
 Technologie-Peripheriegeräte
KI
SupFusion: Erforschen Sie, wie Lidar-Kamera-fusionierte 3D-Erkennungsnetzwerke effektiv überwacht werden können?
Technologie-Peripheriegeräte
KI
SupFusion: Erforschen Sie, wie Lidar-Kamera-fusionierte 3D-Erkennungsnetzwerke effektiv überwacht werden können?
SupFusion: Erforschen Sie, wie Lidar-Kamera-fusionierte 3D-Erkennungsnetzwerke effektiv überwacht werden können?

Die 3D-Erkennung auf Basis der Lidar-Kamerafusion ist eine Schlüsselaufgabe für das autonome Fahren. In den letzten Jahren sind viele LiDAR-Kamera-Fusionsmethoden entstanden und haben eine gute Leistung erzielt, diesen Methoden fehlt jedoch immer ein gut konzipierter und effektiv überwachter Fusionsprozess.
In diesem Artikel wird eine neue Trainingsstrategie namens SupFusion vorgestellt, die eine Laser-Radar-Kamera-Fusion bereitstellt zusätzliche Überwachung auf Funktionsebene und verbessert die Erkennungsleistung erheblich. Die Methode umfasst die Datenerweiterungsmethode Polar Sampling zur Verschlüsselung spärlicher Ziele und zum Training von Hilfsmodellen, um hochwertige Merkmale für die Überwachung zu generieren. Diese Funktionen werden verwendet, um das Lidar-Kamera-Fusionsmodell zu trainieren und die fusionierten Features zu optimieren, um die Generierung hochwertiger Features zu simulieren. Darüber hinaus wird ein einfaches, aber effektives Deep-Fusion-Modul vorgeschlagen, das im Vergleich zu bisherigen Fusionsmethoden mit der SupFusion-Strategie kontinuierlich eine überlegene Leistung erzielt. Die Methode in diesem Artikel hat die folgenden Vorteile: Erstens führt SupFusion eine zusätzliche Überwachung auf Funktionsebene ein, die die Erkennungsleistung von Lidar-Kameras verbessern kann, ohne zusätzliche Inferenzkosten zu erhöhen. Zweitens kann die vorgeschlagene Tiefenfusion die Fähigkeiten des Detektors kontinuierlich verbessern. Die vorgeschlagenen SupFusion- und Deep-Fusion-Module sind Plug-and-Play-Module und dieser Artikel demonstriert ihre Wirksamkeit durch umfangreiche Experimente. Im KITTI-Benchmark für die 3D-Erkennung auf Basis mehrerer Lidar-Kameras wurde eine 3D-mAP-Verbesserung von ca. 2 % erreicht!
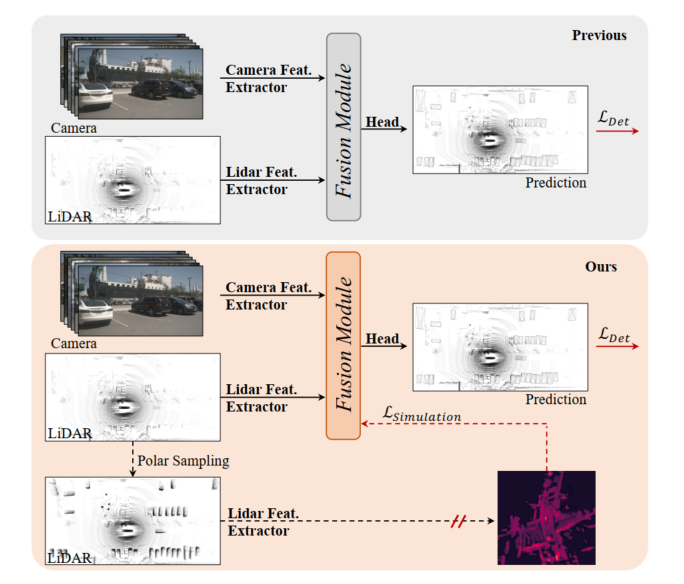
Abbildung 1: Oben, vorheriges 3D-Erkennungsmodell der Lidar-Kamera, das Fusionsmodul ist durch Erkennungsverlust optimiert. Unten: Das in diesem Artikel vorgeschlagene SupFusion führt eine Hilfsüberwachung durch hochwertige Funktionen ein, die von Hilfsmodellen bereitgestellt werden.
Die auf Lidar-Kamerafusion basierende 3D-Erkennung ist eine kritische und herausfordernde Aufgabe beim autonomen Fahren und in der Robotik. Bisherige Methoden projizieren die Kameraeingabe immer über intrinsische und extrinsische Parameter auf das Lidar-BEV oder den Voxelraum, um Lidar- und Kamerafunktionen auszurichten. Anschließend wird eine einfache Verkettung oder Summierung eingesetzt, um die zusammengeführten Merkmale für die endgültige Erkennung zu erhalten. Darüber hinaus haben einige auf Deep Learning basierende Fusionsmethoden vielversprechende Leistungen erbracht. Bisherige Fusionsmethoden optimieren jedoch immer direkt die 3D/2D-Merkmalsextraktions- und Fusionsmodule durch Erkennungsverluste, denen es an sorgfältigem Design und effektiver Überwachung auf Merkmalsebene mangelt, was ihre Leistung einschränkt.
In den letzten Jahren haben Destillationsmethoden große Verbesserungen bei der Überwachung auf Funktionsebene für die 3D-Erkennung gezeigt. Einige Methoden bieten LIDAR-Funktionen, um das 2D-Backbone bei der Schätzung von Tiefeninformationen basierend auf der Kameraeingabe zu unterstützen. Darüber hinaus bieten einige Methoden Lidar-Kamerafusionsfunktionen zur Überwachung des Lidar-Backbones, um globale und kontextbezogene Darstellungen aus Lidar-Eingaben zu lernen. Durch die Einführung einer Hilfsüberwachung auf Merkmalsebene durch die Simulation robusterer und qualitativ hochwertigerer Merkmale kann der Detektor geringfügige Verbesserungen bewirken. Davon inspiriert besteht die natürliche Lösung für die Funktionsfusion von Lidar-Kameras darin, stärkere, qualitativ hochwertige Funktionen bereitzustellen und eine zusätzliche Überwachung für die 3D-Erkennung von Lidar-Kameras einzuführen!
Um die Leistung der fusionierten 3D-Erkennung auf Basis von Lidar-Kameras zu verbessern, wird in diesem Artikel eine überwachte Lidar-Kamera-Fusion-Methode namens SupFusion vorgeschlagen. Diese Methode erreicht dies durch die Generierung hochwertiger Merkmale und eine effektive Überwachung der Fusions- und Merkmalsextraktionsprozesse. Zunächst trainieren wir ein Hilfsmodell, um hochwertige Funktionen bereitzustellen. Im Gegensatz zu früheren Methoden, die größere Modelle oder zusätzliche Daten nutzen, schlagen wir eine neue Methode zur Datenerweiterung namens Polar Sampling vor. Polar Sampling erhöht dynamisch die Dichte von Zielen aus spärlichen LIDAR-Daten, wodurch sie leichter zu erkennen sind und die Merkmalsqualität, wie z. B. genaue Erkennungsergebnisse, verbessert wird. Anschließend trainieren wir einfach einen Detektor auf Basis der Lidar-Kamerafusion und führen eine zusätzliche Überwachung auf Funktionsebene ein. In diesem Schritt speisen wir die rohen Lidar- und Kameraeingaben in das 3D/2D-Backbone- und Fusionsmodul ein, um fusionierte Features zu erhalten. Die fusionierten Merkmale werden zur endgültigen Vorhersage in den Erkennungskopf eingespeist, während die Hilfsüberwachung die fusionierten Merkmale in qualitativ hochwertige Merkmale modelliert. Diese Funktionen werden durch vorab trainierte Hilfsmodelle und erweiterte LIDAR-Daten erhalten. Auf diese Weise kann die vorgeschlagene Überwachung auf Merkmalsebene es dem Fusionsmodul ermöglichen, robustere Merkmale zu generieren und die Erkennungsleistung weiter zu verbessern. Um die Funktionen von Lidar und Kamera besser zu verschmelzen, schlagen wir ein einfaches und effektives Deep-Fusion-Modul vor, das aus gestapelten MLP-Blöcken und dynamischen Fusionsblöcken besteht. SupFusion kann die Fähigkeiten des Deep-Fusion-Moduls voll ausschöpfen und die Erkennungsgenauigkeit kontinuierlich verbessern!
Hauptbeiträge dieses Artikels:
- Schlägt eine neue überwachte Fusionstrainingsstrategie SupFusion vor, die hauptsächlich aus einem Prozess zur Generierung hochwertiger Merkmale besteht, und schlägt erstmals einen zusätzlichen überwachten Verlust auf Merkmalsebene für eine robuste Extraktion von Fusionsmerkmalen und eine genaue 3D-Erkennung vor.
- Um qualitativ hochwertige Funktionen in SupFusion zu erhalten, wird eine Datenerweiterungsmethode namens „Polar Sampling“ vorgeschlagen, um spärliche Ziele zu verschlüsseln. Darüber hinaus wird ein effektives Tiefenfusionsmodul vorgeschlagen, um die Erkennungsgenauigkeit kontinuierlich zu verbessern.
- Führte umfangreiche Experimente auf der Grundlage mehrerer Detektoren mit unterschiedlichen Fusionsstrategien durch und erzielte eine mAP-Verbesserung von etwa 2 % gegenüber dem KITTI-Benchmark.
Die vorgeschlagene Methode
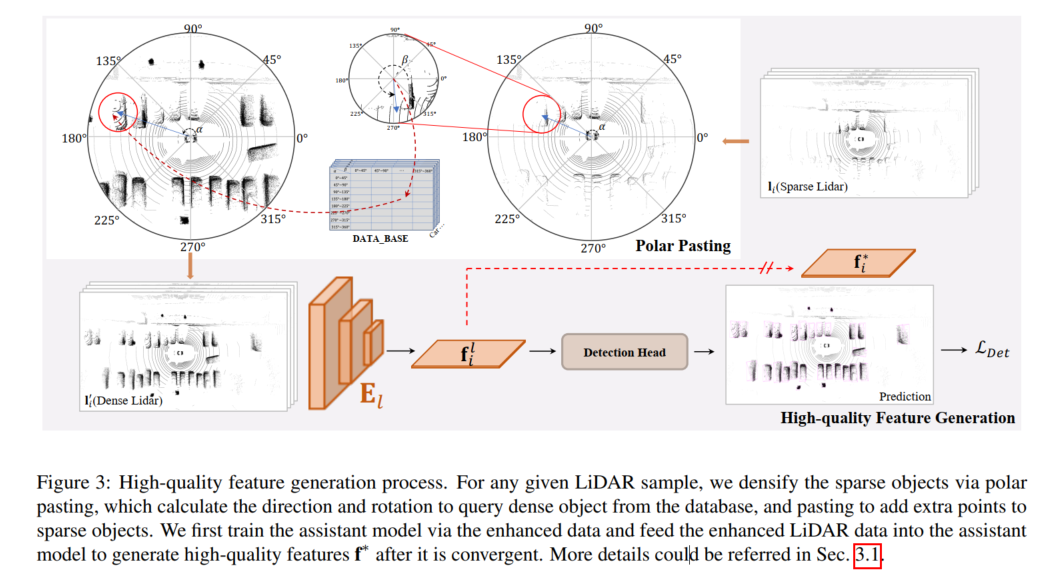
Der Prozess zur Generierung hochwertiger Merkmale ist in der folgenden Abbildung dargestellt. Für jedes gegebene LiDAR-Beispiel wird das spärliche Ziel durch polares Einfügen verschlüsselt und das polare Einfügen berechnet die zu extrahierende Ausrichtung und Drehung Fragen Sie dichte Ziele aus der Datenbank ab und fügen Sie durch Einfügen zusätzliche Punkte für spärliche Ziele hinzu. In diesem Artikel wird zunächst das Hilfsmodell mit erweiterten Daten trainiert und die erweiterten LIDAR-Daten in das Hilfsmodell eingespeist, um nach seiner Konvergenz hochwertige Merkmale f* zu generieren.
Hochwertige Feature-Generierung
Um eine Überwachung auf Feature-Ebene in SupFusion bereitzustellen, wird ein Hilfsmodell übernommen, um hochwertige Features aus den erweiterten Daten zu erfassen, wie in Abbildung 3 dargestellt. Zunächst wird ein Hilfsmodell trainiert, um qualitativ hochwertige Funktionen bereitzustellen. Für jede Probe in D werden die spärlichen LIDAR-Daten durch Polarpaste erweitert, um verbesserte Daten zu erhalten. Dabei wird das alternative Ziel durch Hinzufügen der in der Polargruppierung generierten Punktmenge verschlüsselt. Nachdem das Hilfsmodell konvergiert ist, werden die verbesserten Proben dann in das optimierte Hilfsmodell eingegeben, um hochwertige Merkmale für das Training des 3D-Erkennungsmodells der Lidar-Kamera zu erfassen. Um eine bessere Anwendung auf einen bestimmten Lidar-Kameradetektor zu ermöglichen und die Implementierung zu vereinfachen, übernehmen wir hier einfach den Lidar-Zweigdetektor als Hilfsmodell!
Detektortraining
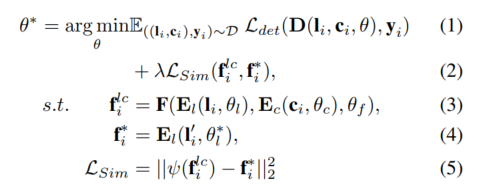
Für jeden gegebenen Lidar-Kameradetektor wird das Modell mithilfe der vorgeschlagenen Hilfsüberwachung auf Funktionsebene trainiert. Anhand einer Probe , werden das Lidar und die Kamera zunächst in die 3D- und 2D-Encoder eingegeben, um die entsprechenden Merkmale zu erfassen. Diese Merkmale werden in das Fusionsmodell eingegeben, um die fusionierten Merkmale zu generieren und zur Erkennung zu fließen. Machen Sie die endgültige Vorhersage in Dein Kopf. Darüber hinaus wird die vorgeschlagene Hilfsüberwachung eingesetzt, um fusionierte Features mit hochwertigen Features zu simulieren, die aus dem vorab trainierten Hilfsmodell und erweiterten LiDAR-Daten generiert werden. Der obige Prozess kann wie folgt formuliert werden:
Polar Sampling
Um qualitativ hochwertige Funktionen bereitzustellen, stellt dieser Artikel eine neue Datenverbesserungsmethode namens Polar Sampling in der vorgeschlagenen SupFusion vor, um das spärliche Problem This zu lösen Das Problem führt häufig zu Erkennungsfehlern. Zu diesem Zweck führen wir eine dichte Verarbeitung dünner Ziele in LIDAR-Daten durch, ähnlich wie bei der Verarbeitung dichter Ziele. Die Erfassung von Polarkoordinaten besteht aus zwei Teilen: der Gruppierung von Polarkoordinaten und dem Einfügen von Polarkoordinaten. Bei der Gruppierung von Polarkoordinaten erstellen wir hauptsächlich eine Datenbank zum Speichern dichter Ziele, die zum Einfügen von Polarkoordinaten verwendet wird, sodass spärliche Ziele dichter werden.
Unter Berücksichtigung der Eigenschaften des Lidar-Sensors sind die gesammelten Punktwolkendaten natürlich spezifisch Dichteverteilung. Beispielsweise hat ein Objekt mehr Punkte auf seiner dem Lidar-Sensor zugewandten Oberfläche und weniger Punkte auf den gegenüberliegenden Seiten. Die Dichteverteilung wird hauptsächlich durch Orientierung und Drehung beeinflusst, während die Dichte der Punkte hauptsächlich von der Entfernung abhängt. Objekte, die näher am Lidar-Sensor liegen, weisen eine dichtere Punktdichte auf. Davon inspiriert besteht das Ziel dieser Arbeit darin, spärliche Ziele in großer Entfernung und dichte Ziele in kurzer Entfernung entsprechend der Richtung und Drehung der spärlichen Ziele zu verdichten, um die Dichteverteilung aufrechtzuerhalten. Wir erstellen ein Polarkoordinatensystem für die gesamte Szene und das Ziel basierend auf der Mitte der Szene und dem spezifischen Ziel und definieren die positive Richtung des Lidar-Sensors als 0 Grad, um die entsprechende Richtung und Drehung zu messen. Anschließend sammeln wir Ziele mit ähnlichen Dichteverteilungen (z. B. mit ähnlicher Ausrichtung und Rotation) und generieren für jede Gruppe ein dichtes Ziel in polaren Gruppierungen und verwenden dieses in polarer Paste, um spärliche Ziele zu verdichten
Polare Gruppierung
Wie in Abbildung 4 dargestellt Hier wird eine Datenbank B erstellt, um den generierten dichten Objektpunktsatz l entsprechend der Richtung und Drehung in der Polargruppierung zu speichern, die in Abbildung 4 als α und β aufgezeichnet sind!
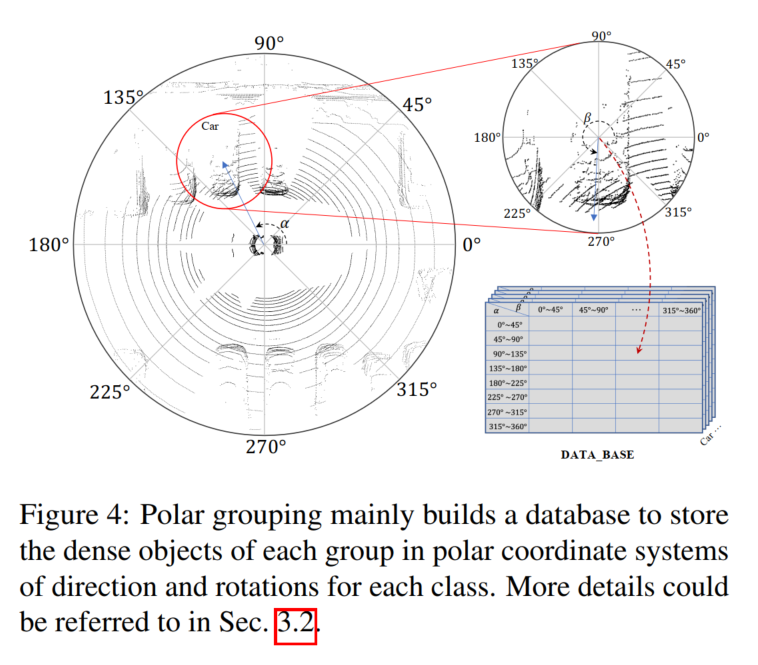
Durchsuchen Sie zunächst den gesamten Datensatz, berechnen Sie den Polarwinkel aller Ziele nach Position und stellen Sie die Drehung im Benchmark bereit. Zweitens teilen Sie die Ziele anhand ihrer Polarwinkel in Gruppen ein. Teilen Sie die Ausrichtung und Drehung manuell in N Gruppen ein, und für jeden Zielpunktsatz l können Sie ihn entsprechend dem Index in die entsprechende Gruppe einordnen:

Polar Pasting
Wie in Abbildung 2 dargestellt, wird Polar Pasting verwendet, um spärliche LIDAR-Daten zu verbessern, um Hilfsmodelle zu trainieren und hochwertige Features zu generieren. Wenn eine LiDAR-Stichprobe ,,,, Ziele enthält, kann für jedes Ziel die gleiche Ausrichtung und Drehung wie beim Gruppierungsprozess berechnet werden, und die dichten Ziele werden von B gemäß der Beschriftung und dem Index abgefragt, die aus Gleichung erhalten werden können. 6 für die erweiterte Stichprobe Alle Ziele erreichen und erweiterte Statistiken erhalten.
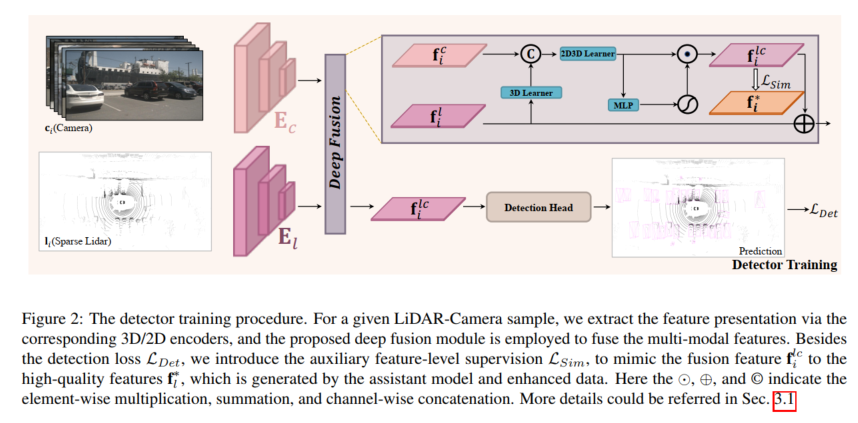
Deep Fusion
Um die hochwertigen Funktionen zu simulieren, die durch erweiterte LiDAR-Daten generiert werden, ist das Fusionsmodell darauf ausgelegt, die fehlenden Informationen spärlicher Ziele aus den satten Farb- und Kontextfunktionen in der Kameraeingabe zu extrahieren. Zu diesem Zweck schlägt dieser Artikel ein Deep-Fusion-Modul vor, um Bildfunktionen zu nutzen und Lidar-Demonstrationen durchzuführen. Die vorgeschlagene Deep Fusion besteht hauptsächlich aus 3D-Lernern und 2D-3D-Lernern. Der 3D-Learner ist eine einfache Faltungsschicht, die zum Übertragen von 3D-Renderings in den 2D-Raum verwendet wird. Um dann 2D-Features und 3D-Renderings (z. B. im 2D-Raum) zu verbinden, wird ein 2D-3D-Lerner verwendet, um LiDAR-Kamerafunktionen zu fusionieren. Schließlich werden die fusionierten Features durch MLP und Aktivierungsfunktionen gewichtet, die als Ausgabe des Deep-Fusion-Moduls wieder zu den ursprünglichen Lidar-Features hinzugefügt werden. Der 2D-3D-Lerner besteht aus gestapelten MLP-Blöcken der Tiefe K und lernt, Kamerafunktionen zu nutzen, um LIDAR-Darstellungen spärlicher Ziele zu vervollständigen und hochwertige Merkmale dichter LIDAR-Ziele zu simulieren.
Experimentelle Vergleichsanalyse
Experimentelle Ergebnisse (mAP@R40 %). Hier sind drei Kategorien von einfachen, mittleren (mod.) und harten Fällen sowie die Gesamtleistung aufgeführt. Hier repräsentieren L, LC, LC* den entsprechenden Lidar-Detektor, den Lidar-Kamera-Fusionsdetektor und die Ergebnisse des Vorschlags dieses Artikels. Δ steht für eine Verbesserung. Die besten Ergebnisse sind fett gedruckt, wobei L voraussichtlich das Hilfsmodell ist und mit dem erweiterten Validierungssatz getestet wird. MVXNet wird basierend auf mmdetection3d neu implementiert. PV-RCNN-LC und Voxel RCNN LC werden basierend auf dem Open-Source-Code von VFF neu implementiert.
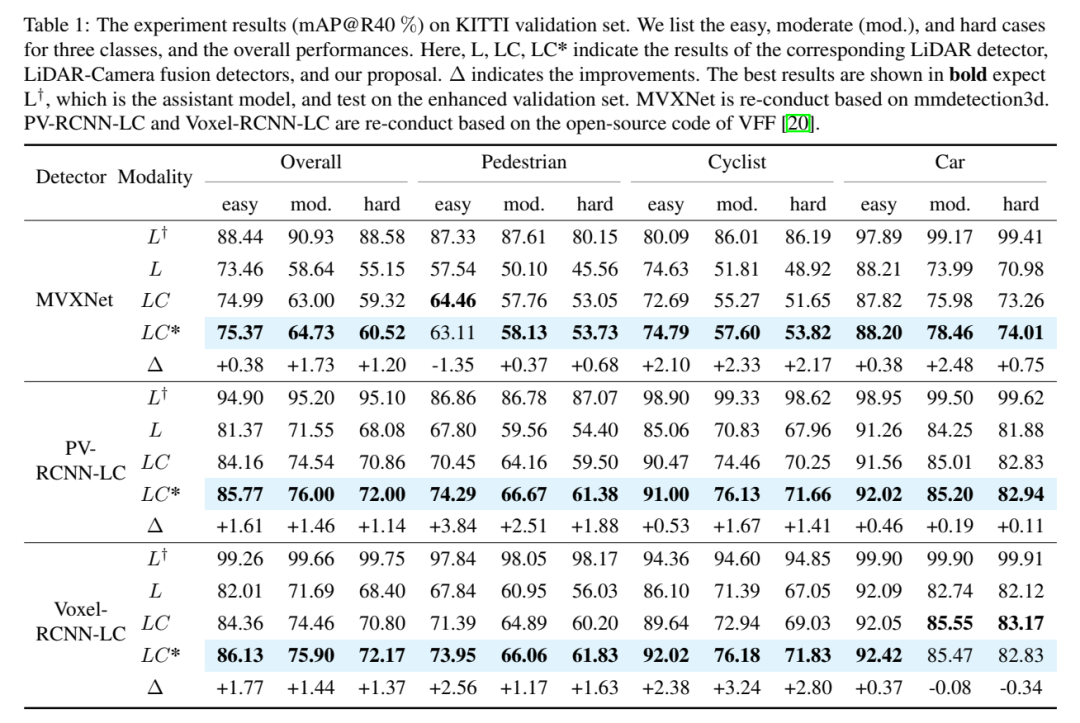
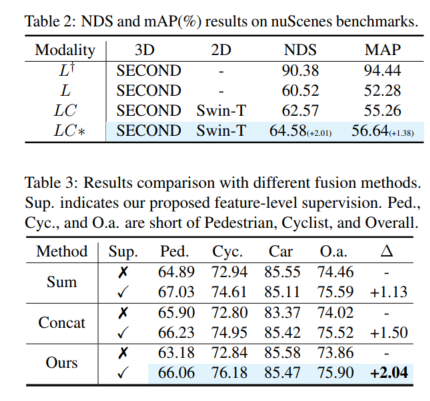
Umgeschriebener Inhalt: Gesamtleistung. Gemäß den Vergleichsergebnissen in Tabelle 1 zeigt der Vergleich von 3DmAP@R40 basierend auf drei Detektoren die Gesamtleistung jeder Kategorie und jeder Schwierigkeitsklasse. Es ist deutlich zu erkennen, dass durch die Einführung eines zusätzlichen Kameraeingangs die Lidar-Kameramethode (LC) den Lidar-basierten Detektor (L) in der Leistung übertrifft. Durch die Einführung von Polarsampling zeigt das Hilfsmodell (L†) eine bewundernswerte Leistung auf dem erweiterten Validierungssatz (z. B. über 90 % mAP). Durch die zusätzliche Überwachung mit hochwertigen Funktionen und dem vorgeschlagenen Deep-Fusion-Modul verbessert unser Vorschlag kontinuierlich die Erkennungsgenauigkeit. Im Vergleich zum Basismodell (LC) erreicht unser Vorschlag beispielsweise eine 3D-mAP-Verbesserung von +1,54 % bzw. +1,24 % bei mittleren und harten Zielen. Darüber hinaus haben wir auch Experimente mit dem nuScenes-Benchmark auf Basis von SECOND-LC durchgeführt. Wie in Tabelle 2 gezeigt, wurden NDS und mAP um +2,01 % bzw. +1,38 % verbessert. Im Vergleich zum Basismodell verbessern SupFusion und Deep Fusion nicht nur die Gesamtleistung, sondern auch die Erkennungsleistung jeder Kategorie, einschließlich Fußgänger. Beim Vergleich der durchschnittlichen Verbesserung in drei Kategorien (z. B. mittlerer Fall) können folgende Beobachtungen gemacht werden: Radfahrer sahen die größte Verbesserung (+2,41 %), während Fußgänger und Autos Verbesserungen von +1,35 % bzw. +0,86 % verzeichneten. Die Gründe liegen auf der Hand: (1) Autos sind leichter zu erkennen und erzielen bessere Ergebnisse als Fußgänger und Radfahrer und daher schwieriger zu verbessern. (2) Radfahrer erzielen mehr Verbesserungen als Fußgänger, da Fußgänger kein Raster bilden und weniger dichte Ziele erzeugen als Radfahrer und daher geringere Leistungsverbesserungen erzielen!
 Bitte klicken Sie auf den folgenden Link, um den Originalinhalt anzuzeigen: https://mp.weixin.qq.com/s/vWew2p9TrnzK256y-A4UFw
Bitte klicken Sie auf den folgenden Link, um den Originalinhalt anzuzeigen: https://mp.weixin.qq.com/s/vWew2p9TrnzK256y-A4UFw

Das obige ist der detaillierte Inhalt vonSupFusion: Erforschen Sie, wie Lidar-Kamera-fusionierte 3D-Erkennungsnetzwerke effektiv überwacht werden können?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Was? Wird Zootopia durch heimische KI in die Realität umgesetzt? Zusammen mit dem Video wird ein neues groß angelegtes inländisches Videogenerationsmodell namens „Keling“ vorgestellt. Sora geht einen ähnlichen technischen Weg und kombiniert eine Reihe selbst entwickelter technologischer Innovationen, um Videos zu produzieren, die nicht nur große und vernünftige Bewegungen aufweisen, sondern auch die Eigenschaften der physischen Welt simulieren und über starke konzeptionelle Kombinationsfähigkeiten und Vorstellungskraft verfügen. Den Daten zufolge unterstützt Keling die Erstellung ultralanger Videos von bis zu 2 Minuten mit 30 Bildern pro Sekunde, mit Auflösungen von bis zu 1080p und unterstützt mehrere Seitenverhältnisse. Ein weiterer wichtiger Punkt ist, dass es sich bei Keling nicht um eine vom Labor veröffentlichte Demo oder Video-Ergebnisdemonstration handelt, sondern um eine Anwendung auf Produktebene, die von Kuaishou, einem führenden Anbieter im Bereich Kurzvideos, gestartet wurde. Darüber hinaus liegt das Hauptaugenmerk darauf, pragmatisch zu sein, keine Blankoschecks auszustellen und sofort nach der Veröffentlichung online zu gehen. Das große Modell von Ke Ling wurde bereits in Kuaiying veröffentlicht.
 Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Ich weine zu Tode. Die Daten im Internet reichen überhaupt nicht aus. Das Trainingsmodell sieht aus wie „Die Tribute von Panem“, und KI-Forscher auf der ganzen Welt machen sich Gedanken darüber, wie sie diese datenhungrigen Esser ernähren sollen. Dieses Problem tritt insbesondere bei multimodalen Aufgaben auf. Zu einer Zeit, als sie ratlos waren, nutzte ein Start-up-Team der Abteilung der Renmin-Universität von China sein eigenes neues Modell, um als erstes in China einen „modellgenerierten Datenfeed selbst“ in die Realität umzusetzen. Darüber hinaus handelt es sich um einen zweigleisigen Ansatz auf der Verständnisseite und der Generierungsseite. Beide Seiten können hochwertige, multimodale neue Daten generieren und Datenrückmeldungen an das Modell selbst liefern. Was ist ein Modell? Awaker 1.0, ein großes multimodales Modell, das gerade im Zhongguancun-Forum erschienen ist. Wer ist das Team? Sophon-Motor. Gegründet von Gao Yizhao, einem Doktoranden an der Hillhouse School of Artificial Intelligence der Renmin University.
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Kürzlich wurde die Militärwelt von der Nachricht überwältigt: US-Militärkampfflugzeuge können jetzt mithilfe von KI vollautomatische Luftkämpfe absolvieren. Ja, erst kürzlich wurde der KI-Kampfjet des US-Militärs zum ersten Mal der Öffentlichkeit zugänglich gemacht und sein Geheimnis gelüftet. Der vollständige Name dieses Jägers lautet „Variable Stability Simulator Test Aircraft“ (VISTA). Er wurde vom Minister der US-Luftwaffe persönlich geflogen, um einen Eins-gegen-eins-Luftkampf zu simulieren. Am 2. Mai startete US-Luftwaffenminister Frank Kendall mit einer X-62AVISTA auf der Edwards Air Force Base. Beachten Sie, dass während des einstündigen Fluges alle Flugaktionen autonom von der KI durchgeführt wurden! Kendall sagte: „In den letzten Jahrzehnten haben wir über das unbegrenzte Potenzial des autonomen Luft-Luft-Kampfes nachgedacht, aber es schien immer unerreichbar.“ Nun jedoch,
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
