
 Technologie-Peripheriegeräte
KI
Der humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden
Technologie-Peripheriegeräte
KI
Der humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden
Der humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden

Laut dem offiziellen OpenHarmony-Konto gab Lejus „Kuafu“-Roboter heute bekannt, dass er die Kompatibilitätsbewertung der OpenHarmony 3.2 Release-Version bestanden hat
Berichten zufolge wurde Kuafu Robot gemeinsam von Shenzhen Kaihong und Leju Robot Technology Co., Ltd. (kurz „Leju“) entwickelt und wird als „der erste inländische Open-Source-Hongmeng mit der Fähigkeit zu springen und sich an das Weitergehen anzupassen“ bezeichnet verschiedene Gelände „Humanoider Roboter“
▲ Bildquelle Offizielle Leju-Website (dasselbe unten)
IT Home erfuhr aus den Nachrichten, dass der Roboter mit dem von Shenzhen Kaihong entwickelten Betriebssystem KaihongOS ausgestattet ist, das auf dem Open-Source-System Hongmeng basiert. Es verfügt über ein Full-Stack-Open-Source-Design und die Bewegungssteuerung ist vollständig Open Source. Der Roboter kann mit Modulen wie Flugbahnplanung, Feedback-Steuerung und Zustandsschätzung verbunden werden und sein Gangalgorithmus behauptet, dass er sich an verschiedene Untergründe, einschließlich Sand, Gras und Hindernisse, anpassen kann und bis zu 20 Zentimeter weit springen kann
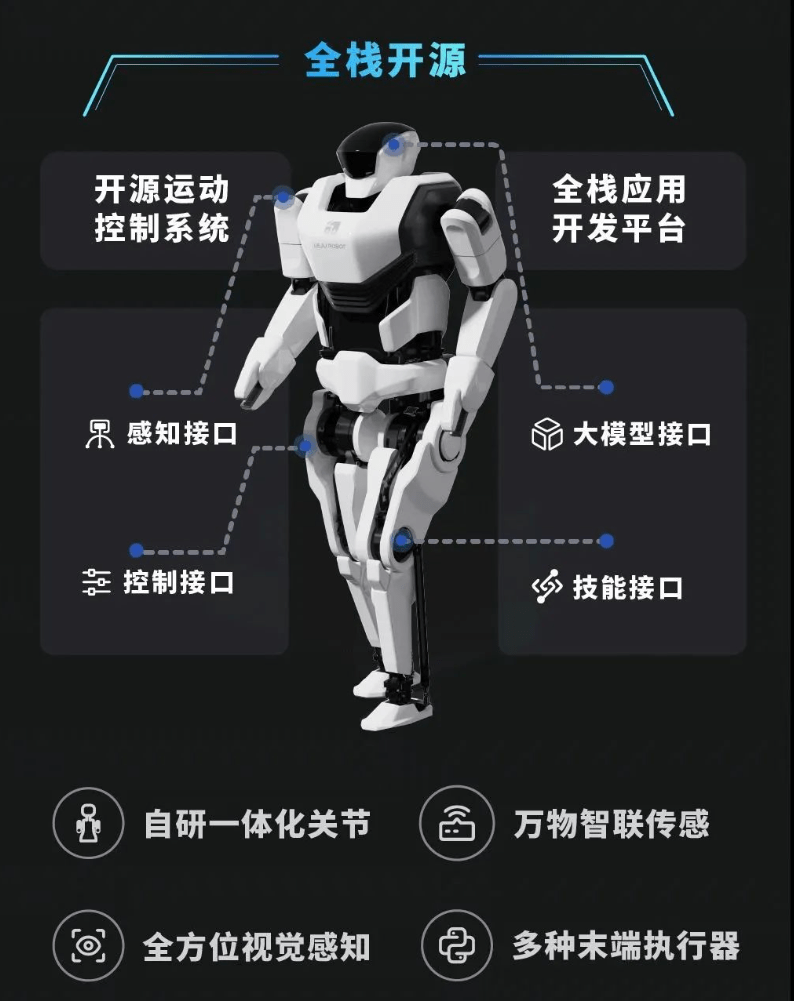
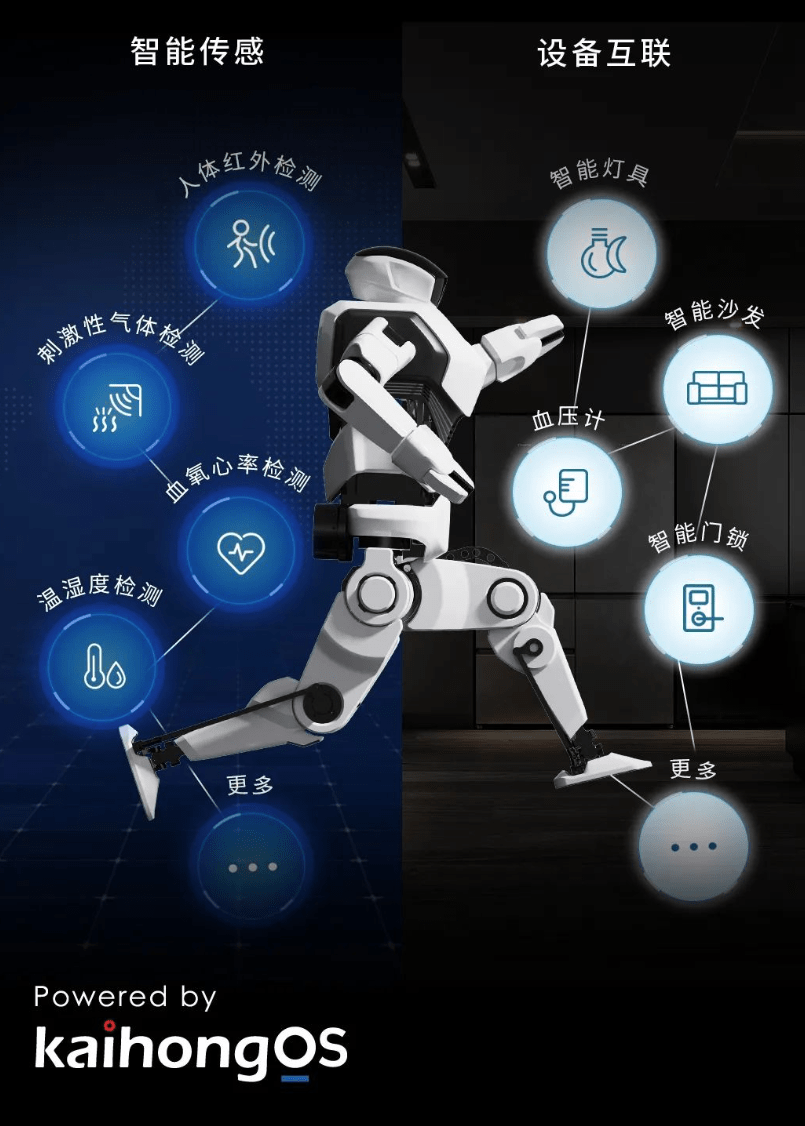
In Bezug auf die Wahrnehmung kann dieser Roboter mit verschiedenen Kaihong-Sensoren ausgestattet werden und ist mit einer Tiefenkamera ausgestattet. Es kann auch mit einer Vielzahl von Endzubehörteilen für die Sekundärentwicklung verwendet und mit gängigen Großmodellen verbunden werden
Das obige ist der detaillierte Inhalt vonDer humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 Ich habe versucht, die Vibe -Codierung mit Cursor AI und es ist erstaunlich!
Mar 20, 2025 pm 03:34 PM
Ich habe versucht, die Vibe -Codierung mit Cursor AI und es ist erstaunlich!
Mar 20, 2025 pm 03:34 PM
Die Vibe -Codierung verändert die Welt der Softwareentwicklung, indem wir Anwendungen mit natürlicher Sprache anstelle von endlosen Codezeilen erstellen können. Inspiriert von Visionären wie Andrej Karpathy, lässt dieser innovative Ansatz Dev
 Top 5 Genai Starts vom Februar 2025: GPT-4,5, GROK-3 & MEHR!
Mar 22, 2025 am 10:58 AM
Top 5 Genai Starts vom Februar 2025: GPT-4,5, GROK-3 & MEHR!
Mar 22, 2025 am 10:58 AM
Februar 2025 war ein weiterer bahnbrechender Monat für die Generative KI, die uns einige der am meisten erwarteten Modell-Upgrades und bahnbrechenden neuen Funktionen gebracht hat. Von Xais Grok 3 und Anthropics Claude 3.7 -Sonett, um g zu eröffnen
 Wie benutze ich Yolo V12 zur Objekterkennung?
Mar 22, 2025 am 11:07 AM
Wie benutze ich Yolo V12 zur Objekterkennung?
Mar 22, 2025 am 11:07 AM
Yolo (Sie schauen nur einmal) war ein führender Echtzeit-Objekterkennungsrahmen, wobei jede Iteration die vorherigen Versionen verbessert. Die neueste Version Yolo V12 führt Fortschritte vor, die die Genauigkeit erheblich verbessern
 Ist Chatgpt 4 o verfügbar?
Mar 28, 2025 pm 05:29 PM
Ist Chatgpt 4 o verfügbar?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 ist derzeit verfügbar und weit verbreitet, wodurch im Vergleich zu seinen Vorgängern wie ChatGPT 3.5 signifikante Verbesserungen beim Verständnis des Kontextes und des Generierens kohärenter Antworten zeigt. Zukünftige Entwicklungen können mehr personalisierte Inters umfassen
 Gencast von Google: Wettervorhersage mit Gencast Mini Demo
Mar 16, 2025 pm 01:46 PM
Gencast von Google: Wettervorhersage mit Gencast Mini Demo
Mar 16, 2025 pm 01:46 PM
Gencast von Google Deepmind: Eine revolutionäre KI für die Wettervorhersage Die Wettervorhersage wurde einer dramatischen Transformation unterzogen, die sich von rudimentären Beobachtungen zu ausgefeilten AI-angetriebenen Vorhersagen überschreitet. Google DeepMinds Gencast, ein Bodenbrei
 Welche KI ist besser als Chatgpt?
Mar 18, 2025 pm 06:05 PM
Welche KI ist besser als Chatgpt?
Mar 18, 2025 pm 06:05 PM
Der Artikel erörtert KI -Modelle, die Chatgpt wie Lamda, Lama und Grok übertreffen und ihre Vorteile in Bezug auf Genauigkeit, Verständnis und Branchenauswirkungen hervorheben. (159 Charaktere)
 Beste KI -Kunstgeneratoren (kostenlos & amp; bezahlt) für kreative Projekte
Apr 02, 2025 pm 06:10 PM
Beste KI -Kunstgeneratoren (kostenlos & amp; bezahlt) für kreative Projekte
Apr 02, 2025 pm 06:10 PM
Der Artikel überprüft Top -KI -Kunstgeneratoren, diskutiert ihre Funktionen, Eignung für kreative Projekte und Wert. Es zeigt MidJourney als den besten Wert für Fachkräfte und empfiehlt Dall-E 2 für hochwertige, anpassbare Kunst.
 O1 gegen GPT-4O: Ist OpenAIs neues Modell besser als GPT-4O?
Mar 16, 2025 am 11:47 AM
O1 gegen GPT-4O: Ist OpenAIs neues Modell besser als GPT-4O?
Mar 16, 2025 am 11:47 AM
Openais O1: Ein 12-tägiger Geschenkbummel beginnt mit ihrem bisher mächtigsten Modell Die Ankunft im Dezember bringt eine globale Verlangsamung, Schneeflocken in einigen Teilen der Welt, aber Openai fängt gerade erst an. Sam Altman und sein Team starten ein 12-tägiges Geschenk Ex
