
 Betrieb und Instandhaltung
Sicherheit
Anwendung vertrauenswürdiger Computertechnologie im Bereich des autonomen Fahrens
Betrieb und Instandhaltung
Sicherheit
Anwendung vertrauenswürdiger Computertechnologie im Bereich des autonomen Fahrens
Anwendung vertrauenswürdiger Computertechnologie im Bereich des autonomen Fahrens

Die Entwicklung der autonomen Fahrtechnologie ist zu einem der Hotspots in der Automobilindustrie geworden. Da sich immer mehr Autohersteller und Technologieunternehmen dem Kampf um autonomes Fahren anschließen, interessieren sich die Menschen zunehmend für das Potenzial und die Möglichkeiten der autonomen Fahrtechnologie. Allerdings gibt es bei der Entwicklung autonomer Fahrtechnologien noch einige Probleme und Herausforderungen, von denen die wichtigste möglicherweise Sicherheitsaspekte sind. Daher ist der Einsatz vertrauenswürdiger Computertechnologie zu einem Schlüssel zur Lösung dieses Problems geworden.
Trusted Computing-Technologie ist eine Technologie zum Schutz der Sicherheit, Privatsphäre und Datenintegrität von Computersystemen. Es schützt Computersysteme vor verschiedenen Bedrohungen und gewährleistet die Sicherheit und Zuverlässigkeit von Computersystemen durch die Schaffung einer vertrauenswürdigen Computerumgebung. Die Implementierung autonomer Fahrtechnologie erfordert die Verarbeitung großer Datenmengen sowie eine Entscheidungsfindung und Steuerung in Echtzeit. In diesem Prozess ist die Frage des Vertrauens am kritischsten. Der Einsatz vertrauenswürdiger Computertechnologie kann böswillige Angriffe im System reduzieren und die Sicherheit und Zuverlässigkeit autonomer Fahrsysteme verbessern.
Der Kern der Trusted-Computing-Technologie besteht darin, eine vertrauenswürdige Computing-Umgebung einzurichten. Diese Umgebung umfasst viele Aspekte wie Betriebssystem, Prozessor, Speicher, Speicher, Eingabe- und Ausgabegeräte usw. Durch die Überprüfung der Glaubwürdigkeit dieser Komponenten kann eine sichere und zuverlässige Computerumgebung geschaffen werden. In autonomen Fahrsystemen kann Trusted-Computing-Technologie auf viele Aspekte angewendet werden, beispielsweise auf Hardwaresicherheit, Softwaresicherheit, Kommunikationssicherheit usw.
In Bezug auf die Hardwaresicherheit müssen autonome Fahrsysteme über vertrauenswürdige Prozessoren verfügen, um sicherzustellen, dass das System keinen physischen Angriffen ausgesetzt ist. Mithilfe der auf Trusted Computing basierenden Prozessortechnologie kann der Prozessor sicher überwacht und geschützt werden, um böswillige Angriffe und Reverse Engineering zu verhindern. Gleichzeitig können Sensoren auch verifiziert und authentifiziert werden, um eine Manipulation oder Fälschung von Daten zu verhindern.
Im Hinblick auf die Softwaresicherheit müssen autonome Fahrsysteme die Sicherheit der Software und die Integrität des Codes gewährleisten. Durch den Einsatz vertrauenswürdiger Computertechnologie können dynamische Erkennung und Manipulationsschutz von Software realisiert werden, wodurch sichergestellt wird, dass der Systemcode nicht manipuliert wird oder bösartiger Code ausgeführt wird.
Im Hinblick auf die Kommunikationssicherheit müssen autonome Fahrsysteme zwischen Fahrzeugen kommunizieren, und dieser Prozess ist anfällig für Hackerangriffe. Mithilfe von Kommunikationssicherheitstechnologie, die auf Trusted-Computing-Technologie basiert, kann die Kommunikation verschlüsselt und authentifiziert werden, um zu verhindern, dass Daten gestohlen und manipuliert werden. Gleichzeitig kann das System auch aus der Ferne überwacht und verwaltet werden, um den Sicherheitsstatus des Systems in Echtzeit zu erkennen.
Generell kann der Einsatz von Trusted-Computing-Technologie im Bereich des autonomen Fahrens die Sicherheit und Zuverlässigkeit des Systems verbessern und wichtige Unterstützung für die Entwicklung der autonomen Fahrtechnologie leisten. Mit der Popularisierung und Anwendung der autonomen Fahrtechnologie wird die Trusted-Computing-Technologie in Zukunft eine noch wichtigere Rolle spielen und zu einem der wichtigen Garanten für die Entwicklung der autonomen Fahrtechnologie werden.
Das obige ist der detaillierte Inhalt vonAnwendung vertrauenswürdiger Computertechnologie im Bereich des autonomen Fahrens. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1374
1374
 52
52

 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 So machen Sie das Löschen vom Startbildschirm im iPhone rückgängig
Apr 17, 2024 pm 07:37 PM
So machen Sie das Löschen vom Startbildschirm im iPhone rückgängig
Apr 17, 2024 pm 07:37 PM
Sie haben etwas Wichtiges von Ihrem Startbildschirm gelöscht und versuchen, es wiederherzustellen? Es gibt verschiedene Möglichkeiten, App-Symbole wieder auf dem Bildschirm anzuzeigen. Wir haben alle Methoden besprochen, die Sie anwenden können, um das App-Symbol wieder auf dem Startbildschirm anzuzeigen. So machen Sie das Entfernen vom Startbildschirm auf dem iPhone rückgängig. Wie bereits erwähnt, gibt es mehrere Möglichkeiten, diese Änderung auf dem iPhone wiederherzustellen. Methode 1 – App-Symbol in der App-Bibliothek ersetzen Sie können ein App-Symbol direkt aus der App-Bibliothek auf Ihrem Startbildschirm platzieren. Schritt 1 – Wischen Sie seitwärts, um alle Apps in der App-Bibliothek zu finden. Schritt 2 – Suchen Sie das App-Symbol, das Sie zuvor gelöscht haben. Schritt 3 – Ziehen Sie einfach das App-Symbol aus der Hauptbibliothek an die richtige Stelle auf dem Startbildschirm. Dies ist das Anwendungsdiagramm
 Die Rolle und praktische Anwendung von Pfeilsymbolen in PHP
Mar 22, 2024 am 11:30 AM
Die Rolle und praktische Anwendung von Pfeilsymbolen in PHP
Mar 22, 2024 am 11:30 AM
Die Rolle und praktische Anwendung von Pfeilsymbolen in PHP In PHP wird das Pfeilsymbol (->) normalerweise verwendet, um auf die Eigenschaften und Methoden von Objekten zuzugreifen. Objekte sind eines der Grundkonzepte der objektorientierten Programmierung (OOP) in PHP. In der tatsächlichen Entwicklung spielen Pfeilsymbole eine wichtige Rolle bei der Bedienung von Objekten. In diesem Artikel werden die Rolle und die praktische Anwendung von Pfeilsymbolen vorgestellt und spezifische Codebeispiele bereitgestellt, um den Lesern ein besseres Verständnis zu erleichtern. 1. Die Rolle des Pfeilsymbols für den Zugriff auf die Eigenschaften eines Objekts. Das Pfeilsymbol kann für den Zugriff auf die Eigenschaften eines Objekts verwendet werden. Wenn wir ein Paar instanziieren
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
 FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
Die Zielerkennung ist ein relativ ausgereiftes Problem in autonomen Fahrsystemen, wobei die Fußgängererkennung einer der ersten Algorithmen ist, die eingesetzt werden. In den meisten Arbeiten wurde eine sehr umfassende Recherche durchgeführt. Die Entfernungswahrnehmung mithilfe von Fischaugenkameras für die Rundumsicht ist jedoch relativ wenig untersucht. Aufgrund der großen radialen Verzerrung ist es schwierig, die standardmäßige Bounding-Box-Darstellung in Fischaugenkameras zu implementieren. Um die obige Beschreibung zu vereinfachen, untersuchen wir erweiterte Begrenzungsrahmen-, Ellipsen- und allgemeine Polygondesigns in Polar-/Winkeldarstellungen und definieren eine mIOU-Metrik für die Instanzsegmentierung, um diese Darstellungen zu analysieren. Das vorgeschlagene Modell „fisheyeDetNet“ mit polygonaler Form übertrifft andere Modelle und erreicht gleichzeitig 49,5 % mAP auf dem Valeo-Fisheye-Kameradatensatz für autonomes Fahren
 Vom Anfänger bis zum Experten: Entdecken Sie verschiedene Anwendungsszenarien des Linux-Befehls tee
Mar 20, 2024 am 10:00 AM
Vom Anfänger bis zum Experten: Entdecken Sie verschiedene Anwendungsszenarien des Linux-Befehls tee
Mar 20, 2024 am 10:00 AM
Der Linuxtee-Befehl ist ein sehr nützliches Befehlszeilentool, das Ausgaben in eine Datei schreiben oder an einen anderen Befehl senden kann, ohne die vorhandene Ausgabe zu beeinträchtigen. In diesem Artikel werden wir die verschiedenen Anwendungsszenarien des Linuxtee-Befehls eingehend untersuchen, vom Anfänger bis zum Experten. 1. Grundlegende Verwendung Werfen wir zunächst einen Blick auf die grundlegende Verwendung des Tee-Befehls. Die Syntax des Tee-Befehls lautet wie folgt: tee[OPTION]...[DATEI]...Dieser Befehl liest Daten aus der Standardeingabe und speichert sie dort
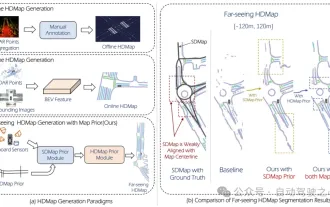 Massenproduktionskiller! P-Mapnet: Durch die vorherige Verwendung der Karte SDMap mit niedriger Genauigkeit wird die Kartenleistung deutlich um fast 20 Punkte verbessert!
Mar 28, 2024 pm 02:36 PM
Massenproduktionskiller! P-Mapnet: Durch die vorherige Verwendung der Karte SDMap mit niedriger Genauigkeit wird die Kartenleistung deutlich um fast 20 Punkte verbessert!
Mar 28, 2024 pm 02:36 PM
Wie oben geschrieben, besteht einer der Algorithmen, mit denen aktuelle autonome Fahrsysteme die Abhängigkeit von hochpräzisen Karten loswerden, darin, die Tatsache auszunutzen, dass die Wahrnehmungsleistung im Fernbereich immer noch schlecht ist. Zu diesem Zweck schlagen wir P-MapNet vor, wobei sich „P“ auf die Fusion von Kartenprioritäten konzentriert, um die Modellleistung zu verbessern. Konkret nutzen wir die Vorinformationen in SDMap und HDMap aus: Einerseits extrahieren wir schwach ausgerichtete SDMap-Daten aus OpenStreetMap und kodieren sie in unabhängige Begriffe, um die Eingabe zu unterstützen. Es besteht das Problem der schwachen Ausrichtung zwischen der streng modifizierten Eingabe und der tatsächlichen HD+Map. Unsere auf dem Cross-Attention-Mechanismus basierende Struktur kann sich adaptiv auf das SDMap-Skelett konzentrieren und erhebliche Leistungsverbesserungen bringen.
