

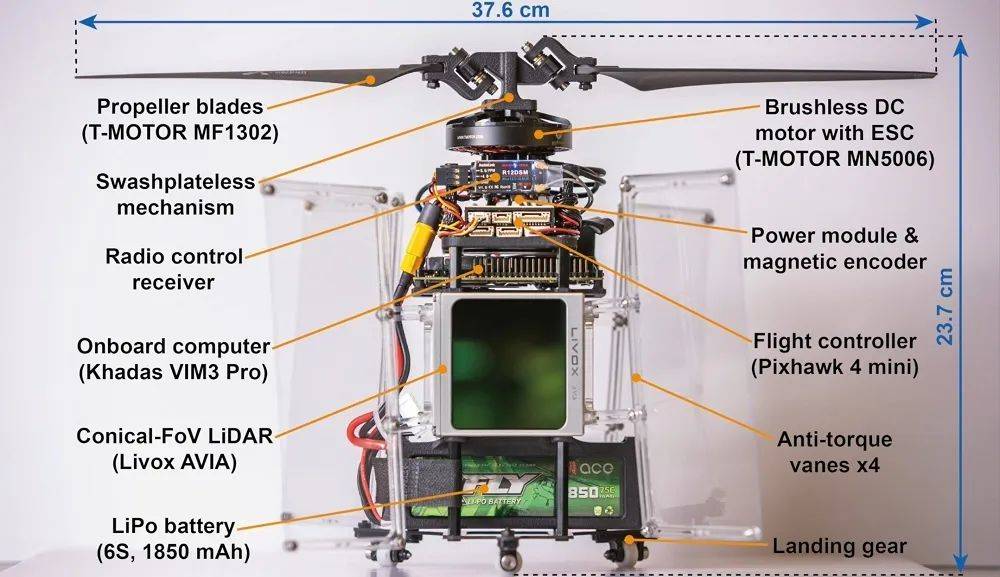
Strukturdiagramm von PULSAR
[Global Network Drone Comprehensive Report] Neuigkeiten von der University of Hong Kong, kürzlich hat ein Team unter der Leitung von Dr. Zhang Fu, Assistenzprofessor am Department of Mechanical Engineering, School of Engineering, The University of Hong Kong (HKU), … hat kürzlich eine Drohne entwickelt, die mit Strom fliegt, ohne eine Radarübertragung anzusteuern. Eine Sensordrohne namens PULSAR. „Pulsare“ haben vielfältige Funktionen wie Wahrnehmung und Kartierung, genau wie die Szene im Science-Fiction-Film „Prometheus“, in der Menschen mithilfe von Spindetektoren in Echtzeit eine dreidimensionale Karte einer Höhle erstellen und so zur Realität werden.
Berichten zufolge nimmt die Bedeutung von Drohnen in vielen Bereichen wie Such- und Rettungsaktionen, Höhlenforschung und Architekturkartierung allmählich zu. Dr. Zhangs Team konzentriert sich auf die Rotationsbewegung und benötigt keine Radarsensorik. Aufgrund ihrer Rotationsbewegung und des Scanmodus von Lidar-Strahlen ähneln sie intuitiv den Pulsaren in der Astronomie ähnlich. „Pulsar“ ist mit einem Mikro-Bordcomputer und Lidar ausgestattet und ermöglicht eine völlig autonome Wahrnehmung, Kartierung, Planung und Steuerung, ohne dass externe Geräteunterstützung im Innen- oder Außenbereich erforderlich ist. Am Pulsar wird ein einzelner Aktuator verwendet, um einen Mechanismus ohne Taumelscheibe anzutreiben, der gleichzeitig Schub und Drehmoment erzeugen kann.
Dr. Zhangs Team führte Experimente zur Umwelterkundung und zur multidirektionalen dynamischen Hindernisvermeidung durch. Die Ergebnisse zeigten, dass es eine autonome Navigation und Echtzeiterkennung in unbekannten Umgebungen durchführen kann, ohne auf die Unterstützung externer Geräte angewiesen zu sein. Statische und dynamische Hindernisse in der Umgebung.
„Pulsar“ ist in der Lage, nachts eine vollautomatische Navigation durchzuführen, was darauf hinweist, dass seine Navigationsleistung nicht durch die Lichtverhältnisse eingeschränkt wird. Darüber hinaus kann es mit externen Windstörungen umgehen. Selbst wenn er durch eine maximale Windgeschwindigkeit von 4,5 Metern pro Sekunde gestört wird, kann der „Pulsar“ in einem kleinen Bereich noch eine Schwebeposition halten. Diese Eigenschaften machen das Flugzeug in freier Wildbahn sicherer und stabiler.
Der Sensor kann auch das Sichtfeld durch intrinsische Drehbewegungen vergrößern und so zusätzlich zu den oben genannten Fähigkeiten die Wahrnehmungsfähigkeiten und die Missionseffizienz der Drohne verbessern. Derzeit gibt es zwei Hauptmethoden zur Erweiterung des Sichtfelds des Sensors, denen gemeinsam ist, dass sie insgesamt einen hohen Stromverbrauch haben. Ein möglicher Ansatz ist der Einsatz von Sensoren mit großem Sichtfeld, etwa Fischaugenobjektive, Spiegelkameras oder 360-Grad-Lidar. Allerdings leiden Fischaugenkameras und selbstreflektierende Kameras häufig unter erheblichen Verformungen, und das Sichtfeld von 360-Grad-Lidar in vertikaler Richtung ist immer noch schmal und die Auflösung niedrig. Eine andere Methode besteht darin, mehrere Sensoren gleichzeitig zu verwenden, beispielsweise ein Multikamerasystem oder ein Multi-Lidar-System. Multisensorsysteme bringen jedoch zusätzliche Kosten und eine längere Datenverarbeitungszeit mit sich. Auch die Verwendung eines kardanischen Systems zur Erweiterung des Sichtfelds bringt ähnliche Probleme mit sich.
Dr. Zhangs Team hat herausgefunden, dass „Pulsar“ 26,7 % des Energieverbrauchs einsparen kann und gleichzeitig eine gute Flexibilität im Vergleich zu Quadrocopter-Drohnen mit der gleichen Blattfläche und Belastung bietet. Das Energiesystem des Pulsars nutzt einen einzigen Aktuator, um eine höhere Energieumwandlungseffizienz mit einem Gesamtwirkungsgrad von bis zu 6,65 Gramm pro Watt zu erreichen. Mit einem Propellerdurchmesser von nur 37,6 Zentimetern und einem kapazitätsschwachen Akku mit einer Kapazität von 41 Wattstunden erreichte diese 1234 Gramm schwere Drohne eine Schwebezeit von mehr als 12 Minuten. Wenn das Lidar durch größere Propeller und Batterien ersetzt wird, kann die Schwebezeit des „Pulsar“ auf mehr als 40 Minuten verlängert werden.
Die Forschungsergebnisse wurden in Science Robotics veröffentlicht. Der Artikel trägt den Titel „Ein selbstrotierendes, einfach betätigtes UAV mit erweitertem Sensorsichtfeld für autonome Navigation“ und wurde auf der Homepage der Science-Website veröffentlicht.
Dr. Zhang sagte, dass die von seinem Team eingerichtete Forschungsplattform einer tiefergehenden Forschung zu Spin-Drohnen förderlich sein wird gleichzeitige Positionierung und Kontrolle unter heftiger Bewegung.“ Mapping (SLAM)-Technologie.“
Das obige ist der detaillierte Inhalt vonEin Höhlenforschungsartefakt? Selbstrotierende Einzelrotordrohne mit autonomer Navigation, effizienter!. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 RGB in hexadezimales RGB umwandeln
RGB in hexadezimales RGB umwandeln
 Was beinhalten E-Commerce-Plattformen?
Was beinhalten E-Commerce-Plattformen?
 orientdb
orientdb
 So beheben Sie den Fehler 0xc000409
So beheben Sie den Fehler 0xc000409
 Audiokomprimierung
Audiokomprimierung
 Was sind die CSS3-Gradienteneigenschaften?
Was sind die CSS3-Gradienteneigenschaften?
 Es gibt mehrere Möglichkeiten, die CSS-Position zu positionieren
Es gibt mehrere Möglichkeiten, die CSS-Position zu positionieren
 Wie man mit virtueller Währung handelt
Wie man mit virtueller Währung handelt
 So wechseln Sie die Einstellungen zwischen Huawei-Dual-Systemen
So wechseln Sie die Einstellungen zwischen Huawei-Dual-Systemen








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



