
 Technologie-Peripheriegeräte
KI
Apollo arbeitet mit Carsim/TruckSim für gemeinsame Simulationen zusammen
Technologie-Peripheriegeräte
KI
Apollo arbeitet mit Carsim/TruckSim für gemeinsame Simulationen zusammen
Apollo arbeitet mit Carsim/TruckSim für gemeinsame Simulationen zusammen

1. Hintergrund
Simulation spielt eine wichtige Rolle in der Forschung und Entwicklung zum autonomen Fahren. Sie kann die Effizienz von Forschung und Entwicklung erheblich verbessern und eine Garantie für die Zuverlässigkeit von Algorithmen bieten. Als hervorragende Open-Source-Plattform eignet sich das Baidu Apollo-System sehr gut für die Forschung von Freunden, die daran interessiert sind, autonomes Fahren zu erlernen. Darüber hinaus ist Carsim/Trucksim ein hoch angesehenes klassisches Fahrzeugdynamik-Simulationstool.
In diesem Artikel wird die Methode zur Realisierung einer lokalen Echtzeitsimulation durch die Kombination von Apollo und Trucksim vorgestellt. Es ist für Anfänger geeignet, eine Simulationsplattform aufzubauen und das Apollo-System zu studieren.
2. Architekturdesign
Der Kerncode des Apollo-Projekts ist in C++ implementiert. Zu den gängigen Schnittstellen für Trucksim gehören Simulink, Python und die Programmiersprache C. In diesem Artikel wird zunächst die Architektur der gemeinsamen Simulation von Apollo, Simulink und Trucksim vorgestellt und die in diesem Simulationssystem bestehenden Probleme erörtert. Als nächstes konzentrieren wir uns auf die gemeinsame Simulation von Apollo und Trucksim.
2.1 Apollo-, Simulink- und Trucksim-Lösungen
Simulink und Apollo können über ROS kommunizieren. Da das Nachrichtendatenformat von Apollo protobuf ist und das ROS-Tool von Simulink nur Standard-ROS-Nachrichten (ROS msg) unterstützt, kann Apollo ein Formatkonvertierungsknoten hinzugefügt werden, um Kompatibilität zu erreichen. Bezüglich der Lösung von Simulink, die Trucksim aufruft, gibt es im Internet viele Referenzquellen, daher werde ich nicht auf Details eingehen.
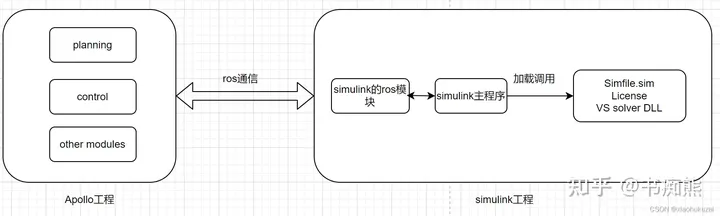
Simulink-Lösungsdiagramm
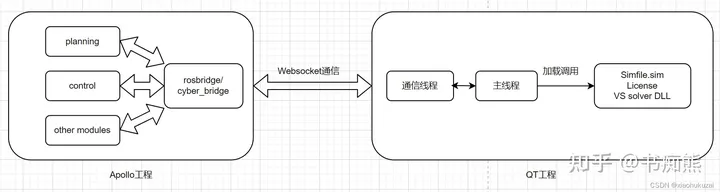
2.2 Apollo-, Rosbridge- und Trucksim-Lösungen
Stellen Sie eine Websocket-Kommunikation zwischen QT-Projekt und Apollo-Projekt her. Im Apollo-Projekt wird die gegenseitige Konvertierung zwischen Ros-Nachrichten (oder Cyber-Nachrichten) und Websockets durch Hinzufügen des Moduls Rosbridge (oder Cyber_Bridge) realisiert. Das QT-Projekt ist in C++ als Websocket-Client implementiert und ruft die dynamische Bibliothek von Trucksim auf, um die Funktion der Ausführung von Trucksim in Echtzeit zu realisieren. 3. Funktionsimplementierung in Abbildung 2. Hostname/IP-Adresse und Port sind die Adresse bzw. Portnummer von ROS_MASTER_URI, die im obigen Kommunikationsmechanismus erläutert werden.
Konfigurieren Sie die ROS-Netzwerkadresse
ROS-Abonnent empfängt Nachrichten von der Schnittstelle, daher müssen Thema, Nachrichtentyp und Abtastzeit dem Programm in der Schnittstelle entsprechen.
Ros-Abonnement konfigurierenUm das Debuggen und die Überprüfung zu erleichtern, starten Sie jetzt ROS auf der MATLAB-Seite. Der Konfigurationsprozess ist wie folgt:
MATLAB-Einstellungsanweisungen:>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')3.1.2 TruckSim-Konfiguration 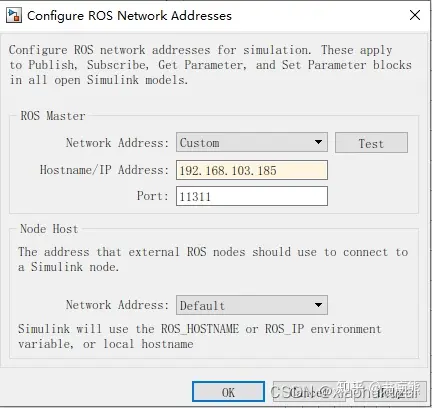
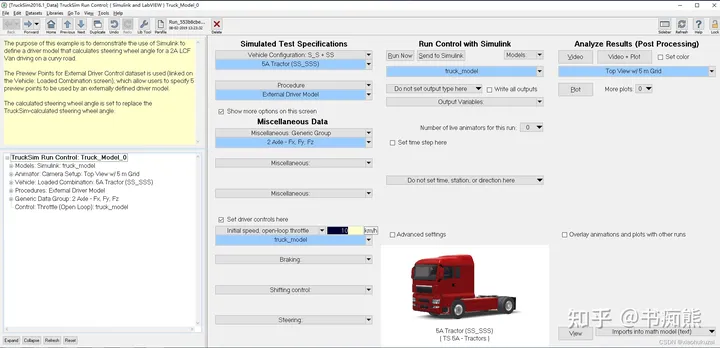
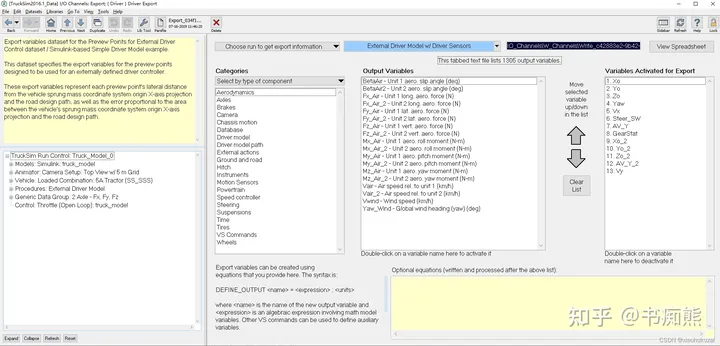
Trucksim ist eine assistentenbasierte Programmier- und Parameterkonfigurationsschnittstelle: Truck Select 5A Tractor (SS_SSS) , siehe die spezifischen Parameter Abbildung 3. Steuerschnittstelle: Wählen Sie Simulink für Modelle. 
Hauptschnittstelle
Eingabeparameter-Konfigurationsschnittstelle
Ausgabeparameter-Konfigurationsschnittstelle
3.2 Apollo-, Rosbridge- und Trucksim-Lösungen
 3.2.1 Rosbridge in Apollo konfigurieren
3.2.1 Rosbridge in Apollo konfigurieren
 Die Verwendung ist wie folgt:
Die Verwendung ist wie folgt:
cd ros_pkgs_ws
catkin_make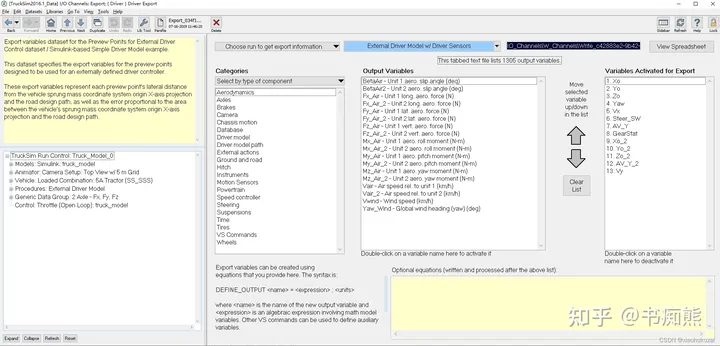
rosla unch rosbridge_server rosbridge_websocket .launch
3.2.1 Qt-Projektkonfigurationsanweisungen
3.2.1.1 Qt- und CMake-Versionsinformationen3.2.1.3 Schnittstellendefinition von Apollo-Projekt und QT-Projekt
/ Apollo/Trucksim /pose{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
Das obige ist der detaillierte Inhalt vonApollo arbeitet mit Carsim/TruckSim für gemeinsame Simulationen zusammen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1392
1392
 52
52

 Empfehlen Sie mehrere Apps, um Mainstream -Münzen in der letzten Veröffentlichung 2025 zu kaufen
Apr 21, 2025 pm 11:54 PM
Empfehlen Sie mehrere Apps, um Mainstream -Münzen in der letzten Veröffentlichung 2025 zu kaufen
Apr 21, 2025 pm 11:54 PM
Die App -Software, die Mainstream -Münzen kaufen kann, umfasst: 1. Binance, das weltweit führende Transaktionsvolumen und schnelle Geschwindigkeit; 2. OKX, innovative Produkte, niedrige Gebühren, hohe Sicherheit; 3.. Gate.io, eine Vielzahl von Vermögenswerten und Handelsoptionen, die sich auf die Sicherheit konzentrieren; 4. Huobi (HTX), niedrige Gebühren, gute Benutzererfahrung; 5. Coinbase, geeignet für Anfänger, hohe Sicherheit; 6. Kraken, sicher und konform, eine Vielzahl von Dienstleistungen; 7. Kucoin, niedrige Gebühren, geeignet für professionelle Händler; 8. Gemini betont die Compliance und bietet Depotdienste an; 9. Crypto.com, die eine Vielzahl von Angeboten und Dienstleistungen bietet; 10. Bitstamp, ein alter Austausch, starke Liquidität,
 Empfohlene essentielle Software für Währungsvertragsfeiern
Apr 21, 2025 pm 11:21 PM
Empfohlene essentielle Software für Währungsvertragsfeiern
Apr 21, 2025 pm 11:21 PM
Die Top Ten Cryptocurrency Contract Exchange -Plattformen im Jahr 2025 sind: 1. Binance -Futures, 2. OKX Futures, 3. Gate.io, 4. Huobi -Futures, 5. Bitmex, 6. Bybit, 7. Deribit, 8. Bitfinex, 9. Coinflex, 10. Phemex, diese Plattformen, die sich für ihre hohen Liquidität und Starten versiegen.
 Rangliste der Hebelbörsen im Währungskreis Die neuesten Empfehlungen der zehn meistgezogenen Börsen im Währungskreis
Apr 21, 2025 pm 11:24 PM
Rangliste der Hebelbörsen im Währungskreis Die neuesten Empfehlungen der zehn meistgezogenen Börsen im Währungskreis
Apr 21, 2025 pm 11:24 PM
Die Plattformen, die im Jahr 2025 im Leveraged Trading, Security und Benutzererfahrung hervorragende Leistung haben, sind: 1. OKX, geeignet für Hochfrequenzhändler und bieten bis zu 100-fache Hebelwirkung; 2. Binance, geeignet für Mehrwährungshändler auf der ganzen Welt und bietet 125-mal hohe Hebelwirkung; 3. Gate.io, geeignet für professionelle Derivate Spieler, die 100 -fache Hebelwirkung bietet; 4. Bitget, geeignet für Anfänger und Sozialhändler, die bis zu 100 -fache Hebelwirkung bieten; 5. Kraken, geeignet für stetige Anleger, die fünfmal Hebelwirkung liefert; 6. Bybit, geeignet für Altcoin -Entdecker, die 20 -fache Hebelwirkung bietet; 7. Kucoin, geeignet für kostengünstige Händler, die 10-fache Hebelwirkung bietet; 8. Bitfinex, geeignet für das Seniorenspiel
 Welcher Bitcoin -Futures -Austausch ist global?
Apr 21, 2025 pm 11:18 PM
Welcher Bitcoin -Futures -Austausch ist global?
Apr 21, 2025 pm 11:18 PM
Die fünf wichtigsten Bitcoin -Futures -Börsen -Ranglisten sind: 1. CME Group: Die vertrauenswürdigste der Welt, die institutionelle Investoren anzieht und eine starke Konformität haben. 2. Coinbase: Speziell für Einzelhandelsinvestoren, die 13 Futures -Verträge mit hoher Benutzerfreundlichkeit anbietet; 3. Binance: hohe Hebelwirkung, gute Liquidität und großes Benutzervolumen; 4. OKX: Großes kumulatives Handelsvolumen, professionelle Schnittstelle und vollständiges Risikomanagement; 5. Kraken: hohe Sicherheit, geeignet für europäischen Markt und institutionelle Kunden.
 Ouyi ouyi ouyi ouix ouyi Global Station Anmelde Homepage
Apr 21, 2025 pm 11:57 PM
Ouyi ouyi ouyi ouix ouyi Global Station Anmelde Homepage
Apr 21, 2025 pm 11:57 PM
Ouyi OKX ist die weltweit führende digitale Vermögenshandelsplattform. 1) Seine Entwicklungsgeschichte umfasst: Sie wird 2017 ins Leben gerufen. Der chinesische Name "Ouyi" wird 2021 eingeführt und wird 2022 in Ouyi in OKX umbenannt. 3) Zu den speziellen Funktionen der Plattform gehören: Marktdatendienste und Risikokontrollsystem. 4) Zu den Hauptvorteilen gehören: technische Stärke, Sicherheitssystem, Serviceunterstützung und Marktabdeckung.
 Currency Circle Contract Trading Platform Ranking 2025
Apr 21, 2025 pm 11:15 PM
Currency Circle Contract Trading Platform Ranking 2025
Apr 21, 2025 pm 11:15 PM
Hier sind die zehn wichtigsten Kryptowährungs -Futures -Börsen der Welt: 1. Binance Futures: Bietet eine Fülle von Vertragsprodukten, niedrigen Gebühren und hohe Liquidität. 2. OKX: Unterstützt mehrere Währungstransaktionen unter Verwendung der SSL -Verschlüsselung und des Kaltbrieftaschenspeichers. 3. Huobi -Futures: Bekannt für seine stabile Plattform und seinen guten Service bietet es Bildungsressourcen. 4. Gate.io: Innovative Vertragsprodukte und hohe Liquidität, aber FTX war bankrott. 5. Deribit: Konzentrieren Sie sich auf Optionen und ewige Verträge und bieten professionelle Handelsinstrumente. 6. Coinflex: Bietet tokenisierte Futures -Verträge und Governance Tokens Flex. 7. Phemex: Bis zu 100 -mal Hebel, niedrige Transaktionsgebühren und innovative Verträge. 8. b
 Quantenkettenaustausch -Ranking Top 10 empfohlen (aktualisiert im Jahr 2025)
Apr 21, 2025 pm 11:48 PM
Quantenkettenaustausch -Ranking Top 10 empfohlen (aktualisiert im Jahr 2025)
Apr 21, 2025 pm 11:48 PM
Quantenketten können an folgenden Börsen gehandelt werden: 1. Binance: Einer der größten Börsen der Welt mit großem Handelsvolumen, reichhaltiger Währung und hoher Sicherheit. 2. Sesam Open Door (Gate.io): Eine große Börse, die eine Vielzahl von Transaktionen für digitale Währung mit guter Handelstiefe bietet. 3.. Ouyi (OKX): Betrieben von OK Group, mit starker umfassender Stärke, großer Transaktionsvolumen und vollständigen Sicherheitsmaßnahmen. 4. Bitget: Schnelle Entwicklung, bietet Quantenkettentransaktionen und verbessert die Sicherheit. 5. Bithumb: In Japan betrieben, unterstützt Transaktionen mehrerer virtueller Mainstream -Währungen und ist sicher und zuverlässig. 6. Matcha Exchange: Ein bekannter Austausch mit einer freundlichen Schnittstelle und unterstützt den Quantenkettenhandel. 7. Huobi: Eine große Börse, die den Quantenkettenhandel liefert,
 Der beste Kryptowährungsaustausch der Welt im Jahr 2025: Top -Empfehlungen
Apr 21, 2025 pm 10:39 PM
Der beste Kryptowährungsaustausch der Welt im Jahr 2025: Top -Empfehlungen
Apr 21, 2025 pm 10:39 PM
The best cryptocurrency exchanges in the world in 2025 are: 1. Binance, 2. Coinbase, 3. OkX, 4. Kraken, 5. KuCoin, 6. Bitget, 7. Bybit, 8. Gemini, 9. Crypto.com, 10. MEXC Matcha Exchange, these exchanges perform well in security, user experience, trading fees, currency selection, trading functions, compliance, innovation capabilities und globale Abdeckung und eignen sich für Anleger mit unterschiedlichen Bedürfnissen.
