

Es versteht sich, dass W1 auf der Grundlage der „Motion Intelligence“ von Zhuji Dynamics entwickelt wurde. Es kombiniert Bein- und Radstrukturen, ist mit selbst entwickelten Hochleistungsgelenken ausgestattet, verfügt über Echtzeit-Geländeerkennung und Geländemobilitätsfähigkeiten ist effizienter als Roboter mit einfachen Beinen sind effizienter und ihre anwendbaren Szenarien sind umfangreicher und komplexer.
Konkret hat W1 die Eignungsüberprüfung in mehreren komplexen Anwendungsszenarien erfolgreich bestanden:
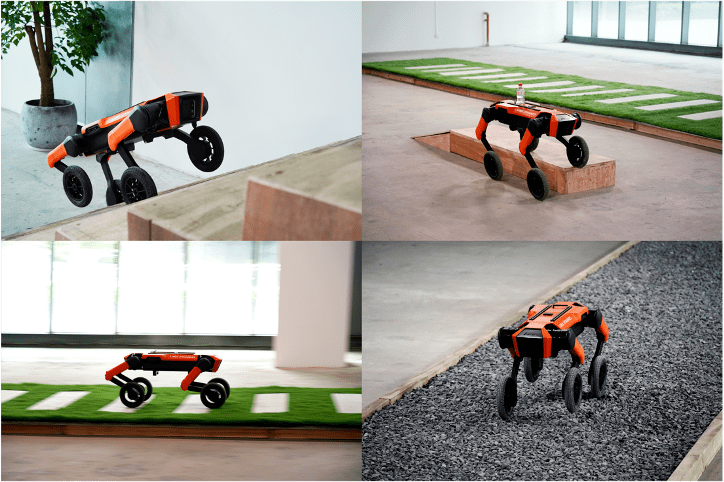
Treppenauf- und -abstieg: Die in die Wahrnehmung integrierte Bewegungssteuerung ermöglicht ein stabiles Auf- und Absteigen von Treppen auf Rädern
Steigungen bergauf und bergab: Der Körper kann auf gleicher Höhe mit der Hangoberfläche und dem Boden gehalten werden und kann je nach Bedarf flexibel gewechselt werden
Malu Yazi: Kann flexibel zwischen Bewegungsgangarten wechseln und die Herausforderungen verschiedener diskreter Terrains problemlos meistern
Traversieren am Boden: Bei Hochgeschwindigkeitsbewegungen können Sie Ihre Körpergröße frei anpassen, um sie an die Bedürfnisse unterschiedlicher Arbeitsumgebungen anzupassen
Grassteinstraße: Wenn das Fahrzeug auf einer holprigen Straße fährt, reagieren die zahlreichen Gelenke der Beine schnell und kooperativ, um die Haltungsschwankungen des Körpers zu reduzieren
......
Zhang Wei, Gründer von Zhuji Dynamics, sagte, dass ein vierrädriger Roboter fast alle Fähigkeiten eines vierbeinigen Roboters haben muss, aber die Herausforderungen der sensorischen Interferenz, der Zustandsschätzung und der Bewegungssteuerung, die durch die Mischung aus Rädern und Füßen entstehen, schon vorhanden sind um ein Vielfaches erhöht, was es äußerst schwierig macht, und es gibt keine ausgereifte Lösung auf dem Markt.
Daher entschied sich Zhuji Dynamics für eine selbst entwickelte Lösung, um Wahrnehmungsfähigkeiten mit Bewegungssteuerung zu kombinieren und dabei akademische und Forschungs- und Entwicklungserfahrung in den Bereichen Geländewahrnehmung, Reinforcement Learning, Multi-Rigid-Body-Dynamik, Hybriddynamik, modellprädiktive Steuerung und anderen Bereichen zu nutzen, um eine führende Wahrnehmung zu etablieren Das in die Steuerung integrierte Algorithmus-Framework erreicht eine höhere Stabilität und stärkere Echtzeit-Steuerungsfähigkeiten.
Zhang Wei glaubt, dass sich Allzweckroboter mit Füßen derzeit in einer technologischen Explosionsphase befinden und die Schnittstelle zwischen Grundlagenforschung und Kommerzialisierung entstanden ist und sich weiter ausdehnt. Das Ziel von Zhuji Dynamics ist es, ein effizientes Universal-Chassis mit Geländegängigkeit zu entwickeln, und W1 ist ihr erstes Produkt
Zukünftig wird Zhuji Dynamics durch Technologieforschung, -entwicklung und -innovation weitere Probleme bei der Implementierung von Robotern mit Füßen lösen, den Einstieg von Robotern auf Füßen in den industriellen Bereich fördern und Werte schaffen
Das obige ist der detaillierte Inhalt vonZhuji Dynamics bringt den ersten vierrädrigen Roboter W1 mit „Universal-Chassis' auf den Markt. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

















![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



