
 Technologie-Peripheriegeräte
KI
Erweiterte Fahrsimulation: Fahrszenenrekonstruktion mit realistischen Umgebungsdaten
Technologie-Peripheriegeräte
KI
Erweiterte Fahrsimulation: Fahrszenenrekonstruktion mit realistischen Umgebungsdaten
Erweiterte Fahrsimulation: Fahrszenenrekonstruktion mit realistischen Umgebungsdaten

Originaltitel: DrivingGaussian: Zusammengesetztes Gaußsches Punktrendering für umgebungsdynamische autonome Fahrszenen
Bitte klicken Sie hier, um das Papier anzuzeigen: https://arxiv.org/pdf/2312.07920.pdf
Code-Link: https://pkuvdig . github.io/DrivingGaussian/
Autorenzugehörigkeit: Peking University Google Research University of California, Merced
Idee für die Abschlussarbeit:
Dieses Papier schlägt DrivingGaussian vor, eine hocheffiziente und kostengünstige Lösung für dynamische autonome Fahrszenarien . rahmen. Für komplexe Szenen mit sich bewegenden Objekten verwendet dieser Artikel zunächst inkrementelle statische 3D-Gauß-Funktionen, um den statischen Hintergrund der gesamten Szene sequentiell und schrittweise zu modellieren. Anschließend verwendet dieser Artikel einen zusammengesetzten dynamischen Gaußschen Graphen, um mehrere sich bewegende Objekte zu verarbeiten, jedes Objekt einzeln zu rekonstruieren und ihre genaue Position und Okklusionsbeziehung in der Szene wiederherzustellen. In diesem Artikel werden außerdem LiDAR-Prioritäten für Gaußsches Splatting verwendet, um die Szene mit mehr Details zu rekonstruieren und die Panoramakonsistenz beizubehalten. DrivingGaussian übertrifft bestehende Methoden zur Rekonstruktion von Fahrszenen und ermöglicht eine realistische Surround-View-Synthese mit hoher Wiedergabetreue und Multikamera-Konsistenz.
Hauptbeiträge:
Laut diesem Artikel ist DrivingGaussian das erste Framework, das die zusammengesetzte Gaußsche Splash-Technologie für die Darstellung und Modellierung dynamischer Fahrszenen in großem Maßstab verwendet.
Führt zwei neuartige Module ein, darunter inkrementelles statisches 3D-Gaußsches und zusammengesetztes dynamisches Modul Gaußsche Diagramme. Ersteres rekonstruiert inkrementell einen statischen Hintergrund, während letzteres mehrere dynamische Objekte mithilfe von Gaußschen Karten modelliert. Mithilfe von Lidar-Prioritäten hilft die Methode dabei, die vollständige Geometrie in groß angelegten Fahrszenarien wiederherzustellen.
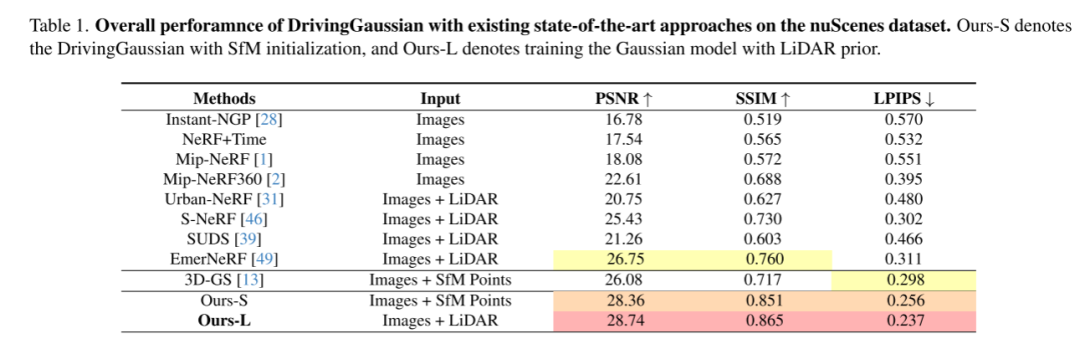
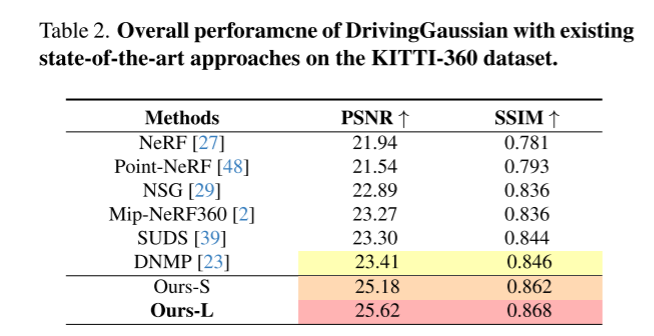
Umfassende Experimente zeigen, dass DrivingGaussian frühere Methoden bei anspruchsvollen Benchmarks für autonomes Fahren übertrifft und in der Lage ist, verschiedene Extremsituationen für nachgelagerte Aufgaben zu simulieren.
Netzwerkdesign:
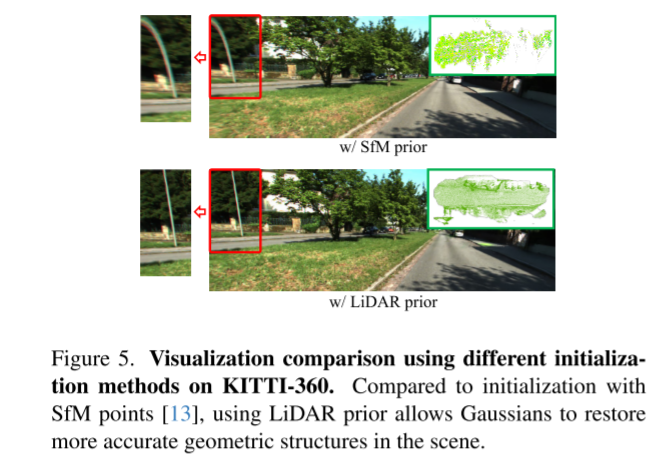
In diesem Artikel wird ein neues Framework namens DrivingGaussian zur Darstellung dynamischer autonomer Fahrszenarien mit Rundumsicht vorgestellt. Die Kernidee dieses Frameworks besteht darin, komplexe Fahrszenarien mithilfe sequenzieller Daten mehrerer Sensoren hierarchisch zu modellieren. Mithilfe der Composite Gaussian Splatting-Technologie wird die gesamte Szene in statische Hintergründe und dynamische Objekte zerlegt und jeder Teil separat rekonstruiert. Konkret wird zunächst eine synthetische Szene sequentiell aus umherblickenden Ansichten mehrerer Kameras unter Verwendung einer inkrementellen statischen 3D-Gauß-Methode erstellt. Anschließend wird eine zusammengesetzte dynamische Gaußsche Karte verwendet, um jedes sich bewegende Objekt einzeln zu rekonstruieren und sie durch die Gaußsche Karte dynamisch in den statischen Hintergrund zu integrieren. Auf dieser Grundlage wird ein globales Rendering durch Gaußsches Splatting durchgeführt, um Okklusionsbeziehungen in der realen Welt, einschließlich statischer Hintergründe und dynamischer Objekte, zu erfassen. Darüber hinaus wird in diesem Artikel auch ein LiDAR vor der GS-Darstellung eingeführt, das in der Lage ist, genauere Geometrien wiederherzustellen und eine bessere Konsistenz mehrerer Ansichten im Vergleich zu Punktwolken aufrechtzuerhalten, die durch zufällige Initialisierung oder SfM generiert wurden
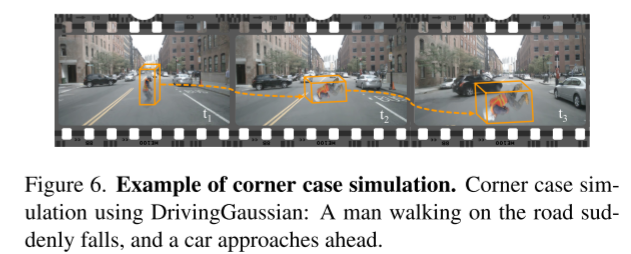
Eine große Anzahl von Experimenten zeigt, dass Unsere Methode erreicht Spitzenleistungen bei öffentlichen Datensätzen zum autonomen Fahren. Auch ohne vorheriges Lidar zeigt unsere Methode immer noch eine gute Leistung und demonstriert ihre Vielseitigkeit bei der Rekonstruktion großer dynamischer Szenen. Darüber hinaus unterstützt das Framework dieses Artikels die dynamische Szenenkonstruktion und Eckfallsimulation, was dabei hilft, die Sicherheit und Robustheit des autonomen Fahrsystems zu überprüfen.
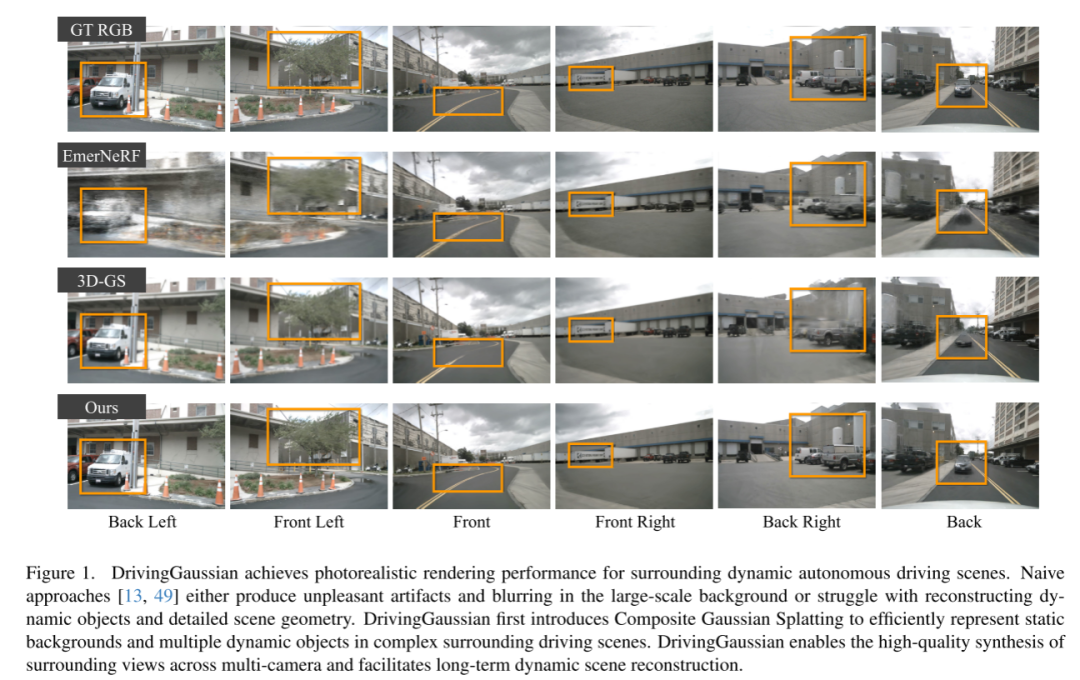
Abbildung 1. DrivingGaussian erreicht eine realistische Renderleistung dynamischer autonomer Fahrszenen mit Rundumsicht. Naive Methoden [13, 49] erzeugen entweder unangenehme Artefakte und Unschärfen in großflächigen Hintergründen oder haben Schwierigkeiten bei der Rekonstruktion dynamischer Objekte und detaillierter Szenengeometrie. DrivingGaussian führte erstmals Composite Gaussian Splatting ein, um statische Hintergründe und mehrere dynamische Objekte in komplexen Fahrszenen mit Rundumsicht effektiv darzustellen. DrivingGaussian ermöglicht eine hochwertige Synthese von Surround-Ansichten über mehrere Kameras hinweg und erleichtert die langfristige dynamische Szenenrekonstruktion.
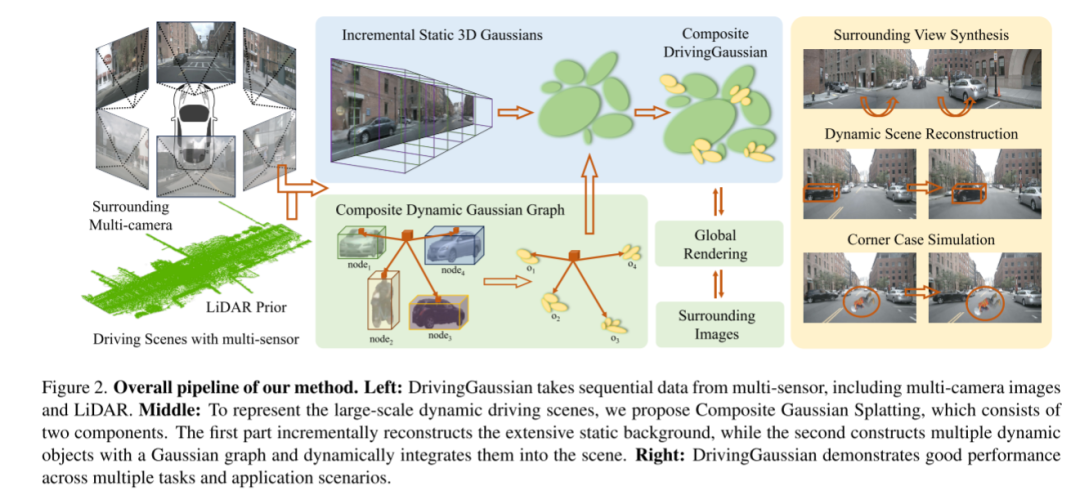
Abbildung 2. Der Gesamtprozess der Methode in diesem Artikel. Links: DrivingGaussian erfasst kontinuierlich Daten von mehreren Sensoren, einschließlich Bildern mehrerer Kameras und LiDAR. Mitte: Zur Darstellung großräumiger dynamischer Fahrszenarien wird in diesem Artikel das Composite Gaussian Splatting vorgeschlagen, das aus zwei Teilen besteht. Der erste Teil rekonstruiert schrittweise einen breiten statischen Hintergrund, während der zweite Teil Gaußsche Karten verwendet, um mehrere dynamische Objekte zu konstruieren und sie dynamisch in die Szene zu integrieren. Rechts: DrivingGaussian zeigt eine gute Leistung bei mehreren Aufgaben und Anwendungsszenarien.
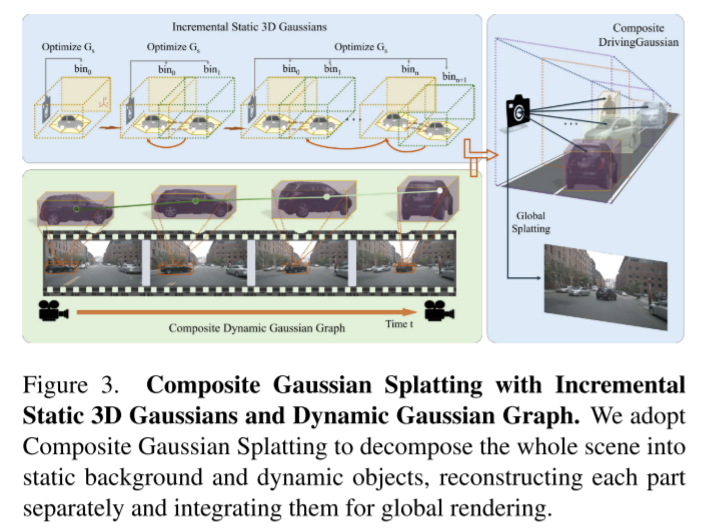
Abbildung 3. Zusammengesetztes Gaußsches Splatting mit inkrementellen statischen 3D-Gaußschen und dynamischen Gaußschen Diagrammen. Dieser Artikel verwendet Composite Gaußian Splatting, um die gesamte Szene in statische Hintergründe und dynamische Objekte zu zerlegen, jeden Teil separat zu rekonstruieren und sie für das globale Rendering zu integrieren.
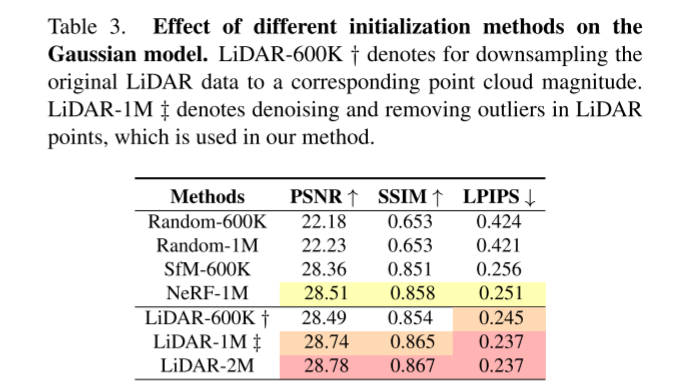
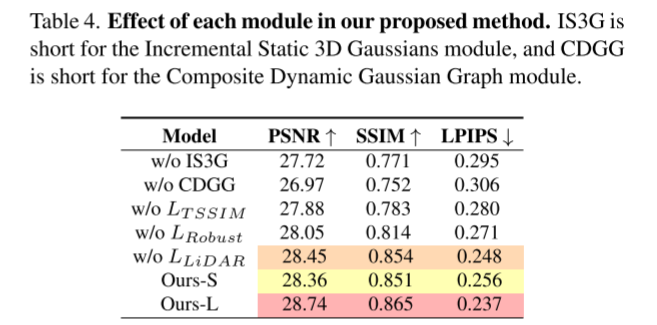
Experimentelle Ergebnisse:
Zusammenfassung:
Dieser Artikel stellt DrivingGaussian vor, eine Methode, die auf dem vorgeschlagenen Composite Gaussian Splatting A basiert neuartiges Framework zur Darstellung groß angelegter dynamischer autonomer Fahrszenarien. DrivingGaussian modelliert schrittweise einen statischen Hintergrund mithilfe inkrementeller statischer 3D-Gauß-Funktionen und erfasst mehrere sich bewegende Objekte mithilfe zusammengesetzter dynamischer Gauß-Karten. In diesem Artikel werden LiDAR-Priors weiter genutzt, um eine genaue Geometrie und Konsistenz bei mehreren Ansichten zu erreichen. DrivingGaussian erreicht modernste Leistung bei zwei autonomen Fahrdatensätzen und ermöglicht eine hochwertige Surround-View-Synthese und dynamische Szenenrekonstruktion
Zitat:
Zhou, X., Lin, Z., Shan, X. , Wang, Y., Sun, D., & Yang, M. (2023): Zusammengesetztes Gaußsches Splatting für dynamische autonome Fahrszenen /abs/2312.07920

Originallink:https:/ / www.php.cn/link/a878dbebc902328b41dbf02aa87abb58
Das obige ist der detaillierte Inhalt vonErweiterte Fahrsimulation: Fahrszenenrekonstruktion mit realistischen Umgebungsdaten. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Verwenden Sie ddrescue, um Daten unter Linux wiederherzustellen
Mar 20, 2024 pm 01:37 PM
Verwenden Sie ddrescue, um Daten unter Linux wiederherzustellen
Mar 20, 2024 pm 01:37 PM
DDREASE ist ein Tool zum Wiederherstellen von Daten von Datei- oder Blockgeräten wie Festplatten, SSDs, RAM-Disks, CDs, DVDs und USB-Speichergeräten. Es kopiert Daten von einem Blockgerät auf ein anderes, wobei beschädigte Blöcke zurückbleiben und nur gute Blöcke verschoben werden. ddreasue ist ein leistungsstarkes Wiederherstellungstool, das vollständig automatisiert ist, da es während der Wiederherstellungsvorgänge keine Unterbrechungen erfordert. Darüber hinaus kann es dank der ddasue-Map-Datei jederzeit gestoppt und fortgesetzt werden. Weitere wichtige Funktionen von DDREASE sind: Es überschreibt die wiederhergestellten Daten nicht, füllt aber die Lücken im Falle einer iterativen Wiederherstellung. Es kann jedoch gekürzt werden, wenn das Tool explizit dazu aufgefordert wird. Stellen Sie Daten aus mehreren Dateien oder Blöcken in einer einzigen wieder her
 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Die von Google geförderte Leistung von JAX hat in jüngsten Benchmark-Tests die von Pytorch und TensorFlow übertroffen und belegt bei 7 Indikatoren den ersten Platz. Und der Test wurde nicht auf der TPU mit der besten JAX-Leistung durchgeführt. Obwohl unter Entwicklern Pytorch immer noch beliebter ist als Tensorflow. Aber in Zukunft werden möglicherweise mehr große Modelle auf Basis der JAX-Plattform trainiert und ausgeführt. Modelle Kürzlich hat das Keras-Team drei Backends (TensorFlow, JAX, PyTorch) mit der nativen PyTorch-Implementierung und Keras2 mit TensorFlow verglichen. Zunächst wählen sie eine Reihe von Mainstream-Inhalten aus
 Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Stehen Sie vor einer Verzögerung oder einer langsamen mobilen Datenverbindung auf dem iPhone? Normalerweise hängt die Stärke des Mobilfunk-Internets auf Ihrem Telefon von mehreren Faktoren ab, wie z. B. der Region, dem Mobilfunknetztyp, dem Roaming-Typ usw. Es gibt einige Dinge, die Sie tun können, um eine schnellere und zuverlässigere Mobilfunk-Internetverbindung zu erhalten. Fix 1 – Neustart des iPhone erzwingen Manchmal werden durch einen erzwungenen Neustart Ihres Geräts viele Dinge zurückgesetzt, einschließlich der Mobilfunkverbindung. Schritt 1 – Drücken Sie einfach einmal die Lauter-Taste und lassen Sie sie los. Drücken Sie anschließend die Leiser-Taste und lassen Sie sie wieder los. Schritt 2 – Der nächste Teil des Prozesses besteht darin, die Taste auf der rechten Seite gedrückt zu halten. Lassen Sie das iPhone den Neustart abschließen. Aktivieren Sie Mobilfunkdaten und überprüfen Sie die Netzwerkgeschwindigkeit. Überprüfen Sie es erneut. Fix 2 – Datenmodus ändern 5G bietet zwar bessere Netzwerkgeschwindigkeiten, funktioniert jedoch besser, wenn das Signal schwächer ist
 Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Ich weine zu Tode. Die Daten im Internet reichen überhaupt nicht aus. Das Trainingsmodell sieht aus wie „Die Tribute von Panem“, und KI-Forscher auf der ganzen Welt machen sich Gedanken darüber, wie sie diese datenhungrigen Esser ernähren sollen. Dieses Problem tritt insbesondere bei multimodalen Aufgaben auf. Zu einer Zeit, als sie ratlos waren, nutzte ein Start-up-Team der Abteilung der Renmin-Universität von China sein eigenes neues Modell, um als erstes in China einen „modellgenerierten Datenfeed selbst“ in die Realität umzusetzen. Darüber hinaus handelt es sich um einen zweigleisigen Ansatz auf der Verständnisseite und der Generierungsseite. Beide Seiten können hochwertige, multimodale neue Daten generieren und Datenrückmeldungen an das Modell selbst liefern. Was ist ein Modell? Awaker 1.0, ein großes multimodales Modell, das gerade im Zhongguancun-Forum erschienen ist. Wer ist das Team? Sophon-Motor. Gegründet von Gao Yizhao, einem Doktoranden an der Hillhouse School of Artificial Intelligence der Renmin University.
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Kürzlich wurde die Militärwelt von der Nachricht überwältigt: US-Militärkampfflugzeuge können jetzt mithilfe von KI vollautomatische Luftkämpfe absolvieren. Ja, erst kürzlich wurde der KI-Kampfjet des US-Militärs zum ersten Mal der Öffentlichkeit zugänglich gemacht und sein Geheimnis gelüftet. Der vollständige Name dieses Jägers lautet „Variable Stability Simulator Test Aircraft“ (VISTA). Er wurde vom Minister der US-Luftwaffe persönlich geflogen, um einen Eins-gegen-eins-Luftkampf zu simulieren. Am 2. Mai startete US-Luftwaffenminister Frank Kendall mit einer X-62AVISTA auf der Edwards Air Force Base. Beachten Sie, dass während des einstündigen Fluges alle Flugaktionen autonom von der KI durchgeführt wurden! Kendall sagte: „In den letzten Jahrzehnten haben wir über das unbegrenzte Potenzial des autonomen Luft-Luft-Kampfes nachgedacht, aber es schien immer unerreichbar.“ Nun jedoch,
