

Zusammenfassung:Swarming ist eine disruptive, bahnbrechende Technologie, die den gemeinschaftlichen Einsatz mehrerer unbemannter Systeme in mehreren Bereichen (Land, Meer, Luft, Weltraum) beinhaltet. Entwicklungen in den Bereichen neue Mikroelektronik, Lenkung, Navigation, Sensoren und Technologien der künstlichen Intelligenz ermöglichen es kostengünstigen Mikrodrohnen, anspruchsvolle Missionen durchzuführen. In Kombination mit neuartigen Entscheidungsprozessen, Zielverfolgung, Kommunikationstechnologien und Algorithmen können Schwärme einen enormen Einfluss auf das Schlachtfeld haben. Es kann auch zur Bereitstellung kontinuierlicher und nicht erkennbarer Überwachungsfunktionen sowie kritischer Verteidigungsfähigkeiten wie dem Abfangen von Marschflugkörpern eingesetzt werden. Dieser Artikel beschreibt europäische Forschungsaktivitäten auf dem Gebiet des Schwärmens und geht auf die erheblichen Auswirkungen ein, die es für die Verteidigung haben kann.
Stichwörter: UAV, autonome Fähigkeiten, Zielverfolgung, Führung und Kontrolle, Sensorfusion

UAV-Schwärme bestehen aus einer Vielzahl verschiedener unbemannter Geräte. Sie verfügen über die Fähigkeiten zur Entscheidungsfindung, Zielverfolgung, Führung und Kontrolle, Sensorfusion und Steuerung und können als Gruppe intelligenter autonomer „Systeme“ operieren. Jede Fähigkeit im Bienenvolksystem kann auch unabhängig voneinander als unabhängiges intelligentes autonomes System arbeiten
Entwerfen von Drohnen mit der erforderlichen Intelligenz und autonomen Fähigkeiten durch Nutzung von Entwicklungen in den Bereichen unbemannte Ausrüstung, künstliche Intelligenz (KI), Kommunikation, Führung und Steuerung, Sensorfusion, Luft- und Raumfahrt und unbemanntes Verkehrsmanagement (UTM). Diese Drohnen können auf koordinierte Weise fliegen ein Bienenschwarm oder ein Vogelschwarm. Solche Drohnenschwärme könnten Verteidigungsunternehmen, die digitale und intelligente Technologien kombinieren, bahnbrechende Fähigkeiten bieten. Drohnenschwärme können Europa auch dabei helfen, seine Sicherheitskapazitäten zu verbessern und einen störenden Einfluss auf andere Bereiche wie den städtischen Verkehr, unbemanntes Verkehrsmanagement, autonomes Fahren und unbemannte Ausrüstung haben
Im Hinblick auf die Landesverteidigung kann der Einsatz von Drohnen das Risiko, dass Kombattanten gefährlichen Umgebungen ausgesetzt werden, erheblich verringern. Drohnen sind in der Lage, langweilige und mühsame Aufgaben wie die kontinuierliche Überwachung großer Gebiete (z. B. Mittelmeer, europäische Grenzen) zu übernehmen. Auch in zukünftigen Militärszenarien können Drohnen eingesetzt werden, um Gegner zu verwirren und zu überwältigen. Abbildung 1 zeigt das Multi-Domain-Drohnenschwarmkonzept zum Schutz und zur Überwachung hochwertiger Vermögenswerte wie Militärlager oder -anlagen, das 2016 im Rahmen des erstmals vorgeschlagenen Pilotprojekts „European Swarm“ (EUROSWARM) der Europäischen Verteidigungsagentur entwickelt wurde.
Abbildung 1: Multidomänen-Drohnenschwarmkonzept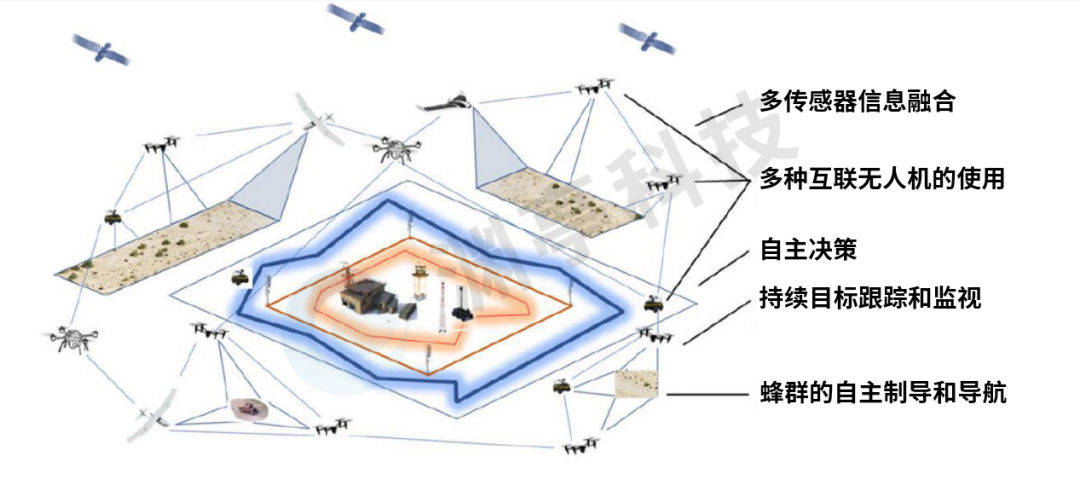
1. Wahrnehmungsfähigkeit: Die Wahrnehmungsfähigkeit ist für Drohnenschwärme von entscheidender Bedeutung. Diese Fähigkeit ermöglicht es dem Schwarm, seine Umgebung zu spüren und zu verstehen, Hindernisse zu erkennen, Ziele zu identifizieren und das Situationsbewusstsein aufrechtzuerhalten. Effektive Sensorfunktionen ermöglichen es Bienenvölkern, in komplexen dynamischen Umgebungen zu arbeiten und verschiedene komplexe Aufgaben effizient auszuführen. Technologien des maschinellen Lernens und der künstlichen Intelligenz können die Wahrnehmungsfähigkeiten verbessern. Schwärme können durch Sensorfusion ein beispielloses Situationsbewusstsein erreichen.
2. Aufgabenverteilung und Entscheidungsfindung: Aufgabenverteilung und unabhängige Entscheidungsfindung sind für Drohnenschwärme von entscheidender Bedeutung. Durch eine effiziente Aufgabenverteilung wird sichergestellt, dass jeder Drohne eine Mission zugewiesen wird, die ihren Fähigkeiten entspricht, wodurch die Nutzung der verfügbaren Ressourcen optimiert wird. Wenn eine oder mehrere Drohnen eine Fehlfunktion haben, kann der Schwarm die Lücke automatisch füllen, und die Aufgabenzuweisung hilft bei der schnellen Verbreitung von Entscheidungen, sodass sich der Schwarm schnell an veränderte Umgebungen anpassen kann. Die Aufgabenverteilung trägt auch dazu bei, die Anpassungsfähigkeit und Skalierbarkeit zu verbessern und die Entscheidungsfindung zu beschleunigen, wodurch Schwärme in dynamischen und unsicheren Umgebungen effektiver werden. Durch den nahtlosen Datenaustausch zwischen Drohnen innerhalb des Schwarms ist der Schwarm in der Lage, bessere Entscheidungen zu treffen, was die effiziente Ressourcennutzung, Stabilität, Fehlertoleranz, Anpassungsfähigkeit und Skalierbarkeit verbessert.
3. Wegplanung und Kollisionsvermeidung: Drohnenschwärme bestehen in der Regel aus einer großen Anzahl von Drohnen. Um einen effizienten und sicheren Betrieb von Drohnenschwärmen zu erreichen, sind Wegeplanung und Kollisionsvermeidungsmethoden von entscheidender Bedeutung. Der Kern der Schwarmpfadplanung besteht darin, den besten Weg für jede Drohne zu finden, um ihr Ziel zu erreichen und dabei Hindernisse zu vermeiden und den Zeit- und Energieaufwand zu minimieren. Durch die Kollisionsvermeidung wird sichergestellt, dass Drohnen nicht kollidieren, sodass jede Drohne ihre Mission erfolgreich abschließen kann. Beispielsweise kann bei Überwachungsmissionen die Flugbahnplanung die Aktionsroute der Drohne optimieren, um überlappende Bereiche zu minimieren und die Abdeckung zu erhöhen. Derzeit gibt es eine Vielzahl von Techniken zur Pfadplanung und Kollisionsvermeidung, darunter zentralisierte Methoden und dezentrale Methoden. Der zentralisierte Ansatz umfasst die Planung einzelner Drohnen und die Koordination der Flugwege aller Drohnen im Schwarm. Beim dezentralen Ansatz trifft jede Drohne ihre eigenen Entscheidungen zur Flugbahnplanung auf der Grundlage lokaler Informationen.
4. Kommunikation: Ein Schwarm funktioniert optimal, wenn die Kommunikation zwischen Drohnen innerhalb des Schwarms offen und ohne Verzögerungen bleibt. Durch Sensorfusion können Schwärme hochdeterministische und hochauflösende Informationen liefern. Effektive Kommunikationsprotokolle ermöglichen es Drohnen, Informationen wie Standort, Status und Aufgabenzuweisungen auszutauschen, während das Routing dafür verantwortlich ist, den besten Weg für die Informationsverbreitung zwischen Drohnen zu finden. Dadurch können Schwärme in Echtzeit zusammenarbeiten, Aktionen koordinieren und Informationen austauschen. Derzeit gibt es verschiedene Technologien, die Kommunikationsprotokolle und Routing implementieren können, z. B. Ad-hoc-Netzwerktechnologie, Mesh-Netzwerktechnologie und Multi-Hop-Routing-Technologie. Ad-hoc-Netzwerke ermöglichen es Drohnen, direkt miteinander zu kommunizieren, ohne dass eine feste Infrastruktur erforderlich ist. Mesh-Netzwerke hingegen nutzen Drohnen, um ein Netzwerk mit redundanten Kommunikationswegen zu bilden. Multi-Hop-Routing kann die Relaisübertragung von Informationen zwischen Drohnen realisieren und so eine Kommunikation über größere Entfernungen erreichen.
Das Kommunikationsprotokoll des Drohnenschwarms kann je nach Missionsanforderungen und Schwarmeigenschaften angepasst werden, um einen Informationsaustausch zu erreichen. Derzeit gibt es drei Hauptarchitekturansätze für den Entwurf militärischer Drohnenschwärme:
1. Zentralisierte Architektur: Bei diesem Ansatz werden die Operationen aller Drohnen innerhalb des Schwarms von einer zentralen Kontrolleinheit, beispielsweise einer Bodenkontrollstation, koordiniert. Die zentrale Kontrollinstanz ist in der Lage, mit dem Schwarm zu kommunizieren und Daten zu sammeln, die Daten zu verarbeiten und Entscheidungen zu treffen. Diese Methode eignet sich für kleine Kolonien und einfache Aufgaben.
2. Dezentrale Architektur: Bei diesem Ansatz gibt es keine zentrale Kontrolleinheit und jede Drohne im Schwarm kann unabhängig agieren, Entscheidungen auf der Grundlage lokaler Informationen treffen und mit anderen Drohnen kommunizieren. Dieser Ansatz eignet sich für groß angelegte Schwarmmissionen und andere hochkomplexe Aufgaben.
3.Hybride Architektur:Dieser Ansatz vereint die Vorteile zentraler und dezentraler Architekturen. Bei diesem Ansatz gibt es eine zentrale Steuereinheit, die den Drohnen eine umfassende Navigation ermöglicht, während jede Drohne mit autonomen Entscheidungsfähigkeiten ausgestattet ist.
UAV-Schwärme werden häufig im militärischen Bereich eingesetzt und können vielfältige Aufgaben übernehmen. Hier sind einige wichtige Beispiele für Arten autonomer Schwarmoperationen:
1. Flächendeckung: Bei Flächendeckungseinsätzen besteht die Aufgabe des Schwarms darin, ein bestimmtes Gebiet mithilfe von mit Drohnen ausgestatteten Sensoren zu scannen. In den meisten Fällen liegt die ideale Flächenabdeckung bei 100 % und die Drohne muss das Gebiet vollständig abscannen. Das Abdecken eines Gebiets mit mehreren Drohnen kann zu einigen Problemen führen. Zu den üblichen Methoden zur Bewältigung dieser Probleme gehört die Verwendung von Zerlegungstechniken, um das Fokusgebiet in eine Reihe von Untergebieten zu unterteilen, und der Einsatz einer Drohne in jedem Untergebiet. Bei Schwärmen mit unterschiedlichen Drohnentypen müssen bei der Flächenzerlegung die Reichweite des Sensors, die Manövrierfähigkeit der Drohnen und die Reichweite berücksichtigt werden, um die Effizienz des Systems zu verbessern. Nachdem jeder Drohne ein Teilgebiet zugewiesen wurde, müssen diese Drohnen ihre Wege innerhalb ihres jeweiligen Gebiets selbstständig planen. Zu den Planungsmethoden für den Abdeckungspfad gehören die 2D-, 3D- und Multi-Drohnen-Bereichsabdeckung.
2. Umfassende und nachhaltige Gebietsabdeckung: Umfassende und nachhaltige Gebietsabdeckung erfordert den Einsatz von Drohnenschwärmen und deren Fähigkeit, während der gesamten Mission eine Sensorabdeckung in einem bestimmten Gebiet bereitzustellen. Die Drohnen innerhalb des Schwarms sollten basierend auf der Position ihrer Sensoren und möglichen Umgebungsmerkmalen (z. B. Hindernissen oder Verdeckungsbereichen) eine Formation bilden. UAVs innerhalb des Schwarms werden statisch oder dynamisch eingesetzt, je nachdem, wie sich regionale Merkmale oder Überwachungsgebiete im Laufe der Zeit entwickeln. Der Hauptzweck besteht darin, ein Formationsmuster zu entwerfen, das mit einer minimalen Anzahl von Drohnen eine vollständige statische Abdeckung erreicht.
3. Gebietssuche: Bei Gebietssucheinsätzen besteht die Aufgabe des Drohnenschwarms in der Regel darin, in Schlüsselgebieten nach bestimmten Zielen zu suchen. Bei diesem Vorgang ist keine vollständige Abdeckung des Bereichs erforderlich. Der Schwarm muss in kürzester Zeit Ziele in der Umgebung identifizieren. Die Drohnen im Schwarm müssen während der gesamten Mission zusammenarbeiten und mithilfe von Online-Entscheidungs- und Wegplanungstechniken die Leistung des Systems basierend auf ihrer eigenen Wahrnehmung der Umgebung und dem Verhalten anderer Drohnen verbessern. Mithilfe eines Schwarmgebietssuchalgorithmus kann die Wahrscheinlichkeit einer Zielverteilung vorhergesagt werden. Bionische Schwarmalgorithmen haben auch bei Flächensuchoperationen wissenschaftliches Interesse geweckt.
4. Bereichsüberwachung: Der Bereichsüberwachungsbetrieb erfordert, dass der Schwarm ein bestimmtes Gebiet kontinuierlich überwacht. Die Gebietsüberwachung wird typischerweise für Patrouillen, Überwachung, Erkennung neu auftretender oder dynamischer Bedrohungen und Grenzsicherung eingesetzt. Durch diese Maßnahme soll die Zeitspanne zwischen zwei langen Überwachungszeiträumen minimiert werden.
5. Zielverfolgung: Normale Zielverfolgungsoperationen umfassen ein Ziel und eine Drohne. Die Verfolgungsreichweite der Drohne basiert auf einer Online-Pfadplanung auf der Grundlage ihrer Sensordaten und Schätzungen des Standorts des Ziels sowie in einigen Fällen des vorhergesagten Verhaltens oder des zukünftigen Standorts des Ziels. Die Drohne muss selbstständig navigieren, damit sie ihrem Ziel immer folgt. Mit der Einführung von Schwarmfähigkeiten können Zielverfolgungsaufgaben von mehreren Drohnen erledigt werden, die einzelne oder mehrere Ziele verfolgen können.
Das Design militärischer Drohnenschwärme erfordert eine umfassende Berücksichtigung mehrerer Faktoren, darunter Missionsanforderungen, Schwarmgröße, Kommunikationsfähigkeiten und Rechenressourcen
1. UAV-System mit geringer Beobachtbarkeit – „LOTUS“
Das „Lotus“-Projekt ist ein Projekt des European Defence Industrial Development Programme (EDIDP), das aus 9 Unternehmen aus Griechenland und Zypern sowie weiteren 2 Unternehmen aus Spanien und den Niederlanden besteht. Das von Intracom Defence geleitete Projekt wurde im Dezember 2020 gestartet und wird 45 Monate dauern. Das Lotus-Projektteam hat ein fortschrittliches unbemanntes Flugsystem für taktische Luftaufklärungs- und Überwachungsmissionen entwickelt. Das UAV verfügt über mehrere Schlüsselfunktionen, darunter Stealth-Fähigkeiten, Distanzkampffähigkeiten, Lufttüchtigkeit, Interoperabilität auf der Grundlage von NATO-Standards und zuverlässige Kommunikation unter Berücksichtigung der Netzwerksicherheit. Darüber hinaus nutzt das System in großem Umfang Technologien der künstlichen Intelligenz, um sicherzustellen, dass es komplexe Aufgaben präzise ausführen kann. Das vom Projektteam entworfene UAV-Mutterschiff ist mit mehreren Infrarotsensoren ausgestattet, weist eine geringe Beobachtbarkeit und eine lange Lebensdauer auf und ist außerdem mit einem Selbstverteidigungssystem zur Bewältigung feindlicher Bedrohungen ausgestattet. Der UAV-Träger kann vier rohrgestützte Faltflügel-UAVs mit erweiterten autonomen Fähigkeiten und der Fähigkeit zur Durchführung komplexer ISR-Missionen einsetzen. Das Drohnen-Mutterschiff und die Drohnen bilden zusammen einen leistungsstarken Drohnenschwarm, der eine verzögerungsfreie Zusammenarbeit erreichen und den Entscheidungsträgern vor Ort wichtige Informationen und Überwachungsdaten liefern kann. In Abbildung 2 werden die Aufklärungsaufgaben (links) und die kollaborative Abdeckung (rechts) von Bodenzielen durch einen Schwarmalgorithmus durchgeführt, der an der Universität Patras entwickelt wurde.
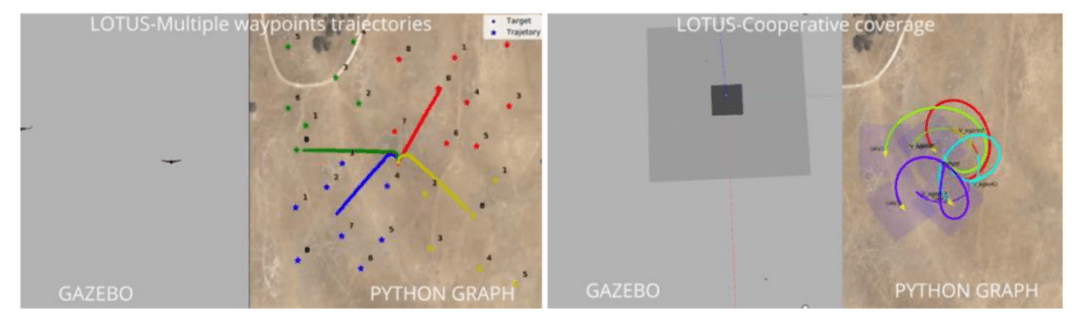 Abbildung 2: Beispiel einer Drohnenschwarmaktion im Projekt „Lotus“
Abbildung 2: Beispiel einer Drohnenschwarmaktion im Projekt „Lotus“
2. Autonomer, rekonfigurierbarer Drohnenschwarm für Verteidigungsanwendungen – „ACHILLES“. Umgeschriebener Inhalt: ACHILLES ist ein autonomer, rekonfigurierbarer Drohnenschwarm für Verteidigungsanwendungen
Projekt „Achilles“ ist ein Projekt der Europäischen Verteidigungsagentur, das in Zusammenarbeit zwischen griechischen und deutschen Unternehmen und Universitäten durchgeführt wird. Das Projekt wurde im Januar 2023 gestartet und wird von der Universität Patras geleitet. Zu den am Projekt beteiligten Unternehmen und Schulen gehören ATOS, DroniQ, Scytalvs, Intracom Defense, die Universität Patras, die Fachhochschule Ingolstadt und die Universität Athen. Dieses Projekt zielt darauf ab, die Entwicklung und den Einsatz von Drohnenschwärmen im Verteidigungssektor zu fördern, indem die TRL autonomer, rekonfigurierbarer Drohnenschwärme für bestimmte Verteidigungsmissionen erhöht wird, und Drohnenschwärme für kontinuierliche Überwachungsfähigkeiten und Kampfbereitschaftsniveaus zu demonstrieren. Das Projektteam entdeckte vielfältige Vorteile und Einsatzmöglichkeiten von Drohnenschwärmen und nutzte diese als Inspiration für die Förderung des Achilles-Projekts. Jüngste technologische Fortschritte ermöglichen es Drohnen, automatisch kritische Daten zu erfassen, um das Situationsbewusstsein zu verbessern. Skalierbare autonome und rekonfigurierbare Drohnenschwärme verfügen über hochwirksame regionale Koordinationsfähigkeiten und eine starke Anpassungsfähigkeit an verschiedene Ereignisse. Zu den Ergebnissen und Innovationen des Projekts werden voraussichtlich neue Drohnenschwarmfähigkeiten und -methoden gehören, um die sichere und effektive Integration von Drohnen in den militärischen und zivilen Luftraum zu ermöglichen. Diese Fähigkeiten werden die Reifung und Validierung drohnenschwarmbasierter Systeme und Technologien unterstützen.
3. Bemannte-unbemannte Begleitoperationen – Projekt „COMMANDS“. Umgeschriebener Inhalt: 3. Begleitoperationen bemannter und unbemannter Systeme – „BEFEHLE“
Das „Command“-Projekt ist ein Projekt des Europäischen Verteidigungsfonds (EDF), an dem 21 Unternehmen aus 10 Ländern beteiligt sind. Das im Dezember 2022 gestartete, auf drei Jahre angelegte Projekt wird von Sener Aerospace geleitet und von den Verteidigungsministerien von sieben Ländern unterstützt. Die Verteidigungsministerien dieser Länder stellen dem Projekt auch grundlegende Anforderungen für die Projektentwicklung zur Verfügung. Ziel des Projekts ist die Entwicklung agiler, intelligenter und kollaborativer bemannter und unbemannter Systemlebenszyklusfähigkeiten (TLC). Das Projekt wird mehrere modulare Systeme umfassen, die Schwarmfähigkeiten durch nahtlose funktionale Dienste und Datenaustausch ermöglichen. Das System wird aus bemannten und unbemannten Bodenfahrzeugen und Drohnen bestehen. Um Projektrisiken zu reduzieren, nutzt das Projekt eine Vielzahl von Technologien, um einen selbsttragenden EU-Verteidigungs-TLC-Nachhaltigkeitsfahrplan zu entwickeln. Letztendlich wird das Projekt bestehende Bodenfahrzeuge aufrüsten und in zukünftige Fahrzeuge integrieren. Das Projekt plant, die Technologie durch Technologiedemonstratoren zu validieren, die in Labors und mobilen Demonstratoren in realen Szenarien durchgeführt werden, wobei der Schwerpunkt auf der Bereitstellung bewaffneter Eskorten für Konvois liegt, die Nachschub auf der „letzten Meile“ durchführen
Swarm-Technologie ermöglicht es, eine große Anzahl von Drohnen hochgradig miteinander zu verbinden, Missionsziele effektiv zu planen und zuzuweisen, koordinierte taktische Entscheidungen zu treffen und gemeinsam mit minimaler Aufsicht auf dynamische Umgebungen zu reagieren und gleichzeitig Empfehlungen an die Bediener zu geben. Mit zunehmender Reife der Schwarmtechnologie entwickeln sich auch ihre Anwendungen im militärischen Bereich. Viele glauben, dass die Entwicklung von Schwärmen mit der Entwicklung von Präzisionswaffen verglichen werden kann. Präzisionswaffen wurden in den 1970er und 1980er Jahren getestet und verfeinert, kamen aber erst im ersten Golfkrieg Anfang der 1990er Jahre auf den Markt. Der Einsatz von Schwärmen könnte bemannte Verteidigungssysteme, die derzeit für Überwachungs- und Angriffsmissionen in geringer und mittlerer Höhe eingesetzt werden, überflüssig machen. In den kommenden Jahrzehnten werden ferngesteuerte einzelne unbemannte Geräte wie Drohnen obsolet werden, da unbemannte Flugsysteme in der Luft, am Boden und auf See in der Lage sein werden, mehrere Drohnen einzusetzen, um in Schwärmen zu kämpfen. Dies erweitert die Kampf- und Überwachungsreichweite und verbessert die ISTAR-Fähigkeiten und Angriffsfähigkeiten des UAV für die Durchführung verschiedener Missionen.
Die multinationalen Verteidigungsministerien der NATO haben ihre Absicht angekündigt, die Schwarmtechnologie in bestehende Waffensysteme wie F-35-Kampfflugzeuge, British Storm-Kampfflugzeuge der nächsten Generation und FCAS-Flugzeuge/unbemannte Flugsysteme zu integrieren. Es ist klar, dass die Schwarmtechnologie weltweit in militärische Fähigkeiten integriert wird und sich allmählich auf die Verteidigungsfähigkeiten der Länder auswirkt. Schwärme sind eine militärische Schlüsseltechnologie, die die Entwicklung mehrerer Technologiebereiche unmittelbar erleichtern wird. Diese Technologie kann beispielsweise die Technologie der künstlichen Intelligenz eingebetteter Schwärme und autonomer Systeme optimieren und so die Sicherheit, Effizienz und Effektivität kollaborativer Operationen von Verteidigungssystemen, die in unstrukturierten, sich schnell ändernden, eingeschränkten und konfrontativen Umgebungen operieren, wirksam verbessern. Wie der Krieg zwischen Russland und der Ukraine und die Konflikte im Nahen Osten zeigen, verändert die Schwarmtechnologie die Kriegsführung durch den Einsatz von Drohnenschwärmen und herumlungernder Munition. Die Entwicklung autonomer Schwarmsysteme ist daher für Europas Verteidigung, Sicherheit und Wohlstand von entscheidender Bedeutung.
Das obige ist der detaillierte Inhalt vonDrohnenschwärme: Eine bahnbrechende Technologie für Verteidigungsanwendungen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
















![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



