
 Technologie-Peripheriegeräte
KI
Verbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen
Technologie-Peripheriegeräte
KI
Verbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen
Verbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen

Titel der Abschlussarbeit: „Trajektorienplanungsmethode für autonome Fahrzeuge in unsicheren Umgebungen basierend auf einer verbesserten modellprädiktiven Steuerung“
Veröffentlichte Zeitschrift: IEEE Transactions on Intelligent Transportation Systems
Veröffentlichungsdatum: April 2023
Das Folgende sind meine eigenen Lesenotizen für die Arbeit Dies sind hauptsächlich die Teile, die meiner Meinung nach die Schlüsselpunkte sind, nicht die vollständige Textübersetzung. Dieser Artikel folgt dem vorherigen Artikel und sortiert den experimentellen Verifizierungsteil dieses Artikels. Der vorherige Artikel lautet wie folgt: Das Folgende sind meine eigenen Notizen zum Lesen des Artikels, hauptsächlich die Teile, die meiner Meinung nach die wichtigsten Punkte sind, nicht die vollständige Textübersetzung. Dieser Artikel folgt dem vorherigen Artikel und sortiert den experimentellen Überprüfungsteil dieses Artikels. Der vorherige Artikel lautet wie folgt:
fhwim: Eine Trajektorienplanungsmethode basierend auf einer verbesserten modellprädiktiven Steuerung für autonome Fahrzeuge in unsicheren Umgebungen
https://zhuanlan.zhihu.com/p/658708080
1. Simulationsüberprüfung
(1) Simulationsumgebung
Zu den Co-Simulationstools gehören Prescan, PyCharm, Matlab/Simulink, darunter Prescan zum Erstellen simulierter Verkehrsszenen und PyCharm (einfach mit neuronalem Netzwerk oder Pytorch) zum Schreiben des Fusionsvorhersagemoduls , Matlab/Simulink (mit MPC-Toolbox) wird verwendet, um das Trajektorienplanungsmodul zu erstellen und die Fahrzeugsteuerung zu realisieren. Die allgemeine Idee der Werkzeugauswahl ist relativ natürlich und vernünftig. Die zur Steuerung dieses Teils verwendete horizontale Steuerung ist LQR, und die vertikale Steuerung verwendet PID, was ebenfalls eine relativ häufige Steuerungsmethode ist. Der LSTM-Encoder-Decoder im Fusion-Vorhersagemodul verwendet Open-Source-Code. Der Autor sagte, er stamme aus der Referenz [31] Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances, aber ich habe gesehen, dass dieser Artikel im Jahr 2011 veröffentlicht wurde. Es ist etwas alt (wo war die LSTM-Encoder-Dekodierung im Jahr 2011? Ich weiß nicht, ob der Autor den Code auf dieser Grundlage geändert hat. Abbildung 1: Einrichtung der Simulationsumgebung 1: statische Vermeidung Hindernisszene
Statische Hindernisvermeidungsszene bezieht sich auf ein stehendes Hindernisfahrzeug. Das Ergebnis der Flugbahnplanung ist wie folgt: 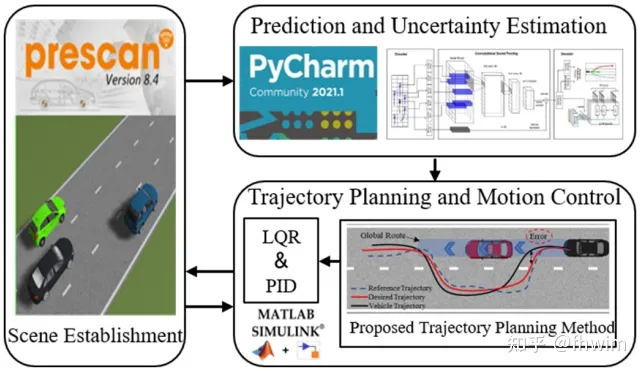
Vergleichen Sie die allgemeine MPC-Methode und die Pipeline-basierte MPC-Methode in Abbildung 3
Hier vermute ich, dass er eine Legende hat Frage: Laut dem vorherigen Artikel wird die endgültige Referenztrajektorie durch Addition der gewünschten Trajektorie und der Anpassungstrajektorie erhalten. Gleichzeitig sagte er bei der Analyse der Ergebnisse auch, dass der rohrbasierte MPC in den Bereichen 
 in Abbildung 3(b) Der Fehler ist groß. Da die Anpassungs-Trajektorie den Fehler verringert, sollte es mit der Logik seines Artikels übereinstimmen, dass die beiden Legenden der gewünschten Trajektorie und der Referenz-Trajektorie in Abbildung 3(b). ) sollte ausgetauscht werden. Das heißt, die grüne Linie ist die endgültige Referenztrajektorie. Die blaue Linie ist die gewünschte Trajektorie des Zwischenergebnisses. Einschließlich der Geschwindigkeitskurve und der horizontalen und vertikalen Fehlerkurven unten, aber Sie können wahrscheinlich verstehen, was der Autor meint. Die grüne Kurve im röhrenbasierten MPC ist das Endergebnis und die blaue Kurve ist das Ergebnis ohne Anpassungsbahn.
in Abbildung 3(b) Der Fehler ist groß. Da die Anpassungs-Trajektorie den Fehler verringert, sollte es mit der Logik seines Artikels übereinstimmen, dass die beiden Legenden der gewünschten Trajektorie und der Referenz-Trajektorie in Abbildung 3(b). ) sollte ausgetauscht werden. Das heißt, die grüne Linie ist die endgültige Referenztrajektorie. Die blaue Linie ist die gewünschte Trajektorie des Zwischenergebnisses. Einschließlich der Geschwindigkeitskurve und der horizontalen und vertikalen Fehlerkurven unten, aber Sie können wahrscheinlich verstehen, was der Autor meint. Die grüne Kurve im röhrenbasierten MPC ist das Endergebnis und die blaue Kurve ist das Ergebnis ohne Anpassungsbahn.

Abbildung 4 zeigt den Vergleich der Geschwindigkeitsänderungen zwischen der allgemeinen MPC-Methode und der Pipeline-basierten MPC-Methode.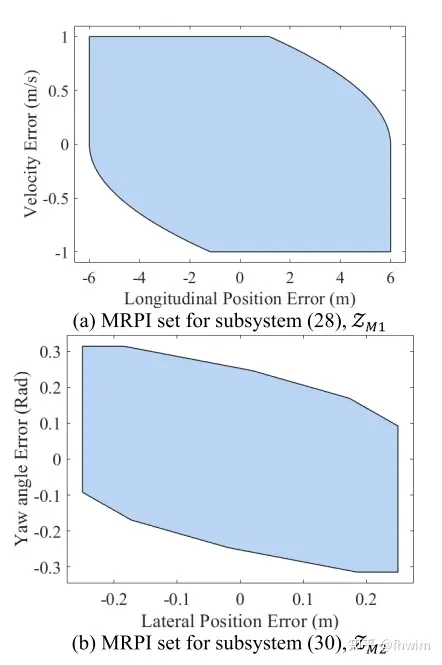
Abbildung 5 Vergleich der Querpositionen die horizontalen und vertikalen Fehler Abbildung 6
Der Autor hat auch die Sanftheit der Lenkradwinkeländerungen verglichen, auf die ich hier nicht näher eingehen werde. Kurz gesagt, sie hat sich verbessert. Gleichzeitig schlug der Autor eine gute theoretische Grundlage für die Anpassung der Flugbahn vor. Nach dem Hinzufügen liegt der Flugbahnfehler immer innerhalb des MRPI-Satzes, also der Spurabweichung der röhrenbasierten modellprädiktiven Steuerung (Röhrenbasierte MPC) liegt immer innerhalb des MRPI-Sets. Die allgemeine modellprädiktive Steuerung (MPC) hat in einer unsicheren Umgebung keine Grenze, die sehr groß sein kann
(4) Fall 2: dynamische Hindernisvermeidungsszene
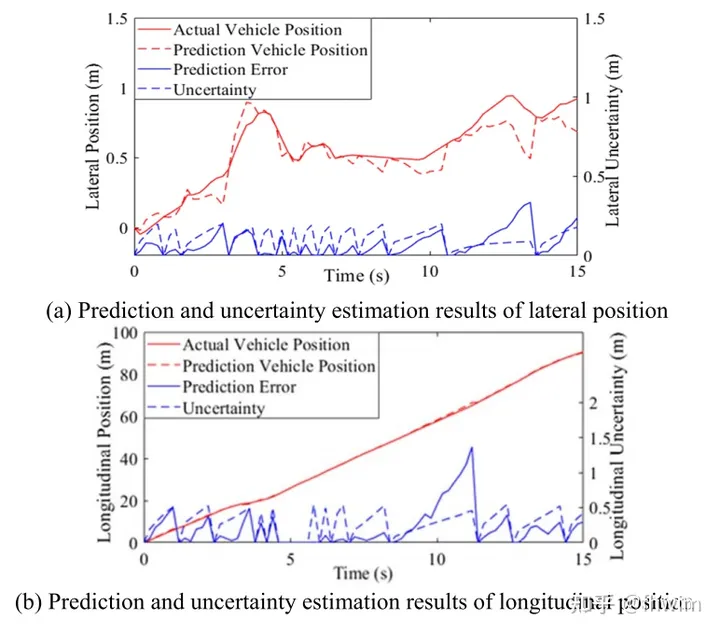
Im Vergleich dazu In der vorherigen Szene setzt sich nun das Hindernisauto in Bewegung. Wir werden nicht näher auf die Gesamtflugbahn, Geschwindigkeitsänderungen, horizontale und vertikale Fehler und die Sanftheit der Lenkradänderungen eingehen. Hier wird nur eine Veranschaulichung der gesamten Flugbahn gezeigt Der Autor entscheidet sich für die Verwendung des NGSIM-Datensatzes zur Validierung Ihrer Methode. Zunächst validierten die Autoren die Fusionsvorhersagemethode. Der NGSIM-Datensatz enthält Fahrzeugtrajektoriendaten, die der Autor in historische Trajektorien und zukünftige Trajektorien aufteilte und einen Trainingssatz für das Lernen des LSTM-Encoders/Decoders erstellte. Der Autor wählte 10.000 Trajektorien aus, von denen 7.500 als Trainingssatz und 2.500 als Validierungssatz verwendet wurden. Der Optimierer nimmt Adam und setzt die Lernrate auf 0,01. Der Vorhersageeffekt ist in der folgenden Abbildung dargestellt. FDE usw. Ich denke, dieser Ansatz ist nicht überzeugend, aber es kann auch verstanden werden, dass der Schwerpunkt dieses Artikels auf der Trajektorienplanung basierend auf röhrenbasiertem MPC liegt
Nach der Überprüfung der Trajektorienvorhersage wurde eine Trajektorienplanung durchgeführt, um die Rolle des Trajektorienvorhersagemoduls weiter zu überprüfen . Hier ist ein Vergleich. Es gibt drei Situationen: 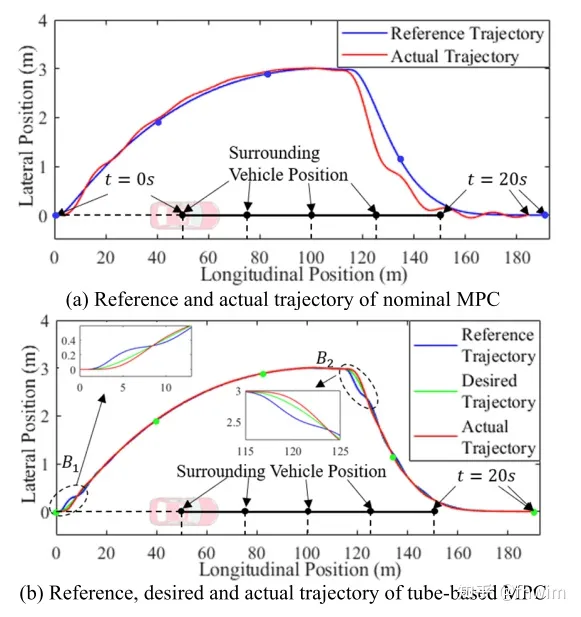
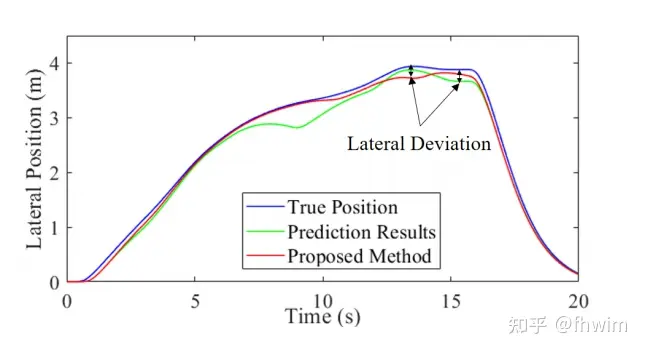
Abbildung 9 zeigt die Ergebnisse von (a), (b) und (c), entsprechend der wahren Position, den Vorhersageergebnissen bzw. der vorgeschlagenen Methode.
 Die vorgeschlagene Methode ist das Ergebnis, das mit der Methode in erhalten wurde In diesem Artikel können Sie sehen, dass die vorgeschlagene Methode näher an True Position liegt und zeigt, dass diese Fusionsvorhersagemethode (insbesondere die Berechnung der Unsicherheit) effektiv ist.
Die vorgeschlagene Methode ist das Ergebnis, das mit der Methode in erhalten wurde In diesem Artikel können Sie sehen, dass die vorgeschlagene Methode näher an True Position liegt und zeigt, dass diese Fusionsvorhersagemethode (insbesondere die Berechnung der Unsicherheit) effektiv ist.
Der Inhalt, der neu geschrieben werden muss, ist: Abbildung 11 Die Die Parameter des Computers und des Sensors
 müssen neu geschrieben werden. Der Inhalt lautet: Parameter des Versuchsfahrzeugs, Abbildung 12
müssen neu geschrieben werden. Der Inhalt lautet: Parameter des Versuchsfahrzeugs, Abbildung 12
Aus Sicherheitsgründen ist die vom Autor eingerichtete Versuchsszene dieselbe wie die Simulationsexperimentfall 1. Es handelt sich um eine statische Hindernisvermeidungsszene. Es ist besser, die Gesamtflugbahn, Geschwindigkeitsänderungen, horizontale und vertikale Fehler zu vergleichen. und die Sanftheit der Lenkradveränderungen, die nicht im Detail beschrieben werden.
3. Zusammenfassung der Lektüre
Zunächst geht es in der Arbeit um das Trajektorienvorhersagemodul mit Unsicherheitsberechnung und das auf röhrenbasiertem MPC basierende Trajektorienplanungsmodul. Unter ihnen ist das Trajektorienplanungsmodul der Hauptinhalt. Ich bin mit dieser modularen Form sehr zufrieden, da sie die Flugbahnvorhersage wirklich auf die Flugbahnplanung anwendet. Die Vorhersageausgabe wird als Planungseingabe verwendet, und das Planungsmodul bestimmt nur einen Sicherheitsschwellenwert für das Vorhersagemodul, und die Kopplung zwischen den beiden Modulen ist schwach. Mit anderen Worten: Das Vorhersagemodul kann durch andere Methoden ersetzt werden, solange es die Ergebnisse der Vorhersage der Flugbahn und der Unsicherheit des Hindernisautos liefern kann. In Zukunft könnten fortschrittlichere neuronale Netze in Betracht gezogen werden, um Flugbahnen und Unsicherheiten direkt vorherzusagen. Insgesamt ist der Prozess dieses Fusionsvorhersagealgorithmus etwas kompliziert, aber ich finde die Idee des Artikels sehr gut. Auch die Ideen und der Arbeitsaufwand der Simulation und der tatsächlichen Fahrzeugtests sind zufriedenstellend
Zweitens wurden beim Lesen des Artikels einige geringfügige Fehler entdeckt. Im LSTM-Encoder-Decoder-Teil ist die LSTM-Ausgabe beispielsweise der Trajektorienpunkt des zukünftigen -Schritts, der auch in der Formel geschrieben ist, im Text jedoch als geschrieben ist.

Abbildung 13 Einige Fehler im LSTM-Encoder-Decoder-Teil
Dann wird im Simulationsexperimentteil bei der Berechnung des MRPI-Sets gesagt, dass System (21), also das Fehlersystem, in Subsysteme unterteilt ist (32) und (34), aber eigentlich Subsysteme (30) und (32), diese kleinen Fehler wirken sich nicht auf die Gesamtmethode aus, sondern wirken sich auch auf das Leseerlebnis des Lesers aus.

Abbildung 14 Simulationsexperiment Teil MRPI Originaltext festlegen
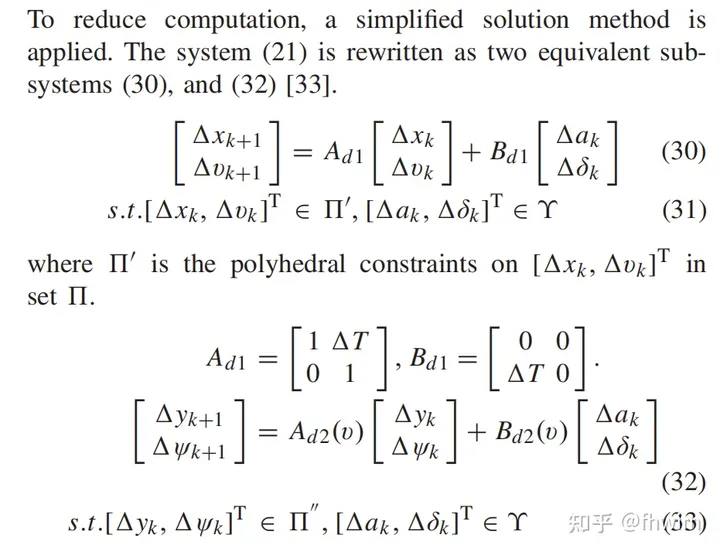
Das Fehlersystem in Abbildung 15 ist in die Subsysteme (30) und (32) unterteilt

Originaltext-Link: https://mp . weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
Das obige ist der detaillierte Inhalt vonVerbesserung der Trajektorienplanungsmethoden für autonomes Fahren in unsicheren Umgebungen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen



 Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Oben geschrieben und persönliches Verständnis des Autors. Dreidimensionales Gaussplatting (3DGS) ist eine transformative Technologie, die in den letzten Jahren in den Bereichen explizite Strahlungsfelder und Computergrafik entstanden ist. Diese innovative Methode zeichnet sich durch die Verwendung von Millionen von 3D-Gaußkurven aus, was sich stark von der Neural Radiation Field (NeRF)-Methode unterscheidet, die hauptsächlich ein implizites koordinatenbasiertes Modell verwendet, um räumliche Koordinaten auf Pixelwerte abzubilden. Mit seiner expliziten Szenendarstellung und differenzierbaren Rendering-Algorithmen garantiert 3DGS nicht nur Echtzeit-Rendering-Fähigkeiten, sondern führt auch ein beispielloses Maß an Kontrolle und Szenenbearbeitung ein. Dies positioniert 3DGS als potenziellen Game-Changer für die 3D-Rekonstruktion und -Darstellung der nächsten Generation. Zu diesem Zweck geben wir erstmals einen systematischen Überblick über die neuesten Entwicklungen und Anliegen im Bereich 3DGS.
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
0. Vorab geschrieben&& Persönliches Verständnis, dass autonome Fahrsysteme auf fortschrittlichen Wahrnehmungs-, Entscheidungs- und Steuerungstechnologien beruhen, indem sie verschiedene Sensoren (wie Kameras, Lidar, Radar usw.) verwenden, um die Umgebung wahrzunehmen, und Algorithmen und Modelle verwenden für Echtzeitanalysen und Entscheidungsfindung. Dies ermöglicht es Fahrzeugen, Verkehrszeichen zu erkennen, andere Fahrzeuge zu erkennen und zu verfolgen, das Verhalten von Fußgängern vorherzusagen usw. und sich so sicher an komplexe Verkehrsumgebungen anzupassen. Diese Technologie erregt derzeit große Aufmerksamkeit und gilt als wichtiger Entwicklungsbereich für die Zukunft des Transportwesens . eins. Aber was autonomes Fahren schwierig macht, ist herauszufinden, wie man dem Auto klarmachen kann, was um es herum passiert. Dies erfordert, dass der dreidimensionale Objekterkennungsalgorithmus im autonomen Fahrsystem Objekte in der Umgebung, einschließlich ihrer Standorte, genau wahrnehmen und beschreiben kann.
 Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Der Artikel von StableDiffusion3 ist endlich da! Dieses Modell wurde vor zwei Wochen veröffentlicht und verwendet die gleiche DiT-Architektur (DiffusionTransformer) wie Sora. Nach seiner Veröffentlichung sorgte es für großes Aufsehen. Im Vergleich zur Vorgängerversion wurde die Qualität der von StableDiffusion3 generierten Bilder erheblich verbessert. Es unterstützt jetzt Eingabeaufforderungen mit mehreren Themen, und der Textschreibeffekt wurde ebenfalls verbessert, und es werden keine verstümmelten Zeichen mehr angezeigt. StabilityAI wies darauf hin, dass es sich bei StableDiffusion3 um eine Reihe von Modellen mit Parametergrößen von 800 M bis 8 B handelt. Durch diesen Parameterbereich kann das Modell direkt auf vielen tragbaren Geräten ausgeführt werden, wodurch der Einsatz von KI deutlich reduziert wird
 Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Die Trajektorienvorhersage spielt eine wichtige Rolle beim autonomen Fahren. Unter autonomer Fahrtrajektorienvorhersage versteht man die Vorhersage der zukünftigen Fahrtrajektorie des Fahrzeugs durch die Analyse verschiedener Daten während des Fahrvorgangs. Als Kernmodul des autonomen Fahrens ist die Qualität der Trajektorienvorhersage von entscheidender Bedeutung für die nachgelagerte Planungssteuerung. Die Trajektorienvorhersageaufgabe verfügt über einen umfangreichen Technologie-Stack und erfordert Vertrautheit mit der dynamischen/statischen Wahrnehmung des autonomen Fahrens, hochpräzisen Karten, Fahrspurlinien, Fähigkeiten in der neuronalen Netzwerkarchitektur (CNN&GNN&Transformer) usw. Der Einstieg ist sehr schwierig! Viele Fans hoffen, so schnell wie möglich mit der Flugbahnvorhersage beginnen zu können und Fallstricke zu vermeiden. Heute werde ich eine Bestandsaufnahme einiger häufiger Probleme und einführender Lernmethoden für die Flugbahnvorhersage machen! Einführungsbezogenes Wissen 1. Sind die Vorschaupapiere in Ordnung? A: Schauen Sie sich zuerst die Umfrage an, S
 FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
Die Zielerkennung ist ein relativ ausgereiftes Problem in autonomen Fahrsystemen, wobei die Fußgängererkennung einer der ersten Algorithmen ist, die eingesetzt werden. In den meisten Arbeiten wurde eine sehr umfassende Recherche durchgeführt. Die Entfernungswahrnehmung mithilfe von Fischaugenkameras für die Rundumsicht ist jedoch relativ wenig untersucht. Aufgrund der großen radialen Verzerrung ist es schwierig, die standardmäßige Bounding-Box-Darstellung in Fischaugenkameras zu implementieren. Um die obige Beschreibung zu vereinfachen, untersuchen wir erweiterte Begrenzungsrahmen-, Ellipsen- und allgemeine Polygondesigns in Polar-/Winkeldarstellungen und definieren eine mIOU-Metrik für die Instanzsegmentierung, um diese Darstellungen zu analysieren. Das vorgeschlagene Modell „fisheyeDetNet“ mit polygonaler Form übertrifft andere Modelle und erreicht gleichzeitig 49,5 % mAP auf dem Valeo-Fisheye-Kameradatensatz für autonomes Fahren
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
 SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
Originaltitel: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper-Link: https://arxiv.org/pdf/2402.02519.pdf Code-Link: https://github.com/HKUST-Aerial-Robotics/SIMPL Autor: Hong Kong University of Science und Technologie DJI-Papieridee: Dieses Papier schlägt eine einfache und effiziente Bewegungsvorhersagebasislinie (SIMPL) für autonome Fahrzeuge vor. Im Vergleich zum herkömmlichen Agent-Cent
