
 Technologie-Peripheriegeräte
KI
Eine ausführliche Analyse der Spurwechselstrategie von Apollo und ihrer praktischen Anwendung
Technologie-Peripheriegeräte
KI
Eine ausführliche Analyse der Spurwechselstrategie von Apollo und ihrer praktischen Anwendung
Eine ausführliche Analyse der Spurwechselstrategie von Apollo und ihrer praktischen Anwendung

1. Einführung
1.1. Die Funktion des Spurwechsels
Einfach ausgedrückt besteht die Funktion des Spurwechsels darin, eine der Referenzlinien auszuwählen, die von den nachfolgenden Planungsmodulen verwendet werden sollen.
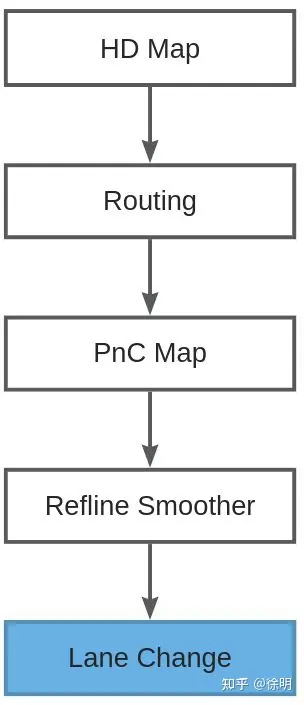
Es ist zu beachten, dass der von Apollo als Open-Source-Code bereitgestellte Spurwechselcode stark reduziert wurde, sodass nur noch ein einfaches Framework übrig bleibt. Viele Funktionen wie aktiver Spurwechsel, passiver Spurwechsel (aufgrund von Hindernissen), relativ vollständige Zustandsmaschine, Spurwechselfenster und Lückenauswahl usw. fehlen. Dieser technische Artikel zeigt nur Inhalte zum bestehenden Framework. Was den Inhalt anderer Spurwechselfunktionen betrifft, freuen Sie sich bitte auf die folgenden Artikel Die Zustandsmaschine:
Die IN_CHANGE_LANE umfasst hier sowohl die Spurwechsel-Ausführung als auch die Spurwechsel-Vorbereitungsphase. Unter normalen Umständen sollte Apollo die Methode des Wechselns der Referenzlinie und dann der Ausführung der Spurwechselaktion verwenden wird auch die Methode übernehmen, bei der zuerst der Spurwechsel ausgeführt wird. Die Aktion besteht in der Methode zum Wechseln der Referenzlinie (der Vorteil besteht darin, dass der seitliche Abstand des eigenen Fahrzeugs am Rahmen beim Wechseln der Referenzlinie nahe bei 0 liegt). .
Der aktuelle Code spiegelt nicht wider, wann der Spurwechsel fehlschlägt. Es besteht auch Grund zu der Annahme, dass dies auf das Löschen des entsprechenden Codes zurückzuführen ist.Der vollständige Spurwechselstatus sollte mindestens Folgendes umfassen: Spurwechselvorbereitung, Spur Änderungsausführung, Spurwechselwartung, Spurwechselstornierung, Spurwechselabschluss und andere Status.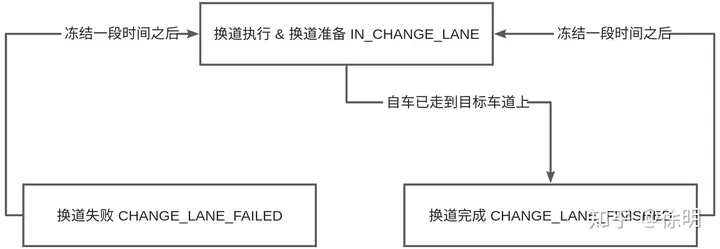
2. Code-Analyse
- 2.1. Relevanter Codepfad: Module/Planung/Aufgaben/Entscheider/Spurwechsel-Entscheider /http://lane_change_decider.cc
- Verarbeitung
reference_line_infoist eine leere Ausnahme.reference_line_info为空的异常情况. - 如果配置了强制换道
reckless_change_lane为true, 则直接更新 Reference Line. - 获取上一帧的换道状态
prev_status, 刚进入程序时, 可能prev_status没有状态信息(!prev_status->has_status()), 此时直接认为处于换道完成状态. - 如果
reference_line_info的数量为 1(即has_change_lane为false), 说明自车处在巡迹状态, 自车当前所在的车道拥有唯一的车道线, 周围没有可变车道, 所以直接更新换道状态即可. - 切换换道的状态机
- 上一帧处在换道状态
ChangeLaneStatus::IN_CHANGE_LANE: 如果上一帧自车所在的 Lane 和这一帧所在的 Lane 相同, 说明自车还在往目标车道上走. 反之如果上一帧自车所在的 Lane 和这一帧所在的 Lane 不同, 说明自车已经在目标车道上了, 切换已经完成. - 上一帧处在换道失败状态
ChangeLaneStatus::CHANGE_LANE_FAILED: 如果换道失败, 则冻结状态一段时间, 然后切换到正在换道状态, 为下一次换道做准备. - 上一帧处在换道完成状态
ChangeLaneStatus::CHANGE_LANE_FINISHED: 换道成功后同样冻结一段时间, 然后切换到正在换道状态, 为下一次换道做准备. 这里冻结时间是为了避免频繁换道.
2.2. 安全检查
IsClearToChangeLane
reckless_change_lane ist true, dann aktualisieren Sie direkt die Referenzzeile Status ändernprev_status, wenn Sie das Programm zum ersten Mal aufrufen, ist es möglicherweise prev_status hat keine Statusinformationen (!prev_status->has_status()), zu diesem Zeitpunkt ist es direkt Es wird davon ausgegangen, dass der Spurwechsel abgeschlossen ist. indent: 0px; display: inline- Die Anzahl der Blöcke;">reference_line_info ist 1 (d. h. has_change_lane ist false), was darauf hinweist, dass sich das Fahrzeug im Patrouillenzustand befindet, und Die Fahrspur, auf der sich das Fahrzeug gerade befindet, hat die einzige Fahrspurlinie, es gibt keine variablen Fahrspuren, also aktualisieren Sie einfach den Spurwechselstatus-Automaten. - Der vorherige Frame befand sich im Zustand „Spurwechselfehler“
ChangeLaneStatus::CHANGE_LANE_FAILED: Wenn der Spurwechsel fehlschlägt, wird der Status für einen bestimmten Zeitraum eingefroren und dann in den Spurwechselstatus gewechselt . Bereiten Sie sich auf den nächsten Spurwechsel vor.
ChangeLaneStatus::IN_CHANGE_LANE: Wenn oben: Wenn die Spur, auf der sich das Fahrzeug in einem Frame befindet, mit der Spur übereinstimmt, auf der es sich in diesem Frame befindet, bedeutet dies, dass das Fahrzeug immer noch in Richtung fährt Wenn sich die Spur, auf der sich das Fahrzeug im vorherigen Frame befindet, von der Spur unterscheidet, auf der sich das Fahrzeug in diesem Frame befindet, bedeutet dies, dass sich das Fahrzeug bereits auf der Zielspur bewegt hat wurde abgeschlossen. Der vorherige Frame befindet sich im Status „Spurwechsel abgeschlossen“ChangeLaneStatus::CHANGE_LANE_FINISHED: Nachdem der Spurwechsel erfolgreich war, wird er für eine gewisse Zeit eingefroren und dann gewechselt Bereiten Sie sich auf den Spurwechsel vor, um häufige Spurwechsel zu vermeiden p>IsClearToChangeLane bestimmt, ob der Spurwechsel sicher ist.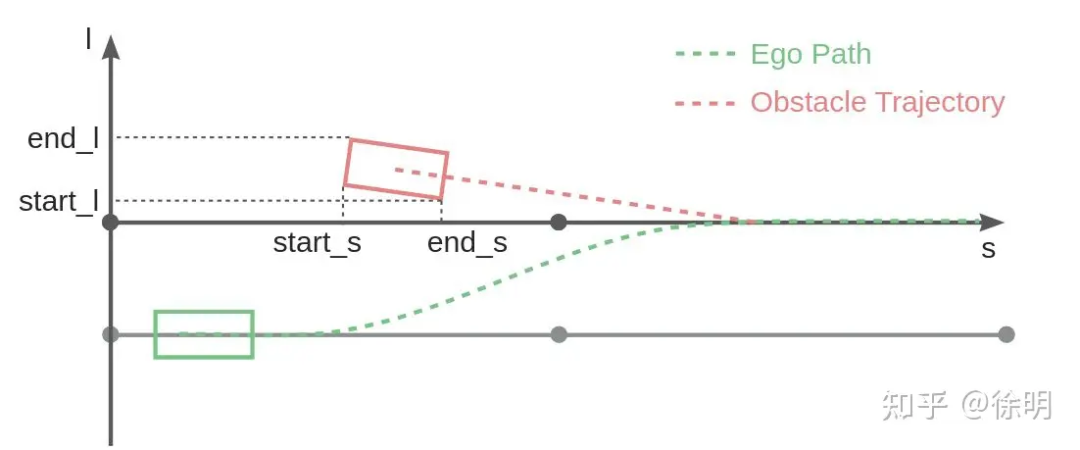
- Wenn Ihr Auto die Spur wechselt
IsChangeLanePath, verwenden Sie die oben berechnete Projektionsbeziehung, um außerhalb der Spur der Zielreferenzlinie zu ignorieren Hindernisse.IsChangeLanePath, 利用上面计算的投影关系来忽略目标参考线的车道之外的障碍物. - 判断障碍物的行驶方向是否和自车相同
same_direction. 根据障碍物与自车的行驶方向的关系和速度关系分别计算前向安全距离和后向安全距离. - 如果自车和障碍物之间的距离大于上面计算的安全距离, 则认为可以安全换道的.
HysteresisFilter是一种 Open Close 逻辑, 目的是增加安全判断结果的稳定性(上一帧判断结果认为是安全的, 那么这一帧就更倾向于给出是安全的判断, 反之亦然).
2.3. 更新 Reference Line
需要重写的内容是:LaneChangeDecider::PrioritizeChangeLane
- 输入:
<span> </span>is_prioritize_change_lane. 如果is_prioritize_change_lane为true, 则找自车要切换的目标参考线. 反之如果is_prioritize_change_lane为false, 则找自车当前位置所在的 Lane 所在的参考线. -
reference_line_info->splice(reference_line_info->begin(),*reference_line_info, iter);将步骤 1 找到的iter所指向的参考线放在链表的最前面. 由于 Planning 后续模块使用的都是reference_line_info().front(), 所以链表的最前面就表示当帧就是使用的参考线.splice的使用详细说明见C++ 基础. - 输出:
ReferenceLineInfo Bestimmen Sie, ob sich das Hindernis in die gleiche Richtung wie das Fahrzeug bewegt
same_direction. Berechnen Sie separat entsprechend der Beziehung zwischen dem Hindernis und der Fahrtrichtung und Geschwindigkeit Sicherheitsabstand nach vorne und Sicherheitsabstand nach hinten.Wenn der Abstand zwischen dem Fahrzeug und dem Hindernis größer als der oben berechnete Sicherheitsabstand ist, gilt dies als sicher ändern. Taoist. HysteresisFilter ist eine Art Open-Close-Logik, deren Zweck darin besteht, die Stabilität des Sicherheitsbeurteilungsergebnisses zu erhöhen (das Beurteilungsergebnis des vorherigen Frames gilt dann als sicher). Dieser Rahmen ist eher geneigt, ein sicheres Urteil abzugeben, und umgekehrt).
2.3. Referenzlinie aktualisieren
Der Inhalt, der neu geschrieben werden muss, ist: LaneChangeDecider ::PrioritizeChangeLane
<span> </span>is_prioritize_change_lane. Ifis_prioritize_change_lane ist true, dann die zu wechselnde Zielreferenzzeile . Ansonsten, wenn is_prioritize_lane ist false, dann finden Sie die Referenzlinie der Spur, auf der sich die aktuelle Position des Autos befindet.🎜🎜reference_line_info->begin(), *reference_line_info, iter) ;Ändern Sie den iterDie Referenzzeile, auf die verwiesen wird, wird am Anfang der verknüpften Liste platziert. Da die Planung nachfolgender Module verwendet, wird reference_line_info().front() , also der Anfang der verknüpften Liste. Dies bedeutet, dass der Rahmen die verwendete Referenzlinie ist. splice Detaillierte Anweisungen finden Sie unter C++-Grundlagen.🎜🎜Ausgabe: > ReferenceLineInfo verknüpfte Liste. 🎜🎜🎜🎜🎜🎜Originallink: https://mp.weixin.qq.com/s/IQkBV8iadaU4Qy70F3Xs3Q🎜Das obige ist der detaillierte Inhalt vonEine ausführliche Analyse der Spurwechselstrategie von Apollo und ihrer praktischen Anwendung. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1381
1381
 52
52

 Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Oben geschrieben und persönliches Verständnis des Autors. Dreidimensionales Gaussplatting (3DGS) ist eine transformative Technologie, die in den letzten Jahren in den Bereichen explizite Strahlungsfelder und Computergrafik entstanden ist. Diese innovative Methode zeichnet sich durch die Verwendung von Millionen von 3D-Gaußkurven aus, was sich stark von der Neural Radiation Field (NeRF)-Methode unterscheidet, die hauptsächlich ein implizites koordinatenbasiertes Modell verwendet, um räumliche Koordinaten auf Pixelwerte abzubilden. Mit seiner expliziten Szenendarstellung und differenzierbaren Rendering-Algorithmen garantiert 3DGS nicht nur Echtzeit-Rendering-Fähigkeiten, sondern führt auch ein beispielloses Maß an Kontrolle und Szenenbearbeitung ein. Dies positioniert 3DGS als potenziellen Game-Changer für die 3D-Rekonstruktion und -Darstellung der nächsten Generation. Zu diesem Zweck geben wir erstmals einen systematischen Überblick über die neuesten Entwicklungen und Anliegen im Bereich 3DGS.
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
0. Vorab geschrieben&& Persönliches Verständnis, dass autonome Fahrsysteme auf fortschrittlichen Wahrnehmungs-, Entscheidungs- und Steuerungstechnologien beruhen, indem sie verschiedene Sensoren (wie Kameras, Lidar, Radar usw.) verwenden, um die Umgebung wahrzunehmen, und Algorithmen und Modelle verwenden für Echtzeitanalysen und Entscheidungsfindung. Dies ermöglicht es Fahrzeugen, Verkehrszeichen zu erkennen, andere Fahrzeuge zu erkennen und zu verfolgen, das Verhalten von Fußgängern vorherzusagen usw. und sich so sicher an komplexe Verkehrsumgebungen anzupassen. Diese Technologie erregt derzeit große Aufmerksamkeit und gilt als wichtiger Entwicklungsbereich für die Zukunft des Transportwesens . eins. Aber was autonomes Fahren schwierig macht, ist herauszufinden, wie man dem Auto klarmachen kann, was um es herum passiert. Dies erfordert, dass der dreidimensionale Objekterkennungsalgorithmus im autonomen Fahrsystem Objekte in der Umgebung, einschließlich ihrer Standorte, genau wahrnehmen und beschreiben kann.
 Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Das Stable Diffusion 3-Papier wird endlich veröffentlicht und die architektonischen Details werden enthüllt. Wird es helfen, Sora zu reproduzieren?
Mar 06, 2024 pm 05:34 PM
Der Artikel von StableDiffusion3 ist endlich da! Dieses Modell wurde vor zwei Wochen veröffentlicht und verwendet die gleiche DiT-Architektur (DiffusionTransformer) wie Sora. Nach seiner Veröffentlichung sorgte es für großes Aufsehen. Im Vergleich zur Vorgängerversion wurde die Qualität der von StableDiffusion3 generierten Bilder erheblich verbessert. Es unterstützt jetzt Eingabeaufforderungen mit mehreren Themen, und der Textschreibeffekt wurde ebenfalls verbessert, und es werden keine verstümmelten Zeichen mehr angezeigt. StabilityAI wies darauf hin, dass es sich bei StableDiffusion3 um eine Reihe von Modellen mit Parametergrößen von 800 M bis 8 B handelt. Durch diesen Parameterbereich kann das Modell direkt auf vielen tragbaren Geräten ausgeführt werden, wodurch der Einsatz von KI deutlich reduziert wird
 Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Die Trajektorienvorhersage spielt eine wichtige Rolle beim autonomen Fahren. Unter autonomer Fahrtrajektorienvorhersage versteht man die Vorhersage der zukünftigen Fahrtrajektorie des Fahrzeugs durch die Analyse verschiedener Daten während des Fahrvorgangs. Als Kernmodul des autonomen Fahrens ist die Qualität der Trajektorienvorhersage von entscheidender Bedeutung für die nachgelagerte Planungssteuerung. Die Trajektorienvorhersageaufgabe verfügt über einen umfangreichen Technologie-Stack und erfordert Vertrautheit mit der dynamischen/statischen Wahrnehmung des autonomen Fahrens, hochpräzisen Karten, Fahrspurlinien, Fähigkeiten in der neuronalen Netzwerkarchitektur (CNN&GNN&Transformer) usw. Der Einstieg ist sehr schwierig! Viele Fans hoffen, so schnell wie möglich mit der Flugbahnvorhersage beginnen zu können und Fallstricke zu vermeiden. Heute werde ich eine Bestandsaufnahme einiger häufiger Probleme und einführender Lernmethoden für die Flugbahnvorhersage machen! Einführungsbezogenes Wissen 1. Sind die Vorschaupapiere in Ordnung? A: Schauen Sie sich zuerst die Umfrage an, S
 SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
Originaltitel: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper-Link: https://arxiv.org/pdf/2402.02519.pdf Code-Link: https://github.com/HKUST-Aerial-Robotics/SIMPL Autor: Hong Kong University of Science und Technologie DJI-Papieridee: Dieses Papier schlägt eine einfache und effiziente Bewegungsvorhersagebasislinie (SIMPL) für autonome Fahrzeuge vor. Im Vergleich zum herkömmlichen Agent-Cent
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
