
 Technologie-Peripheriegeräte
KI
Der DeepMind-Roboter von Google hat drei Ergebnisse in Folge veröffentlicht! Beide Funktionen wurden vollständig verbessert und das Datenerfassungssystem kann 20 Roboter gleichzeitig verwalten.
Technologie-Peripheriegeräte
KI
Der DeepMind-Roboter von Google hat drei Ergebnisse in Folge veröffentlicht! Beide Funktionen wurden vollständig verbessert und das Datenerfassungssystem kann 20 Roboter gleichzeitig verwalten.
Der DeepMind-Roboter von Google hat drei Ergebnisse in Folge veröffentlicht! Beide Funktionen wurden vollständig verbessert und das Datenerfassungssystem kann 20 Roboter gleichzeitig verwalten.

Fast zeitgleich mit Stanfords „Shrimp Fried and Dishwashing“-Roboter veröffentlichte Google DeepMind auch seine neuesten Ergebnisse der verkörperten Intelligenz.
... - schnell Gleichzeitig hat die Qualität nicht abgenommen und die Genauigkeit ist um 10,6 % gestiegen.
Dann gibt es ein neues Framework
spezialisiert auf Generalisierungsfähigkeiten, das Bewegungsbahnaufforderungen für den Roboter erstellen kann, sodass dieser 41 noch nie dagewesene Aufgaben bewältigen und eine Erfolgsquote von 63 % erreichen kann.
Unterschätzen Sie diese Vielfalt nicht, 
. Das letzte ist ein
Roboterdatenerfassungssystem , das 20 Roboter gleichzeitig verwalten kann. Bisher wurden 77.000 experimentelle Daten aus ihren Aktivitäten gesammelt. Sie werden Google dabei helfen, die nachfolgende Trainingsarbeit besser abzuschließen.
, das 20 Roboter gleichzeitig verwalten kann. Bisher wurden 77.000 experimentelle Daten aus ihren Aktivitäten gesammelt. Sie werden Google dabei helfen, die nachfolgende Trainingsarbeit besser abzuschließen.
Was sind also diese drei Ergebnisse konkret? Schauen wir sie uns einzeln an.
Der erste Schritt in der täglichen Anwendung von Robotern: Sie können Aufgaben, die Sie noch nie zuvor gesehen haben, direkt ausführen.Google wies darauf hin, dass zwei grundlegende Herausforderungen gelöst werden müssen, um einen Roboter zu realisieren, der wirklich in die reale Welt eindringen kann. 1. Neue Fähigkeit zur Aufgabenförderung
2. Verbesserung der Entscheidungsgeschwindigkeit Die ersten beiden Ergebnisse dieser dreiteiligen Serie sind hauptsächlich Verbesserungen in diesen beiden Bereichen und basieren beide auf Googles grundlegendem Robotermodell Robotics Transformer
Die ersten beiden Ergebnisse dieser dreiteiligen Serie sind hauptsächlich Verbesserungen in diesen beiden Bereichen und basieren beide auf Googles grundlegendem Robotermodell Robotics Transformer
.
Schauen wir uns zunächst die erste an:
RT-Trajectory
, die Robotern bei der Verallgemeinerung hilft.
Für Menschen sind Aufgaben wie das Reinigen des Tisches leicht zu verstehen, aber Roboter verstehen es nicht sehr gut.
Aber glücklicherweise können wir ihm diese Anweisung auf vielfältige Weise vermitteln, sodass er tatsächlich körperliche Maßnahmen ergreifen kann. Im Allgemeinen besteht die traditionelle Methode darin, die Aufgabe einer bestimmten Aktion zuzuordnen und sie dann vom Roboterarm ausführen zu lassen. Beispielsweise kann das Abwischen des Tisches in „Klammer schließen, nach links bewegen, nach rechts bewegen“ zerlegt werden.
Offensichtlich ist die Generalisierungsfähigkeit dieser Methode sehr schlecht. Hier bringt Googles neu vorgeschlagene RT-Trajectory dem Roboter bei, Aufgaben zu erledigen, indem sie ihn mit visuellen Hinweisen versorgt.
Konkret werden von RT-Trajectory gesteuerte Roboter während des Trainings 2D-Trajektorien-verbesserte Daten hinzufügen. Diese Flugbahnen werden als RGB-Bilder dargestellt, einschließlich Routen und Schlüsselpunkten, und liefern einfache, aber sehr nützliche Hinweise, während der Roboter lernt, Aufgaben auszuführen. Mit diesem Modell wurde die Erfolgsquote von Robotern, die noch nie dagewesene Aufgaben ausführen, direkt um das 1-fache erhöht(im Vergleich zu Googles Basisrobotermodell RT-2, von 29 % => 63 %)
. Was noch erwähnenswert ist, ist, dass RT-Trajectory Flugbahnen auf verschiedene Arten erstellen kann, unter anderem:durch das Ansehen menschlicher Demonstrationen, das Akzeptieren handgezeichneter Skizzen und die Generierung durch VLM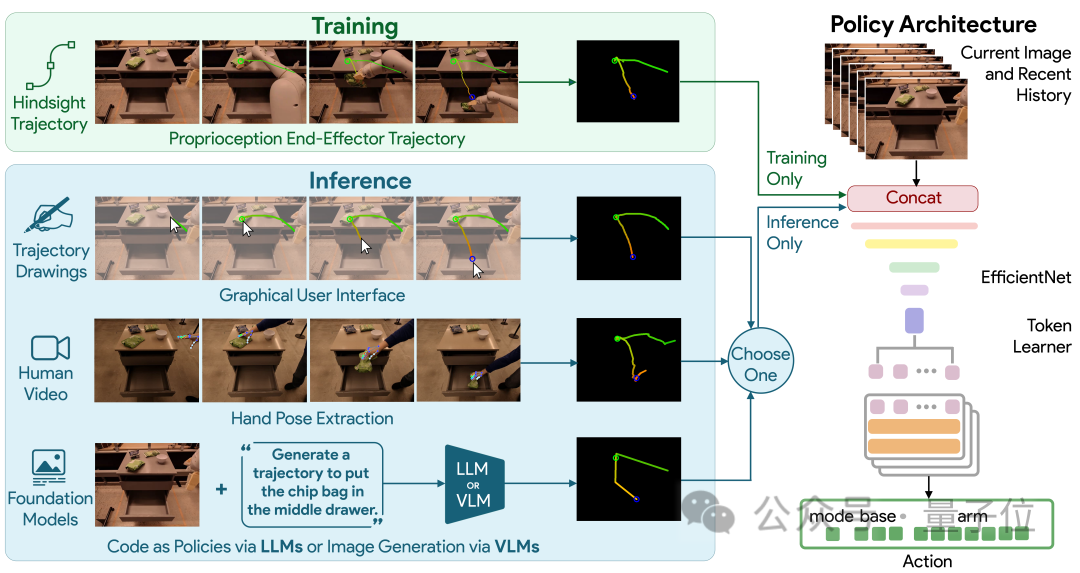 (Visual Language Model)
(Visual Language Model)
Der zweite Schritt der täglichen Robotisierung: Die Entscheidungsgeschwindigkeit muss schnell seinNachdem die Generalisierungsfähigkeit verbessert wurde, konzentrieren wir uns auf die Entscheidungsgeschwindigkeit.
Das RT-Modell von Google verwendet die Transformer-Architektur. Obwohl der Transformer leistungsstark ist, ist er stark auf das Aufmerksamkeitsmodul mit quadratischer Komplexität angewiesen.
Sobald also die Eingaben in das RT-Modell verdoppelt werden (z. B. die Ausstattung des Roboters mit einem Sensor mit höherer Auflösung)
 Um die Geschwindigkeit von Robotern zu verbessern, hat Google
Um die Geschwindigkeit von Robotern zu verbessern, hat Google
SARA-RT
auf dem Basismodell Robotics Transformer entwickelt.
SARA-RT verwendet eine neue Methode zur Modellfeinabstimmung, um das ursprüngliche RT-Modell effizienter zu machen.
Diese Methode wird von Google als „Up-Training“ bezeichnet. Ihre Hauptfunktion besteht darin, die ursprüngliche quadratische Komplexität in lineare Komplexität umzuwandeln und dabei die Verarbeitungsqualität beizubehalten.
Wenn SARA-RT auf das RT-2-Modell mit Milliarden von Parametern angewendet wird, kann letzteres bei einer Vielzahl von Aufgaben schnellere Betriebsgeschwindigkeiten und höhere Genauigkeit erreichen.
Erwähnenswert ist auch, dass SARA-RT eine universelle Methode zur Beschleunigung von Transformer ohne teures Vortraining bietet, sodass es gut gefördert werden kann.
Nicht genügend Daten? Erstellen Sie es selbst
Um Robotern dabei zu helfen, die von Menschen zugewiesenen Aufgaben besser zu verstehen, begann Google auch mit Daten und baute direkt ein Erfassungssystem auf: AutoRT.
Dieses System kombiniert große Modelle (einschließlich LLM und VLM) mit Robotersteuerungsmodellen (RT) , um den Roboter kontinuierlich anzuweisen, verschiedene Aufgaben in der realen Welt auszuführen und so Daten zu generieren und zu sammeln.
Der spezifische Prozess ist wie folgt:
Lassen Sie den Roboter „frei“ mit der Umgebung in Kontakt treten und sich dem Ziel nähern.
Dann verwenden Sie die Kamera und das VLM-Modell, um die Szene vor Ihnen zu beschreiben, einschließlich der spezifischen Elemente.
Dann verwendet LLM diese Informationen, um verschiedene Aufgaben zu generieren.
Bitte beachten Sie, dass der Roboter nach der Generierung nicht sofort ausgeführt wird. Stattdessen wird LLM verwendet, um zu filternwelche Aufgaben unabhängig erledigt werden können, welche eine menschliche Fernsteuerung erfordern und welche nicht erledigt werden können alle.
Was nicht möglich ist, ist „die Tüte mit Kartoffelchips zu öffnen“, da dafür zwei Roboterarme (standardmäßig nur 1) erforderlich sind.
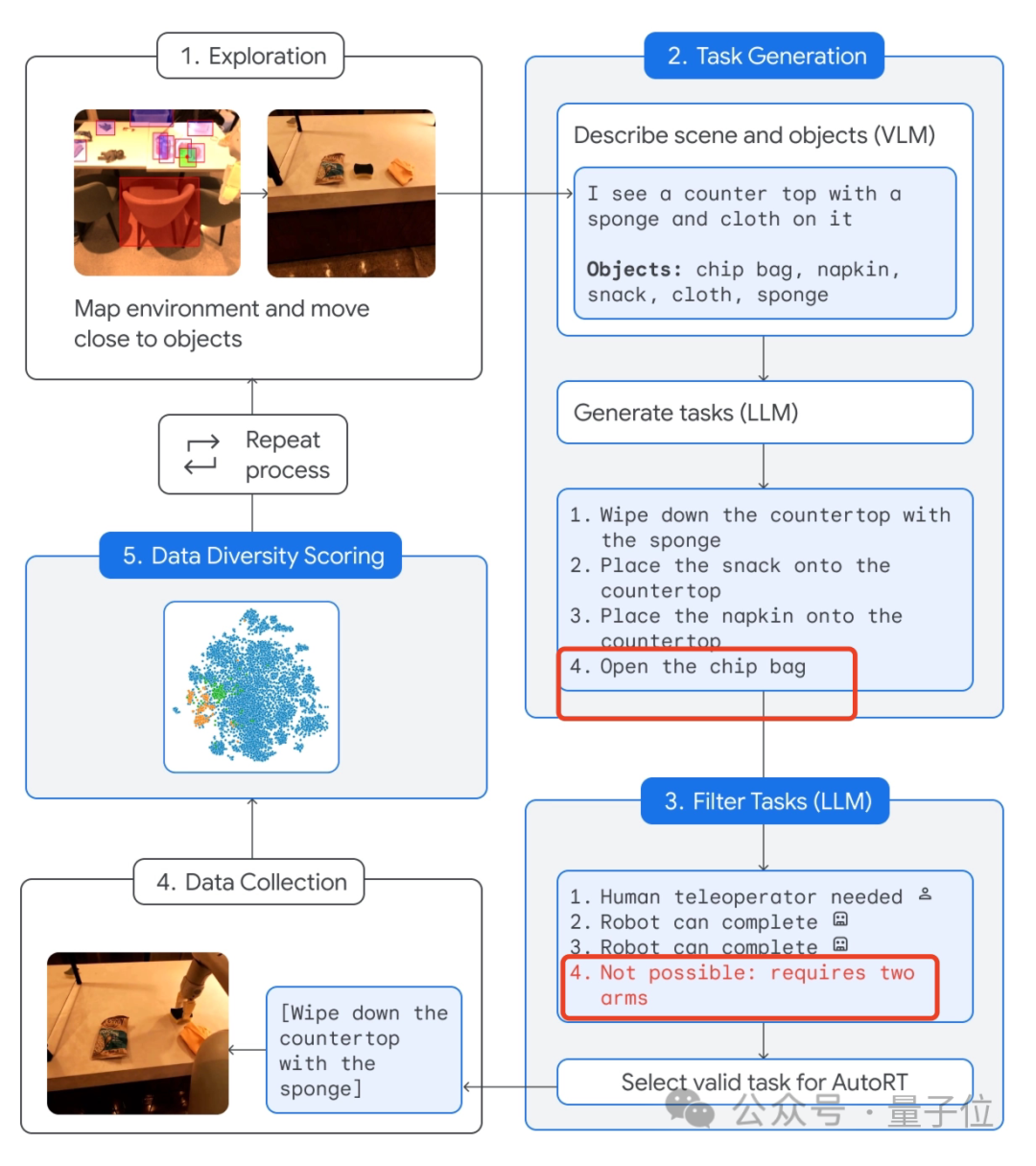
Nach Abschluss dieser Screening-Aufgabe kann der Roboter sie dann tatsächlich ausführen.
Schließlich schließt das AutoRT-System die Datenerfassung ab und führt eine Diversitätsbewertung durch.
Berichten zufolge kann AutoRT bis zu 20 Roboter gleichzeitig koordinieren. In 7 Monaten wurden insgesamt 77.000 Testdaten, darunter 6.650 einzigartige Aufgaben, gesammelt.
Schließlich legt Google bei diesem System auch Wert auf Sicherheit.
Schließlich gelten die Erfassungsaufgaben von AutoRT für die reale Welt und „Sicherheitsleitplanken“ sind unverzichtbar.
Konkret ist der vom LLM bereitgestellte Basic Safety Code, der Roboter auf Aufgaben überprüft, teilweise von Isaac Asimovs Drei Gesetzen der Robotik inspiriert – in erster Linie „Ein Roboter darf einem Menschen keinen Schaden zufügen.“
Die zweite Anforderung lautet dass der Roboter keine Aufgaben ausführen darf, an denen Menschen, Tiere, scharfe Gegenstände oder Elektrogeräte beteiligt sind
Aber das reicht nicht aus
Daher ist AutoRT auch in der regulären Robotik mit mehreren Ebenen praktischer Sicherheitsmaßnahmen ausgestattet. Beispielsweise stoppt der Roboter automatisch, wenn die Kraft auf seine Gelenke überschreitet einen bestimmten Schwellenwert, alle Aktionen können durch physische Schalter gestoppt werden, die im menschlichen Sichtfeld bleiben, und mehr
 Möchten Sie mehr über diese neuesten Ergebnisse von Google erfahren
Möchten Sie mehr über diese neuesten Ergebnisse von Google erfahren
Gute Neuigkeiten, außer für RT-Trajectory, das nur Artikel veröffentlicht, wird der Rest zusammen mit dem Code und den Artikeln veröffentlicht. Sie können gerne nach weiteren ~
One More Thing
Apropos Google-Robotern suchen, wir müssen
RT-2erwähnen (Alle Ergebnisse dieses Artikels basieren auch darauf) Die Erstellung dieses Modells dauerte 7 Monate und wurde Ende Juli dieses Jahres veröffentlicht.
Es bettet das visuelle Text-Multimodal ein Modell VLM kann nicht nur „menschliche Wörter“ verstehen, sondern auch über „menschliche Wörter“ nachdenken und einige Aufgaben ausführen, die nicht in einem Schritt erledigt werden können, wie zum Beispiel das genaue Aufsammeln „ausgestorbener Tiere“ aus drei Plastikspielzeugen: Löwen, Wale und Dinosaurier. ", sehr erstaunlich.Jetzt, in etwas mehr als 5 Monaten, hat es schnelle Verbesserungen in der Verallgemeinerungsfähigkeit und der Entscheidungsgeschwindigkeit erlebt. Wir können nicht anders, als zu seufzen: Ich kann es mir nicht vorstellen dass ein Roboter wirklich in die Welt stürmt. Wie schnell wird er für Tausende von Haushalten sein?
Das obige ist der detaillierte Inhalt vonDer DeepMind-Roboter von Google hat drei Ergebnisse in Folge veröffentlicht! Beide Funktionen wurden vollständig verbessert und das Datenerfassungssystem kann 20 Roboter gleichzeitig verwalten.. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Laravels Geospatial: Optimierung interaktiver Karten und großen Datenmengen
Apr 08, 2025 pm 12:24 PM
Laravels Geospatial: Optimierung interaktiver Karten und großen Datenmengen
Apr 08, 2025 pm 12:24 PM
Verarbeiten Sie 7 Millionen Aufzeichnungen effizient und erstellen Sie interaktive Karten mit Geospatial -Technologie. In diesem Artikel wird untersucht, wie über 7 Millionen Datensätze mithilfe von Laravel und MySQL effizient verarbeitet und in interaktive Kartenvisualisierungen umgewandelt werden können. Erstes Herausforderungsprojektanforderungen: Mit 7 Millionen Datensätzen in der MySQL -Datenbank wertvolle Erkenntnisse extrahieren. Viele Menschen erwägen zunächst Programmiersprachen, aber ignorieren die Datenbank selbst: Kann sie den Anforderungen erfüllen? Ist Datenmigration oder strukturelle Anpassung erforderlich? Kann MySQL einer so großen Datenbelastung standhalten? Voranalyse: Schlüsselfilter und Eigenschaften müssen identifiziert werden. Nach der Analyse wurde festgestellt, dass nur wenige Attribute mit der Lösung zusammenhängen. Wir haben die Machbarkeit des Filters überprüft und einige Einschränkungen festgelegt, um die Suche zu optimieren. Kartensuche basierend auf der Stadt
 Wie man MySQL löst, kann nicht gestartet werden
Apr 08, 2025 pm 02:21 PM
Wie man MySQL löst, kann nicht gestartet werden
Apr 08, 2025 pm 02:21 PM
Es gibt viele Gründe, warum MySQL Startup fehlschlägt und durch Überprüfung des Fehlerprotokolls diagnostiziert werden kann. Zu den allgemeinen Ursachen gehören Portkonflikte (prüfen Portbelegung und Änderung der Konfiguration), Berechtigungsprobleme (Überprüfen Sie den Dienst Ausführen von Benutzerberechtigungen), Konfigurationsdateifehler (Überprüfung der Parametereinstellungen), Datenverzeichniskorruption (Wiederherstellung von Daten oder Wiederaufbautabellenraum), InnoDB-Tabellenraumprobleme (prüfen IBDATA1-Dateien), Plug-in-Ladeversagen (Überprüfen Sie Fehlerprotokolle). Wenn Sie Probleme lösen, sollten Sie sie anhand des Fehlerprotokolls analysieren, die Hauptursache des Problems finden und die Gewohnheit entwickeln, Daten regelmäßig zu unterstützen, um Probleme zu verhindern und zu lösen.
 So verwenden Sie MySQL nach der Installation
Apr 08, 2025 am 11:48 AM
So verwenden Sie MySQL nach der Installation
Apr 08, 2025 am 11:48 AM
Der Artikel führt den Betrieb der MySQL -Datenbank vor. Zunächst müssen Sie einen MySQL -Client wie MySQLworkBench oder Befehlszeilen -Client installieren. 1. Verwenden Sie den Befehl mySQL-uroot-P, um eine Verbindung zum Server herzustellen und sich mit dem Stammkonto-Passwort anzumelden. 2. Verwenden Sie die Erstellung von Createdatabase, um eine Datenbank zu erstellen, und verwenden Sie eine Datenbank aus. 3.. Verwenden Sie CreateTable, um eine Tabelle zu erstellen, Felder und Datentypen zu definieren. 4. Verwenden Sie InsertInto, um Daten einzulegen, Daten abzufragen, Daten nach Aktualisierung zu aktualisieren und Daten nach Löschen zu löschen. Nur indem Sie diese Schritte beherrschen, lernen, mit gemeinsamen Problemen umzugehen und die Datenbankleistung zu optimieren, können Sie MySQL effizient verwenden.
 Kann MySQL JSON zurückgeben?
Apr 08, 2025 pm 03:09 PM
Kann MySQL JSON zurückgeben?
Apr 08, 2025 pm 03:09 PM
MySQL kann JSON -Daten zurückgeben. Die JSON_EXTRACT -Funktion extrahiert Feldwerte. Über komplexe Abfragen sollten Sie die Where -Klausel verwenden, um JSON -Daten zu filtern, aber auf die Leistungsauswirkungen achten. Die Unterstützung von MySQL für JSON nimmt ständig zu, und es wird empfohlen, auf die neuesten Versionen und Funktionen zu achten.
 Remote Senior Backend Engineers (Plattformen) benötigen Kreise
Apr 08, 2025 pm 12:27 PM
Remote Senior Backend Engineers (Plattformen) benötigen Kreise
Apr 08, 2025 pm 12:27 PM
Remote Senior Backend Engineer Job Vacant Company: Circle Standort: Remote-Büro-Jobtyp: Vollzeitgehalt: 130.000 bis 140.000 US-Dollar Stellenbeschreibung Nehmen Sie an der Forschung und Entwicklung von Mobilfunkanwendungen und öffentlichen API-bezogenen Funktionen, die den gesamten Lebenszyklus der Softwareentwicklung abdecken. Die Hauptaufgaben erledigen die Entwicklungsarbeit unabhängig von RubyonRails und arbeiten mit dem Front-End-Team von React/Redux/Relay zusammen. Erstellen Sie die Kernfunktionalität und -verbesserungen für Webanwendungen und arbeiten Sie eng mit Designer und Führung während des gesamten funktionalen Designprozesses zusammen. Fördern Sie positive Entwicklungsprozesse und priorisieren Sie die Iterationsgeschwindigkeit. Erfordert mehr als 6 Jahre komplexes Backend für Webanwendungen
 Verstehen von Säureeigenschaften: Die Säulen einer zuverlässigen Datenbank
Apr 08, 2025 pm 06:33 PM
Verstehen von Säureeigenschaften: Die Säulen einer zuverlässigen Datenbank
Apr 08, 2025 pm 06:33 PM
Detaillierte Erläuterung von Datenbanksäureattributen Säureattribute sind eine Reihe von Regeln, um die Zuverlässigkeit und Konsistenz von Datenbanktransaktionen sicherzustellen. Sie definieren, wie Datenbanksysteme Transaktionen umgehen, und sorgen dafür, dass die Datenintegrität und -genauigkeit auch im Falle von Systemabstürzen, Leistungsunterbrechungen oder mehreren Benutzern gleichzeitiger Zugriff. Säureattributübersicht Atomizität: Eine Transaktion wird als unteilbare Einheit angesehen. Jeder Teil schlägt fehl, die gesamte Transaktion wird zurückgerollt und die Datenbank behält keine Änderungen bei. Wenn beispielsweise eine Banküberweisung von einem Konto abgezogen wird, jedoch nicht auf ein anderes erhöht wird, wird der gesamte Betrieb widerrufen. begintransaktion; updateAccountsSetBalance = Balance-100WH
 MySQL kann nach dem Herunterladen nicht installiert werden
Apr 08, 2025 am 11:24 AM
MySQL kann nach dem Herunterladen nicht installiert werden
Apr 08, 2025 am 11:24 AM
Die Hauptgründe für den Fehler bei MySQL -Installationsfehlern sind: 1. Erlaubnisprobleme, Sie müssen als Administrator ausgeführt oder den Sudo -Befehl verwenden. 2. Die Abhängigkeiten fehlen, und Sie müssen relevante Entwicklungspakete installieren. 3. Portkonflikte müssen Sie das Programm schließen, das Port 3306 einnimmt, oder die Konfigurationsdatei ändern. 4. Das Installationspaket ist beschädigt. Sie müssen die Integrität herunterladen und überprüfen. 5. Die Umgebungsvariable ist falsch konfiguriert und die Umgebungsvariablen müssen korrekt entsprechend dem Betriebssystem konfiguriert werden. Lösen Sie diese Probleme und überprüfen Sie jeden Schritt sorgfältig, um MySQL erfolgreich zu installieren.
 Der Hauptschlüssel von MySQL kann null sein
Apr 08, 2025 pm 03:03 PM
Der Hauptschlüssel von MySQL kann null sein
Apr 08, 2025 pm 03:03 PM
Der MySQL -Primärschlüssel kann nicht leer sein, da der Primärschlüssel ein Schlüsselattribut ist, das jede Zeile in der Datenbank eindeutig identifiziert. Wenn der Primärschlüssel leer sein kann, kann der Datensatz nicht eindeutig identifiziert werden, was zu Datenverwirrung führt. Wenn Sie selbstsinkrementelle Ganzzahlsspalten oder UUIDs als Primärschlüssel verwenden, sollten Sie Faktoren wie Effizienz und Raumbelegung berücksichtigen und eine geeignete Lösung auswählen.
