

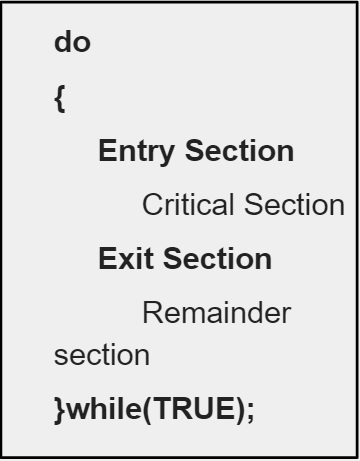
Prozesssynchronisierung ist eine Technologie, die das Problem des gleichzeitigen Zugriffs auf gemeinsam genutzte Daten löst, der zu Dateninkonsistenzen führen kann. Kollaborierende Prozesse beziehen sich auf Prozesse, die andere Prozesse beeinflussen oder von anderen Prozessen beeinflusst werden können, was zu inkonsistenten Prozessdaten führt. Daher ist eine Prozesssynchronisierung erforderlich, um die Datenkonsistenz sicherzustellen.
Präemptiver Kernel
– Ein präemptiver Kernel ermöglicht es, einen Prozess zu präemptivieren, während der Prozess präemptiv ausgeführt wird. Läuft im Kernel-Modus.
Nicht-präemptiver Kernel– Ein nicht-präemptiver Kernel lässt nicht zu, dass Prozesse, die im Kernel-Modus ausgeführt werden, präemptiv ausgeführt werden. Petersons Lösung
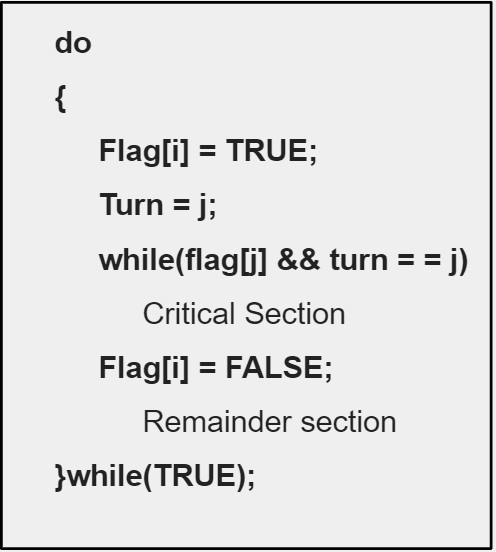
Wenn turn == i bedeutet, dass der Prozess Pi seinen kritischen Abschnitt betreten darf.
Wenn Flag[j] TRUE ist, bedeutet dies, dass Prozess j bereit ist, in seinen kritischen Abschnitt einzutreten.
Das Folgende ist die Struktur von Prozess P in der Peterson-Lösung.
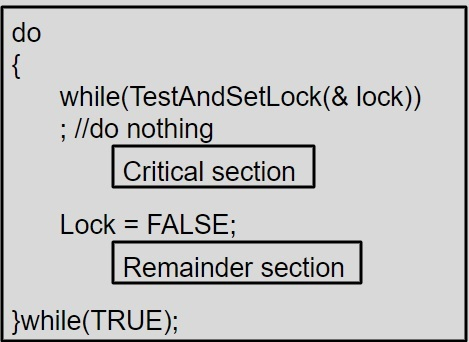
Immer wenn ein Prozess versucht, den kritischen Abschnitt zu betreten, muss er den Sperrwert abfragen. Wenn der Wert von lock 1 ist, müssen sie warten, bis sich der Wert von lock nicht auf 0 ändert.
Im Folgenden ist die sich gegenseitig ausschließende Implementierung von TestAndSet() dargestellt. Das Semaphor S ist eine ganzzahlige Variable, auf die über die beiden atomaren Standardoperationen wait() und signal() zugegriffen werden kann Während ein Prozess den Wert eines Semaphors ändert, können andere Prozesse nicht gleichzeitig mit demselben Semaphorwert arbeiten.Im Folgenden ist die Implementierung des gegenseitigen Ausschlusses mithilfe von Semaphoren aufgeführt.
Betriebssysteme verwenden zwei Arten von Semaphoren:
Semaphore zählen
- Dieser Semaphortyp. Der Wert kann innerhalb einer unbegrenzten Domäne variierenBinäres Semaphor
– Der Wert dieses Semaphortyps kann zwischen 0 und 1 variieren. Sie werden auch Mutex-Sperren genannt. Es wird vom Betriebssystem verwendet, um kritische Abschnittsprobleme in mehreren Prozessen zu lösen.Das obige ist der detaillierte Inhalt vonProzesssynchronisation in C/C++. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Ist die Geschwindigkeit von PHP8.0 verbessert?
Ist die Geschwindigkeit von PHP8.0 verbessert?
 Der Windows Explorer funktioniert nicht mehr
Der Windows Explorer funktioniert nicht mehr
 Wie viel ist ein Bitcoin in RMB wert?
Wie viel ist ein Bitcoin in RMB wert?
 Welche Methoden gibt es, um eine Operatorüberladung in der Go-Sprache zu implementieren?
Welche Methoden gibt es, um eine Operatorüberladung in der Go-Sprache zu implementieren?
 Der Computer fordert zur Lösung des NSIS-Fehlers auf
Der Computer fordert zur Lösung des NSIS-Fehlers auf
 So verwenden Sie die jsreplace-Funktion
So verwenden Sie die jsreplace-Funktion
 Eingang zur offiziellen msdn-Website
Eingang zur offiziellen msdn-Website
 Der Zweck von memcpy in c
Der Zweck von memcpy in c
 So implementieren Sie einen Zeilenumbruch in der Warnung
So implementieren Sie einen Zeilenumbruch in der Warnung








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



