
 Technologie-Peripheriegeräte
KI
Wie kann die Effizienz der Cluster-Zusammenarbeit verbessert werden? Chinesische und ausländische Teams arbeiten zusammen, um eine Strategie zur Steuerung der Roboterformation zu entwickeln, die auf der Mittelwertverschiebung basiert
Technologie-Peripheriegeräte
KI
Wie kann die Effizienz der Cluster-Zusammenarbeit verbessert werden? Chinesische und ausländische Teams arbeiten zusammen, um eine Strategie zur Steuerung der Roboterformation zu entwickeln, die auf der Mittelwertverschiebung basiert
Wie kann die Effizienz der Cluster-Zusammenarbeit verbessert werden? Chinesische und ausländische Teams arbeiten zusammen, um eine Strategie zur Steuerung der Roboterformation zu entwickeln, die auf der Mittelwertverschiebung basiert

Stellen Sie sich das Szenario vor, dass „Menschenmassen Schlange stehen, um den Aufzug zu betreten“. Wenn die Person, die zuerst einsteigt, „egoistisch“ ist, bleibt sie nach dem Betreten des Aufzugs stehen, wodurch die Personen hinter ihr daran gehindert werden, den Aufzug zu betreten. Wenn der Vordermann „selbstlos“ ist, wird er die Initiative ergreifen, um den Aufzug zu betreten, damit die Leute dahinter den Aufzug problemlos betreten können.
Inspiriert von diesem Szenario entwickelten die Forscher die selbstlose Erkundungsstrategie Diese einfache Strategie kann die Kooperationseffizienz des Roboterclustersystems erheblich verbessern. Die Ergebnisse wurden im Juni 2023 veröffentlicht.

▍Einführung der „selbstlosen“ Erkundung: Roboterkooperation effizienter gestalten
Unter vielen Roboterschwarmsystemen ist die Kontrolle der Schwarmbildung ein wichtiges und einzigartiges Thema. Im Vergleich zu anderen Cluster-Zusammenarbeitsproblemen stellt die Formationskontrolle eine einzigartige technische Herausforderung dar, das heißt, die globale Formation ist tatsächlich eine globale Einschränkung. Diese Einschränkung schafft eine „Konkurrenzbeziehung“ zwischen Robotern, die ursprünglich „kooperierten“. Im Wesentlichen ist es dieses Wettbewerbsverhältnis, das viele Schwierigkeiten bei der Formationskontrolle mit sich bringt. Traditionelle Methoden verwenden normalerweise die Zielzuweisung, um das Wettbewerbsproblem zwischen Robotern zu lösen. Allokationsbasierte Methoden haben jedoch Probleme mit der Fehlertoleranz und einer schwachen Anpassungsfähigkeit. Wenn die zugewiesenen Ziele unangemessen sind oder einige Roboter nicht richtig funktionieren, müssen die Ziele ständig neu zugewiesen werden, was zu einer geringen Effizienz führt.
Kürzlich haben Forscher der Westlake University, der Beihang University, der Tsinghua University und der University of Sheffield im Vereinigten Königreich eine neue Methode zur Steuerung der Roboterkoordination vorgeschlagen, die auf einer „selbstlosen“ Erkundungsstrategie basiert. Der Kern besteht aus einem Algorithmus, der auf Mean-Shift basiert So lösen Sie Wettbewerbskonflikte zwischen Robotern: Das heißt, wenn ein Roboter vorhersagt, dass er mit umliegenden Robotern konkurrieren wird, verlässt er aktiv seine aktuelle Position und bewegt sich in einen offeneren Bereich.
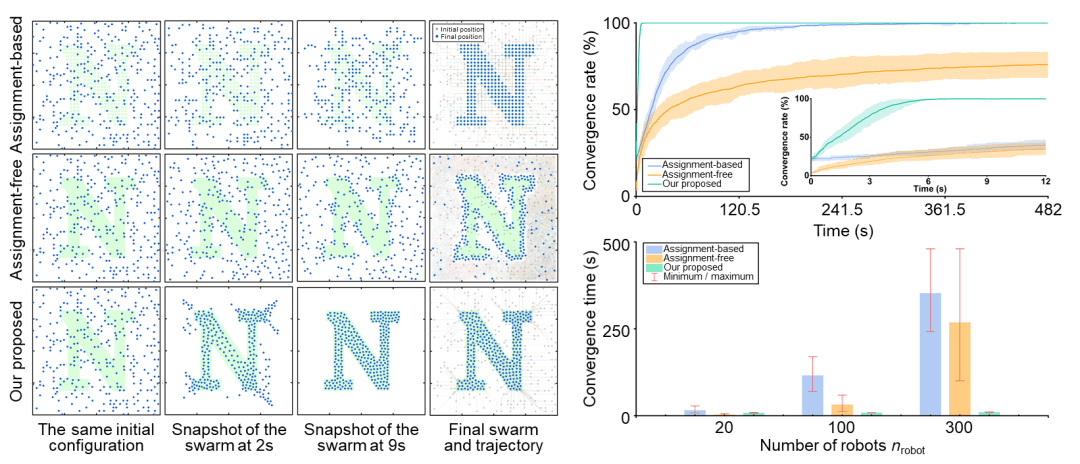
Man spricht von einer „selbstlosen“ Strategie, weil sie Konflikte „aktiv“ lösen kann.Im Vergleich zu den neuesten Forschungsarbeiten kann die Effizienz der vorgeschlagenen „selbstlosen“ Explorationsstrategie bei großen Clustern um ein Dutzendfaches verbessert werden, und diese Verbesserung wird mit zunehmender Clustergröße noch weiter gesteigert. Da diese Strategie außerdem nicht auf der Zielzuweisung beruht, ist sie von Natur aus fehlertolerant und anpassungsfähig und kann auf komplexe Weltraumforschung, kollaborative Handhabung und andere Aufgaben ausgeweitet werden.
Die „selbstlose“ Explorationsstrategie besteht aus drei Teilen. Der erste Teil ist das Mensch-Cluster-Interaktionssystem, das zur Formulierung der von Menschen benötigten geometrischen Formation verwendet wird. Der zweite Teil ist ein verteilter Verhandlungsalgorithmus. Alle Roboter verhandeln die euklidischen Parameter der Zielformation, einschließlich Position und Richtung, auf verteilte Weise mit ihren umgebenden Nachbarn. Der dritte und wichtigste Teil ist der verteilte Formationskontrollalgorithmus. Der Steueralgorithmus besteht aus drei Steueranweisungen.
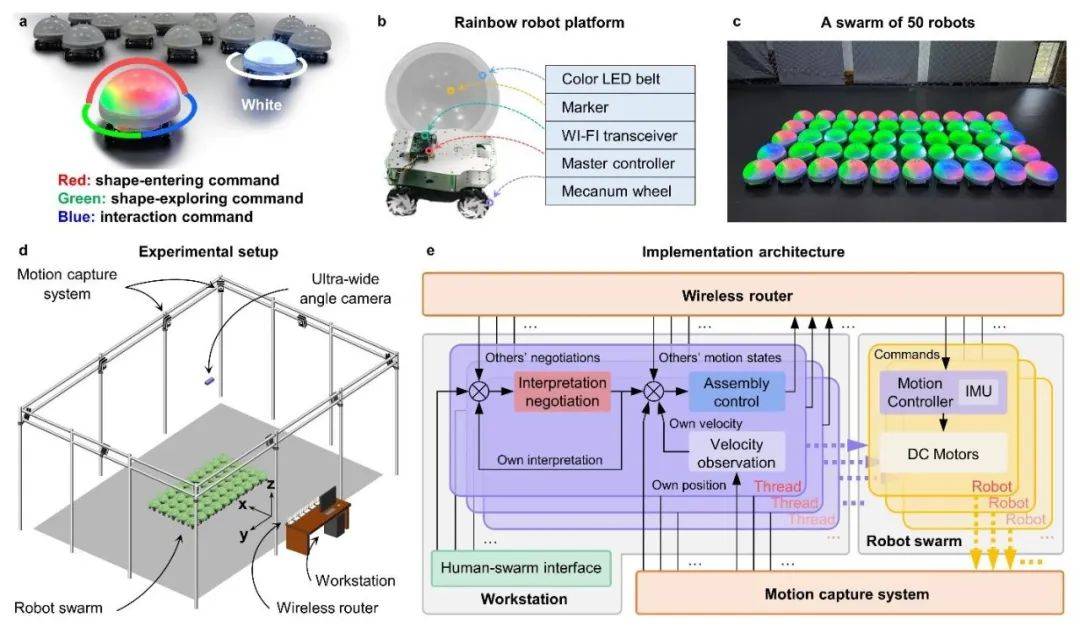
Der erste ist der Formationseintrittsbefehl, der den Roboter in die Zielformation einführen soll. Der zweite Befehl ist der Formationserkundungsbefehl, mit dem der mögliche Bereich innerhalb der Formation mithilfe des Mean-Shift-Mechanismus erkundet wird. Der dritte ist der interaktive Befehl, der zur Vermeidung von Kollisionen und zur Geschwindigkeitsanpassung zwischen Robotern verwendet wird.Basierend auf dieser Strategie entwickelte das Forschungsteam ein Cluster-Experimentalsystem
mit50 Bodenrobotern. Relevante Experimente wurden mit Unterstützung eines Indoor-Bewegungserfassungssystems durchgeführt und in einer verteilten, parallelen Multithread-Methode implementiert. 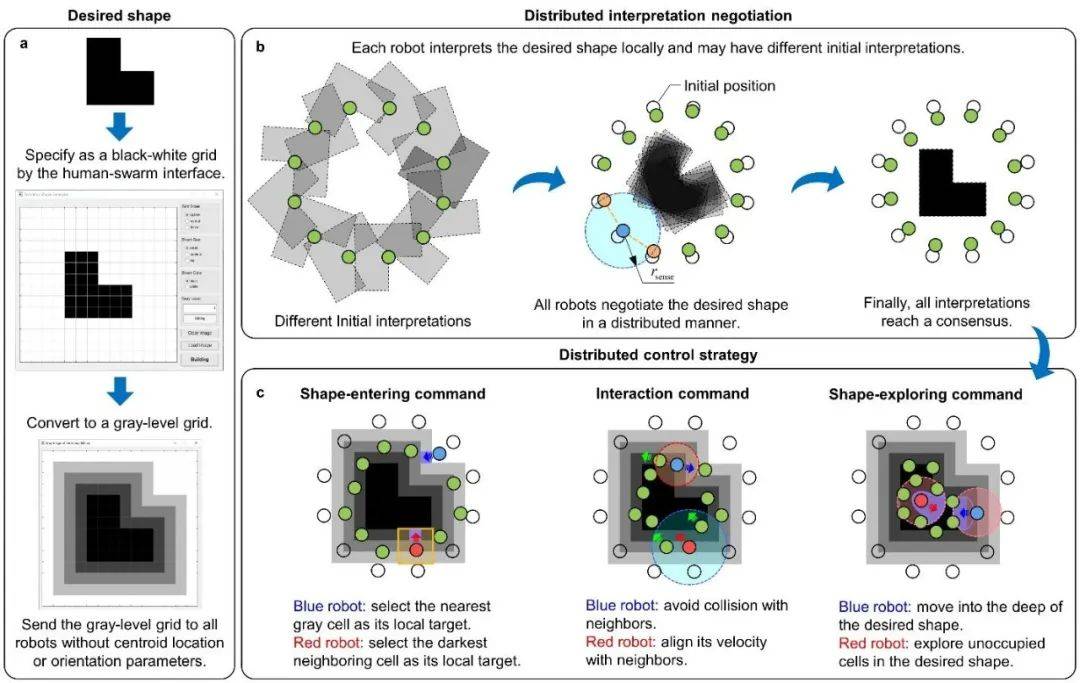
▍Robotercluster erfüllen eine Vielzahl von Aufgaben: Sie verfügen über effiziente Zusammenarbeit und autonome Steuerungsfähigkeiten
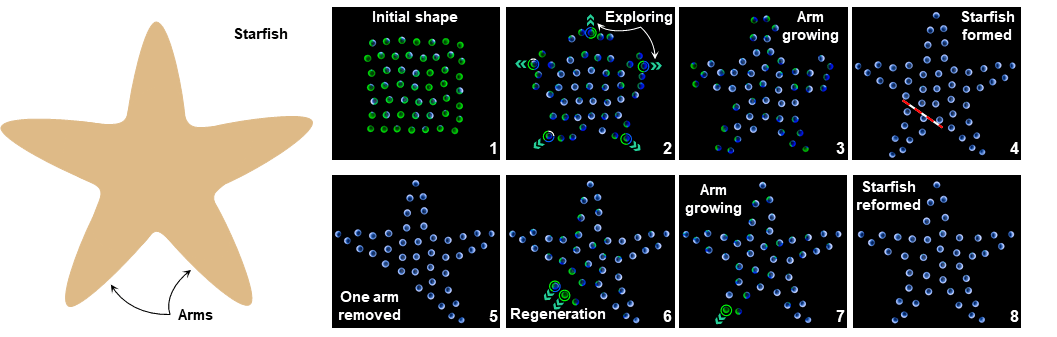
die Selbstorganisation des Roboters steuern, um komplexe, nicht konvexe Formen zu bilden. Zum Beispiel eine „Schneeflocken“-Formation mit reichen Verzweigungen. Mit dieser Strategie kann der Robotercluster die Formation genau realisieren, ohne in ein lokales Optimum zu fallen. Darüber hinaus können Roboterschwärme auf diese Weise unterschiedliche nicht-konvexe Formationen bilden und fließend von einer Form in die andere wechseln.
Die „selbstlose“ Explorationsstrategie weist im Vergleich zu den neuesten Forschungsarbeiten eine um ein Dutzendfache Effizienzsteigerung auf, und diese Verbesserung wird mit zunehmender Clustergröße noch verstärkt.
Da die „selbstlose“ Erkundungsstrategie nicht durch Probleme wie Zielzuweisung und Änderungen in der Anzahl der Roboter eingeschränkt wird, verfügt sie über Anpassungsfähigkeiten. Wenn beispielsweise einige Roboter aus dem Cluster entfernt werden, erfordert das gesamte System keine Fehlererkennung oder fehlertolerante Steuerung und kann sich nahtlos neu formieren, was dem gesamten System ein gewisses Maß an „Regenerationsfähigkeit“ verleiht.
Ein weiteres Merkmal der „selbstlosen“ Erkundungsstrategie ist die Fähigkeit, zeitlich veränderliche Formationen zu verfolgen. Eine wichtige Anwendung besteht darin, die kollaborative Handhabung mehrerer Roboter zu realisieren. Dabei muss der Roboter einerseits die Formation aufrechterhalten und andererseits dem Anführer folgen, um eine Formationsbewegung und damit einen koordinierten Warentransport zu erreichen.
Darüber hinaus können mit der „selbstlosen“ Erkundungsstrategie komplexe Umgebungen erkundet werden. Sie können beispielsweise eine Menschenmenge simulieren, die durch einen schmalen Eingang einen Raum betritt, ohne am Eingang stecken zu bleiben. Es ist erwähnenswert, dass Dieses Beispiel die Strategie der „selbstlosen“ Erkundung anschaulich erklärt. Es ist der Lebensszene von Menschen, die den Aufzug betreten, sehr ähnlich: Wenn viele Menschen den Aufzug betreten wollen, Wenn eine Person „egoistisch“ ist, dann wird sie nach dem Betreten des Aufzugs aufhören, sich zu bewegen, weil sie ihr Ziel erreicht hat. Allerdings wird dadurch der Zutritt für Personen hinter Ihnen blockiert. Wenn diese Person „selbstlos“ ist, dann wird sie die Initiative ergreifen, hineinzugehen, damit die Menschen dahinter reibungslos eintreten können.
Ein weiteres Beispiel ist, dass damit komplexe Labyrinthe erkundet werden können. Obwohl es im Labyrinth viele nicht konvexe Strukturen wie Ecken gibt, kann diese Strategie aufgrund ihrer guten Erkundbarkeit dennoch erfolgreich eine vollständige Abdeckung des Labyrinths erreichen, ohne in das lokale Optimum zu fallen.
▍Fazit
Die Idee des in diesem Artikel vorgeschlagenen Algorithmus ist sehr einfach, aber es ist eine so einfache Idee, die ein wichtiges Problem löst, mit dem die Clusterbildungssteuerung seit langem konfrontiert ist. Zukünftig können die Wahrnehmungsfähigkeiten der Roboterplattform weiter ausgebaut werden, um das gesamte System intelligenter zu machen und die Entstehung von Schwarmverhaltensweisen zu ermöglichen, die hochintelligenten Organismen tatsächlich ähneln.
▍Artikelquelle
G. Sun, R. Zhou, Z. Ma, Y. Li, R. Groß, Z. Chen und S. Zhao*, „Mean-Shift Exploration in Shape Assembly of Robot Swarms“, Nature Communications, Bd. 14 , S. 3476, 2023. https://doi.org/10.1038/s41467-023-39251-5
Das obige ist der detaillierte Inhalt vonWie kann die Effizienz der Cluster-Zusammenarbeit verbessert werden? Chinesische und ausländische Teams arbeiten zusammen, um eine Strategie zur Steuerung der Roboterformation zu entwickeln, die auf der Mittelwertverschiebung basiert. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1374
1374
 52
52

 Wie implementiert man Robotersteuerung und Roboternavigation in C++?
Aug 25, 2023 pm 09:12 PM
Wie implementiert man Robotersteuerung und Roboternavigation in C++?
Aug 25, 2023 pm 09:12 PM
Wie implementiert man Robotersteuerung und Roboternavigation in C++? Robotersteuerung und -navigation sind sehr wichtige Bestandteile der Robotertechnologie. In der Programmiersprache C++ können wir verschiedene Bibliotheken und Frameworks verwenden, um Robotersteuerung und -navigation zu implementieren. In diesem Artikel wird erläutert, wie Sie mit C++ Codebeispiele zur Steuerung von Robotern und zur Implementierung von Navigationsfunktionen schreiben. 1. Robotersteuerung In C++ können wir serielle Kommunikation oder Netzwerkkommunikation verwenden, um die Robotersteuerung zu realisieren. Das Folgende ist ein Beispielcode, der serielle Kommunikation zur Steuerung der Roboterbewegung verwendet: inkl
 Verwendung der Go-Sprache zur Entwicklung und Implementierung von Robotersteuerung und -simulation
Aug 06, 2023 am 09:10 AM
Verwendung der Go-Sprache zur Entwicklung und Implementierung von Robotersteuerung und -simulation
Aug 06, 2023 am 09:10 AM
So verwenden Sie die Go-Sprache zum Entwickeln und Implementieren von Robotersteuerung und -simulation. Einführung: Mit der kontinuierlichen Entwicklung von Wissenschaft und Technologie wird die Robotiktechnologie zunehmend in verschiedenen Bereichen eingesetzt. Im Roboterentwicklungsprozess sind Simulation und Steuerung zwei wichtige Bindeglieder. In diesem Artikel wird die Verwendung der Go-Sprache zur Entwicklung und Implementierung von Robotersteuerung und -simulation vorgestellt und entsprechende Codebeispiele bereitgestellt. 1. Einführung in die Go-Sprache Die Go-Sprache (oder Golang) ist eine von Google entwickelte Open-Source-Programmiersprache. Sie zeichnet sich durch Effizienz, Einfachheit und starke Parallelität aus.
 Halten Sie die PHP-Schreibstandards ein: Verbessern Sie die Teamarbeit und die Möglichkeiten zur gemeinschaftlichen Codeentwicklung
Aug 25, 2023 pm 07:51 PM
Halten Sie die PHP-Schreibstandards ein: Verbessern Sie die Teamarbeit und die Möglichkeiten zur gemeinschaftlichen Codeentwicklung
Aug 25, 2023 pm 07:51 PM
Halten Sie die PHP-Schreibspezifikationen ein: Verbessern Sie die Teamarbeit und die Fähigkeiten zur kollaborativen Codeentwicklung. Einführung: Bei der Softwareentwicklung sind Codequalität und Teamarbeit von entscheidender Bedeutung. Die Einhaltung von Programmierstandards ist eines der effektivsten Mittel zur Verbesserung der Codequalität und der Teamarbeit. Dieser Artikel konzentriert sich darauf, wie man PHP-Schreibstandards einhält, um die Teamarbeit und die Fähigkeiten zur gemeinschaftlichen Codeentwicklung zu verbessern. 1. Namenskonventionen Gute Namenskonventionen können die Lesbarkeit und Wartbarkeit von Code verbessern. Bei der PHP-Programmierung empfehlen wir, die folgende Namenskonvention zu befolgen: Verwenden Sie die CamelCase-Benennung für Variablen und Funktionen, z
 Robotersteuerung und ihre Anwendungen in PHP
Jun 23, 2023 am 08:39 AM
Robotersteuerung und ihre Anwendungen in PHP
Jun 23, 2023 am 08:39 AM
Mit der kontinuierlichen Weiterentwicklung der Technologie der künstlichen Intelligenz sind Roboter zu einem unverzichtbaren Bestandteil der modernen Gesellschaft geworden. Auch die Robotersteuerungstechnologie in PHP wird ständig weiterentwickelt und angewendet. Sie kann uns helfen, verschiedene Probleme zu lösen und die Effizienz zu verbessern. In diesem Artikel werden die Robotersteuerung und ihre Anwendungen in PHP vorgestellt. 1. Was ist Robotersteuerungstechnologie? Unter Robotersteuerungstechnik versteht man die präzise Bedienung und Steuerung von Robotern durch Computer oder andere elektronische Geräte, sodass der Roboter verschiedene Aufgaben nach voreingestellten Programmen erledigen kann. Die Robotersteuerungstechnik umfasst hauptsächlich Roboter
 PHP-Schreibstandards und Teamarbeitspraxis: Verbesserung der Projektentwicklungseffizienz
Aug 25, 2023 pm 11:27 PM
PHP-Schreibstandards und Teamarbeitspraxis: Verbesserung der Projektentwicklungseffizienz
Aug 25, 2023 pm 11:27 PM
Die Praxis des Schreibens von PHP-Spezifikationen und der Teamzusammenarbeit: Verbesserung der Projektentwicklungseffizienz In der Projektentwicklung ist das Schreiben von Spezifikationen eine notwendige Praxis. Gute Schreibstandards können die Lesbarkeit und Wartbarkeit von Code verbessern, Fehler auf niedriger Ebene vermeiden und Teammitgliedern eine bessere Zusammenarbeit ermöglichen. In diesem Artikel werden einige Praktiken zum Schreiben von Spezifikationen in PHP vorgestellt und untersucht, wie diese Spezifikationen in der Teamarbeit angewendet werden können, um die Effizienz der Projektentwicklung zu verbessern. Verwendung des PSR-2-Standards PSR-2 ist ein Standard für PHP-Codespezifikationen. Er legt eine Reihe von Codeformaten, Kommentaren und anderen fest.
 Wie führt man Robotersteuerung und Automatisierungsentwicklung in PHP durch?
May 21, 2023 am 08:27 AM
Wie führt man Robotersteuerung und Automatisierungsentwicklung in PHP durch?
May 21, 2023 am 08:27 AM
Als in der Webentwicklung weit verbreitete Programmiersprache hat PHP auch einen wichtigen Anwendungswert in den Bereichen Robotersteuerung und Automatisierungsentwicklung. In diesem Artikel wird die Durchführung der Robotersteuerungs- und Automatisierungsentwicklung in PHP vorgestellt. 1. Was ist Robotersteuerung? Unter Robotern versteht man intelligente Geräte, die auf künstlicher Intelligenz basieren und menschliches Verhalten simulieren und eine Reihe von Aufgaben autonom erledigen können. Unter Robotersteuerung versteht man den Prozess der Informationsverarbeitung, Befehlsübertragung und Überwachung von Robotern durch Computer. 2. So steuern Sie Roboter mit PHP
 Wie führt man industrielle Automatisierung und Robotersteuerung in PHP durch?
May 22, 2023 pm 01:51 PM
Wie führt man industrielle Automatisierung und Robotersteuerung in PHP durch?
May 22, 2023 pm 01:51 PM
PHP ist eine serverseitige Open-Source-Skriptsprache, die im Bereich der Webentwicklung weit verbreitet ist. PHP ist jedoch nicht auf die Webentwicklung beschränkt, sondern kann auch für die industrielle Automatisierung und Robotersteuerung eingesetzt werden. In diesem Artikel wird die Verwendung von PHP für die industrielle Automatisierung und Robotersteuerung vorgestellt. 1. Anwendung von PHP in der industriellen Automatisierung Sensordatenerfassung In der industriellen Automatisierung sind Sensoren ein sehr wichtiger Bestandteil. Sensoren können Daten zu verschiedenen Parametern in der Umgebung sammeln, wie z. B. Temperatur, Luftfeuchtigkeit, Druck usw. Sensordaten können über die serielle Schnittstelle oder das Netzwerk übertragen werden
 Spielen mit Java Git: Aufbau eines effizienten Team-Zusammenarbeitsprozesses
Feb 23, 2024 am 10:04 AM
Spielen mit Java Git: Aufbau eines effizienten Team-Zusammenarbeitsprozesses
Feb 23, 2024 am 10:04 AM
:Git ist ein verteiltes Versionskontrollsystem, das es Entwicklern ermöglicht, Änderungen in der Codebasis zu verfolgen und bei der Entwicklung zusammenzuarbeiten. Es ist nützlich für die Teamarbeit, da es Entwicklern ermöglicht, an verschiedenen Zweigen zu arbeiten und ihre Änderungen dann im Hauptzweig zusammenzuführen. Grundkonzepte von Git Das Kernkonzept von Git ist das Repository. Das Repository ist eine Datenbank, die den gesamten Verlauf der Codebasis enthält. Wenn Entwickler Änderungen an der Codebasis vornehmen, speichert Git diese Änderungen im Repository. Auf diese Weise können Entwickler jederzeit zu jedem vorherigen Zustand der Codebasis zurückkehren. Eines der wichtigsten Konzepte in einem Repository ist die Verzweigung. Ein Zweig ist eine Kopie einer Codebasis, an der Entwickler Änderungen vornehmen können, ohne dass sich dies auf die Hauptcodebasis auswirkt. Dies ermöglicht Entwicklern
