
 Technologie-Peripheriegeräte
KI
Klettern, Springen und das Überqueren enger Lücken – Open-Source-Lernstrategien zur Verstärkung ermöglichen es Roboterhunden, Parkour zu machen
Technologie-Peripheriegeräte
KI
Klettern, Springen und das Überqueren enger Lücken – Open-Source-Lernstrategien zur Verstärkung ermöglichen es Roboterhunden, Parkour zu machen
Klettern, Springen und das Überqueren enger Lücken – Open-Source-Lernstrategien zur Verstärkung ermöglichen es Roboterhunden, Parkour zu machen

Parkour ist eine Extremsportart. Es ist eine große Herausforderung für Roboter, insbesondere für vierbeinige Roboterhunde, die in komplexen Umgebungen schnell verschiedene Hindernisse überwinden müssen. Einige Studien haben versucht, Referenztierdaten oder komplexe Belohnungen zu verwenden, aber diese Ansätze erzeugen Parkour-Fähigkeiten, die entweder vielfältig, aber blind sind, oder visionsbasiert, aber szenenspezifisch. Beim autonomen Parkour müssen Roboter jedoch visionsbasierte und vielfältige allgemeine Fähigkeiten erlernen, um verschiedene Szenarien wahrzunehmen und schnell zu reagieren.
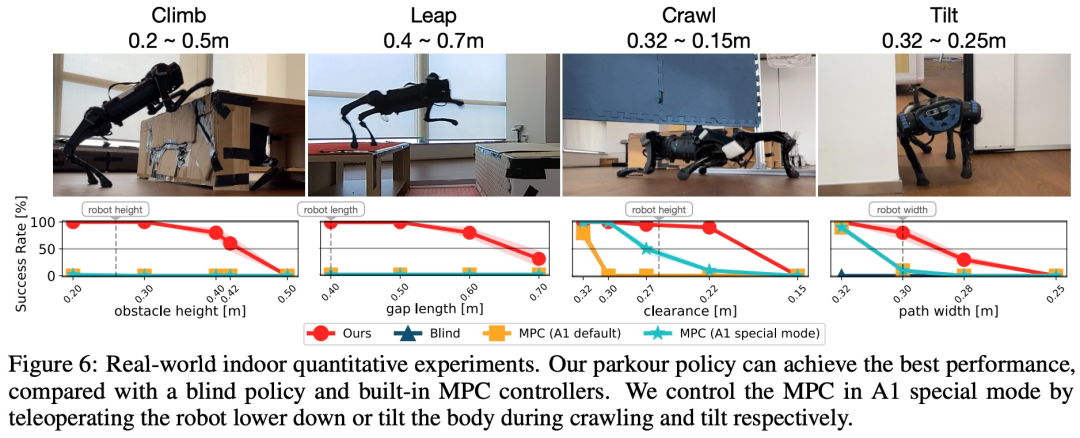
Kürzlich ging ein Video eines Roboterhunde-Parkours viral. Der Roboterhund im Video überwand in verschiedenen Szenarien schnell verschiedene Hindernisse. Wenn Sie beispielsweise durch die Lücke unter der Eisenplatte gehen, auf eine Holzkiste klettern und dann auf eine andere Holzkiste springen, sind eine Reihe von Bewegungen sanft und gleichmäßig:


Diese Bewegungsreihe zeigt dass der Roboterhund das Festhalten am Boden beherrscht: Krabbeln, Klettern und Springen. Außerdem verfügt er über eine besondere Fähigkeit: die Fähigkeit, sich schräg durch enge Lücken zu zwängen

 Wenn der Roboterhund scheitert, Hindernisse überwinden und es noch ein paar Versuche dauern wird:
Wenn der Roboterhund scheitert, Hindernisse überwinden und es noch ein paar Versuche dauern wird:
Dieser Inhalt wurde ins Chinesische umgeschrieben: Dieser Roboterhund basiert auf einem „Parkour“-Fähigkeitslernrahmen, der für kostengünstige Roboter entwickelt wurde. Das Rahmenwerk wurde gemeinsam von Forschern des Shanghai Qizhi Research Institute, der Stanford University, der ShanghaiTech University, der CMU und der Tsinghua University vorgeschlagen und sein Forschungspapier wurde für CoRL 2023 (mündlich) ausgewählt. Dieses Forschungsprojekt ist Open Source Methodeneinführung
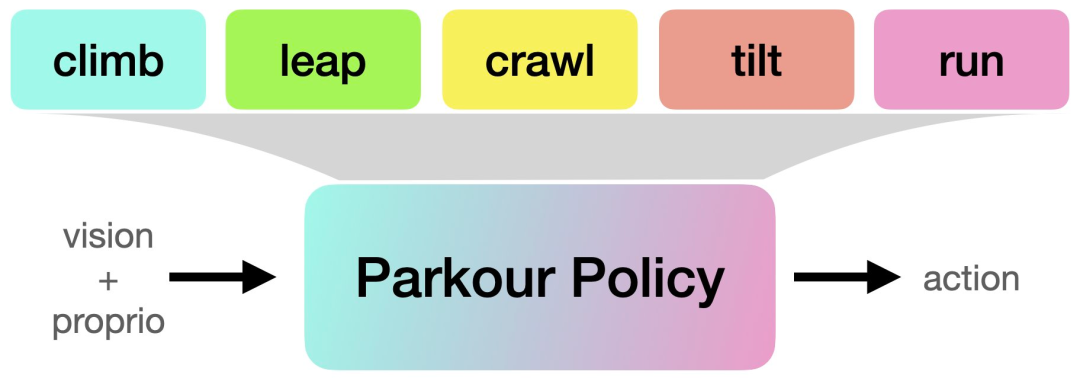
Konkret schlägt diese Forschung eine Methode des verstärkenden Lernens vor, die es Robotern ermöglichen soll, Fähigkeiten wie das Klettern auf hohe Hindernisse, das Springen über große Lücken, das Kriechen unter niedrigen Hindernissen, das Durchzwängen durch kleine Lücken und das Laufen zu erlernen und diese Fähigkeiten in Parkour zu übersetzen Strategien, die auf einer einzigen Vision basieren. Gleichzeitig werden diese Fähigkeiten mithilfe einer egozentrischen Tiefenkamera auf vierbeinige Roboter übertragen

Um die in dieser Studie vorgeschlagene Parkour-Strategie erfolgreich auf einem kostengünstigen Roboter einzusetzen, verwenden Sie einfach Onboard-Computing (Nvidia Jetson) und eine luftgestützte Tiefenkamera (Intel). Realsense) und Bordstromversorgung, ohne dass Bewegungserfassung, Lidar, mehrere Tiefenkameras und viele Berechnungen erforderlich sind
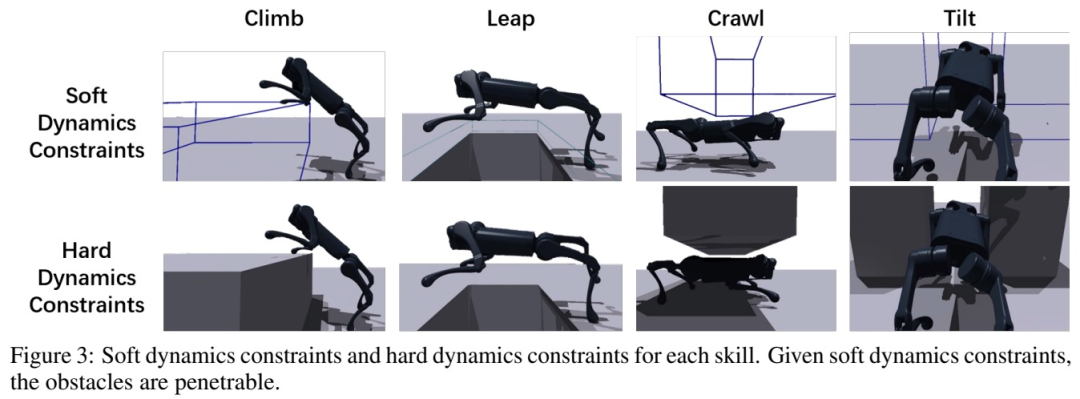
Um die Parkour-Strategie zu trainieren, führte die Studie die folgenden drei Phasen durch: Erste Stufe: Verstärkungslernen vor dem Training mit weichen dynamischen Einschränkungen. Diese Forschung verwendet automatische Kurse, damit der Roboter lernen kann, Hindernisse zu überwinden, und ermutigt den Roboter, schrittweise zu lernen, Hindernisse zu überwinden. 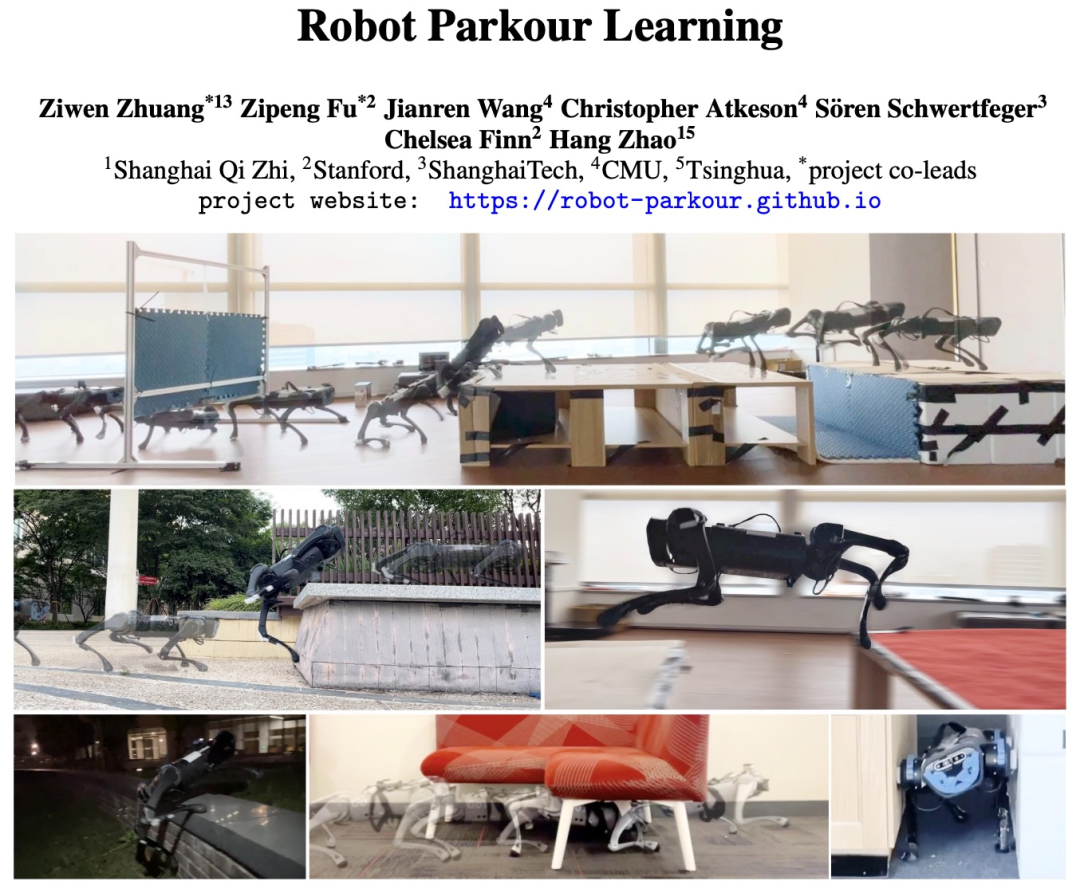
Die zweite Stufe: Feinabstimmung des Verstärkungslernens mit harten dynamischen Einschränkungen. Die Studie erzwingt in dieser Phase alle dynamischen Einschränkungen und nutzt realistische Dynamiken, um das in der Vortrainingsphase erlernte Verhalten des Roboters zu verfeinern.
Die dritte Stufe: Destillation. Nach dem Erlernen jeder einzelnen Parkour-Fähigkeit verwendet die Studie Dagger, um sie in eine visionsbasierte Parkour-Richtlinie (parametrisiert durch ein RNN) zu destillieren, die auf einem Beinroboter eingesetzt werden kann, der nur die Wahrnehmung und Berechnung an Bord nutzt.
Experimente und Ergebnisse
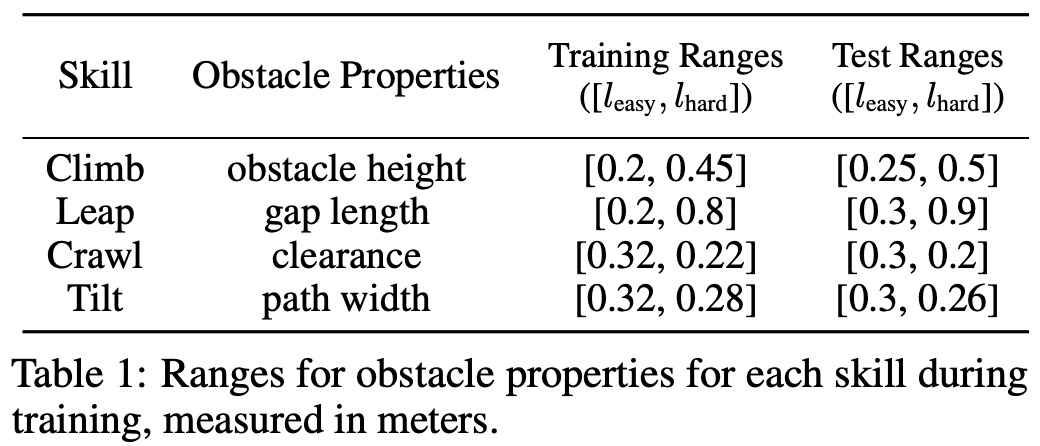
Im Training wurden in der Studie entsprechende Hindernisgrößen für jede Fertigkeit festgelegt, wie in Tabelle 1 unten gezeigt:
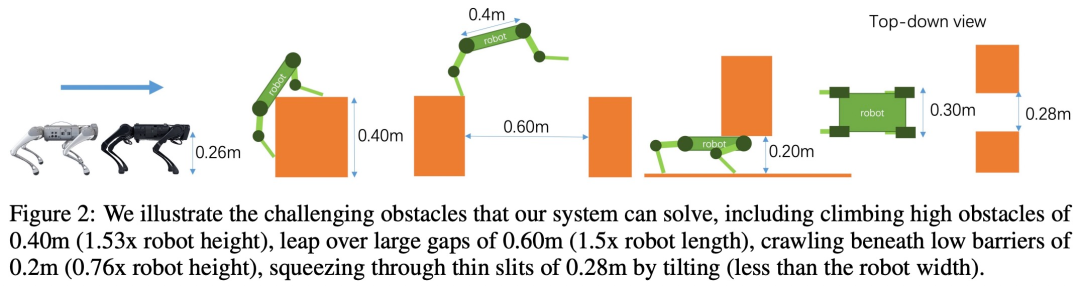
Die Studie umfasst umfangreiche und reale Simulationen -Life-Experimente wurden durchgeführt und die Ergebnisse zeigen, dass Parkour-Strategien es kostengünstigen Vierbeinerrobotern ermöglichen, autonom geeignete Parkour-Fähigkeiten auszuwählen und auszuführen, um sie nur mithilfe von Onboard-Computing, Onboard-Visual-Sensing und Onboard-Power durch anspruchsvolle Umgebungen in der offenen Welt zu durchqueren Erklimmen von Hindernissen bis zu 0,40 m (1,53-fache Roboterhöhe), Springen über große Lücken bis zu 0,60 m (1,5-fache Roboterlänge) und Springen über Hindernisse von nur 0,2 m (0,76-fache Roboterhöhe). Er kann unter Gegenständen kriechen und sich zusammendrücken durch eine schmale Lücke von 0,28 m (weniger als die Breite des Roboters) durch Kippen und kann weiter vorwärts rennen.
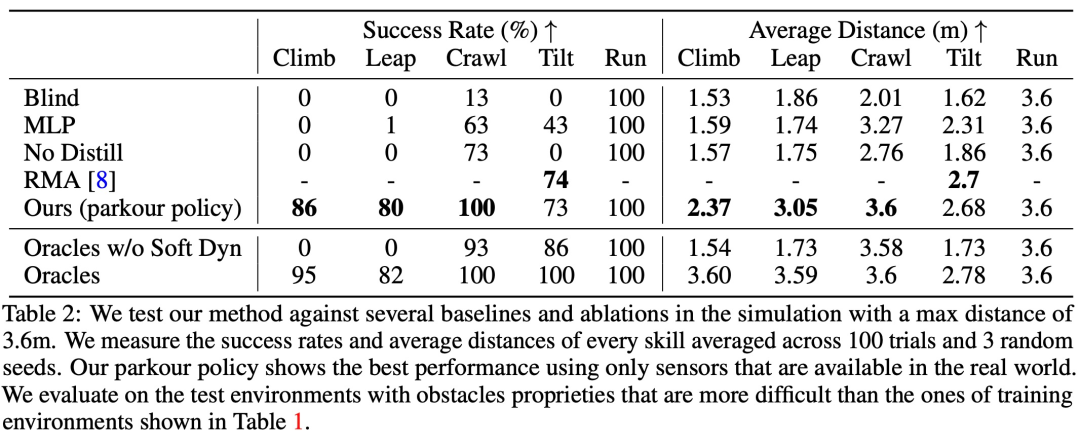
Darüber hinaus verglich die Studie die vorgeschlagene Methode auch mit mehreren Basismethoden und führte Ablationsexperimente in einer simulierten Umgebung durch. Die konkreten Ergebnisse sind in Tabelle 2 dargestellt:
Interessierte Leser können das Originalpapier lesen, um mehr über den Forschungsinhalt zu erfahren
Das obige ist der detaillierte Inhalt vonKlettern, Springen und das Überqueren enger Lücken – Open-Source-Lernstrategien zur Verstärkung ermöglichen es Roboterhunden, Parkour zu machen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1393
1393
 52
1205
24
52
1205
24

 Web3 Trading Platform Ranking_Web3 Globale Top Ten Summary Top Ten Summary
Apr 21, 2025 am 10:45 AM
Web3 Trading Platform Ranking_Web3 Globale Top Ten Summary Top Ten Summary
Apr 21, 2025 am 10:45 AM
Binance ist der Overlord des Global Digital Asset Trading -Ökosystems, und seine Merkmale umfassen: 1. Das durchschnittliche tägliche Handelsvolumen übersteigt 150 Milliarden US -Dollar, unterstützt 500 Handelspaare, die 98% der Mainstream -Währungen abdecken. 2. Die Innovationsmatrix deckt den Markt für Derivate, das Web3 -Layout und den Bildungssystem ab; 3. Die technischen Vorteile sind Millisekunden -Matching -Engines mit Spitzenvolumina von 1,4 Millionen Transaktionen pro Sekunde. 4. Compliance Progress hält 15 Länderlizenzen und legt konforme Einheiten in Europa und den Vereinigten Staaten ein.
 Wie man Verluste nach dem ETH -Upgrade vermeidet
Apr 21, 2025 am 10:03 AM
Wie man Verluste nach dem ETH -Upgrade vermeidet
Apr 21, 2025 am 10:03 AM
Nach dem ETH -Upgrade sollten Anfänger die folgenden Strategien anwenden, um Verluste zu vermeiden: 1. Machen Sie ihre Hausaufgaben und verstehen Sie das Grundwissen und aktualisieren Sie Inhalte von ETH; 2. Kontrollpositionen, testen Sie die Gewässer in kleinen Mengen und diversifizieren Investitionen; 3. Machen Sie einen Handelsplan, klären Sie die Ziele und setzen Sie Stop -Loss -Punkte. 4. Profile rational und vermeiden emotionale Entscheidungen; 5. Wählen Sie eine formelle und zuverlässige Handelsplattform; 6. Betrachten Sie die langfristige Beteiligung, um die Auswirkungen kurzfristiger Schwankungen zu vermeiden.
 Top 10 Cryptocurrency Exchange -Plattformen Die weltweit größte Liste der digitalen Währung
Apr 21, 2025 pm 07:15 PM
Top 10 Cryptocurrency Exchange -Plattformen Die weltweit größte Liste der digitalen Währung
Apr 21, 2025 pm 07:15 PM
Börsen spielen eine wichtige Rolle auf dem heutigen Kryptowährungsmarkt. Sie sind nicht nur Plattformen, an denen Investoren handeln, sondern auch wichtige Quellen für Marktliquidität und Preisentdeckung. Der weltweit größte virtuelle Währungsbörsen gehören zu den Top Ten, und diese Börsen sind nicht nur im Handelsvolumen weit voraus, sondern haben auch ihre eigenen Vorteile in Bezug auf Benutzererfahrung, Sicherheit und innovative Dienste. Börsen, die über die Liste stehen, haben normalerweise eine große Benutzerbasis und einen umfangreichen Markteinfluss, und deren Handelsvolumen und Vermögenstypen sind häufig mit anderen Börsen schwer zu erreichen.
 Warum ist der Anstieg oder Abfall der virtuellen Währungspreise? Warum ist der Anstieg oder Abfall der virtuellen Währungspreise?
Apr 21, 2025 am 08:57 AM
Warum ist der Anstieg oder Abfall der virtuellen Währungspreise? Warum ist der Anstieg oder Abfall der virtuellen Währungspreise?
Apr 21, 2025 am 08:57 AM
Faktoren der steigenden Preise für virtuelle Währung sind: 1. Erhöhte Marktnachfrage, 2. Verringertes Angebot, 3.. Rückgangsfaktoren umfassen: 1. Verringerte Marktnachfrage, 2. Erhöhtes Angebot, 3. Streik der negativen Nachrichten, 4. Pessimistische Marktstimmung, 5. makroökonomisches Umfeld.
 Was sind die zehn besten Plattformen im Währungsaustauschkreis?
Apr 21, 2025 pm 12:21 PM
Was sind die zehn besten Plattformen im Währungsaustauschkreis?
Apr 21, 2025 pm 12:21 PM
Zu den Top -Börsen gehören: 1. Binance, das weltweit größte Handelsvolumen, unterstützt 600 Währungen und die Spot -Handhabungsgebühr beträgt 0,1%. 2. OKX, eine ausgewogene Plattform, unterstützt 708 Handelspaare, und die dauerhafte Vertragsabwicklungsgebühr beträgt 0,05%. 3. Gate.io deckt 2700 kleine Währungen ab, und die Gebühr für die Spot-Handhabung beträgt 0,1%-0,3%; 4. Coinbase, der US -Konformitäts -Benchmark, die Spot -Handhabungsgebühr beträgt 0,5%; 5. Kraken, die Top -Sicherheit und regelmäßige Reserveprüfung.
 Rangliste der Hebelbörsen im Währungskreis Die neuesten Empfehlungen der zehn meistgezogenen Börsen im Währungskreis
Apr 21, 2025 pm 11:24 PM
Rangliste der Hebelbörsen im Währungskreis Die neuesten Empfehlungen der zehn meistgezogenen Börsen im Währungskreis
Apr 21, 2025 pm 11:24 PM
Die Plattformen, die im Jahr 2025 im Leveraged Trading, Security und Benutzererfahrung hervorragende Leistung haben, sind: 1. OKX, geeignet für Hochfrequenzhändler und bieten bis zu 100-fache Hebelwirkung; 2. Binance, geeignet für Mehrwährungshändler auf der ganzen Welt und bietet 125-mal hohe Hebelwirkung; 3. Gate.io, geeignet für professionelle Derivate Spieler, die 100 -fache Hebelwirkung bietet; 4. Bitget, geeignet für Anfänger und Sozialhändler, die bis zu 100 -fache Hebelwirkung bieten; 5. Kraken, geeignet für stetige Anleger, die fünfmal Hebelwirkung liefert; 6. Bybit, geeignet für Altcoin -Entdecker, die 20 -fache Hebelwirkung bietet; 7. Kucoin, geeignet für kostengünstige Händler, die 10-fache Hebelwirkung bietet; 8. Bitfinex, geeignet für das Seniorenspiel
 Was bedeutet Cross-Chain-Transaktion? Was sind die Cross-Chain-Transaktionen?
Apr 21, 2025 pm 11:39 PM
Was bedeutet Cross-Chain-Transaktion? Was sind die Cross-Chain-Transaktionen?
Apr 21, 2025 pm 11:39 PM
Börsen, die Cross-Chain-Transaktionen unterstützen: 1. Binance, 2. Uniswap, 3. Sushiswap, 4. Kurvenfinanzierung, 5. Thorchain, 6. 1inch Exchange, 7. DLN-Handel, diese Plattformen unterstützen Multi-Chain-Asset-Transaktionen durch verschiedene Technologien.
 Worldcoin (WLD) Preisprognose 2025-2031: Wird WLD bis 2031 $ erreichen?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD) Preisprognose 2025-2031: Wird WLD bis 2031 $ erreichen?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD) fällt auf dem Kryptowährungsmarkt mit seinen einzigartigen biometrischen Überprüfungs- und Datenschutzschutzmechanismen auf, die die Aufmerksamkeit vieler Investoren auf sich ziehen. WLD hat mit seinen innovativen Technologien, insbesondere in Kombination mit OpenAI -Technologie für künstliche Intelligenz, außerdem unter Altcoins gespielt. Aber wie werden sich die digitalen Vermögenswerte in den nächsten Jahren verhalten? Lassen Sie uns den zukünftigen Preis von WLD zusammen vorhersagen. Die Preisprognose von 2025 WLD wird voraussichtlich im Jahr 2025 ein signifikantes Wachstum in WLD erzielen. Die Marktanalyse zeigt, dass der durchschnittliche WLD -Preis 1,31 USD mit maximal 1,36 USD erreichen kann. In einem Bärenmarkt kann der Preis jedoch auf rund 0,55 US -Dollar fallen. Diese Wachstumserwartung ist hauptsächlich auf Worldcoin2 zurückzuführen.
