
 Technologie-Peripheriegeräte
IT Industrie
Die Menschen in Kalifornien bedauern zutiefst: Die Zuverlässigkeit des autonomen Fahrens ist wirklich besorgniserregend, und die Folter unbemannter Taxis ist schmerzhaft
Technologie-Peripheriegeräte
IT Industrie
Die Menschen in Kalifornien bedauern zutiefst: Die Zuverlässigkeit des autonomen Fahrens ist wirklich besorgniserregend, und die Folter unbemannter Taxis ist schmerzhaft
Die Menschen in Kalifornien bedauern zutiefst: Die Zuverlässigkeit des autonomen Fahrens ist wirklich besorgniserregend, und die Folter unbemannter Taxis ist schmerzhaft

Am 11. August hielt Kalifornien, die konservativste Region der Vereinigten Staaten, eine Anhörung ab, um zu diskutieren, ob fahrerlose Taxis legal auf der Straße fahren dürfen. Nach 6 Stunden Debatte errangen die Befürworter des autonomen Fahrens mit einer Abstimmung von 3:1 einen Erdrutschsieg.
Cruise-CEO Kyle Vogt In San Francisco wurde bekannt gegeben, dass in den nächsten 6 Monaten Tausende von Taxis auf den Markt kommen werden, die die L4-Technologie für autonomes Fahren unterstützen Bereitstellung von Allwetterdiensten für die Anwohner

Allerdings bereute der Flughafen Kalifornien eine Woche nach der Aufhebung des Verbots für fahrerlose Taxis seine Entscheidung und erließ sofort strenge Kontrollmaßnahmen. Überraschenderweise: Was haben fahrerlose Taxis in nur einer Woche bewirkt, dass das kalifornische Kraftfahrzeugministerium so verärgert ist?
In einer Woche Autonomes Fahren macht die Einwohner Kaliforniens verrückt
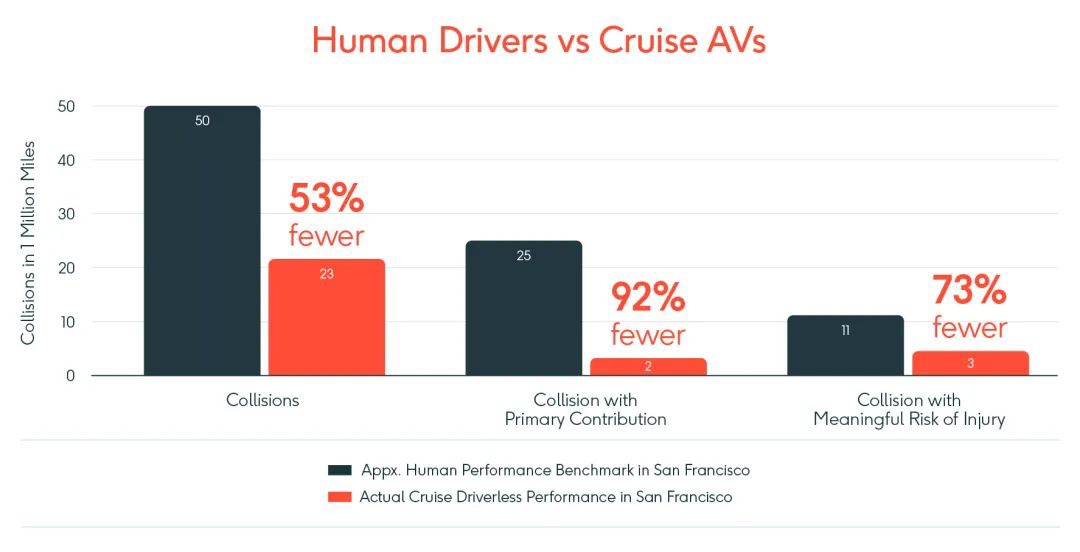
Um die kalifornische Regierung davon zu überzeugen, fahrerlose Taxis auf die Straße zu bringen, stellte Cruise eine große Datenmenge zur Verfügung, um die Sicherheit fahrerloser Taxis zu beweisen. Aber das Ergebnis war ...
Eine Woche, nachdem das selbstfahrende Taxi Cruise in Kalifornien auf die Straße kam, ereigneten sich zunächst einige typische Fälle Letzten Donnerstagabend kollidierte ein unbemanntes Taxi. Ein Taxi kollidierte an einer Kreuzung mit einem Feuerwehrauto. Glücklicherweise war der Unfall nicht schwerwiegend. Die Passagiere wurden unter dem Schutz der Airbags nicht ernsthaft verletzt und konnten rechtzeitig ins Krankenhaus gebracht werden.
In diesem Zusammenhang erklärte Cruise, dass das Auto das Feuerwehrauto erkannt und identifiziert und Maßnahmen ergriffen habe. Wir müssen Sofortmaßnahmen ergreifen, aber weil wir an einem Scheideweg stehen, können wir den Unfall nicht vermeiden. (Fotoquelle: Cruise) Okay, ich denke, Sie haben einen Grund dafür, aber was ist mit der nächsten Frage?
Am selben Tag prallte ein fahrerloses Cruise-Taxi versehentlich auf eine im Bau befindliche Straße und blieb fest im Beton stecken. Da es sich bei AI schließlich nicht um eine reale Person handelt, kann sie nicht beurteilen, ob der Zement getrocknet ist, das Taxiunternehmen ist aber trotzdem in die Sache verwickelt
Natürlich sollte die Hauptverantwortung bei der Straßenverwaltung und den Straßenbauunternehmen liegen, denn Sie haben auf der Straßenbaustelle keine Isolationseinrichtungen eingerichtet. Schuld daran sind Taxiunternehmen, weil ihre Karten keine Straßenbaudaten erfasst haben. Sie wissen, dass fast alle Online-Kartenplattformen in China neben dem offiziellen Vermessungs- und Kartierungspersonal auch Straßeninformationen hochladen können. Da Sie sich für die Entwicklung des autonomen Fahrens entschieden haben, sollten Sie dies nicht ignorieren Punkt
 Letzten Freitag war Cruise in Schwierigkeiten. Das größte Problem trat auf, als zehn Autos plötzlich an der Kreuzung stehen blieben und die gesamte Straße für mehr als 20 Minuten blockiert war. Die Erklärung von Cruise lautet, dass vor Ort ein Musikfestival stattfand, das das Signal des fahrerlosen Taxis störte, was dazu führte, dass das Fahrzeug Daten verlor.
Letzten Freitag war Cruise in Schwierigkeiten. Das größte Problem trat auf, als zehn Autos plötzlich an der Kreuzung stehen blieben und die gesamte Straße für mehr als 20 Minuten blockiert war. Die Erklärung von Cruise lautet, dass vor Ort ein Musikfestival stattfand, das das Signal des fahrerlosen Taxis störte, was dazu führte, dass das Fahrzeug Daten verlor. 18. August, Flughafen Kalifornien Die EMU erließ eine Anordnung, um die Anzahl der fahrerlosen Online-Mitfahrdienste von Cruise im Raum San Francisco zu begrenzen. Tagsüber sind nicht mehr als 50 Fahrzeuge und nachts 150 Fahrzeuge erlaubt. Gleichzeitig leitete die Behörde auch eine Untersuchung gegen Cruise ein und entzieht dem Unternehmen möglicherweise die Lizenz zum Betrieb fahrerloser Taxis. Auch wenn Waymo, ein anderes Taxiunternehmen, dieses Mal nicht allzu viele Unfälle aufgedeckt hat, hatte es beispielsweise bereits viele Probleme Im Jahr 2018 ereignete sich der erste Fall, bei dem ein selbstfahrendes Auto eine Person anfuhr und tötete, und es kollidierte Dutzende Male mit Feuerwehrautos. Umgeschriebener Inhalt: Obwohl das Taxiunternehmen Waymo dieses Mal nicht allzu viele Unfälle aufgedeckt hat, kam es bereits zu vielen Problemen, wie zum Beispiel dem ersten tödlichen Unfall, bei dem ein fahrerloses Auto eine Person im Jahr 2018 angefahren hat, und einem Unfall mit einem Feuerwehrauto
Innerhalb einer Woche hat die autonome Fahrtechnologie viele Probleme aufgedeckt, von denen viele mit der Sicherheit zusammenhängen. In den letzten Jahren haben viele Länder auf der ganzen Welt damit begonnen, kommerzielle autonome Fahrtechnologie zu fördern. Doch wie können wir angesichts so vieler Probleme das autonome Fahren mit Zuversicht nutzen?
Autonomes Fahren ist auf dem Weg in die Zukunft, Es gibt noch viele Schwierigkeiten zu überwinden
Autos rasen mit Geschwindigkeiten von Dutzenden oder Hunderten von Kilometern pro Stunde vorbei zu Opfern führen. Deshalb legen wir natürlich mehr Wert auf Sicherheitsfragen
Um autonomes Fahren zu erreichen, müssen wir zunächst Daten über Sensoren sammeln, dann müssen wir den Chip mit dem Prozessor kombinieren und Anweisungen erteilen. Aus Sicherheitsgründen gilt: Je mehr Sensoren, desto besser und je genauer die gesammelten Daten, desto besser. Eine große Anzahl hochpräziser Sensoren wird jedoch den Chip stärker belasten, ganz zu schweigen von Kostenproblemen
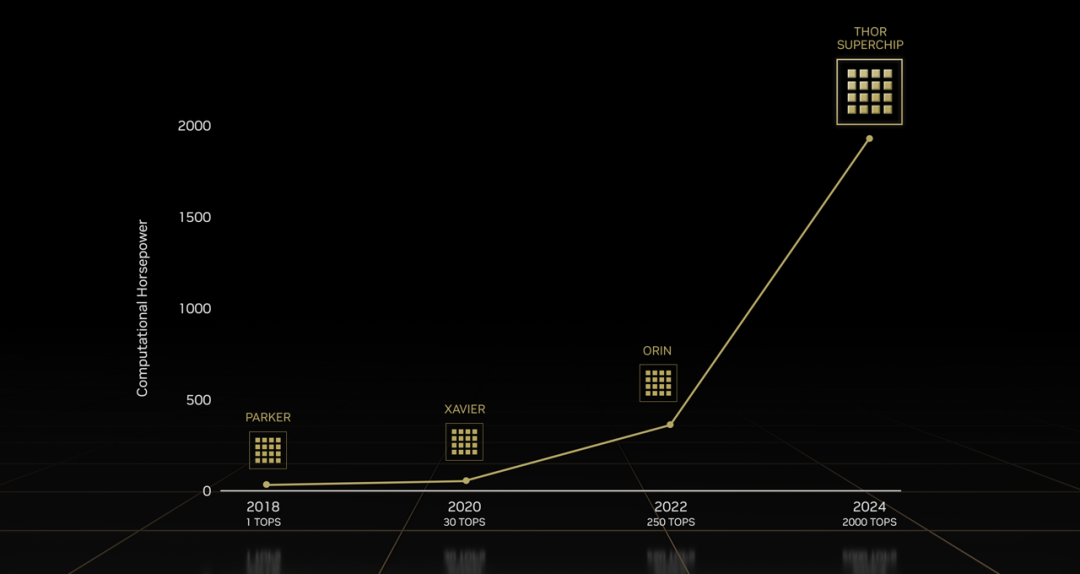
Nachdem Intel, Nvidia und Qualcomm in die Automobilindustrie eingestiegen sind, entwickeln sie Hochleistungschips. Unter anderem hat die Rechenleistung des von NVIDIA eingeführten Thor-Chips 2000 Billionen Mal pro Sekunde (2000TOPS) erreicht Es ist durchaus üblich, dass einige Fahrzeuge mit einem Preis unter 150.000 Yuan mit diesen Radargeräten ausgestattet werden. Die Kosten für Lidar sind relativ hoch und derzeit sind nur einige Mid- bis High-End-Modelle damit ausgestattet. Inländische Unternehmen wie Huawei und Hesai untersuchen, wie die Kosten für Lidar gesenkt werden können, und hoffen, dass auch Low-End-Modelle die Möglichkeit haben, Lidar zu nutzen auf Vision-Lösungen reicht aus, um autonomes Fahren zu erreichen. Beispielsweise wurden beim kommenden neuen Modell 3 von Tesla alle Radargeräte abgeschafft. Allerdings übersteigt die Komplexität des menschlichen Körpers bei weitem die jeglicher Maschine und künstlicher Intelligenz, und die Vorstellungskraft des Gehirns wird von Computern nicht erreicht. Darüber hinaus beschränkt sich die Art und Weise, wie wir Umweltinformationen sammeln, nicht nur auf die Augen, sondern verfügt auch über viele Organe, die für die Erfassung von Hör-, Tast- und anderen Informationen verantwortlich sind Radarlösung, entweder reine Sicht oder kombinierte Sicht aus Kamera und Radar. Reine Vision-Lösungen stellen sehr hohe Anforderungen an Algorithmen. Selbst autonome Fahrlösungen mit Radar können die Sicherheit nicht gewährleisten, geschweige denn reine Vision + Algorithmen. Unfälle mit Tesla-Autopiloten kommen häufig vor
Einige inländische Unternehmen haben erkannt, dass es derzeit unmöglich ist, einen Autopiloten auf L5-Niveau zu erreichen, indem man sich ausschließlich auf Sensoren verlässt, egal wie hervorragend der Algorithmus ist. Daher haben diese Unternehmen Lösungen wie hochpräzise Karten und die Zusammenarbeit zwischen Fahrzeug und Straße auf den Markt gebracht. Unter anderem erfordern hochpräzise Karten eine kontinuierliche zentimetergenaue Kartierung von Straßendaten, ohne dass Straßeninformationen in Echtzeit erfasst werden müssen, wodurch die Belastung des Chips verringert wird.
 Die Zusammenarbeit zwischen Fahrzeug und Straße besteht darin, Kameras hinzuzufügen Gebiete mit komplexen Straßenverhältnissen und Verkehrsstaus sowie das Sammeln von Autokameras und Radargeräten. Anschließend werden nicht nachweisbare Informationen an das Auto gesendet, um die Fahrsicherheit zu verbessern.
Die Zusammenarbeit zwischen Fahrzeug und Straße besteht darin, Kameras hinzuzufügen Gebiete mit komplexen Straßenverhältnissen und Verkehrsstaus sowie das Sammeln von Autokameras und Radargeräten. Anschließend werden nicht nachweisbare Informationen an das Auto gesendet, um die Fahrsicherheit zu verbessern. Autonomes Fahren sollte wieder in den Käfig gesteckt werden Das Fahren scheint sehr ausgereift zu sein, es bedarf nur eines Wortes der zuständigen Abteilung und kann sofort kommerziell genutzt werden. Dies ist jedoch nicht der Fall. Das derzeitige kommerzielle autonome Fahren behandelt einige Verbraucher nur als Testpersonen. Was die Frage betrifft, ob autonomes Fahren für den kommerziellen Einsatz geöffnet werden sollte, ist Xiaotong der Ansicht, dass es vorsichtig gefördert werden sollte und nicht zu ungeduldig sein sollte. Derzeit haben viele Autohersteller fortschrittliche Fahrassistenzsysteme wie Huawei ADS und Xpeng -Ende der unterstützten Fahrfunktionen. Auch wenn das autonome Fahren große Zukunftsaussichten hat, sollte man es vorerst noch auf das experimentelle Stadium beschränken. Schließlich ist das Leben eines jeden kostbar und sollte kein Versuchskaninchen für selbstfahrende Unternehmen und Automobilhersteller sein Betrieb selbstfahrender Online-Ride-Hailing-Dienste. Obwohl es derzeit nur in einem kleinen Bereich betrieben werden kann, ist der Preis sehr erschwinglich. Wenn Sie die Möglichkeit haben, können Sie es selbst erleben
Wenn diese Automobilhersteller genügend Daten sammeln und bereit sind, die Verantwortung für Unfälle zu übernehmen, um die Sicherheit der Verbraucher zu gewährleisten, kann die Technologie des autonomen Fahrens wirklich in Tausende von Haushalten Einzug halten
Dieser Inhalt stammt vom öffentlichen WeChat-Konto: Dianchetong (ID: dianchetong233) , der Autor ist Lost Soul Yin
Werbeerklärung: Dieser Artikel enthält externe Sprunglinks (einschließlich, aber nicht beschränkt auf Hyperlinks, QR-Codes, Passwörter usw.), die darauf abzielen, mehr Informationen bereitzustellen und Screening-Ergebnisse zu sparen. Nur als Referenz . Bitte beachten Sie, dass alle Artikel auf dieser Website diese Aussage enthalten
Das obige ist der detaillierte Inhalt vonDie Menschen in Kalifornien bedauern zutiefst: Die Zuverlässigkeit des autonomen Fahrens ist wirklich besorgniserregend, und die Folter unbemannter Taxis ist schmerzhaft. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Oben geschrieben und persönliches Verständnis des Autors. Dreidimensionales Gaussplatting (3DGS) ist eine transformative Technologie, die in den letzten Jahren in den Bereichen explizite Strahlungsfelder und Computergrafik entstanden ist. Diese innovative Methode zeichnet sich durch die Verwendung von Millionen von 3D-Gaußkurven aus, was sich stark von der Neural Radiation Field (NeRF)-Methode unterscheidet, die hauptsächlich ein implizites koordinatenbasiertes Modell verwendet, um räumliche Koordinaten auf Pixelwerte abzubilden. Mit seiner expliziten Szenendarstellung und differenzierbaren Rendering-Algorithmen garantiert 3DGS nicht nur Echtzeit-Rendering-Fähigkeiten, sondern führt auch ein beispielloses Maß an Kontrolle und Szenenbearbeitung ein. Dies positioniert 3DGS als potenziellen Game-Changer für die 3D-Rekonstruktion und -Darstellung der nächsten Generation. Zu diesem Zweck geben wir erstmals einen systematischen Überblick über die neuesten Entwicklungen und Anliegen im Bereich 3DGS.
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
0. Vorab geschrieben&& Persönliches Verständnis, dass autonome Fahrsysteme auf fortschrittlichen Wahrnehmungs-, Entscheidungs- und Steuerungstechnologien beruhen, indem sie verschiedene Sensoren (wie Kameras, Lidar, Radar usw.) verwenden, um die Umgebung wahrzunehmen, und Algorithmen und Modelle verwenden für Echtzeitanalysen und Entscheidungsfindung. Dies ermöglicht es Fahrzeugen, Verkehrszeichen zu erkennen, andere Fahrzeuge zu erkennen und zu verfolgen, das Verhalten von Fußgängern vorherzusagen usw. und sich so sicher an komplexe Verkehrsumgebungen anzupassen. Diese Technologie erregt derzeit große Aufmerksamkeit und gilt als wichtiger Entwicklungsbereich für die Zukunft des Transportwesens . eins. Aber was autonomes Fahren schwierig macht, ist herauszufinden, wie man dem Auto klarmachen kann, was um es herum passiert. Dies erfordert, dass der dreidimensionale Objekterkennungsalgorithmus im autonomen Fahrsystem Objekte in der Umgebung, einschließlich ihrer Standorte, genau wahrnehmen und beschreiben kann.
 Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Der erste Pilot- und Schlüsselartikel stellt hauptsächlich mehrere häufig verwendete Koordinatensysteme in der autonomen Fahrtechnologie vor und erläutert, wie die Korrelation und Konvertierung zwischen ihnen abgeschlossen und schließlich ein einheitliches Umgebungsmodell erstellt werden kann. Der Schwerpunkt liegt hier auf dem Verständnis der Umrechnung vom Fahrzeug in den starren Kamerakörper (externe Parameter), der Kamera-in-Bild-Konvertierung (interne Parameter) und der Bild-in-Pixel-Einheitenkonvertierung. Die Konvertierung von 3D in 2D führt zu entsprechenden Verzerrungen, Verschiebungen usw. Wichtige Punkte: Das Fahrzeugkoordinatensystem und das Kamerakörperkoordinatensystem müssen neu geschrieben werden: Das Ebenenkoordinatensystem und das Pixelkoordinatensystem. Schwierigkeit: Sowohl die Entzerrung als auch die Verzerrungsaddition müssen auf der Bildebene kompensiert werden. 2. Einführung Insgesamt gibt es vier visuelle Systeme Koordinatensystem: Pixelebenenkoordinatensystem (u, v), Bildkoordinatensystem (x, y), Kamerakoordinatensystem () und Weltkoordinatensystem (). Es gibt eine Beziehung zwischen jedem Koordinatensystem,
 Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Die Trajektorienvorhersage spielt eine wichtige Rolle beim autonomen Fahren. Unter autonomer Fahrtrajektorienvorhersage versteht man die Vorhersage der zukünftigen Fahrtrajektorie des Fahrzeugs durch die Analyse verschiedener Daten während des Fahrvorgangs. Als Kernmodul des autonomen Fahrens ist die Qualität der Trajektorienvorhersage von entscheidender Bedeutung für die nachgelagerte Planungssteuerung. Die Trajektorienvorhersageaufgabe verfügt über einen umfangreichen Technologie-Stack und erfordert Vertrautheit mit der dynamischen/statischen Wahrnehmung des autonomen Fahrens, hochpräzisen Karten, Fahrspurlinien, Fähigkeiten in der neuronalen Netzwerkarchitektur (CNN&GNN&Transformer) usw. Der Einstieg ist sehr schwierig! Viele Fans hoffen, so schnell wie möglich mit der Flugbahnvorhersage beginnen zu können und Fallstricke zu vermeiden. Heute werde ich eine Bestandsaufnahme einiger häufiger Probleme und einführender Lernmethoden für die Flugbahnvorhersage machen! Einführungsbezogenes Wissen 1. Sind die Vorschaupapiere in Ordnung? A: Schauen Sie sich zuerst die Umfrage an, S
 SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
Originaltitel: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper-Link: https://arxiv.org/pdf/2402.02519.pdf Code-Link: https://github.com/HKUST-Aerial-Robotics/SIMPL Autor: Hong Kong University of Science und Technologie DJI-Papieridee: Dieses Papier schlägt eine einfache und effiziente Bewegungsvorhersagebasislinie (SIMPL) für autonome Fahrzeuge vor. Im Vergleich zum herkömmlichen Agent-Cent
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
