
 Technologie-Peripheriegeräte
KI
Der entscheidende Schritt zum „Einsteigen ins Auto' für große Modelle: Der weltweit erste Open-Source-Datensatz für Sprache und autonomes Fahren ist da
Technologie-Peripheriegeräte
KI
Der entscheidende Schritt zum „Einsteigen ins Auto' für große Modelle: Der weltweit erste Open-Source-Datensatz für Sprache und autonomes Fahren ist da
Der entscheidende Schritt zum „Einsteigen ins Auto' für große Modelle: Der weltweit erste Open-Source-Datensatz für Sprache und autonomes Fahren ist da

DriveLM ist ein sprachbasiertes Treiberprojekt, das einen Datensatz und ein Modell enthält. Mit DriveLM führen wir die Inferenzfähigkeiten großer Sprachmodelle im autonomen Fahren (AD) ein, um Entscheidungen zu treffen und eine erklärbare Planung sicherzustellen.
Im Datensatz von DriveLM verwenden wir von Menschen geschriebene Argumentationslogik als Verbindungen, um Wahrnehmung, Vorhersage und Planung zu erleichtern (P3). In unserem Modell schlagen wir ein visuelles AD-Sprachmodell mit Mindmapping-Funktionen vor, um bessere Planungsergebnisse zu erzielen. Derzeit haben wir eine Demoversion des Datensatzes veröffentlicht, und der vollständige Datensatz und das Modell werden in Zukunft veröffentlicht
Projektlink: https://github.com/OpenDriveLab/DriveLM Was neu geschrieben werden muss, ist: Projektlink: https://github.com/OpenDriveLab/DriveLM
Was ist Graph-of-Thoughts in AD?
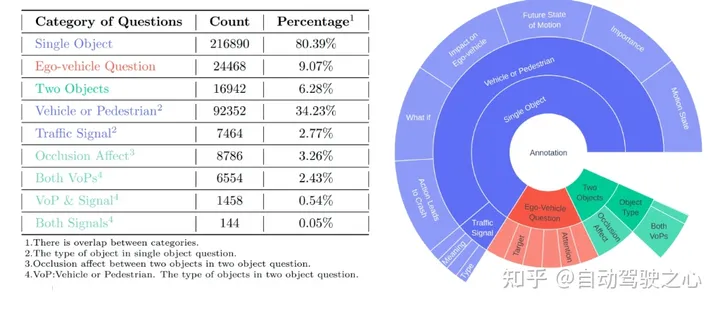
Der aufregendste Aspekt des Datensatzes ist: Die Frage-Antwort-Funktion (QA) in P3 ist in einer grafischen Struktur mit QA-Paaren als jedem Knoten und den Beziehungen von Objekten als Kanten verbunden.
Im Vergleich zu rein sprachlichen Denkbäumen oder Denkkarten bevorzugen wir Multimodalität. Im AD-Bereich tun wir dies, weil jede Stufe die AD-Aufgabe definiert, von der Rohsensoreingabe bis zur endgültigen Steuerungsaktion

Was ist im DriveLM-Datensatz enthalten?
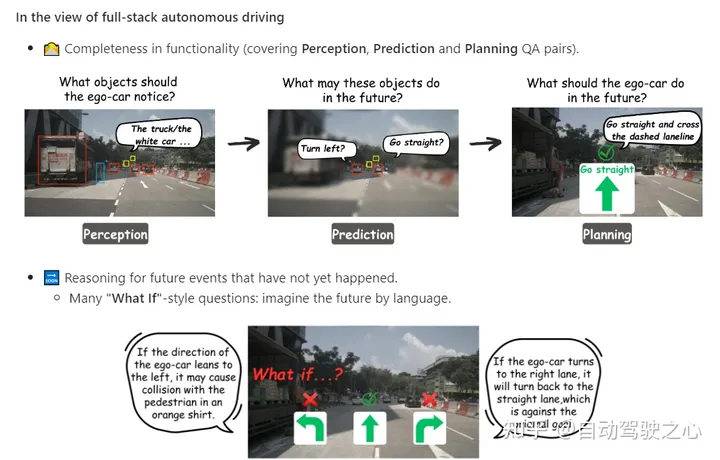
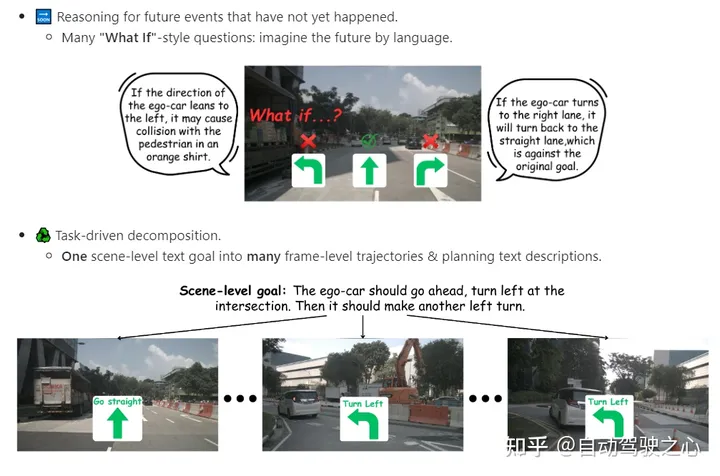
Erstellen Sie unseren Datensatz basierend auf dem gängigen nuScenes-Datensatz. Das Kernelement von DriveLM ist die rahmenbasierte P3-Qualitätssicherung. Wahrnehmungsprobleme erfordern, dass Modelle Objekte in einer Szene erkennen. Das Vorhersageproblem erfordert, dass das Modell den zukünftigen Zustand wichtiger Objekte in der Szene vorhersagt. Planungsprobleme veranlassen das Modell, sinnvolle Planungsmaßnahmen zu ergreifen und gefährliche Maßnahmen zu vermeiden.
Wie läuft der Kalibrierungsprozess ab?
- Keyframe-Auswahl. Ausgehend von allen Frames in einem Clip wählt der Annotator die Keyframes aus, die mit Anmerkungen versehen werden müssen. Der Standard besagt, dass diese Rahmenwerke Änderungen im Bewegungszustand des eigenen Fahrzeugs beinhalten sollten (Spurwechsel, plötzliches Anhalten, Anfahren nach dem Anhalten usw.).
- Schlüsselobjektauswahl. Bei einem gegebenen Keyframe muss der Annotator Schlüsselobjekte in sechs umgebenden Bildern erfassen. Der Standard besagt, dass diese Objekte das eigene Fahrzeug beeinflussen können (Ampeln, Fußgänger, die die Straße überqueren, andere Fahrzeuge)
- Q&A-Hinweise. Anhand dieser Schlüsselobjekte generieren wir automatisch Fragen zu einzelnen oder mehreren Objekten zu Wahrnehmung, Vorhersage und Planung. Weitere Details finden Sie in unseren Demodaten.
Das obige ist der detaillierte Inhalt vonDer entscheidende Schritt zum „Einsteigen ins Auto' für große Modelle: Der weltweit erste Open-Source-Datensatz für Sprache und autonomes Fahren ist da. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1375
1375
 52
52

 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI verändert tatsächlich die Mathematik. Vor kurzem hat Tao Zhexuan, der diesem Thema große Aufmerksamkeit gewidmet hat, die neueste Ausgabe des „Bulletin of the American Mathematical Society“ (Bulletin der American Mathematical Society) weitergeleitet. Zum Thema „Werden Maschinen die Mathematik verändern?“ äußerten viele Mathematiker ihre Meinung. Der gesamte Prozess war voller Funken, knallhart und aufregend. Der Autor verfügt über eine starke Besetzung, darunter der Fields-Medaillengewinner Akshay Venkatesh, der chinesische Mathematiker Zheng Lejun, der NYU-Informatiker Ernest Davis und viele andere bekannte Wissenschaftler der Branche. Die Welt der KI hat sich dramatisch verändert. Viele dieser Artikel wurden vor einem Jahr eingereicht.
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Stehen Sie vor einer Verzögerung oder einer langsamen mobilen Datenverbindung auf dem iPhone? Normalerweise hängt die Stärke des Mobilfunk-Internets auf Ihrem Telefon von mehreren Faktoren ab, wie z. B. der Region, dem Mobilfunknetztyp, dem Roaming-Typ usw. Es gibt einige Dinge, die Sie tun können, um eine schnellere und zuverlässigere Mobilfunk-Internetverbindung zu erhalten. Fix 1 – Neustart des iPhone erzwingen Manchmal werden durch einen erzwungenen Neustart Ihres Geräts viele Dinge zurückgesetzt, einschließlich der Mobilfunkverbindung. Schritt 1 – Drücken Sie einfach einmal die Lauter-Taste und lassen Sie sie los. Drücken Sie anschließend die Leiser-Taste und lassen Sie sie wieder los. Schritt 2 – Der nächste Teil des Prozesses besteht darin, die Taste auf der rechten Seite gedrückt zu halten. Lassen Sie das iPhone den Neustart abschließen. Aktivieren Sie Mobilfunkdaten und überprüfen Sie die Netzwerkgeschwindigkeit. Überprüfen Sie es erneut. Fix 2 – Datenmodus ändern 5G bietet zwar bessere Netzwerkgeschwindigkeiten, funktioniert jedoch besser, wenn das Signal schwächer ist
 Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Ich weine zu Tode. Die Daten im Internet reichen überhaupt nicht aus. Das Trainingsmodell sieht aus wie „Die Tribute von Panem“, und KI-Forscher auf der ganzen Welt machen sich Gedanken darüber, wie sie diese datenhungrigen Esser ernähren sollen. Dieses Problem tritt insbesondere bei multimodalen Aufgaben auf. Zu einer Zeit, als sie ratlos waren, nutzte ein Start-up-Team der Abteilung der Renmin-Universität von China sein eigenes neues Modell, um als erstes in China einen „modellgenerierten Datenfeed selbst“ in die Realität umzusetzen. Darüber hinaus handelt es sich um einen zweigleisigen Ansatz auf der Verständnisseite und der Generierungsseite. Beide Seiten können hochwertige, multimodale neue Daten generieren und Datenrückmeldungen an das Modell selbst liefern. Was ist ein Modell? Awaker 1.0, ein großes multimodales Modell, das gerade im Zhongguancun-Forum erschienen ist. Wer ist das Team? Sophon-Motor. Gegründet von Gao Yizhao, einem Doktoranden an der Hillhouse School of Artificial Intelligence der Renmin University.
 Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Kürzlich wurde die Militärwelt von der Nachricht überwältigt: US-Militärkampfflugzeuge können jetzt mithilfe von KI vollautomatische Luftkämpfe absolvieren. Ja, erst kürzlich wurde der KI-Kampfjet des US-Militärs zum ersten Mal der Öffentlichkeit zugänglich gemacht und sein Geheimnis gelüftet. Der vollständige Name dieses Jägers lautet „Variable Stability Simulator Test Aircraft“ (VISTA). Er wurde vom Minister der US-Luftwaffe persönlich geflogen, um einen Eins-gegen-eins-Luftkampf zu simulieren. Am 2. Mai startete US-Luftwaffenminister Frank Kendall mit einer X-62AVISTA auf der Edwards Air Force Base. Beachten Sie, dass während des einstündigen Fluges alle Flugaktionen autonom von der KI durchgeführt wurden! Kendall sagte: „In den letzten Jahrzehnten haben wir über das unbegrenzte Potenzial des autonomen Luft-Luft-Kampfes nachgedacht, aber es schien immer unerreichbar.“ Nun jedoch,
