
 Technologie-Peripheriegeräte
KI
Erster Artikel: Ein neues Paradigma für das Training von 3D-Belegungsmodellen mit mehreren Ansichten, die nur 2D-Beschriftungen verwenden
Technologie-Peripheriegeräte
KI
Erster Artikel: Ein neues Paradigma für das Training von 3D-Belegungsmodellen mit mehreren Ansichten, die nur 2D-Beschriftungen verwenden
Erster Artikel: Ein neues Paradigma für das Training von 3D-Belegungsmodellen mit mehreren Ansichten, die nur 2D-Beschriftungen verwenden

Dieser Artikel wird mit Genehmigung des öffentlichen Kontos von Autonomous Driving Heart nachgedruckt. Bitte wenden Sie sich für einen Nachdruck an die Quelle.
[RenderOcc, das erste neue Paradigma zum Trainieren von 3D-Belegungsmodellen mit mehreren Ansichten, die nur 2D-Beschriftungen verwenden] Der Autor extrahiert volumetrische 3D-Darstellungen im NeRF-Stil aus Bildern mit mehreren Ansichten und verwendet die Volumenrendering-Technologie, um 2D-Rekonstruktionen zu erstellen und daraus eine semantische Transformation zu erreichen 2D-Direkte 3D-Überwachung mit Tiefenbeschriftungen reduziert die Abhängigkeit von teuren 3D-Belegungsanmerkungen. Umfangreiche Experimente zeigen, dass RenderOcc eine vergleichbare Leistung wie vollständig überwachte Modelle mit 3D-Beschriftungen erbringt, was die Bedeutung dieses Ansatzes in realen Anwendungen unterstreicht. Bereits Open Source.
Titel: RenderOcc: Vision-Centric 3D Occupancy Prediction with 2DRendering Supervision
Autorenzugehörigkeit: Peking University, Xiaomi Automobile, Hong Kong Chinese MMLAB
Der Inhalt, der neu geschrieben werden muss, ist: Open-Source-Adresse: GitHub – pmj110119/RenderOcc
3D-Besetzungsvorhersage, die 3D-Szenen in semantisch beschriftete Gitterzellen quantifiziert, verspricht wichtige Aussichten in den Bereichen Roboterwahrnehmung und autonomes Fahren. Neuere Arbeiten nutzen zur Überwachung hauptsächlich vollständige Belegungsbezeichnungen im 3D-Voxelraum. Allerdings schränken teure Annotationsverfahren und manchmal mehrdeutige Beschriftungen die Benutzerfreundlichkeit und Skalierbarkeit von 3D-Belegungsmodellen erheblich ein. Um dieses Problem zu lösen, schlagen die Autoren RenderOcc vor, ein neues Paradigma zum Trainieren von 3D-Belegungsmodellen, die nur 2D-Beschriftungen verwenden. Insbesondere extrahieren wir volumetrische 3D-Darstellungen im NeRF-Stil aus Bildern mit mehreren Ansichten und verwenden Volumenrendering-Techniken, um 2D-Rekonstruktionen zu erstellen, was eine direkte 3D-Überwachung anhand von 2D-Semantik- und Tiefenbezeichnungen ermöglicht. Darüber hinaus stellen die Autoren eine Hilfsstrahlmethode zur Lösung des Problems spärlicher Blickwinkel in autonomen Fahrszenen vor, die sequentielle Frames nutzt, um ein umfassendes 2D-Rendering für jedes Ziel zu erstellen. RenderOcc ist der erste Versuch, ein 3D-Belegungsmodell mit mehreren Ansichten nur mithilfe von 2D-Beschriftungen zu trainieren und so die Abhängigkeit von teuren 3D-Belegungsanmerkungen zu reduzieren. Umfangreiche Experimente zeigen, dass RenderOcc eine vergleichbare Leistung wie vollständig überwachte Modelle mit 3D-Beschriftungen erbringt, was die Bedeutung dieses Ansatzes in realen Anwendungen unterstreicht.
Netzwerkstruktur:
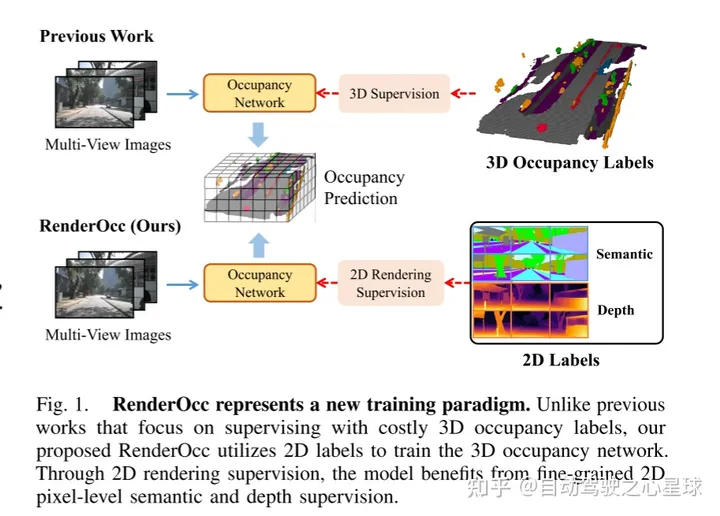
Abbildung 1 zeigt eine neue Trainingsmethode von RenderOcc. Im Gegensatz zu früheren Methoden, die zur Überwachung auf teure 3D-Belegungsetiketten angewiesen sind, verwendet das in diesem Dokument vorgeschlagene RenderOcc 2D-Beschriftungen, um das 3D-Belegungsnetzwerk zu trainieren. Mit der 2D-Rendering-Überwachung kann das Modell von einer feinkörnigen 2D-Pixelebenen-Semantik und Tiefenüberwachung profitieren
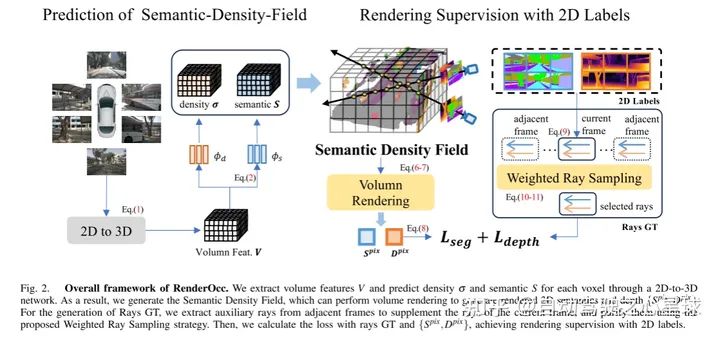
Abbildung 2. Das Gesamtgerüst von RenderOcc. Dieser Artikel extrahiert volumetrische Merkmale über ein 2D-zu-3D-Netzwerk und sagt die Dichte und Semantik jedes Voxels voraus. Daher generiert dieser Artikel ein semantisches Dichtefeld, das Volumenrendering durchführen kann, um gerenderte 2D-Semantik und -Tiefe zu erzeugen. Für die Erzeugung von Rays GT extrahiert dieser Artikel Hilfsstrahlen aus benachbarten Frames, um die Strahlen des aktuellen Frames zu ergänzen, und verwendet die vorgeschlagene gewichtete Ray-Sampling-Strategie, um sie zu reinigen. Dann verwendet dieser Artikel Light GT und {}, um den Verlust zu berechnen und eine Rendering-Überwachung von 2D-Beschriftungen zu erreichen
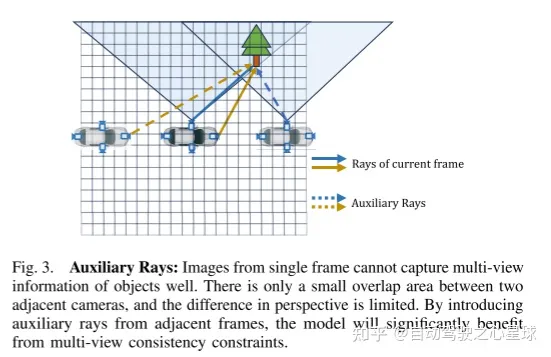
Umgeschriebener Inhalt: Abbildung 3. Hilfslicht: Ein Einzelbild kann die Mehrfachansichtsinformationen des Objekts nicht gut erfassen. Es gibt nur einen kleinen Überlappungsbereich zwischen benachbarten Kameras und der Unterschied im Blickwinkel ist begrenzt. Durch die Einführung von Hilfsstrahlen aus benachbarten Frames kann das Modell erheblich von Konsistenzbeschränkungen bei mehreren Ansichten profitieren


Der Inhalt, der neu geschrieben werden muss, ist: Originallink: https://mp.weixin.qq.com/s/WzI8mGoIOTOdL8irXrbSPQ
Das obige ist der detaillierte Inhalt vonErster Artikel: Ein neues Paradigma für das Training von 3D-Belegungsmodellen mit mehreren Ansichten, die nur 2D-Beschriftungen verwenden. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1385
1385
 52
52

 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI verändert tatsächlich die Mathematik. Vor kurzem hat Tao Zhexuan, der diesem Thema große Aufmerksamkeit gewidmet hat, die neueste Ausgabe des „Bulletin of the American Mathematical Society“ (Bulletin der American Mathematical Society) weitergeleitet. Zum Thema „Werden Maschinen die Mathematik verändern?“ äußerten viele Mathematiker ihre Meinung. Der gesamte Prozess war voller Funken, knallhart und aufregend. Der Autor verfügt über eine starke Besetzung, darunter der Fields-Medaillengewinner Akshay Venkatesh, der chinesische Mathematiker Zheng Lejun, der NYU-Informatiker Ernest Davis und viele andere bekannte Wissenschaftler der Branche. Die Welt der KI hat sich dramatisch verändert. Viele dieser Artikel wurden vor einem Jahr eingereicht.
 Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Die von Google geförderte Leistung von JAX hat in jüngsten Benchmark-Tests die von Pytorch und TensorFlow übertroffen und belegt bei 7 Indikatoren den ersten Platz. Und der Test wurde nicht auf der TPU mit der besten JAX-Leistung durchgeführt. Obwohl unter Entwicklern Pytorch immer noch beliebter ist als Tensorflow. Aber in Zukunft werden möglicherweise mehr große Modelle auf Basis der JAX-Plattform trainiert und ausgeführt. Modelle Kürzlich hat das Keras-Team drei Backends (TensorFlow, JAX, PyTorch) mit der nativen PyTorch-Implementierung und Keras2 mit TensorFlow verglichen. Zunächst wählen sie eine Reihe von Mainstream-Inhalten aus
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Das neueste Video von Teslas Roboter Optimus ist veröffentlicht und er kann bereits in der Fabrik arbeiten. Bei normaler Geschwindigkeit sortiert es Batterien (Teslas 4680-Batterien) so: Der Beamte hat auch veröffentlicht, wie es bei 20-facher Geschwindigkeit aussieht – auf einer kleinen „Workstation“, pflücken und pflücken und pflücken: Dieses Mal wird es freigegeben. Eines der Highlights Der Vorteil des Videos besteht darin, dass Optimus diese Arbeit in der Fabrik völlig autonom und ohne menschliches Eingreifen während des gesamten Prozesses erledigt. Und aus Sicht von Optimus kann es auch die krumme Batterie aufnehmen und platzieren, wobei der Schwerpunkt auf der automatischen Fehlerkorrektur liegt: In Bezug auf die Hand von Optimus gab der NVIDIA-Wissenschaftler Jim Fan eine hohe Bewertung ab: Die Hand von Optimus ist der fünffingrige Roboter der Welt am geschicktesten. Seine Hände sind nicht nur taktil
 FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
Die Zielerkennung ist ein relativ ausgereiftes Problem in autonomen Fahrsystemen, wobei die Fußgängererkennung einer der ersten Algorithmen ist, die eingesetzt werden. In den meisten Arbeiten wurde eine sehr umfassende Recherche durchgeführt. Die Entfernungswahrnehmung mithilfe von Fischaugenkameras für die Rundumsicht ist jedoch relativ wenig untersucht. Aufgrund der großen radialen Verzerrung ist es schwierig, die standardmäßige Bounding-Box-Darstellung in Fischaugenkameras zu implementieren. Um die obige Beschreibung zu vereinfachen, untersuchen wir erweiterte Begrenzungsrahmen-, Ellipsen- und allgemeine Polygondesigns in Polar-/Winkeldarstellungen und definieren eine mIOU-Metrik für die Instanzsegmentierung, um diese Darstellungen zu analysieren. Das vorgeschlagene Modell „fisheyeDetNet“ mit polygonaler Form übertrifft andere Modelle und erreicht gleichzeitig 49,5 % mAP auf dem Valeo-Fisheye-Kameradatensatz für autonomes Fahren
 Das Neueste von der Universität Oxford! Mickey: 2D-Bildabgleich in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Das Neueste von der Universität Oxford! Mickey: 2D-Bildabgleich in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Projektlink vorne geschrieben: https://nianticlabs.github.io/mickey/ Anhand zweier Bilder kann die Kameraposition zwischen ihnen geschätzt werden, indem die Korrespondenz zwischen den Bildern hergestellt wird. Normalerweise handelt es sich bei diesen Entsprechungen um 2D-zu-2D-Entsprechungen, und unsere geschätzten Posen sind maßstabsunabhängig. Einige Anwendungen, wie z. B. Instant Augmented Reality jederzeit und überall, erfordern eine Posenschätzung von Skalenmetriken und sind daher auf externe Tiefenschätzer angewiesen, um die Skalierung wiederherzustellen. In diesem Artikel wird MicKey vorgeschlagen, ein Keypoint-Matching-Prozess, mit dem metrische Korrespondenzen im 3D-Kameraraum vorhergesagt werden können. Durch das Erlernen des 3D-Koordinatenabgleichs zwischen Bildern können wir auf metrische Relativwerte schließen
