

Kürzlich hielt Sebastian Raschka, ein bekannter Forscher auf dem Gebiet des Deep Learning und Chefpädagoge für künstliche Intelligenz von Lightning AI, auf der CVPR 2023 eine Keynote zum Thema „Skalierung des PyTorch-Modelltrainings mit minimalen Codeänderungen“.

Um die Forschungsergebnisse mit mehr Menschen zu teilen, hat Sebastian Raschka die Rede in einem Artikel zusammengefasst. Der Artikel untersucht, wie das PyTorch-Modelltraining mit minimalen Codeänderungen skaliert werden kann, und zeigt, dass der Schwerpunkt auf der Nutzung von Mixed-Precision-Methoden und Multi-GPU-Trainingsmodi statt auf Maschinenoptimierungen auf niedriger Ebene liegt.
Der Artikel verwendet Visual Transformer (ViT) als Basismodell. Das ViT-Modell wird mit einem Basisdatensatz von Grund auf neu gestartet. Nach etwa 60 Minuten Training erreicht es eine Genauigkeit von 62 % auf dem Testsatz.
GitHub-Adresse: https://github.com/rasbt/cvpr2023
Das Folgende ist der Originaltext des Artikels:
In Im folgenden Abschnitt wird Sebastian untersuchen, wie man die Trainingszeit und -genauigkeit ohne umfangreiche Code-Umgestaltung verbessern kann.
Bitte beachten Sie, dass die Details des Modells und des Datensatzes hier nicht im Mittelpunkt stehen (sie sollen lediglich so einfach wie möglich sein, damit die Leser sie auf ihren eigenen Computern reproduzieren können, ohne zu viele herunterladen und installieren zu müssen Abhängigkeiten). Alle hier geteilten Beispiele sind auf GitHub zu finden, wo Leser den vollständigen Code erkunden und wiederverwenden können.
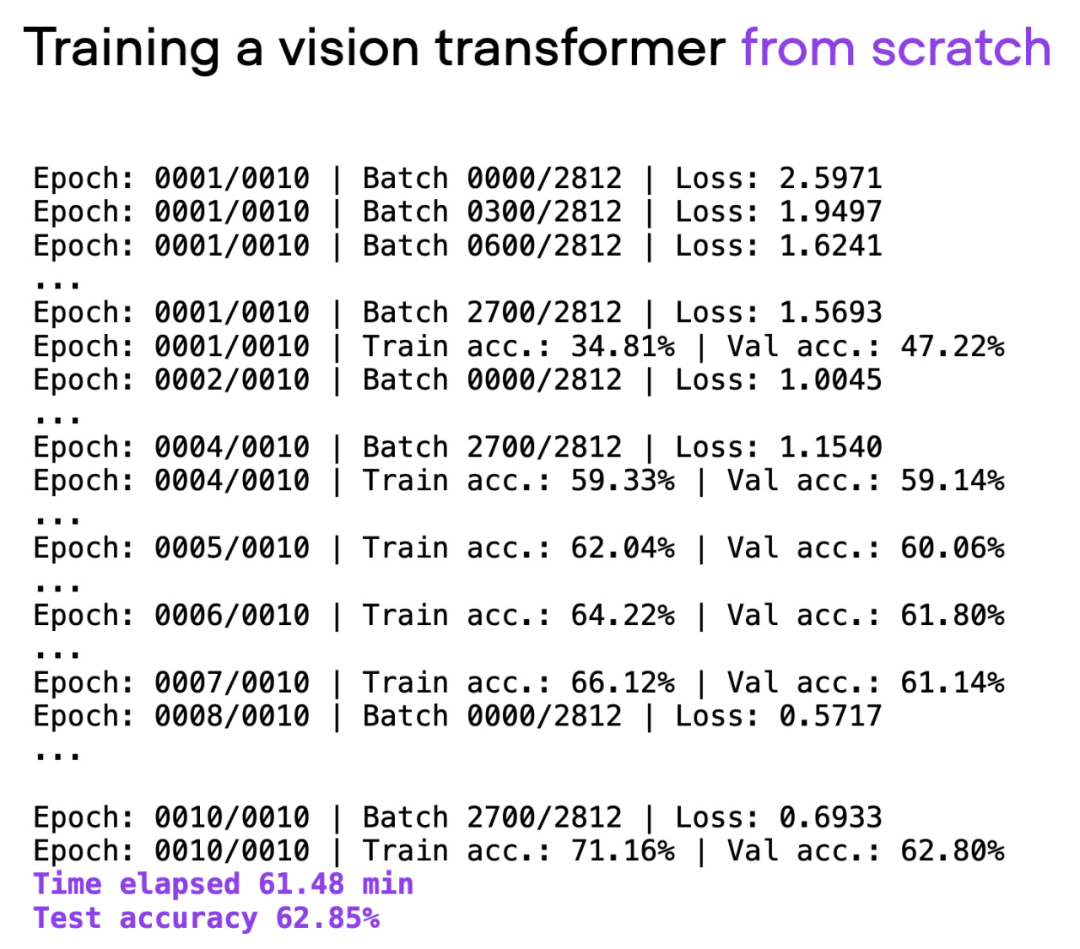
Ausgabe des Skripts 00_pytorch-vit-random-init.py.
Heutzutage ist es oft ineffizient, Deep-Learning-Modelle für Texte oder Bilder von Grund auf zu trainieren. Wir verwenden in der Regel vorab trainierte Modelle und optimieren die Modelle, um Zeit und Rechenressourcen zu sparen und gleichzeitig bessere Modellierungsergebnisse zu erzielen.
Wenn Sie die oben verwendete ViT-Architektur in Betracht ziehen, vorab auf einem anderen Datensatz (ImageNet) trainieren und feinabstimmen, können Sie in kürzerer Zeit eine bessere Vorhersageleistung erzielen: 20 Minuten ( Eine Testgenauigkeit von 95 % war innerhalb von 3 Trainingsepochen erreicht.
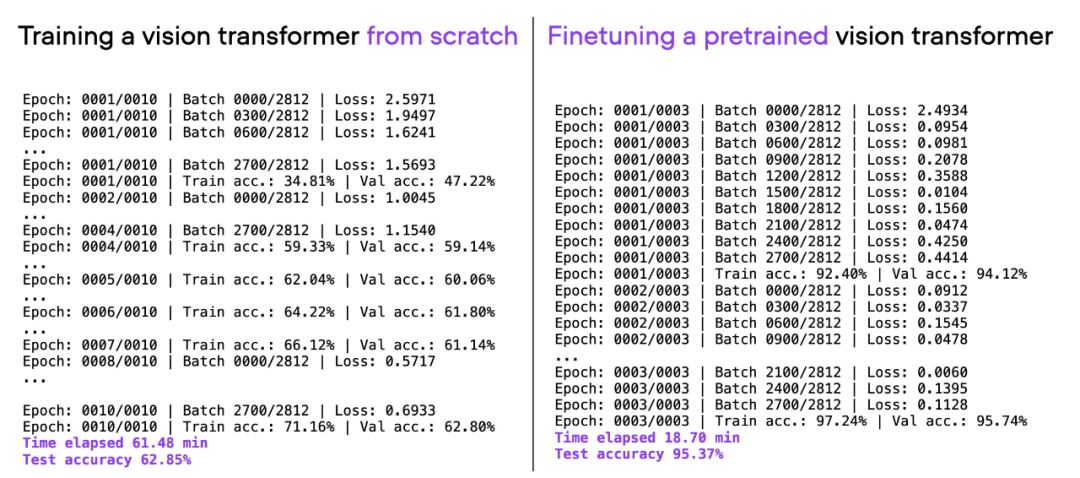
Vergleich von 00_pytorch-vit-random-init.py und 01_pytorch-vit.py.
Wir sehen, dass eine Feinabstimmung die Modellleistung im Vergleich zum Training von Grund auf erheblich verbessern kann. Das folgende Balkendiagramm fasst dies zusammen.
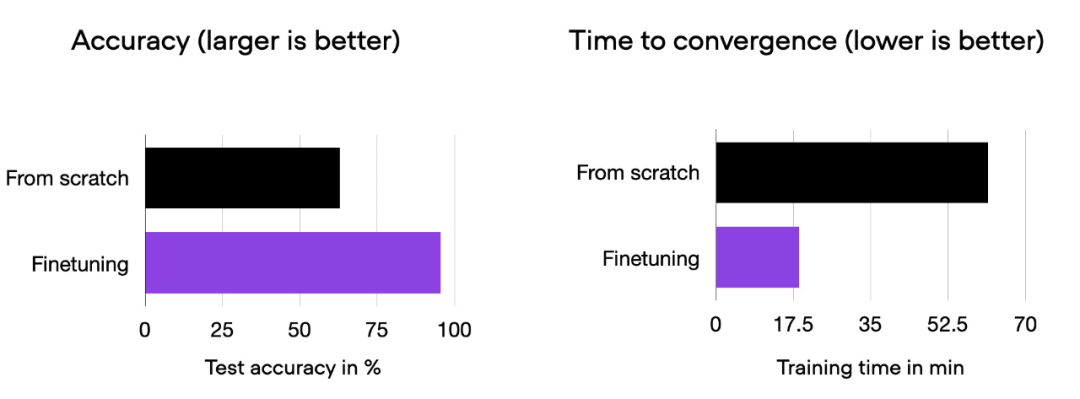
Vergleichshistogramm von 00_pytorch-vit-random-init.py und 01_pytorch-vit.py.
Natürlich kann die Modellleistung je nach Datensatz oder Aufgabe variieren. Für viele Text- und Bildaufgaben lohnt es sich jedoch, mit einem Modell zu beginnen, das auf einem gemeinsamen öffentlichen Datensatz vorab trainiert wurde.
In den nächsten Abschnitten werden verschiedene Techniken untersucht, um die Trainingszeit zu verkürzen, ohne die Vorhersagegenauigkeit zu beeinträchtigen.
Eine Möglichkeit, das Training in PyTorch mit minimalen Codeänderungen effizient zu skalieren, ist die Verwendung der Open-Source-Fabric-Bibliothek, die als leichte Wrapper-Bibliothek/Schnittstelle für PyTorch betrachtet werden kann. Per Pip installieren.
pip install lightning
Alle unten untersuchten Techniken können auch in reinem PyTorch implementiert werden. Fabric möchte diesen Prozess komfortabler gestalten.
Bevor wir uns mit „erweiterten Techniken zur Codebeschleunigung“ befassen, stellen wir zunächst die kleinen Änderungen vor, die zur Integration von Fabric in PyTorch-Code erforderlich sind. Sobald Sie diese Änderungen vorgenommen haben, können Sie die erweiterten PyTorch-Funktionen problemlos nutzen, indem Sie nur eine Codezeile ändern.
Der Unterschied zwischen dem PyTorch-Code und dem für die Verwendung von Fabric modifizierten Code ist subtil und erfordert nur einige geringfügige Änderungen, wie im folgenden Code gezeigt:
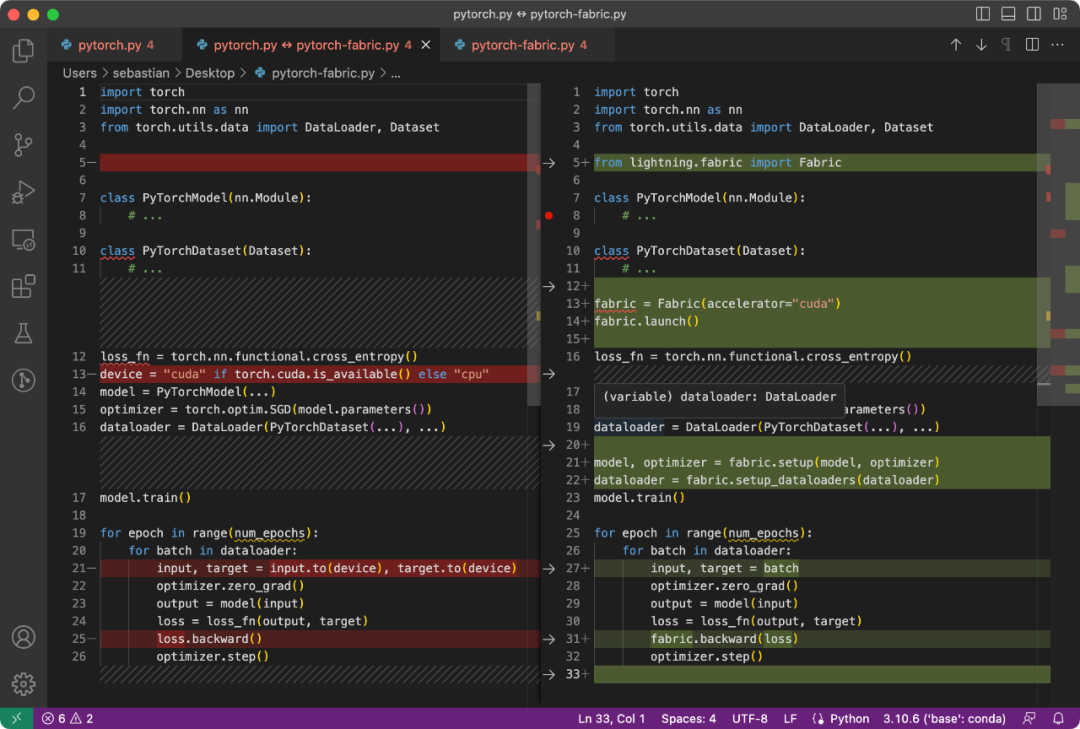
Normaler PyTorch-Code (links) und Verwendung von PyTorch-Code Stoff
总结一下上图,就可以得到普通的 PyTorch 代码转换为 PyTorch+Fabric 的三个步骤:
这些微小的改动提供了一种利用 PyTorch 高级特性的途径,而无需对现有代码进行进一步重构。
深入探讨下面的「高级特性」之前,要确保模型的训练运行时间、预测性能与之前相同。
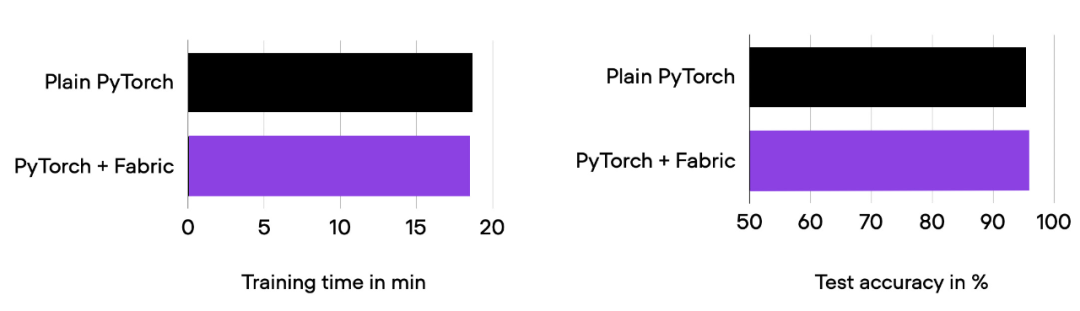
01_pytorch-vit.py 和 03_fabric-vit.py 的比较结果。
正如前面柱状图中所看到的,训练运行时间、准确率与之前完全相同,正如预期的那样。其中,任何波动都可以归因于随机性。
在前面的部分中,我们使用 Fabric 修改了 PyTorch 代码。为什么要费这么大的劲呢?接下来将尝试高级技术,比如混合精度和分布式训练,只需更改一行代码,把下面的代码
fabric = Fabric(accelerator="cuda")
改为
fabric = Fabric(accelerator="cuda", precisinotallow="bf16-mixed")
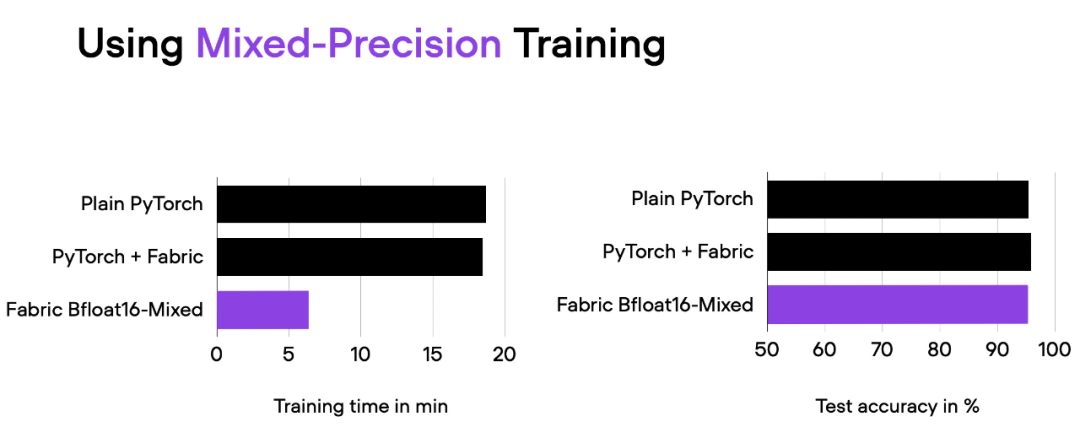
04_fabric-vit-mixed-precision.py 脚本的比较结果。脚本地址:https://github.com/rasbt/cvpr2023/blob/main/04_fabric-vit-mixed-precision.py
通过混合精度训练,我们将训练时间从 18 分钟左右缩短到 6 分钟,同时保持相同的预测性能。这种训练时间的缩短只需在实例化 Fabric 对象时添加参数「precisinotallow="bf16-mixed"」即可实现。
混合精度训练实质上使用了 16 位和 32 位精度,以确保不会损失准确性。16 位表示中的计算梯度比 32 位格式快得多,并且还节省了大量内存。这种策略在内存或计算受限的情况下非常有益。
之所以称为「混合」而不是「低」精度训练,是因为不是将所有参数和操作转换为 16 位浮点数。相反,在训练过程中 32 位和 16 位操作之间切换,因此称为「混合」精度。
如下图所示,混合精度训练涉及步骤如下:
这种方法在保持神经网络准确性和稳定性的同时,实现了高效的训练。
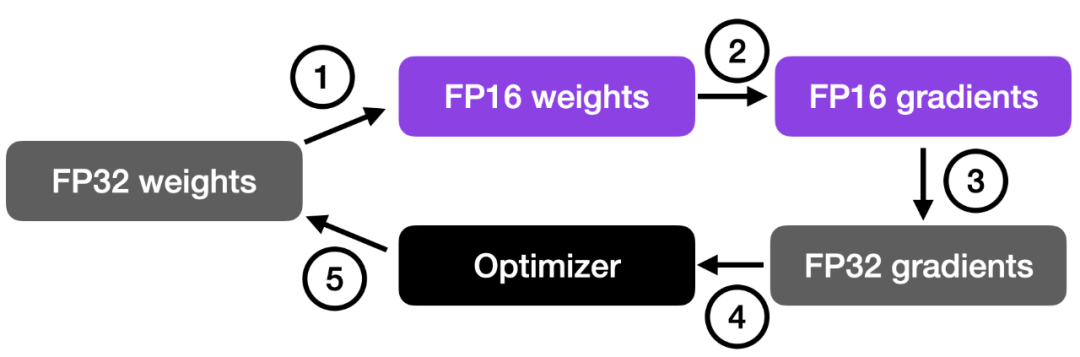
更详细的步骤如下:
步骤 4 中的乘积用于更新原始的 FP32 神经网络权重。学习率有助于控制优化过程的收敛性,对于实现良好的性能非常重要。
前面谈到了「float 16-bit」精度训练。需要注意的是,在之前的代码中,指定了 precisinotallow="bf16-mixed",而不是 precisinotallow="16-mixed"。这两个都是有效的选项。
在这里,"bf16-mixed" 中的「bf16」表示 Brain Floating Point(bfloat16)。谷歌开发了这种格式,用于机器学习和深度学习应用,尤其是在张量处理单元(TPU)中。Bfloat16 相比传统的 float16 格式扩展了动态范围,但牺牲了一定的精度。
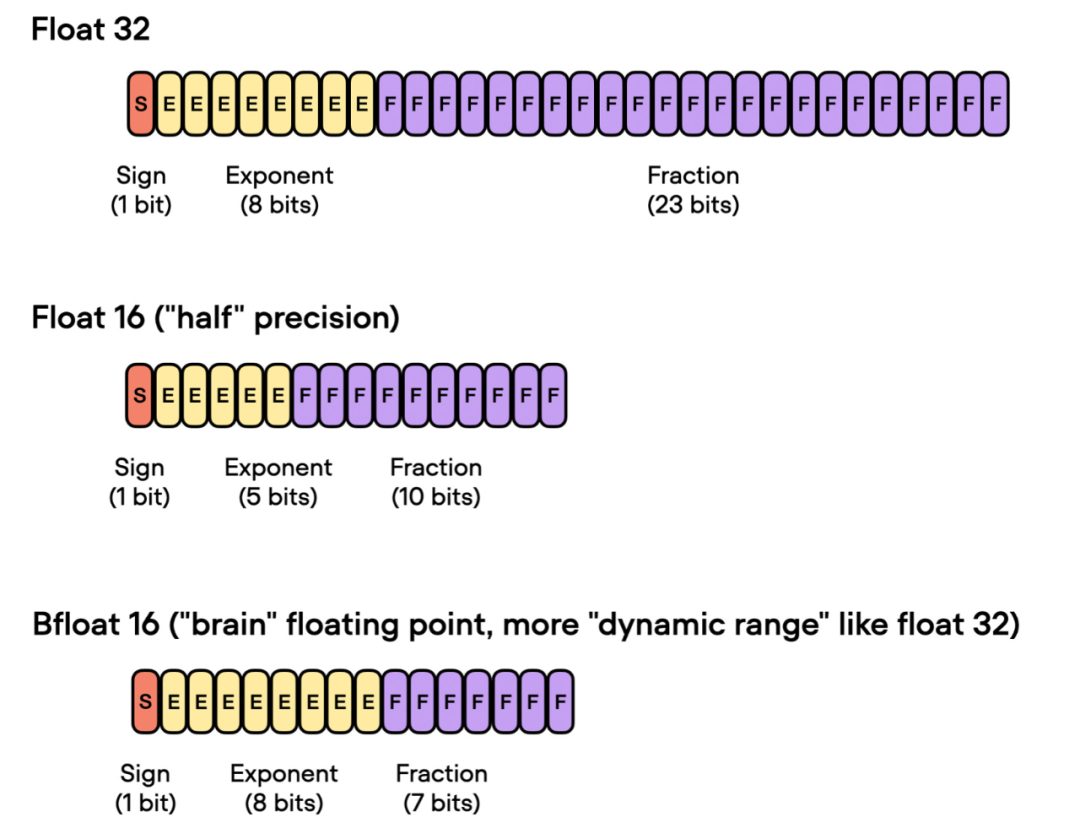
扩展的动态范围使得 bfloat16 能够表示非常大和非常小的数字,使其更适用于深度学习应用中可能遇到的数值范围。然而,较低的精度可能会影响某些计算的准确性,或在某些情况下导致舍入误差。但在大多数深度学习应用中,这种降低的精度对建模性能的影响很小。
虽然 bfloat16 最初是为 TPU 开发的,但从 NVIDIA Ampere 架构的 A100 Tensor Core GPU 开始,已经有几种 NVIDIA GPU 开始支持 bfloat16。
我们可以使用下面的代码检查 GPU 是否支持 bfloat16:
>>> torch.cuda.is_bf16_supported()True
如果你的 GPU 不支持 bfloat16,可以将 precisinotallow="bf16-mixed" 更改为 precisinotallow="16-mixed"。
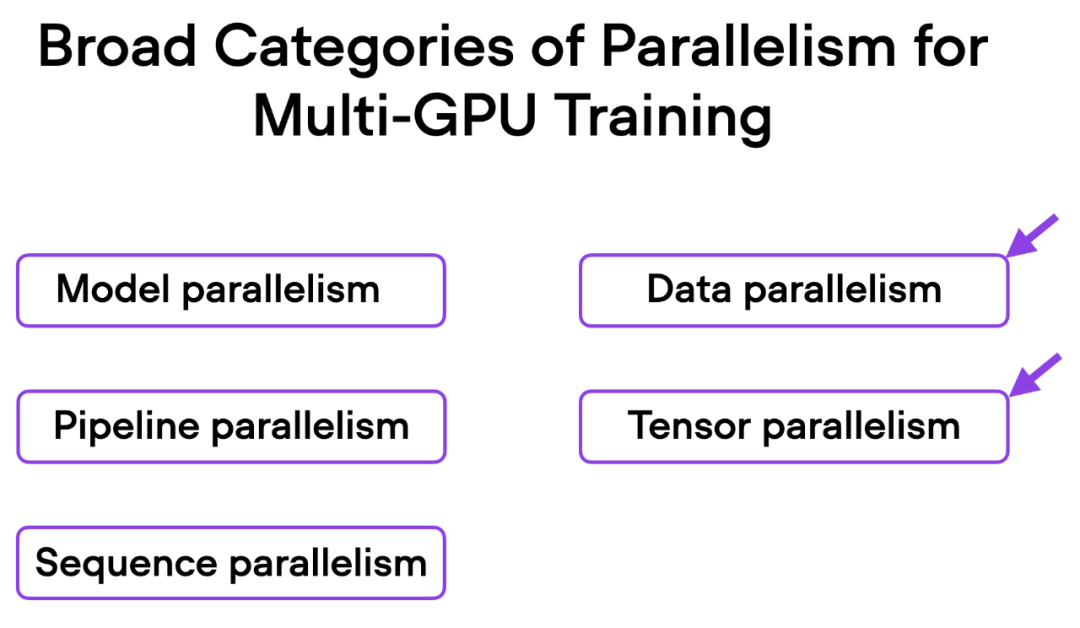
接下来要尝试修改多 GPU 训练。如果我们有多个 GPU 可供使用,这会带来好处,因为它可以让我们的模型训练速度更快。
这里介绍一种更先进的技术 — 完全分片数据并行(Fully Sharded Data Parallelism (FSDP)),它同时利用了数据并行性和张量并行性。
在 Fabric 中,我们可以通过下面的方式利用 FSDP 添加设备数量和多 GPU 训练策略:
fabric = Fabric(accelerator="cuda", precisinotallow="bf16-mixed",devices=4, strategy="FSDP"# new!)
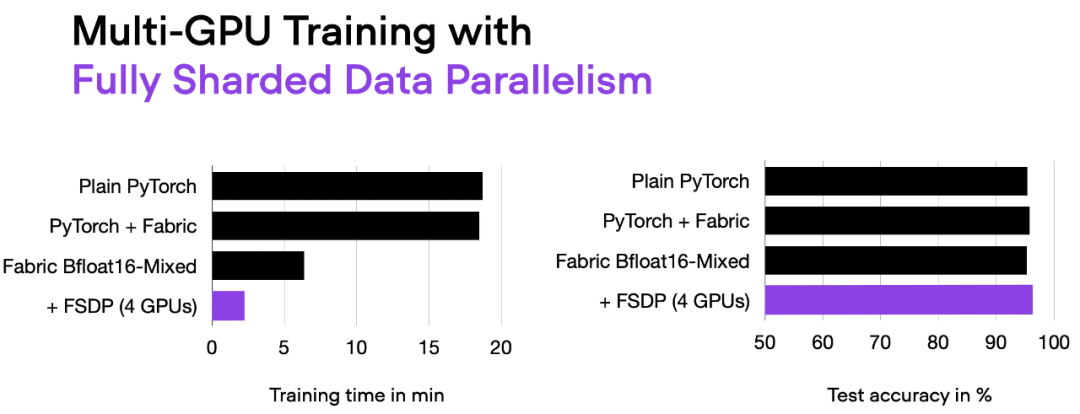
06_fabric-vit-mixed-fsdp.py 脚本的输出。
现在使用 4 个 GPU,我们的代码运行时间大约为 2 分钟,是之前仅使用混合精度训练时的近 3 倍。
在数据并行中,小批量数据被分割,并且每个 GPU 上都有模型的副本。这个过程通过多个 GPU 的并行工作来加速模型的训练速度。
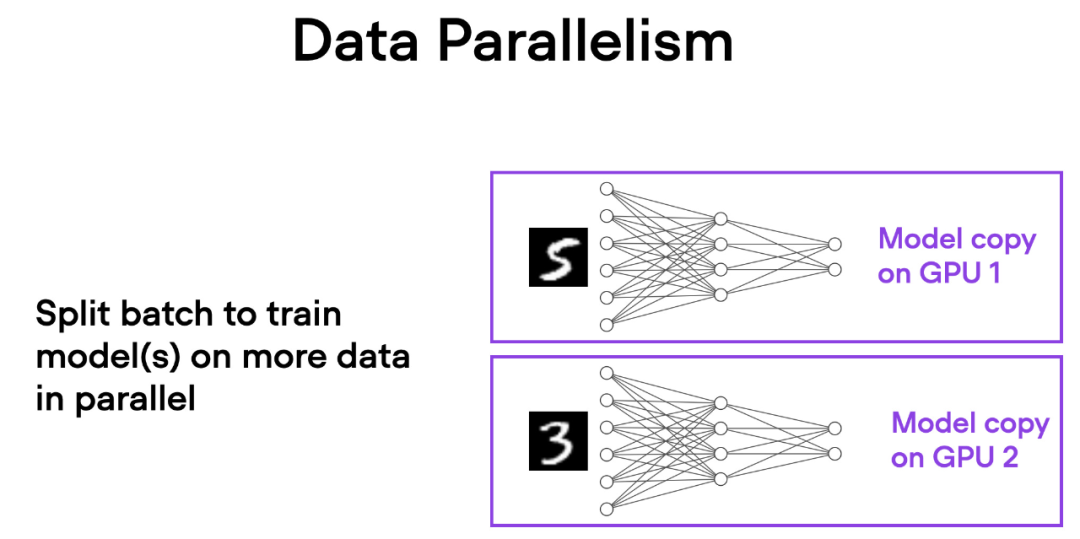
如下简要概述了数据并行的工作原理:
每个 GPU 都在并行地处理不同的数据子集,通过梯度的平均化和参数的更新,整个模型的训练过程得以加速。
这种方法的主要优势是速度。由于每个 GPU 同时处理不同的小批量数据,模型可以在更短的时间内处理更多的数据。这可以显著减少训练模型所需的时间,特别是在处理大型数据集时。
然而,数据并行也有一些限制。最重要的是,每个 GPU 必须具有完整的模型和参数副本。这限制了可以训练的模型大小,因为模型必须适应单个 GPU 的内存。这对于现代的 ViTs 或 LLMs 来说这是不可行的。
与数据并行不同,张量并行将模型本身划分到多个 GPU 上。并且在数据并行中,每个 GPU 都需要适 应整个模型,这在训练较大的模型时可能成为一个限制。而张量并行允许训练那些对单个 GPU 而言可能过大的模型,通过将模型分解并分布到多个设备上进行训练。
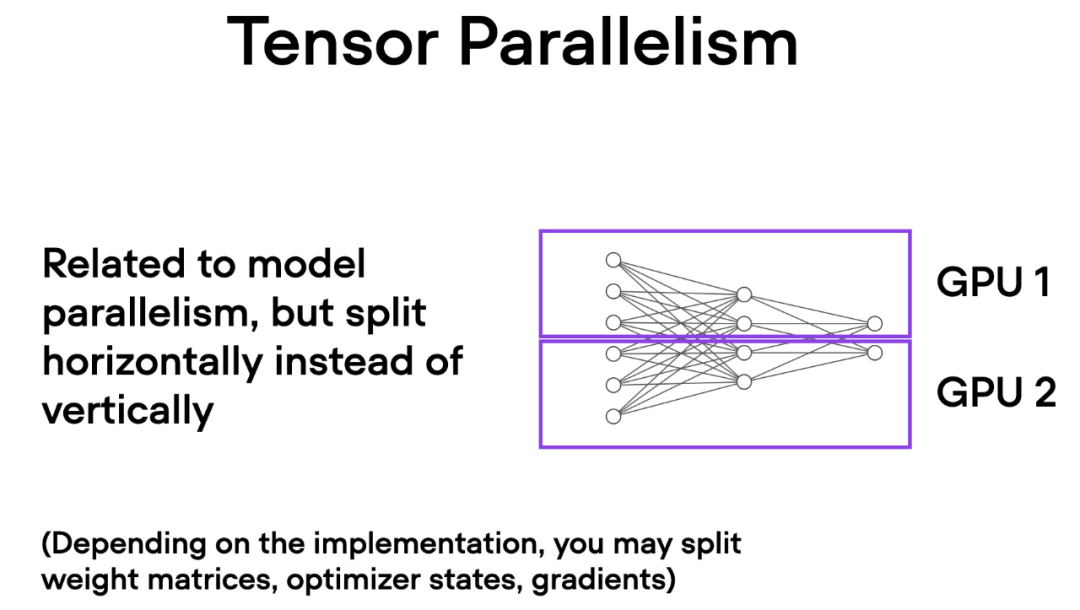
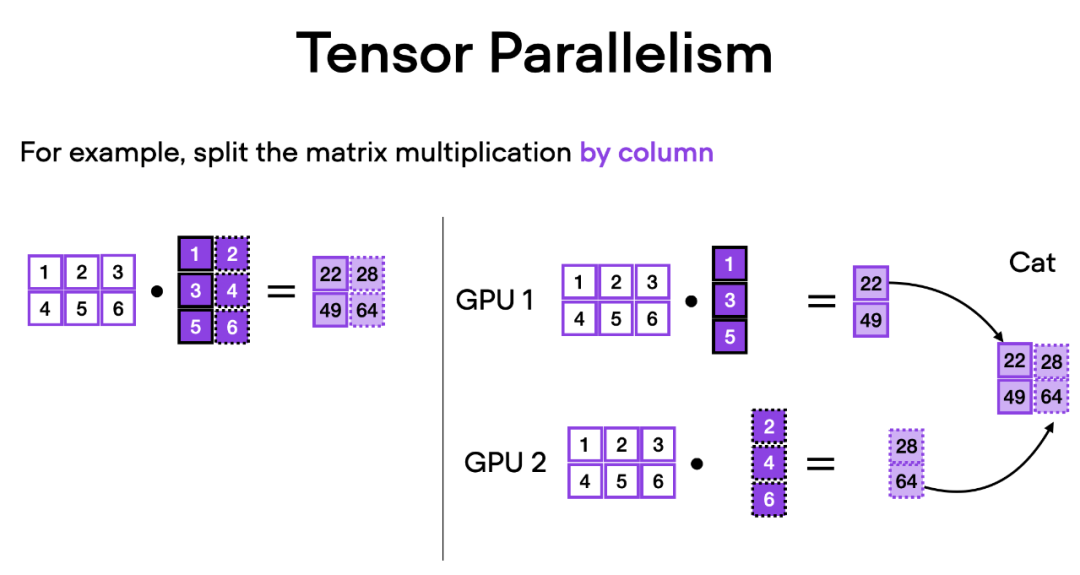
Wie funktioniert Tensorparallelität? Wenn man über die Matrixmultiplikation nachdenkt, gibt es zwei Möglichkeiten, verteilte Berechnungen durchzuführen – zeilenweise oder spaltenweise. Betrachten Sie der Einfachheit halber die Verteilungsberechnungen nach Spalten. Beispielsweise können wir eine große Matrixmultiplikationsoperation in mehrere unabhängige Berechnungen zerlegen, die jeweils auf einer anderen GPU ausgeführt werden können, wie in der folgenden Abbildung dargestellt. Die Ergebnisse werden dann verkettet, um die Ergebnisse zu erhalten, wodurch die Rechenlast effektiv verteilt wird.
Das obige ist der detaillierte Inhalt vonDurch die Änderung einer Codezeile ist das PyTorch-Training dreimal schneller. Diese „fortschrittlichen Technologien' sind der Schlüssel. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Fehler beim Herstellen der Verbindung zum Apple-ID-Server
Fehler beim Herstellen der Verbindung zum Apple-ID-Server
 Warum kann win11 nicht installiert werden?
Warum kann win11 nicht installiert werden?
 InvocationTargetException-Ausnahmebehandlung
InvocationTargetException-Ausnahmebehandlung
 So kündigen Sie die automatische Verlängerung bei Station B
So kündigen Sie die automatische Verlängerung bei Station B
 Drivermanager.getconnection
Drivermanager.getconnection
 So lösen Sie das Problem, dass die DLL nicht geladen werden kann
So lösen Sie das Problem, dass die DLL nicht geladen werden kann
 App-Testtools
App-Testtools
 Einführung in die Eigenschaften des virtuellen Raums
Einführung in die Eigenschaften des virtuellen Raums








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



