
 Technologie-Peripheriegeräte
KI
Das erste universelle 3D-Grafik- und Textmodellsystem für Möbel und Haushaltsgeräte, das keiner Anleitung bedarf und visuelle Modelle zur Verallgemeinerung verwendet
Technologie-Peripheriegeräte
KI
Das erste universelle 3D-Grafik- und Textmodellsystem für Möbel und Haushaltsgeräte, das keiner Anleitung bedarf und visuelle Modelle zur Verallgemeinerung verwendet
Das erste universelle 3D-Grafik- und Textmodellsystem für Möbel und Haushaltsgeräte, das keiner Anleitung bedarf und visuelle Modelle zur Verallgemeinerung verwendet

Heutzutage wird die gesamte Hausarbeit von Robotern übernommen.
Der Roboter aus Stanford, der Töpfe benutzen kann, ist gerade aufgetaucht, und der Roboter, der Kaffeemaschinen bedienen kann, ist gerade angekommen, Abbildung-01.

Abbildung-01 Schauen Sie sich einfach das Demonstrationsvideo an und führen Sie eine 10-stündige Schulung durch, um die Kaffeemaschine kompetent bedienen zu können. Vom Einlegen der Kaffeekapsel bis zum Drücken der Starttaste ist alles in einem Rutsch erledigt.
Allerdings ist es ein schwieriges Problem, einem Roboter zu ermöglichen, selbstständig den Umgang mit verschiedenen Möbeln und Haushaltsgeräten zu erlernen, ohne dass Demonstrationsvideos erforderlich sind, wenn er ihnen begegnet. Dies erfordert vom Roboter eine starke visuelle Wahrnehmung und Entscheidungsplanungsfähigkeiten sowie präzise Manipulationsfähigkeiten.
Papierlink: https://arxiv.org/abs/2312.01307
Projekthomepage: https://geometry.stanford.edu/projects/sage/
Code: https://github.com/ geng-haoran/SAGE
Überblick über das Forschungsproblem

Abbildung 1: Nach menschlicher Anweisung kann der Roboterarm verschiedene Haushaltsgeräte ohne Anweisung bedienen.
Kürzlich haben PaLM-E und GPT-4V die Anwendung großer Grafikmodelle bei der Planung von Roboteraufgaben gefördert, und die durch visuelle Sprache gesteuerte allgemeine Robotersteuerung ist zu einem beliebten Forschungsgebiet geworden.
Eine gängige Methode in der Vergangenheit bestand darin, ein zweischichtiges System aufzubauen. Das große Grafikmodell der oberen Schicht übernimmt die Planung und Fähigkeitsplanung, und das Steuerungsstrategiemodell der unteren Schicht ist für die physische Ausführung von Aktionen verantwortlich. Wenn Roboter jedoch mit einer Vielzahl von Haushaltsgeräten konfrontiert werden, die sie noch nie zuvor gesehen haben und bei der Hausarbeit mehrstufige Vorgänge erfordern, sind sowohl die obere als auch die untere Ebene der vorhandenen Methoden hilflos.
Nehmen Sie als Beispiel das fortschrittlichste Grafikmodell GPT-4V. Obwohl es ein einzelnes Bild mit Text beschreiben kann, ist es immer noch voller Fehler, wenn es um die Erkennung, Zählung, Positionierung und Statusschätzung betriebsbereiter Teile geht. Die roten Markierungen in Abbildung 2 sind die verschiedenen Fehler, die GPT-4V bei der Beschreibung von Bildern von Kommoden, Öfen und Standschränken gemacht hat. Aufgrund der falschen Beschreibung ist die Fähigkeitsplanung des Roboters offensichtlich unzuverlässig. Abbildung 2: GP

Inspiriert durch die frühere CVPR-Highlight-Arbeit GAPartNet [1] des Teams von Professor Wang He konzentrierte sich das Forschungsteam auf gemeinsame Teile (GAParts) in verschiedenen Kategorien von Haushaltsgeräten. Obwohl sich Haushaltsgeräte ständig ändern, gibt es immer einige Teile, die unverzichtbar sind. Zwischen jedem Haushaltsgerät und diesen gemeinsamen Teilen bestehen ähnliche Geometrien und Interaktionsmuster. Als Ergebnis stellte das Forschungsteam das Konzept von GAPart in der Arbeit GAPartNet [1] vor. GAPart bezieht sich auf eine generalisierbare und interaktive Komponente. GAPart erscheint auf verschiedenen Kategorien von aufklappbaren Objekten. Beispielsweise finden sich aufklappbare Türen in Tresoren, Kleiderschränken und Kühlschränken. Wie in Abbildung 3 dargestellt, kommentiert GAPartNet [1] die Semantik und Pose von GAPart für verschiedene Objekttypen. Abbildung 3: GAPart: generalisierbare und interaktive Teile [1].
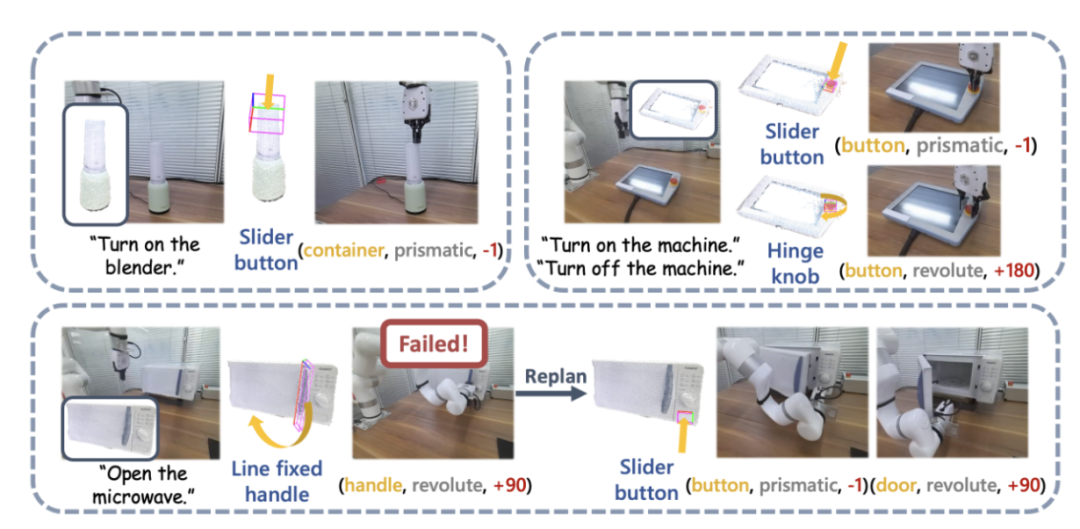
Basierend auf früheren Forschungen führte das Forschungsteam auf kreative Weise GAPart basierend auf dreidimensionalem Sehen in das Objektmanipulationssystem SAGE des Roboters ein. SAGE wird Informationen für VLM und LLM durch verallgemeinerbare 3D-Teileerkennung und genaue Posenschätzung bereitstellen. Auf der Entscheidungsebene löst die neue Methode das Problem unzureichender präziser Berechnungs- und Argumentationsfunktionen des zweidimensionalen Grafikmodells. Auf der Ausführungsebene erreicht die neue Methode verallgemeinerte Operationen für jeden Teil durch eine robuste API für physikalische Operationen GAPart-Posen.
SAGE stellt das erste dreidimensionale verkörperte Grafik- und Text-Großmodellsystem dar, das neue Ideen für die gesamte Verbindung von Robotern von der Wahrnehmung über die physische Interaktion bis hin zum Feedback liefert und neue Wege für Roboter erforscht, komplexe Objekte wie z B. Möbel und Haushaltsgeräte.
Systemeinführung
Abbildung 4 zeigt den grundlegenden Prozess von SAGE. Zunächst analysiert ein Befehlsinterpretationsmodul, das den Kontext interpretieren kann, die in den Roboter eingegebenen Anweisungen und seine Beobachtungen und wandelt diese Analysen in das nächste Roboteraktionsprogramm und die zugehörigen semantischen Teile um. Als nächstes ordnet SAGE den semantischen Teil (z. B. den Container) dem Teil zu, der bedient werden muss (z. B. die Schiebeschaltfläche) und generiert Aktionen (z. B. die Aktion „Drücken“ der Schaltfläche), um die Aufgabe abzuschließen.

Abbildung 4: Methodenübersicht.
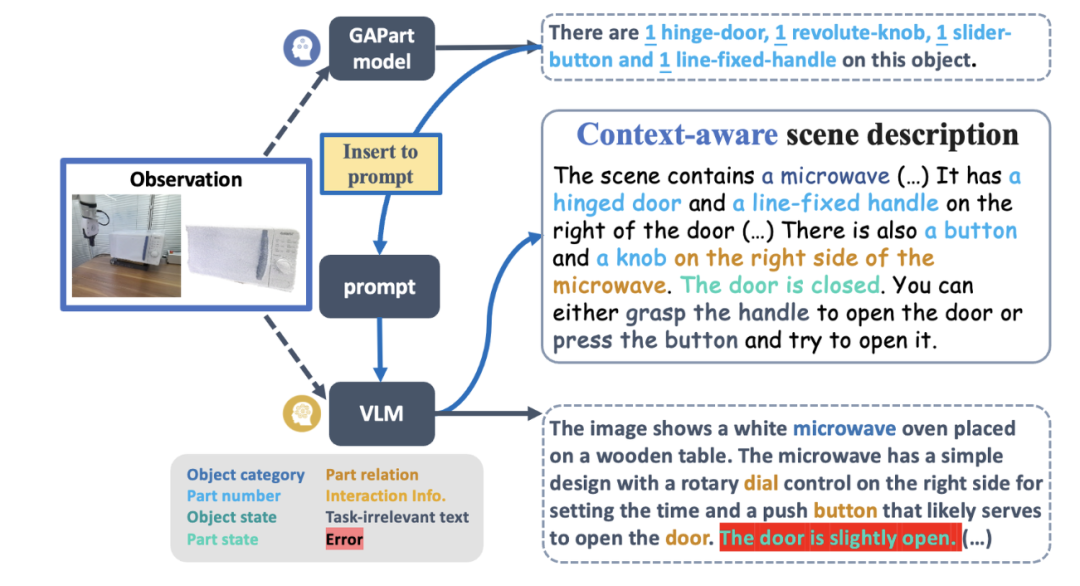
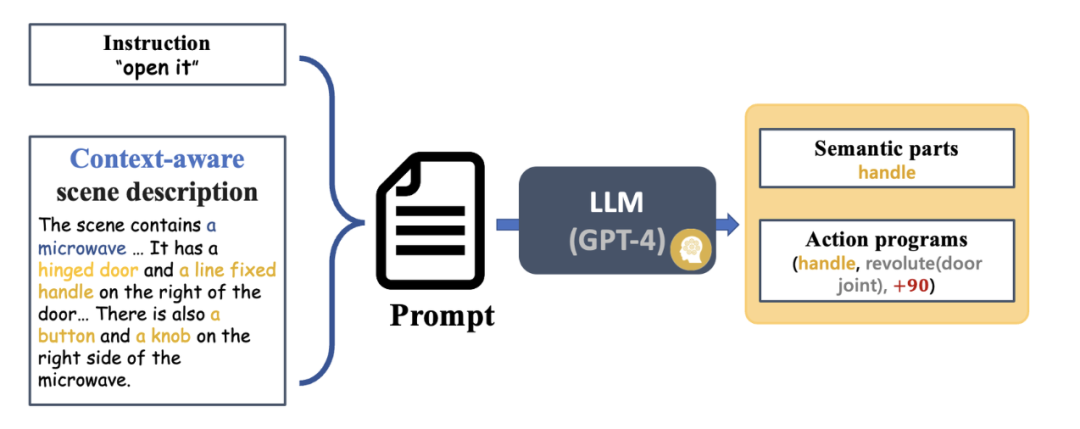
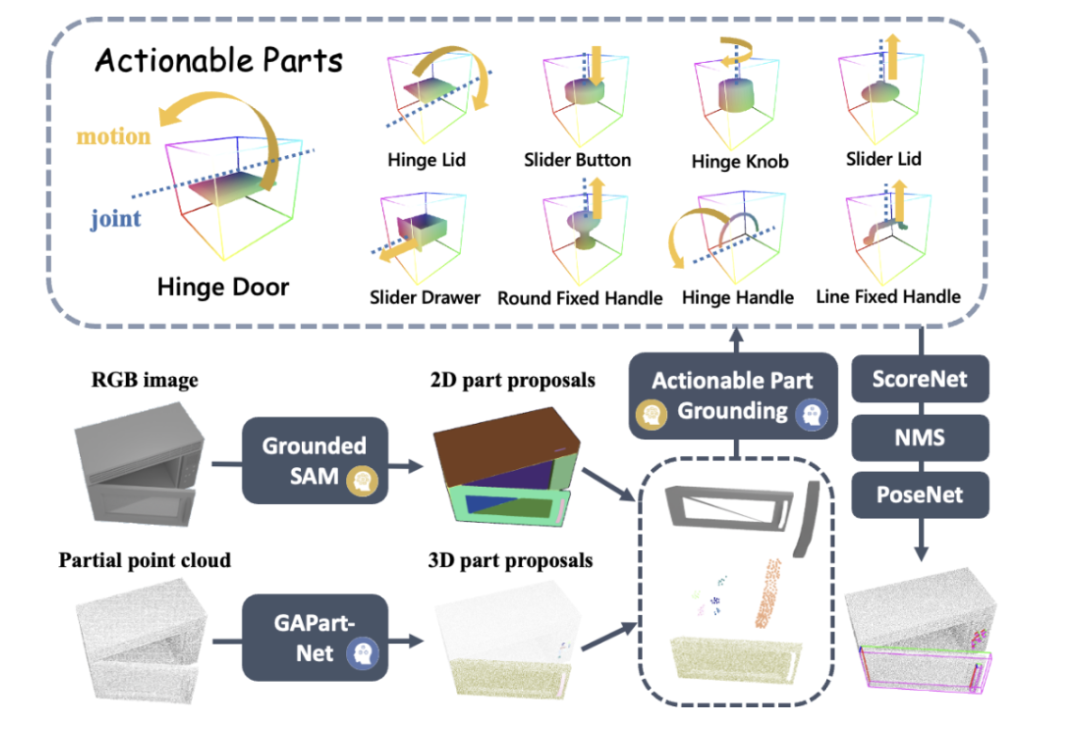


Abbildung 11: SAPIEN-Simulationsexperiment.
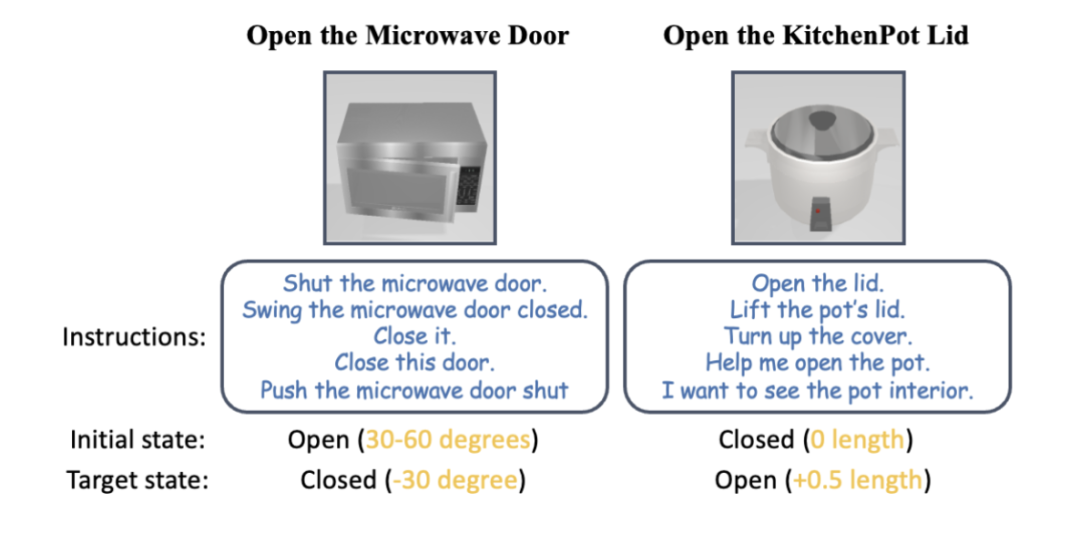
Sie nutzten die SAPIEN-Umgebung [4] zur Durchführung von Simulationsexperimenten und entwarfen 12 sprachgesteuerte Aufgaben zur Manipulation artikulierter Objekte. Für jede Kategorie von Mikrowellenherden, Aufbewahrungsmöbeln und Schränken wurden drei Aufgaben entworfen, darunter offene und geschlossene Zustände in unterschiedlichen Ausgangszuständen. Weitere Aufgaben sind „Topfdeckel öffnen“, „Taste auf der Fernbedienung drücken“ und „Mixer starten“. Experimentelle Ergebnisse zeigen, dass SAGE bei fast allen Aufgaben gute Leistungen erbringt.
Zusammenfassung
SAGE ist das erste visuelle 3D-Sprachmodell-Framework, das allgemeine Manipulationsanweisungen für komplexe artikulierte Objekte wie Möbel und Haushaltsgeräte generieren kann. Es wandelt sprachgesteuerte Aktionen in ausführbare Manipulationen um, indem es Objektsemantik und Bedienbarkeitsverständnis auf Teileebene verbindet.
Teamvorstellung
SAGE Dieses Forschungsergebnis stammt aus dem Labor von Professor Leonidas Guibas von der Stanford University, dem Embodied Perception and Interaction (EPIC Lab) von Professor Wang He von der Peking University und dem Zhiyuan Artificial Intelligence Research Institute. Die Autoren des Papiers sind der Student der Universität Peking und Gastwissenschaftler der Stanford University, Geng Haoran (Co-Autor), der Doktorand der Universität Peking, Wei Songlin (Co-Autor), die Doktoranden der Stanford University, Deng Congyue und Shen Bokui, und die Betreuer sind Professor Leonidas Guibas und Professor Wang He.Referenzen:
[2] Kirillov, Alexander, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao et al. „Alles segmentieren.“ arXiv-Vorabdruck arXiv:2304.02643 (2023).
[3] Zhang, Hao, Feng Li, Shilong Liu, Lei Zhang, Hang Su, Jun Zhu, Lionel M. Ni und Heung-Yeung Shum Objekterkennung beenden.“ arXiv-Vorabdruck arXiv:2203.03605 (2022). [4] Xiang, Fanbo, Yuzhe Qin, Kaichun Mo, Yikuan interaktive Umgebung.“ In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, S. 11097-11107, 2020.
Das obige ist der detaillierte Inhalt vonDas erste universelle 3D-Grafik- und Textmodellsystem für Möbel und Haushaltsgeräte, das keiner Anleitung bedarf und visuelle Modelle zur Verallgemeinerung verwendet. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1386
1386
 52
52

 Der Autor von ControlNet hat einen weiteren Hit! Der gesamte Prozess der Generierung eines Gemäldes aus einem Bild, der in zwei Tagen 1,4.000 Sterne verdient
Jul 17, 2024 am 01:56 AM
Der Autor von ControlNet hat einen weiteren Hit! Der gesamte Prozess der Generierung eines Gemäldes aus einem Bild, der in zwei Tagen 1,4.000 Sterne verdient
Jul 17, 2024 am 01:56 AM
Es ist ebenfalls ein Tusheng-Video, aber PaintsUndo ist einen anderen Weg gegangen. ControlNet-Autor LvminZhang begann wieder zu leben! Dieses Mal ziele ich auf den Bereich der Malerei. Das neue Projekt PaintsUndo hat nicht lange nach seinem Start 1,4.000 Sterne erhalten (die immer noch wahnsinnig steigen). Projektadresse: https://github.com/lllyasviel/Paints-UNDO Bei diesem Projekt gibt der Benutzer ein statisches Bild ein, und PaintsUndo kann Ihnen dabei helfen, automatisch ein Video des gesamten Malprozesses zu erstellen, vom Linienentwurf bis zum fertigen Produkt . Während des Zeichenvorgangs sind die Linienänderungen erstaunlich. Das Endergebnis des Videos ist dem Originalbild sehr ähnlich: Schauen wir uns eine vollständige Zeichnung an.
 Die agentenlose Lösung von UIUC steht ganz oben auf der Liste der Open-Source-KI-Softwareentwickler und löst problemlos echte Programmierprobleme im SWE-Bench
Jul 17, 2024 pm 10:02 PM
Die agentenlose Lösung von UIUC steht ganz oben auf der Liste der Open-Source-KI-Softwareentwickler und löst problemlos echte Programmierprobleme im SWE-Bench
Jul 17, 2024 pm 10:02 PM
Die AIxiv-Kolumne ist eine Kolumne, in der diese Website akademische und technische Inhalte veröffentlicht. In den letzten Jahren sind in der AIxiv-Kolumne dieser Website mehr als 2.000 Berichte eingegangen, die Spitzenlabore großer Universitäten und Unternehmen auf der ganzen Welt abdecken und so den akademischen Austausch und die Verbreitung wirksam fördern. Wenn Sie hervorragende Arbeiten haben, die Sie teilen möchten, können Sie gerne einen Beitrag leisten oder uns für die Berichterstattung kontaktieren. Einreichungs-E-Mail: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com Die Autoren dieses Artikels stammen alle aus dem Team von Lehrer Zhang Lingming an der University of Illinois in Urbana-Champaign, darunter: Steven Code Repair; Doktorand im vierten Jahr, Forscher
 Posthume Arbeit des OpenAI Super Alignment Teams: Zwei große Modelle spielen ein Spiel und die Ausgabe wird verständlicher
Jul 19, 2024 am 01:29 AM
Posthume Arbeit des OpenAI Super Alignment Teams: Zwei große Modelle spielen ein Spiel und die Ausgabe wird verständlicher
Jul 19, 2024 am 01:29 AM
Wenn die Antwort des KI-Modells überhaupt unverständlich ist, würden Sie es wagen, sie zu verwenden? Da maschinelle Lernsysteme in immer wichtigeren Bereichen eingesetzt werden, wird es immer wichtiger zu zeigen, warum wir ihren Ergebnissen vertrauen können und wann wir ihnen nicht vertrauen sollten. Eine Möglichkeit, Vertrauen in die Ausgabe eines komplexen Systems zu gewinnen, besteht darin, vom System zu verlangen, dass es eine Interpretation seiner Ausgabe erstellt, die für einen Menschen oder ein anderes vertrauenswürdiges System lesbar ist, d. h. so vollständig verständlich, dass mögliche Fehler erkannt werden können gefunden. Um beispielsweise Vertrauen in das Justizsystem aufzubauen, verlangen wir von den Gerichten, dass sie klare und lesbare schriftliche Stellungnahmen abgeben, die ihre Entscheidungen erläutern und stützen. Für große Sprachmodelle können wir auch einen ähnlichen Ansatz verfolgen. Stellen Sie bei diesem Ansatz jedoch sicher, dass das Sprachmodell generiert wird
 Von RLHF über DPO bis TDPO sind große Modellausrichtungsalgorithmen bereits auf „Token-Ebene'
Jun 24, 2024 pm 03:04 PM
Von RLHF über DPO bis TDPO sind große Modellausrichtungsalgorithmen bereits auf „Token-Ebene'
Jun 24, 2024 pm 03:04 PM
Die AIxiv-Kolumne ist eine Kolumne, in der diese Website akademische und technische Inhalte veröffentlicht. In den letzten Jahren sind in der AIxiv-Kolumne dieser Website mehr als 2.000 Berichte eingegangen, die Spitzenlabore großer Universitäten und Unternehmen auf der ganzen Welt abdecken und so den akademischen Austausch und die Verbreitung wirksam fördern. Wenn Sie hervorragende Arbeiten haben, die Sie teilen möchten, können Sie gerne einen Beitrag leisten oder uns für die Berichterstattung kontaktieren. Einreichungs-E-Mail: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com Im Entwicklungsprozess der künstlichen Intelligenz war die Steuerung und Führung großer Sprachmodelle (LLM) schon immer eine der zentralen Herausforderungen, um sicherzustellen, dass diese Modelle beides sind kraftvoll und sicher dienen der menschlichen Gesellschaft. Frühe Bemühungen konzentrierten sich auf Methoden des verstärkenden Lernens durch menschliches Feedback (RL
 arXiv-Artikel können als „Barrage' gepostet werden, die Diskussionsplattform von Stanford alphaXiv ist online, LeCun gefällt es
Aug 01, 2024 pm 05:18 PM
arXiv-Artikel können als „Barrage' gepostet werden, die Diskussionsplattform von Stanford alphaXiv ist online, LeCun gefällt es
Aug 01, 2024 pm 05:18 PM
Prost! Wie ist es, wenn es bei einer Papierdiskussion auf Worte ankommt? Kürzlich haben Studenten der Stanford University alphaXiv erstellt, ein offenes Diskussionsforum für arXiv-Artikel, das es ermöglicht, Fragen und Kommentare direkt zu jedem arXiv-Artikel zu posten. Website-Link: https://alphaxiv.org/ Tatsächlich ist es nicht erforderlich, diese Website speziell zu besuchen. Ändern Sie einfach arXiv in einer beliebigen URL in alphaXiv, um den entsprechenden Artikel direkt im alphaXiv-Forum zu öffnen: Sie können die Absätze darin genau lokalisieren das Papier, Satz: Im Diskussionsbereich auf der rechten Seite können Benutzer Fragen stellen, um dem Autor Fragen zu den Ideen und Details des Papiers zu stellen. Sie können beispielsweise auch den Inhalt des Papiers kommentieren, wie zum Beispiel: „Gegeben an.“
 Ein bedeutender Durchbruch in der Riemann-Hypothese! Tao Zhexuan empfiehlt dringend neue Arbeiten vom MIT und Oxford, und der 37-jährige Fields-Medaillengewinner nahm daran teil
Aug 05, 2024 pm 03:32 PM
Ein bedeutender Durchbruch in der Riemann-Hypothese! Tao Zhexuan empfiehlt dringend neue Arbeiten vom MIT und Oxford, und der 37-jährige Fields-Medaillengewinner nahm daran teil
Aug 05, 2024 pm 03:32 PM
Kürzlich gelang der Riemann-Hypothese, die als eines der sieben großen Probleme des Jahrtausends bekannt ist, ein neuer Durchbruch. Die Riemann-Hypothese ist ein sehr wichtiges ungelöstes Problem in der Mathematik, das sich auf die genauen Eigenschaften der Verteilung von Primzahlen bezieht (Primzahlen sind Zahlen, die nur durch 1 und sich selbst teilbar sind, und sie spielen eine grundlegende Rolle in der Zahlentheorie). In der heutigen mathematischen Literatur gibt es mehr als tausend mathematische Thesen, die auf der Aufstellung der Riemann-Hypothese (oder ihrer verallgemeinerten Form) basieren. Mit anderen Worten: Sobald die Riemann-Hypothese und ihre verallgemeinerte Form bewiesen sind, werden diese mehr als tausend Sätze als Theoreme etabliert, die einen tiefgreifenden Einfluss auf das Gebiet der Mathematik haben werden, und wenn sich die Riemann-Hypothese als falsch erweist, dann unter anderem Auch diese Sätze werden teilweise ihre Gültigkeit verlieren. Neuer Durchbruch kommt von MIT-Mathematikprofessor Larry Guth und der Universität Oxford
 Das erste Mamba-basierte MLLM ist da! Modellgewichte, Trainingscode usw. waren alle Open Source
Jul 17, 2024 am 02:46 AM
Das erste Mamba-basierte MLLM ist da! Modellgewichte, Trainingscode usw. waren alle Open Source
Jul 17, 2024 am 02:46 AM
Die AIxiv-Kolumne ist eine Kolumne, in der diese Website akademische und technische Inhalte veröffentlicht. In den letzten Jahren sind in der AIxiv-Kolumne dieser Website mehr als 2.000 Berichte eingegangen, die Spitzenlabore großer Universitäten und Unternehmen auf der ganzen Welt abdecken und so den akademischen Austausch und die Verbreitung wirksam fördern. Wenn Sie hervorragende Arbeiten haben, die Sie teilen möchten, können Sie gerne einen Beitrag leisten oder uns für die Berichterstattung kontaktieren. E-Mail-Adresse: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com. Einleitung In den letzten Jahren hat die Anwendung multimodaler großer Sprachmodelle (MLLM) in verschiedenen Bereichen bemerkenswerte Erfolge erzielt. Als Grundmodell für viele nachgelagerte Aufgaben besteht aktuelles MLLM jedoch aus dem bekannten Transformer-Netzwerk, das
 Axiomatisches Training ermöglicht es LLM, kausales Denken zu erlernen: Das 67-Millionen-Parameter-Modell ist vergleichbar mit der Billionen-Parameter-Ebene GPT-4
Jul 17, 2024 am 10:14 AM
Axiomatisches Training ermöglicht es LLM, kausales Denken zu erlernen: Das 67-Millionen-Parameter-Modell ist vergleichbar mit der Billionen-Parameter-Ebene GPT-4
Jul 17, 2024 am 10:14 AM
Zeigen Sie LLM die Kausalkette und es lernt die Axiome. KI hilft Mathematikern und Wissenschaftlern bereits bei der Forschung. Beispielsweise hat der berühmte Mathematiker Terence Tao wiederholt seine Forschungs- und Forschungserfahrungen mit Hilfe von KI-Tools wie GPT geteilt. Damit KI in diesen Bereichen konkurrenzfähig sein kann, sind starke und zuverlässige Fähigkeiten zum kausalen Denken unerlässlich. Die in diesem Artikel vorgestellte Forschung ergab, dass ein Transformer-Modell, das auf die Demonstration des kausalen Transitivitätsaxioms für kleine Graphen trainiert wurde, auf das Transitivitätsaxiom für große Graphen verallgemeinern kann. Mit anderen Worten: Wenn der Transformer lernt, einfache kausale Überlegungen anzustellen, kann er für komplexere kausale Überlegungen verwendet werden. Der vom Team vorgeschlagene axiomatische Trainingsrahmen ist ein neues Paradigma zum Erlernen des kausalen Denkens auf der Grundlage passiver Daten, nur mit Demonstrationen
