wird es zu einer großen Herausforderung, einheitliche allgemeine Modellparameter für alle Aufgaben zu entwerfen. Um eine einfache und allgemeine Lösung bereitzustellen, transformierten die Forscher die Aufgabe in C_Τ-Einzelkanal-Unteraufgaben, lernten jeden Kanal separat und modellierten jede Unteraufgabe unabhängig mithilfe eines gemeinsamen Modells F.
Um VTM zu testen, haben die Forscher außerdem speziell eine Variante des Taskonomy-Datensatzes erstellt, um das Lernen kleiner Stichproben von unsichtbaren dichten Vorhersageaufgaben zu simulieren. Taskonomy enthält eine Vielzahl annotierter Innenbilder, aus denen die Forscher zehn dichte Vorhersageaufgaben mit unterschiedlicher Semantik und Ausgabedimensionen ausgewählt und diese zur Kreuzvalidierung in fünf Teile unterteilt haben. In jeder Aufteilung werden zwei Aufgaben für die Small-Shot-Bewertung (T_test) und die restlichen acht Aufgaben für das Training (T_train) verwendet. Die Forscher haben die Partitionen sorgfältig so konstruiert, dass sich die Trainings- und Testaufgaben ausreichend voneinander unterscheiden, beispielsweise durch die Gruppierung von Randaufgaben (TE, OE) in Testaufgaben, um die Bewertung von Aufgaben mit neuer Semantik zu ermöglichen.
Tabelle 1: Quantitativer Vergleich des Taskonomy-Datensatzes (Few-Shot-Basislinie) Nach Trainingsaufgaben von anderen Partitionen wurde 10-Shot-Lernen für die zu testende Partitionsaufgabe durchgeführt, bei der vollständig überwachte Basislinien trainiert wurden und auf jeder Falte (DPT) oder allen Faltungen (InvPT) ausgewertet
Tabelle 1 und Abbildung 2 veranschaulichen quantitativ und qualitativ die Lernleistung von VTM bei kleinen Stichproben und den beiden Arten von Basismodellen bei jeweils zehn dichten Vorhersageaufgaben. Unter ihnen sind DPT und InvPT die beiden fortschrittlichsten überwachten Lernmethoden, die für jede einzelne Aufgabe unabhängig trainiert werden können, während InvPT alle Aufgaben gemeinsam trainieren kann. Da es vor VTM keine dedizierte Methode für kleine Stichproben gab, die für allgemeine dichte Vorhersageaufgaben entwickelt wurde, verglichen die Forscher VTM mit drei hochmodernen Segmentierungsmethoden für kleine Stichproben, nämlich DGPNet, HSNet und VAT, und erweiterten sie, um allgemeine Aufgaben zu bewältigen Beschriften Sie Räume für dichte Vorhersageaufgaben. VTM hatte während des Trainings keinen Zugriff auf die Testaufgabe T_test und verwendete zum Testzeitpunkt nur eine kleine Anzahl (10) beschrifteter Bilder, schnitt jedoch unter allen Small-Shot-Basismodellen am besten ab und schnitt bei vielen Aufgaben im Vergleich zu vollständig gut ab überwachte Basismodelle.
Abbildung 2: Qualitativer Vergleich von Wenig-Schuss-Lernmethoden für eine neue Aufgabe mit nur zehn beschrifteten Bildern für die zehn dichten Vorhersageaufgaben von Taskonomy. Wo andere Methoden scheiterten, erlernte VTM erfolgreich alle neuen Aufgaben mit unterschiedlicher Semantik und unterschiedlichen Beschriftungsdarstellungen.
In Abbildung 2 sind über der gepunkteten Linie die tatsächlichen Beschriftungen und die beiden überwachten Lernmethoden DPT bzw. InvPT dargestellt. Unterhalb der gestrichelten Linie befindet sich die kleine Beispiel-Lernmethode. Bemerkenswerterweise erlitten andere Basislinien mit kleinen Stichproben eine katastrophale Unteranpassung bei neuen Aufgaben, während VTM alle Aufgaben erfolgreich lernte. Experimente zeigen, dass VTM jetzt mit vollständig überwachten Basislinien bei einer sehr kleinen Anzahl gekennzeichneter Beispiele eine ähnlich wettbewerbsfähige Leistung erbringen kann (
Zusammenfassend lässt sich sagen, dass die zugrunde liegende Idee von VTM zwar sehr einfach ist, es aber eine einheitliche Architektur hat, die für beliebig dichte Vorhersageaufgaben verwendet werden kann, da der Matching-Algorithmus im Wesentlichen alle Aufgaben und Labelstrukturen umfasst (z. B. kontinuierlich oder diskret). Darüber hinaus führt VTM nur eine kleine Anzahl aufgabenspezifischer Parameter ein, wodurch es resistent gegen Überanpassung und flexibel ist. In Zukunft hoffen die Forscher, die Auswirkungen von Aufgabentyp, Datenvolumen und Datenverteilung auf die Modellgeneralisierungsleistung während des Pre-Training-Prozesses weiter zu untersuchen und uns so dabei zu helfen, einen wirklich universellen Lernenden für kleine Stichproben zu entwickeln.
 Die Essenz von VTM ist eine Meta-Lernmethode. Das Training besteht aus mehreren Episoden, wobei jede Episode ein kleines Beispiel-Lernproblem simuliert. Das VTM-Training verwendet den Meta-Trainingsdatensatz D_train, der eine Vielzahl beschrifteter Beispiele für dichte Vorhersageaufgaben enthält. In jeder Trainingsepisode wird ein Lernszenario mit wenigen Schüssen für eine bestimmte Aufgabe T_train im Datensatz simuliert, mit dem Ziel, angesichts des Unterstützungssatzes die richtige Bezeichnung für das Abfragebild zu erstellen. Durch die Erfahrung des Lernens aus mehreren kleinen Stichproben kann das Modell allgemeines Wissen erlernen, um sich schnell und flexibel an neue Aufgaben anzupassen. Zum Testzeitpunkt muss das Modell für jede Aufgabe T_test, die nicht im Trainingsdatensatz D_train enthalten ist, ein Wenig-Schuss-Lernen durchführen.
Die Essenz von VTM ist eine Meta-Lernmethode. Das Training besteht aus mehreren Episoden, wobei jede Episode ein kleines Beispiel-Lernproblem simuliert. Das VTM-Training verwendet den Meta-Trainingsdatensatz D_train, der eine Vielzahl beschrifteter Beispiele für dichte Vorhersageaufgaben enthält. In jeder Trainingsepisode wird ein Lernszenario mit wenigen Schüssen für eine bestimmte Aufgabe T_train im Datensatz simuliert, mit dem Ziel, angesichts des Unterstützungssatzes die richtige Bezeichnung für das Abfragebild zu erstellen. Durch die Erfahrung des Lernens aus mehreren kleinen Stichproben kann das Modell allgemeines Wissen erlernen, um sich schnell und flexibel an neue Aufgaben anzupassen. Zum Testzeitpunkt muss das Modell für jede Aufgabe T_test, die nicht im Trainingsdatensatz D_train enthalten ist, ein Wenig-Schuss-Lernen durchführen. 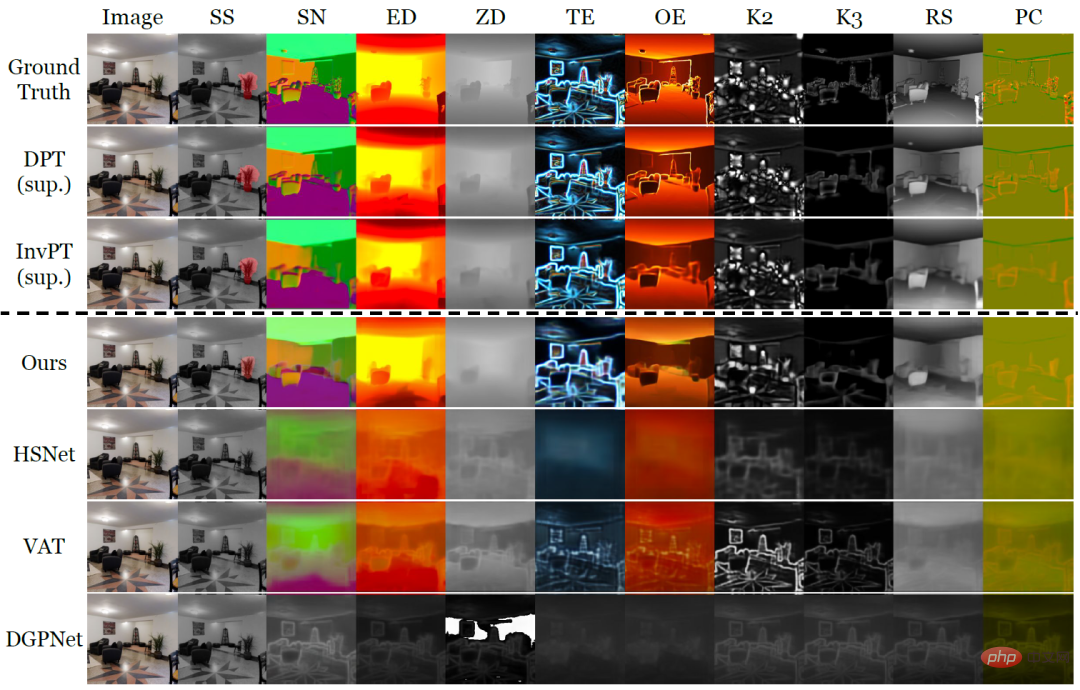
Das obige ist der detaillierte Inhalt vonUniverseller Fear-Shot-Lerner: eine Lösung für eine Vielzahl dichter Vorhersageaufgaben. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Die CSRankings National Computer Science Rankings 2024 sind veröffentlicht! CMU dominiert die Liste, MIT fällt aus den Top 5
Mar 25, 2024 pm 06:01 PM
Die CSRankings National Computer Science Rankings 2024 sind veröffentlicht! CMU dominiert die Liste, MIT fällt aus den Top 5
Mar 25, 2024 pm 06:01 PM
Die 2024CSRankings National Computer Science Major Rankings wurden gerade veröffentlicht! In diesem Jahr gehört die Carnegie Mellon University (CMU) im Ranking der besten CS-Universitäten in den Vereinigten Staaten zu den Besten des Landes und im Bereich CS, während die University of Illinois at Urbana-Champaign (UIUC) einen der besten Plätze belegt sechs Jahre in Folge den zweiten Platz belegt. Georgia Tech belegte den dritten Platz. Dann teilten sich die Stanford University, die University of California in San Diego, die University of Michigan und die University of Washington den vierten Platz weltweit. Es ist erwähnenswert, dass das Ranking des MIT zurückgegangen ist und aus den Top 5 herausgefallen ist. CSRankings ist ein globales Hochschulrankingprojekt im Bereich Informatik, das von Professor Emery Berger von der School of Computer and Information Sciences der University of Massachusetts Amherst initiiert wurde. Die Rangfolge erfolgt objektiv
 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI verändert tatsächlich die Mathematik. Vor kurzem hat Tao Zhexuan, der diesem Thema große Aufmerksamkeit gewidmet hat, die neueste Ausgabe des „Bulletin of the American Mathematical Society“ (Bulletin der American Mathematical Society) weitergeleitet. Zum Thema „Werden Maschinen die Mathematik verändern?“ äußerten viele Mathematiker ihre Meinung. Der gesamte Prozess war voller Funken, knallhart und aufregend. Der Autor verfügt über eine starke Besetzung, darunter der Fields-Medaillengewinner Akshay Venkatesh, der chinesische Mathematiker Zheng Lejun, der NYU-Informatiker Ernest Davis und viele andere bekannte Wissenschaftler der Branche. Die Welt der KI hat sich dramatisch verändert. Viele dieser Artikel wurden vor einem Jahr eingereicht.
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Die von Google geförderte Leistung von JAX hat in jüngsten Benchmark-Tests die von Pytorch und TensorFlow übertroffen und belegt bei 7 Indikatoren den ersten Platz. Und der Test wurde nicht auf der TPU mit der besten JAX-Leistung durchgeführt. Obwohl unter Entwicklern Pytorch immer noch beliebter ist als Tensorflow. Aber in Zukunft werden möglicherweise mehr große Modelle auf Basis der JAX-Plattform trainiert und ausgeführt. Modelle Kürzlich hat das Keras-Team drei Backends (TensorFlow, JAX, PyTorch) mit der nativen PyTorch-Implementierung und Keras2 mit TensorFlow verglichen. Zunächst wählen sie eine Reihe von Mainstream-Inhalten aus
 Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Das neueste Video von Teslas Roboter Optimus ist veröffentlicht und er kann bereits in der Fabrik arbeiten. Bei normaler Geschwindigkeit sortiert es Batterien (Teslas 4680-Batterien) so: Der Beamte hat auch veröffentlicht, wie es bei 20-facher Geschwindigkeit aussieht – auf einer kleinen „Workstation“, pflücken und pflücken und pflücken: Dieses Mal wird es freigegeben. Eines der Highlights Der Vorteil des Videos besteht darin, dass Optimus diese Arbeit in der Fabrik völlig autonom und ohne menschliches Eingreifen während des gesamten Prozesses erledigt. Und aus Sicht von Optimus kann es auch die krumme Batterie aufnehmen und platzieren, wobei der Schwerpunkt auf der automatischen Fehlerkorrektur liegt: In Bezug auf die Hand von Optimus gab der NVIDIA-Wissenschaftler Jim Fan eine hohe Bewertung ab: Die Hand von Optimus ist der fünffingrige Roboter der Welt am geschicktesten. Seine Hände sind nicht nur taktil
 FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
Die Zielerkennung ist ein relativ ausgereiftes Problem in autonomen Fahrsystemen, wobei die Fußgängererkennung einer der ersten Algorithmen ist, die eingesetzt werden. In den meisten Arbeiten wurde eine sehr umfassende Recherche durchgeführt. Die Entfernungswahrnehmung mithilfe von Fischaugenkameras für die Rundumsicht ist jedoch relativ wenig untersucht. Aufgrund der großen radialen Verzerrung ist es schwierig, die standardmäßige Bounding-Box-Darstellung in Fischaugenkameras zu implementieren. Um die obige Beschreibung zu vereinfachen, untersuchen wir erweiterte Begrenzungsrahmen-, Ellipsen- und allgemeine Polygondesigns in Polar-/Winkeldarstellungen und definieren eine mIOU-Metrik für die Instanzsegmentierung, um diese Darstellungen zu analysieren. Das vorgeschlagene Modell „fisheyeDetNet“ mit polygonaler Form übertrifft andere Modelle und erreicht gleichzeitig 49,5 % mAP auf dem Valeo-Fisheye-Kameradatensatz für autonomes Fahren
