
 Technologie-Peripheriegeräte
KI
Tiefgreifendes Q-Learning-Verstärkungslernen mit der Roboterarmsimulation von Panda-Gym
Technologie-Peripheriegeräte
KI
Tiefgreifendes Q-Learning-Verstärkungslernen mit der Roboterarmsimulation von Panda-Gym
Tiefgreifendes Q-Learning-Verstärkungslernen mit der Roboterarmsimulation von Panda-Gym

Reinforcement Learning (RL) ist eine maschinelle Lernmethode, die es Agenten ermöglicht, durch Versuch und Irrtum zu lernen, wie sie sich in ihrer Umgebung verhalten sollen. Agenten werden dafür belohnt oder bestraft, dass sie Maßnahmen ergreifen, die zu den gewünschten Ergebnissen führen. Mit der Zeit lernt der Agent, Maßnahmen zu ergreifen, die seine erwartete Belohnung maximieren. RL-Agenten werden in der Regel mithilfe von Markov-Entscheidungsprozessen (MDPs) trainiert, die einen mathematischen Rahmen für sequentielle Entscheidungsprobleme modellieren. MDP besteht aus vier Teilen:
Aktion: Eine Reihe von Aktionen, die ein Agent ausführen kann.
- Übergangsfunktion: Eine Funktion, die die Wahrscheinlichkeit des Übergangs in einen neuen Zustand angesichts des aktuellen Zustands und der aktuellen Aktion vorhersagt.
- Belohnungsfunktion: Eine Funktion, die dem Agenten für jede Conversion eine Belohnung zuweist.
- Das Ziel des Agenten ist es, eine Richtlinienfunktion zu erlernen, die Zustände Aktionen zuordnet. Maximieren Sie die erwartete Rendite des Agenten im Laufe der Zeit durch eine Richtlinienfunktion.
- Deep Q-Learning ist ein Reinforcement-Learning-Algorithmus, der tiefe neuronale Netze nutzt, um Richtlinienfunktionen zu erlernen. Tiefe neuronale Netze nehmen den aktuellen Zustand als Eingabe und geben einen Wertevektor aus, wobei jeder Wert eine mögliche Aktion darstellt. Der Agent führt dann die Aktion basierend auf dem höchsten Wert aus.
Deep Q-Learning ist ein wertbasierter Reinforcement-Learning-Algorithmus, das heißt, er lernt den Wert jedes Zustands-Aktionspaars. Der Wert eines Zustands-Aktionspaars ist die erwartete Belohnung für den Agenten, diese Aktion in diesem Zustand auszuführen.
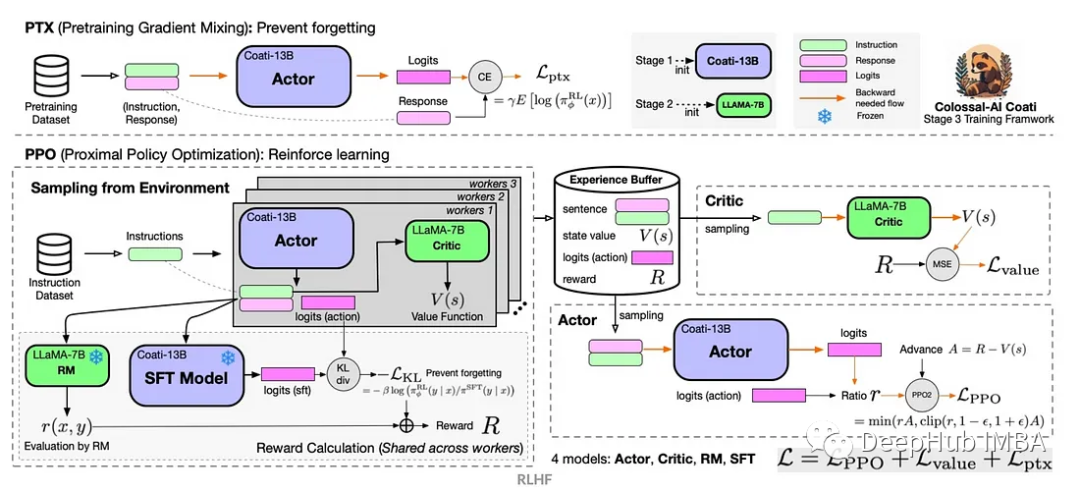
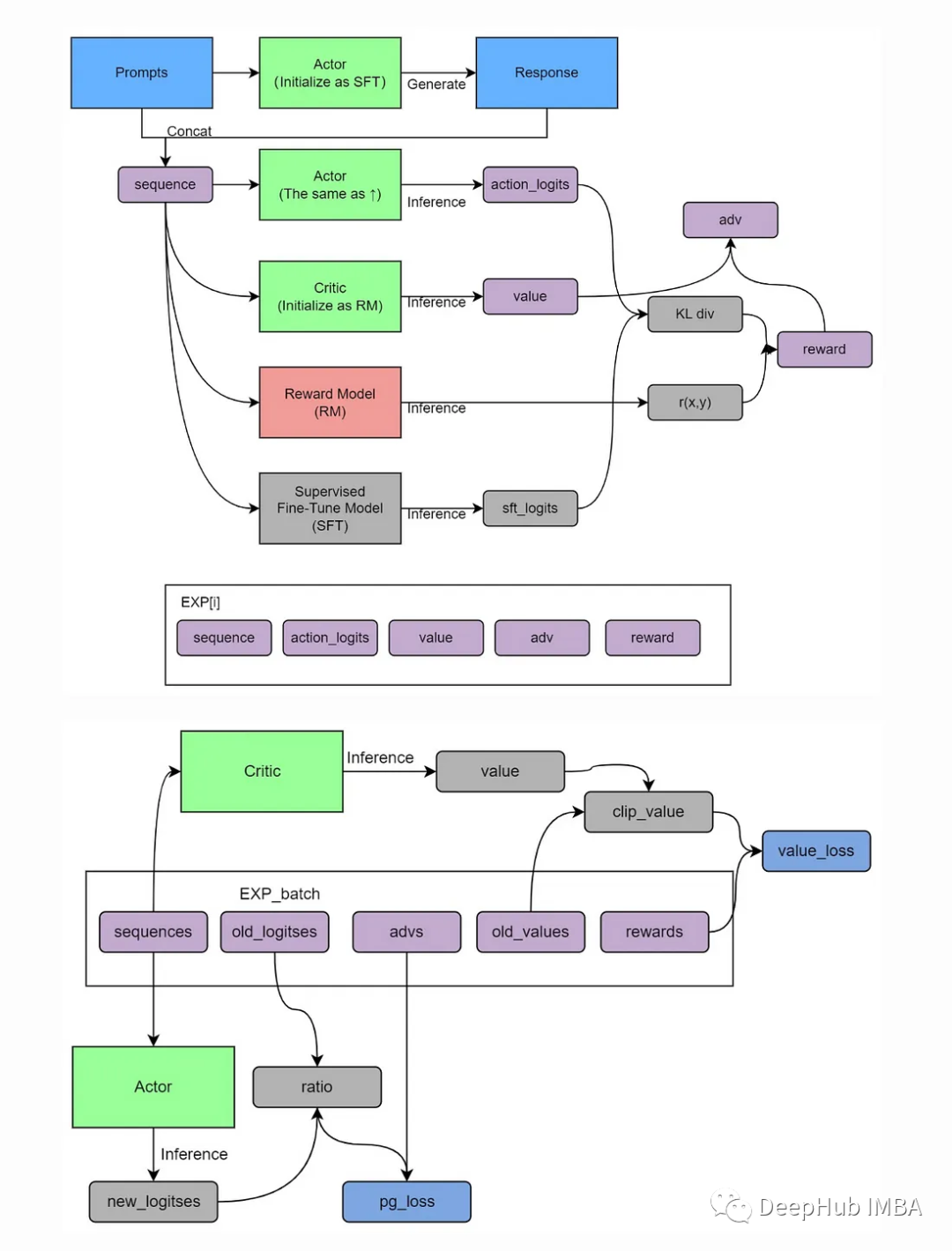
Actor-Critic ist ein RL-Algorithmus, der wertebasiert und richtlinienbasiert kombiniert. Es gibt zwei Komponenten:
Akteur: Der Akteur ist für die Auswahl von Operationen verantwortlich.
Kritiker: Verantwortlich für die Bewertung des Verhaltens des Schauspielers.
Schauspieler und Kritiker werden gleichzeitig ausgebildet. Akteure werden darin geschult, die erwarteten Belohnungen zu maximieren, und Kritiker werden darin geschult, die erwarteten Belohnungen für jedes Zustands-Aktions-Paar genau vorherzusagen.
Der Akteur-Kritiker-Algorithmus hat mehrere Vorteile gegenüber anderen Verstärkungslernalgorithmen. Erstens ist es stabiler, was bedeutet, dass es während des Trainings weniger wahrscheinlich zu Verzerrungen kommt. Zweitens ist es effizienter, was bedeutet, dass es schneller lernen kann. Drittens ist es besser skalierbar und kann auf Probleme mit großen Zustands- und Aktionsräumen angewendet werden
Die folgende Tabelle fasst die Hauptunterschiede zwischen Deep Q-Learning und Actor-Critic zusammen:
Vorteile von Actor- Critic (A2C)
 Actor-Critic ist eine beliebte Architektur für verstärkendes Lernen, die richtlinienbasierte und wertebasierte Ansätze kombiniert. Es hat viele Vorteile, die es zu einer guten Wahl für die Lösung verschiedener Verstärkungslernaufgaben machen:
Actor-Critic ist eine beliebte Architektur für verstärkendes Lernen, die richtlinienbasierte und wertebasierte Ansätze kombiniert. Es hat viele Vorteile, die es zu einer guten Wahl für die Lösung verschiedener Verstärkungslernaufgaben machen:
1. Geringe Varianz
Im Vergleich zu herkömmlichen Richtliniengradientenmethoden weist A2C normalerweise eine geringere Leistung beim Training der Varianz auf. Dies liegt daran, dass A2C sowohl den Richtliniengradienten als auch die Wertfunktion verwendet und die Wertfunktion verwendet, um die Varianz bei der Berechnung des Gradienten zu verringern. Geringe Varianz bedeutet, dass der Trainingsprozess stabiler ist und schneller zu einer besseren Richtlinie konvergieren kann.
2. Schnellere Lerngeschwindigkeit. Aufgrund der Merkmale geringer Varianz kann A2C eine Richtlinie normalerweise schneller erlernen Strategie. Dies ist besonders wichtig für Aufgaben, die umfangreiche Simulationen erfordern, da schnellere Lerngeschwindigkeiten wertvolle Zeit und Rechenressourcen sparen.
3. Kombination von Richtlinien- und Wertefunktion
Ein bemerkenswertes Merkmal von A2C ist, dass es gleichzeitig Richtlinien- und Wertefunktionen lernt. Diese Kombination ermöglicht es dem Agenten, die Korrelation zwischen Umgebung und Aktionen besser zu verstehen und so Richtlinienverbesserungen besser zu steuern. Das Vorhandensein der Wertfunktion trägt auch dazu bei, Fehler bei der Richtlinienoptimierung zu reduzieren und die Trainingseffizienz zu verbessern.
4. Unterstützt kontinuierliche und diskrete Aktionsräume
A2C kann sich an verschiedene Arten von Aktionsräumen anpassen, einschließlich kontinuierlicher und diskreter Aktionen, und ist sehr vielseitig. Dies macht A2C zu einem weit verbreiteten Reinforcement-Learning-Algorithmus, der auf eine Vielzahl von Aufgaben angewendet werden kann, von der Robotersteuerung bis zur Gameplay-Optimierung Verarbeitungsserver und verteilte Computerressourcen. Dies bedeutet, dass mehr empirische Daten in kürzerer Zeit gesammelt werden können, wodurch die Trainingseffizienz verbessert wird.
Obwohl schauspielerkritische Methoden einige Vorteile haben, stehen sie auch vor einigen Herausforderungen, wie z. B. Hyperparameter-Tuning und potenzieller Instabilität beim Training. Mit geeigneter Abstimmung und Techniken wie Experience Replay und Target Networks können diese Herausforderungen jedoch weitgehend gemildert werden, was Actor-Critic zu einer wertvollen Methode beim Reinforcement Learning macht
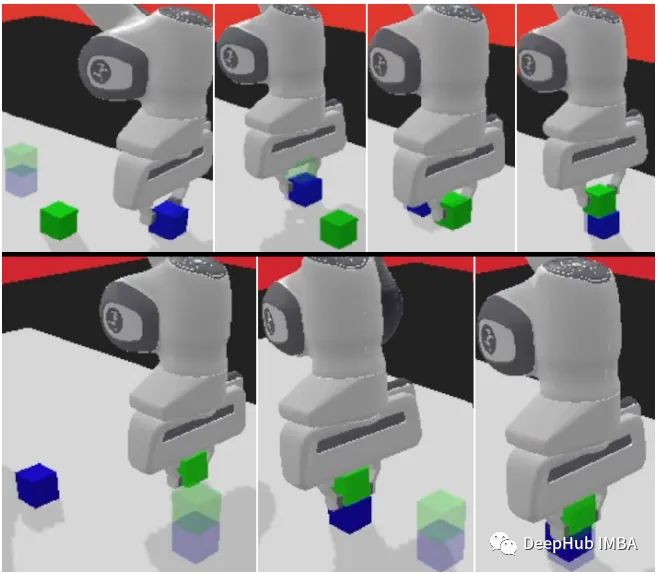
Panda-Gym
Panda-Gym wurde auf Basis der PyBullet-Engine entwickelt und umfasst 6 Aufgaben wie Greifen, Schieben, Schieben, Aufnehmen und Platzieren, Stapeln und Umdrehen des Panda-Roboterarms von OpenAI Fetch.
Wir verwenden Panda-Gym als Beispiel, um den folgenden Code zu zeigen
1. Installieren Sie die Bibliothek
Zuerst müssen wir den Code für die Verstärkungslernumgebung initialisieren:
!apt-get install -y \libgl1-mesa-dev \libgl1-mesa-glx \libglew-dev \xvfb \libosmesa6-dev \software-properties-common \patchelf !pip install \free-mujoco-py \pytorch-lightning \optuna \pyvirtualdisplay \PyOpenGL \PyOpenGL-accelerate\stable-baselines3[extra] \gymnasium \huggingface_sb3 \huggingface_hub \ panda_gym
2. Importieren Sie die Bibliothek
import os import gymnasium as gym import panda_gym from huggingface_sb3 import load_from_hub, package_to_hub from stable_baselines3 import A2C from stable_baselines3.common.evaluation import evaluate_policy from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize from stable_baselines3.common.env_util import make_vec_env
3. Erstellen Sie die Laufumgebung
env_id = "PandaReachDense-v3" # Create the env env = gym.make(env_id) # Get the state space and action space s_size = env.observation_space.shape a_size = env.action_space print("\n _____ACTION SPACE_____ \n") print("The Action Space is: ", a_size) print("Action Space Sample", env.action_space.sample()) # Take a random action4. Normalisierung von Beobachtungen und Belohnungen
Eine gute Möglichkeit, das Verstärkungslernen zu optimieren. Wir berechnen den laufenden Mittelwert und die Standardabweichung der Eingabemerkmale über den Wrapper. Normalisieren Sie auch Belohnungen, indem Sie norm_reward = True
env = make_vec_env(env_id, n_envs=4) env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
5 hinzufügen. Erstellen Sie ein A2C-Modell. Wir verwenden offizielle Agenten, die vom Stable-Baselines3-Team geschult wurden , Bewertung Agent
model = A2C(policy = "MultiInputPolicy",env = env,verbose=1)
Zusammenfassung
In „Panda-Gym“ ermöglicht uns die effektive Kombination aus Panda-Roboterarm und GYM-Umgebung, das Verstärkungslernen des Roboterarms einfach vor Ort durchzuführen,
Akteur-Kritiker Die Architektur bei der der Agent lernt, bei jedem Zeitschritt schrittweise Verbesserungen vorzunehmen, steht im Gegensatz zu einer spärlichen Belohnungsfunktion (bei der das Ergebnis binär ist), was die Actor-Critic-Methode für diese Art von Aufgabe besonders geeignet macht.
Durch die nahtlose Kombination von Richtlinienlernen und Wertschätzung ist der Roboteragent in der Lage, den Endeffektor des Roboterarms geschickt zu manipulieren und die angegebene Zielposition genau zu erreichen. Dies bietet nicht nur eine praktische Lösung für Aufgaben wie die Robotersteuerung, sondern hat auch das Potenzial, eine Vielzahl von Bereichen zu verändern, die eine agile und fundierte Entscheidungsfindung erfordern
Das obige ist der detaillierte Inhalt vonTiefgreifendes Q-Learning-Verstärkungslernen mit der Roboterarmsimulation von Panda-Gym. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1385
1385
 52
52

 15 empfohlene kostenlose Open-Source-Bildanmerkungstools
Mar 28, 2024 pm 01:21 PM
15 empfohlene kostenlose Open-Source-Bildanmerkungstools
Mar 28, 2024 pm 01:21 PM
Bei der Bildanmerkung handelt es sich um das Verknüpfen von Beschriftungen oder beschreibenden Informationen mit Bildern, um dem Bildinhalt eine tiefere Bedeutung und Erklärung zu verleihen. Dieser Prozess ist entscheidend für maschinelles Lernen, das dabei hilft, Sehmodelle zu trainieren, um einzelne Elemente in Bildern genauer zu identifizieren. Durch das Hinzufügen von Anmerkungen zu Bildern kann der Computer die Semantik und den Kontext hinter den Bildern verstehen und so den Bildinhalt besser verstehen und analysieren. Die Bildanmerkung hat ein breites Anwendungsspektrum und deckt viele Bereiche ab, z. B. Computer Vision, Verarbeitung natürlicher Sprache und Diagramm-Vision-Modelle. Sie verfügt über ein breites Anwendungsspektrum, z. B. zur Unterstützung von Fahrzeugen bei der Identifizierung von Hindernissen auf der Straße und bei der Erkennung und Diagnose von Krankheiten durch medizinische Bilderkennung. In diesem Artikel werden hauptsächlich einige bessere Open-Source- und kostenlose Bildanmerkungstools empfohlen. 1.Makesens
 In diesem Artikel erfahren Sie mehr über SHAP: Modellerklärung für maschinelles Lernen
Jun 01, 2024 am 10:58 AM
In diesem Artikel erfahren Sie mehr über SHAP: Modellerklärung für maschinelles Lernen
Jun 01, 2024 am 10:58 AM
In den Bereichen maschinelles Lernen und Datenwissenschaft stand die Interpretierbarkeit von Modellen schon immer im Fokus von Forschern und Praktikern. Mit der weit verbreiteten Anwendung komplexer Modelle wie Deep Learning und Ensemble-Methoden ist das Verständnis des Entscheidungsprozesses des Modells besonders wichtig geworden. Explainable AI|XAI trägt dazu bei, Vertrauen in maschinelle Lernmodelle aufzubauen, indem es die Transparenz des Modells erhöht. Eine Verbesserung der Modelltransparenz kann durch Methoden wie den weit verbreiteten Einsatz mehrerer komplexer Modelle sowie der Entscheidungsprozesse zur Erläuterung der Modelle erreicht werden. Zu diesen Methoden gehören die Analyse der Merkmalsbedeutung, die Schätzung des Modellvorhersageintervalls, lokale Interpretierbarkeitsalgorithmen usw. Die Merkmalswichtigkeitsanalyse kann den Entscheidungsprozess des Modells erklären, indem sie den Grad des Einflusses des Modells auf die Eingabemerkmale bewertet. Schätzung des Modellvorhersageintervalls
 Identifizieren Sie Über- und Unteranpassung anhand von Lernkurven
Apr 29, 2024 pm 06:50 PM
Identifizieren Sie Über- und Unteranpassung anhand von Lernkurven
Apr 29, 2024 pm 06:50 PM
In diesem Artikel wird vorgestellt, wie Überanpassung und Unteranpassung in Modellen für maschinelles Lernen mithilfe von Lernkurven effektiv identifiziert werden können. Unteranpassung und Überanpassung 1. Überanpassung Wenn ein Modell mit den Daten übertrainiert ist, sodass es daraus Rauschen lernt, spricht man von einer Überanpassung des Modells. Ein überangepasstes Modell lernt jedes Beispiel so perfekt, dass es ein unsichtbares/neues Beispiel falsch klassifiziert. Für ein überangepasstes Modell erhalten wir einen perfekten/nahezu perfekten Trainingssatzwert und einen schrecklichen Validierungssatz-/Testwert. Leicht geändert: „Ursache der Überanpassung: Verwenden Sie ein komplexes Modell, um ein einfaches Problem zu lösen und Rauschen aus den Daten zu extrahieren. Weil ein kleiner Datensatz als Trainingssatz möglicherweise nicht die korrekte Darstellung aller Daten darstellt. 2. Unteranpassung Heru.“
 Transparent! Eine ausführliche Analyse der Prinzipien der wichtigsten Modelle des maschinellen Lernens!
Apr 12, 2024 pm 05:55 PM
Transparent! Eine ausführliche Analyse der Prinzipien der wichtigsten Modelle des maschinellen Lernens!
Apr 12, 2024 pm 05:55 PM
Laienhaft ausgedrückt ist ein Modell für maschinelles Lernen eine mathematische Funktion, die Eingabedaten einer vorhergesagten Ausgabe zuordnet. Genauer gesagt ist ein Modell für maschinelles Lernen eine mathematische Funktion, die Modellparameter anpasst, indem sie aus Trainingsdaten lernt, um den Fehler zwischen der vorhergesagten Ausgabe und der wahren Bezeichnung zu minimieren. Beim maschinellen Lernen gibt es viele Modelle, z. B. logistische Regressionsmodelle, Entscheidungsbaummodelle, Support-Vektor-Maschinenmodelle usw. Jedes Modell verfügt über seine anwendbaren Datentypen und Problemtypen. Gleichzeitig gibt es viele Gemeinsamkeiten zwischen verschiedenen Modellen oder es gibt einen verborgenen Weg für die Modellentwicklung. Am Beispiel des konnektionistischen Perzeptrons können wir es durch Erhöhen der Anzahl verborgener Schichten des Perzeptrons in ein tiefes neuronales Netzwerk umwandeln. Wenn dem Perzeptron eine Kernelfunktion hinzugefügt wird, kann es in eine SVM umgewandelt werden. Dieses hier
 Die Entwicklung der künstlichen Intelligenz in der Weltraumforschung und der Siedlungstechnik
Apr 29, 2024 pm 03:25 PM
Die Entwicklung der künstlichen Intelligenz in der Weltraumforschung und der Siedlungstechnik
Apr 29, 2024 pm 03:25 PM
In den 1950er Jahren wurde die künstliche Intelligenz (KI) geboren. Damals entdeckten Forscher, dass Maschinen menschenähnliche Aufgaben wie das Denken ausführen können. Später, in den 1960er Jahren, finanzierte das US-Verteidigungsministerium künstliche Intelligenz und richtete Labore für die weitere Entwicklung ein. Forscher finden Anwendungen für künstliche Intelligenz in vielen Bereichen, etwa bei der Erforschung des Weltraums und beim Überleben in extremen Umgebungen. Unter Weltraumforschung versteht man die Erforschung des Universums, das das gesamte Universum außerhalb der Erde umfasst. Der Weltraum wird als extreme Umgebung eingestuft, da sich seine Bedingungen von denen auf der Erde unterscheiden. Um im Weltraum zu überleben, müssen viele Faktoren berücksichtigt und Vorkehrungen getroffen werden. Wissenschaftler und Forscher glauben, dass die Erforschung des Weltraums und das Verständnis des aktuellen Zustands aller Dinge dazu beitragen können, die Funktionsweise des Universums zu verstehen und sich auf mögliche Umweltkrisen vorzubereiten
 Implementierung von Algorithmen für maschinelles Lernen in C++: Häufige Herausforderungen und Lösungen
Jun 03, 2024 pm 01:25 PM
Implementierung von Algorithmen für maschinelles Lernen in C++: Häufige Herausforderungen und Lösungen
Jun 03, 2024 pm 01:25 PM
Zu den häufigsten Herausforderungen, mit denen Algorithmen für maschinelles Lernen in C++ konfrontiert sind, gehören Speicherverwaltung, Multithreading, Leistungsoptimierung und Wartbarkeit. Zu den Lösungen gehören die Verwendung intelligenter Zeiger, moderner Threading-Bibliotheken, SIMD-Anweisungen und Bibliotheken von Drittanbietern sowie die Einhaltung von Codierungsstilrichtlinien und die Verwendung von Automatisierungstools. Praktische Fälle zeigen, wie man die Eigen-Bibliothek nutzt, um lineare Regressionsalgorithmen zu implementieren, den Speicher effektiv zu verwalten und leistungsstarke Matrixoperationen zu nutzen.
 Fünf Schulen des maschinellen Lernens, die Sie nicht kennen
Jun 05, 2024 pm 08:51 PM
Fünf Schulen des maschinellen Lernens, die Sie nicht kennen
Jun 05, 2024 pm 08:51 PM
Maschinelles Lernen ist ein wichtiger Zweig der künstlichen Intelligenz, der Computern die Möglichkeit gibt, aus Daten zu lernen und ihre Fähigkeiten zu verbessern, ohne explizit programmiert zu werden. Maschinelles Lernen hat ein breites Anwendungsspektrum in verschiedenen Bereichen, von der Bilderkennung und der Verarbeitung natürlicher Sprache bis hin zu Empfehlungssystemen und Betrugserkennung, und es verändert unsere Lebensweise. Im Bereich des maschinellen Lernens gibt es viele verschiedene Methoden und Theorien, von denen die fünf einflussreichsten Methoden als „Fünf Schulen des maschinellen Lernens“ bezeichnet werden. Die fünf Hauptschulen sind die symbolische Schule, die konnektionistische Schule, die evolutionäre Schule, die Bayes'sche Schule und die Analogieschule. 1. Der Symbolismus, auch Symbolismus genannt, betont die Verwendung von Symbolen zum logischen Denken und zum Ausdruck von Wissen. Diese Denkrichtung glaubt, dass Lernen ein Prozess der umgekehrten Schlussfolgerung durch das Vorhandene ist
 Erklärbare KI: Erklären komplexer KI/ML-Modelle
Jun 03, 2024 pm 10:08 PM
Erklärbare KI: Erklären komplexer KI/ML-Modelle
Jun 03, 2024 pm 10:08 PM
Übersetzer |. Rezensiert von Li Rui |. Chonglou Modelle für künstliche Intelligenz (KI) und maschinelles Lernen (ML) werden heutzutage immer komplexer, und die von diesen Modellen erzeugten Ergebnisse sind eine Blackbox, die den Stakeholdern nicht erklärt werden kann. Explainable AI (XAI) zielt darauf ab, dieses Problem zu lösen, indem es Stakeholdern ermöglicht, die Funktionsweise dieser Modelle zu verstehen, sicherzustellen, dass sie verstehen, wie diese Modelle tatsächlich Entscheidungen treffen, und Transparenz in KI-Systemen, Vertrauen und Verantwortlichkeit zur Lösung dieses Problems gewährleistet. In diesem Artikel werden verschiedene Techniken der erklärbaren künstlichen Intelligenz (XAI) untersucht, um ihre zugrunde liegenden Prinzipien zu veranschaulichen. Mehrere Gründe, warum erklärbare KI von entscheidender Bedeutung ist. Vertrauen und Transparenz: Damit KI-Systeme allgemein akzeptiert und vertrauenswürdig sind, müssen Benutzer verstehen, wie Entscheidungen getroffen werden
