

Gibt es ein neues Transportmittel, das die „Menschen folgen der Herde“-Reiseart während der Hauptverkehrszeiten lösen und das Problem der Verkehrsstaus vollständig lösen kann?
Viele Menschen müssen über dieses Problem nachgedacht haben, wenn sie auf „Stau“ oder „Menschenmassen“ stoßen. Autos in Transformatoren zu verwandeln und über Fahrzeuge hinauszugehen, mag die Idee der meisten Menschen sein.

Kürzlich hat „Nature Communications“ einen M4 (Multimodaler mobiler Transformationsroboter Morphobot) veröffentlicht, der sehr gut mit den Fantasien der Menschen über zukünftige Transportmittel übereinstimmt.

Es wird berichtet, dass M4 gemeinsam vom California Institute of Technology und der Northeastern University in den Vereinigten Staaten entwickelt wurde, mit der Absicht, einen Roboter mit einem breiten Spektrum an Bewegungsplastizität in einer unstrukturierten Multi-Matrix-Umgebung zu produzieren. Der Roboter verfügt über eine außergewöhnliche Mobilität und die Möglichkeit einer multimodalen zusammengesetzten grenzüberschreitenden Bewegung in der Zukunft.
Viele menschliche Roboterdesigns sind von der Tierbionik inspiriert. In der Natur verwenden Wassertiere wie Meeresschildkröten und Seelöwen ihre Vorderflossen zum Schwimmen, und sie können auch ihre Vorderflossen verwenden, um ihr schweres Gewicht zu tragen und auf dem Boden zu laufen, wie Erdmännchen alle vier Gliedmaßen zum Laufen und Gehen nutzen. und können auch auf ihren Hinterbeinen stehen, um die Umgebung zu erkennen; junge Moschusfasane fliegen mit ihren Flügeln und können mit ihren Flügeln auch dabei helfen, vertikale oder steile Hänge zu erklimmen, um Zuflucht zu suchen.
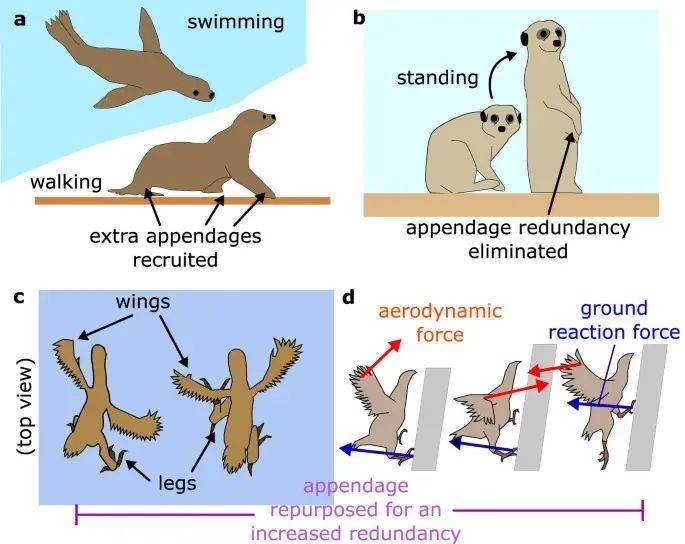
Die Flossen des Seelöwen helfen beim Gehen. b Die Hinterbeine des Mungos helfen bei der Aufklärung. c Das Fasanenküken nutzt seine Flügel, um die Vierbeinerbewegung zu unterstützen. d Die Flügel des Chukar-Vogels helfen beim Kippen
Ein gemeinsames Team des California Institute of Technology und der Northeastern University ließ sich ebenfalls von diesen Tieren mit beträchtlicher motorischer Plastizität inspirieren und entwickelte unter Bezugnahme auf die Nutzung ihrer morphologischen und funktionellen Strukturen durch diese Tiere zur Umfunktionierung ihrer Gliedmaßen ein Gerät, das „kann „Bei Bedarf erstellt werden“ oder „Redundanzen beseitigen“ und sich einen mobilen Vorteil verschaffen“ Idee.Gleichzeitig hat das Forschungs- und Entwicklungsteam diese Idee auch beim M4-Roboter umgesetzt, sodass die vier Beine des M4-Roboters durch Verformung redundante Vorgänge ausführen können, um die Bewegungsplastizität zu maximieren.
Durch Nachjustieren können die vier Beine des M4 verschiedene Formen annehmen:
lVier Beine für die vierbeinige Fortbewegung
lVier Triebwerke für den Flug
lZwei Propeller + zwei Räder für WAIR auf 45-Grad-Hängen
lZwei Propeller + zwei Räder zum Überwinden großer Hindernisse
lZwei Räder + zwei Hände zur Motorradsteuerung
lMIPs zwei Räder
LUGV mit vier Rädern
lVier Räder zum Hocken
Die Befestigungen an der Unterseite des Fahrgestells können in Räder, Beine oder Propeller umgewandelt werden. Die Umsetzung dieses modularen Designs bietet wichtige Voraussetzungen für die Verbesserung der Leistung des M4.
Wenn der M4 auf zwei Rädern stehen muss, klappen zwei der vier Räder hoch und die eingebauten Propeller drehen sich nach oben, um dem Roboter das Gleichgewicht zu geben.
Wenn M4 fliegen muss, klappen alle vier Räder hoch und die Propeller heben den Roboter vom Boden ab.
Das Gelenkdesign an der Radbaugruppe ermöglicht dem M4 auch Gehbewegungen.
Es ist nur so, dass in der aktuellen Version des M4 die Laufbewegung größtenteils ein Proof of Concept ist. Zukünftig soll die M4-Generation in der Lage sein, komplexes, schwer begehbares Gelände effektiv zu durchqueren, was für Laufroboter nur schwer möglich ist.
Es versteht sich, dass die Bewegungshaltungen des M4 8 verschiedene Flugarten umfassen: Rollen, Kriechen, Hocken, Balancieren, Taumeln, Aufklärung und lokale Bedienung. Mithilfe redundanter Operationen, die von Anhängseln wiederverwendet werden, kann er verschiedene Bewegungsmodi ausführen. Durch die Neuverwendung von Anhängseln mit einem sich verändernden Rumpf und umschaltbaren Propellern kann der M4 zu einem unbemannten Bodenfahrzeug (UGV), einem mobilen Umkehrpendel (MIP), einem unbemannten Flugsystem (UAS), einem triebwerkunterstützten MIP, Beinbewegung usw. werden Motorrad-Manöver-MIP-Modus.
Zusätzlich zu seiner hervorragenden Mobilität hat das M4-Forschungs- und Entwicklungsteam auch künstliche Intelligenz hinzugefügt, die ihm eine „Seele“ verleiht und die Bewegungsflexibilität des Roboters mit künstlicher Intelligenz kombiniert, sodass M4 unabhängig von der Geländeform vor ihm die effektivste Bewegung auswählen kann.
In einer unbekannten Umgebung startet der M4 beispielsweise zunächst im energiesparendsten Allrad-Rollmodus. Wenn der M4 auf Hindernisse wie Felsbrocken trifft, schaltet er in den Standmodus und führt mit Hilfe integrierter Sensoren Mehrzweckscans des Gebiets zur Luftaufnahme und Aufklärung durch und liefert so wichtige strategische Situationsdaten.
Wenn der M4 auf eine Schlucht oder ein anderes Merkmal trifft, das ein Roboter mit Rädern nicht durchqueren kann, konfiguriert er seine Räder in Rotoren um, fliegt über die Schlucht auf die andere Seite und rollt dann weiter.
Auf die Frage nach seiner Meinung zum multimodalen mobilen Transformationsroboter M4, der gemeinsam von Caltech und der Northeastern University entwickelt wurde, antworteten Professor Hans W. Lipman, Direktor des Center for Autonomous Systems and Technology (CAST) am Caltech, Professor Mory Mory Gharib (Ph .D. '83) sagte: „Die überragende Leistung von M4 bietet mehr Möglichkeiten für die Erweiterung seiner Anwendungsbereiche. M4 kann außerdem in der Suche, in der Weltraumforschung und in automatischen Paketen in Wohnräumen eingesetzt werden.“ Bereiche wie Verarbeitung und digitale Landwirtschaft spielen eine größere Rolle.“
Das obige ist der detaillierte Inhalt vonDieser in Nature Communications veröffentlichte Roboter ermöglicht es Transformern, Wirklichkeit zu werden. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
















![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



