1. Hintergrund
Als ich kürzlich erzählte, wie sich High-Tech-Unternehmen in den Bereich des autonomen Fahrens verwandelt haben, stellten mir mehrere Freunde die gleiche Frage: „Welche Positionen gibt es für autonomes Fahren der Klassen L2–L4? Welchen konkreten Job?“ Entspricht es dem Inhalt?
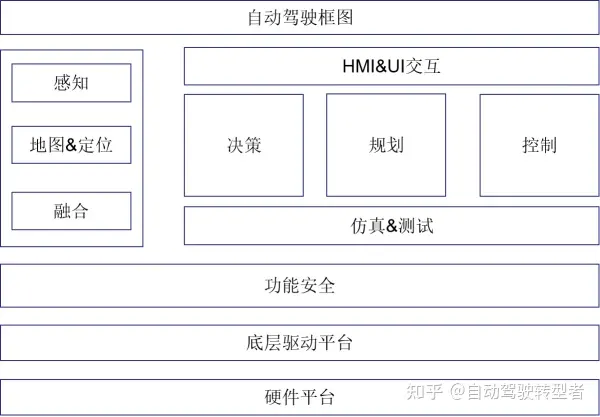
Lassen Sie uns zunächst das Systemblockdiagramm des autonomen Fahrens (vereinfachte Version) vorstellen, um jedem ein Gesamtkonzept des autonomen Fahrens zu vermitteln.

- Als nächstes werden wir es in zwei Kategorien einteilen: Algorithmusingenieure und Nicht-Algorithmusingenieure. „Algorithmus-Ingenieur“ al Sprachverarbeitungsalgorithmus-Ingenieur
- Entscheidung Algorithmus-IngenieurPlanungsalgorithmus-Ingenieur
Steuerungsalgorithmus-Ingenieur
-
- Nicht-Algorithmus-Ingenieur
-
-
- Softwareplattform-Entwicklungsingenieur
- Systemingenieur
- Funktionssicherheitsingenieur
- Kalibrierungsingenieur
- Simulationsumgebungsingenieur
Testingenieur
- DateningenieurUI-Entwicklungsingenieur
- Das Folgende ist eine detaillierte Einführung in die beruflichen Verantwortlichkeiten und Inhalte, die zum Lernen für jede Position erforderlich sind
-
- 2. Algorithmusingenieur
-
- 2.1. Laser-SLAM-Algorithmus Ingenieur
-
-
-
Berufseinführung:
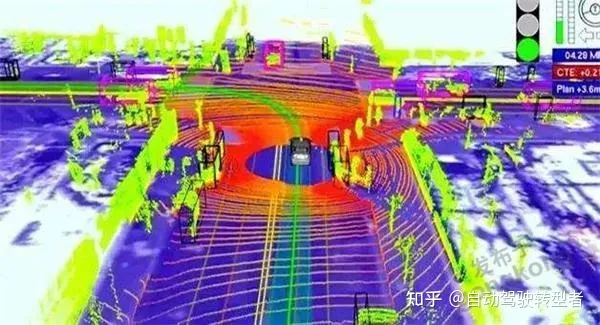
- Lasersensordaten sammeln und anhand von Punktwolkendaten eine Karte der Umgebung des autonomen Fahrzeugs erstellen.
Verantwortlich für das Design und die Entwicklung von SLAM-Algorithmen auf Basis von Lasersensoren, die hochpräzise Karten aktualisieren und erstellen können, die verschiedene komplexe Szenen abdecken.
Fähigkeitsanforderungen:
Verwenden Sie C-, C++-Programmierung;
Erfordern Sie Kenntnisse über Filteralgorithmen: ESKF, EKF, UKF usw.;
Gleichzeitig müssen Sie G2O, Ceres und andere C++-Frameworks erlernen Wird zur Optimierung nichtlinearer Fehlerfunktionen verwendet.
- FAVELITY MIT Open Source SLAM -Frameworks wie Gloam, Kimera, Vins usw. wird bevorzugt; Entwicklung autonomer Navigations- und Positionierungsalgorithmen für Roboter, einschließlich der Erstellung von Roboterbewegungsmodellen basierend auf Lidar, Gyroskop, Odometrie, Vision und anderer Informationsfusion
Fähigkeitsanforderungen:-
- Lernen Sie häufig verwendete VSLAM-Algorithmen wie ORB-SLAM, SVO, DSO, MonoSLAM, VINS und RGB-D usw.;
- ROS-Roboter-Betriebssystem; Erfordert Kenntnisse über Filteralgorithmen: ESKF, EKF, UKF usw.;
- Gleichzeitig müssen Sie G2O lernen, ceres und andere C++-Frameworks zur Optimierung nichtlinearer Fehlerfunktionen.
-
- 2.3. Ingenieur für Multisensor-Fusionsalgorithmen
-
- Berufseinführung:
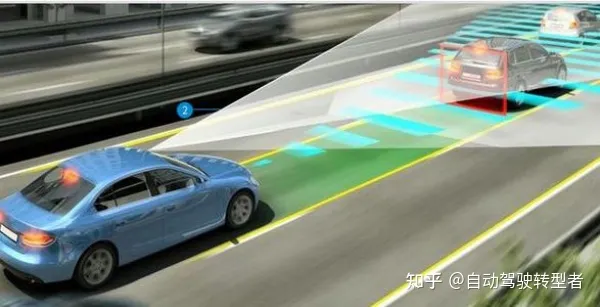
- Informationen von mehreren Sensoren wie Kameras, Lidar und Millimeterwellenradar verarbeiten und zusammenführen, um die Umgebungswahrnehmungsfähigkeiten autonomer Fahrfahrzeuge zu verbessern;
- Verantwortlich für die Zielerkennung, -verfolgung und -verfolgung zur Identifizierung und Positionierung von Informationen aus mehreren Quellen;
- Fähigkeitsanforderungen:
-
Beherrschen Sie Kamera, Millimeterwellenradar, Lidar, Trägheitsnavigation und andere verwandte Datenanalyse- und Fusionsalgorithmen;
- Bachelor-Abschluss oder höher in Computerinformatik, Elektrotechnik oder mathematisch verwandten Hauptfächern mit solider Computerkompetenz Theorie Grundkenntnisse
- Präzisionskameramodell, multivisuelle Geometrie, Bündelanpassungsprinzipien, Erfahrung in SfM, geometrischer Bereichswahl und anderen Projekten
- Kompetent in C/C++, vertraut mit Matlab, gute objektorientierte Programmierideen und Codierungsgewohnheiten
- Vertraut mit IMU, GPS, DR und anderen Trägheitsnavigationsalgorithmus-Frameworks.
- Vertraut mit IMU, GPS, Körpersystemprinzipien, Hardwareeigenschaften, Kalibrierungsalgorithmen
Diese Richtung ist hauptsächlich für das Fahren von Fahrzeugen verantwortlich. Die Anwendung der dabei generierten Daten im Ingenieurwesen ist auf die Richtung der Datenanalyse ausgerichtet, z. B. auf die Auswirkungsanalyse der Fahrzeugkilometer, die Modellierung von Big-Data-Analysen usw. -
Fähigkeitsanforderungen:
Python, C/C++
Erlernen Sie grundlegende theoretische Algorithmen des maschinellen Lernens wie LR, GBDT, SVM, DNN usw.; - Erlernen Sie das Modelltraining traditioneller Frameworks für maschinelles Lernen wie Scikit -lernen;
Vertraut mit Deep-Learning-Frameworks wie PyTorch, TensorFlow (teilweise auf neuronalen Netzen) usw. 2.5. Computer-Vision-Algorithmus-Ingenieur Ampeln Warten auf die Erkennung von Verkehrsinformationen usw. -
- Fähigkeitsanforderungen:
C/C++, Python, OpenCV; - Erfordern grundlegende Algorithmen des maschinellen Lernens (Dimensionalitätsreduzierung, Klassifizierung, Regression usw.);
- Müssen Sie Deep Learning und Deep Learning Framework erlernen?
Lernen Sie Computer mit gängigen Methoden der Seh- und Bildverarbeitung (Objekterkennung, Verfolgung, Segmentierung, Klassifizierungserkennung usw.). 2.6. Ingenieur für natürliche Sprachverarbeitungsalgorithmen Algorithmus für maschinelles Lernen, Deep-Learning-Algorithmus (RNN); - Grundlegende Aufgaben der Verarbeitung natürlicher Sprache (Wortsegmentierung, Teil-of-Speech-Tagging, syntaktische Analyse, Schlüsselwortextraktion)
- Muss maschinelle Lernmethoden wie Clustering, Klassifizierung, Regression, Sortierung und andere Modelle zur Lösung von Textgeschäftsproblemen;
Vertraut mit Deep-Learning-Frameworks wie PyTorch, TensorFlow (teilweise RNN-Teil) usw. 2.7 Entscheidungsalgorithmus-Ingenieur Beispielsweise sind Fahrzeugbeschleunigung, -verzögerung, Linksabbiegen, Rechtsabbiegen, Spurwechsel und Überholen allesamt Ausgaben des Entscheidungsmoduls. Bei Entscheidungen müssen die Sicherheit und der Komfort des Fahrzeugs berücksichtigt werden, um die Sicherheit der Passagiere zu gewährleisten und das Ziel so schnell wie möglich zu erreichen.
Fähigkeitsanforderungen:
c/c++/python, vertraut mit dem ROS-System;
- Erlernen Sie häufig verwendete Entscheidungsalgorithmen wie Entscheidungszustandsmaschinen, Entscheidungsbäume, Markov-Entscheidungsprozesse, POMDP usw.; Wenn Sie tiefer gehen möchten, müssen Sie mit maschinellen Lernalgorithmen (RNN, LSTM, RL) vertraut sein und mindestens ein Deep-Learning-Framework beherrschen (z. B. Gym oder Universe und andere Deep-Reinforcement-Learning-Plattformen). Sie sind mit Fahrzeugkinematik- und Dynamikmodellen vertraut.
-
- 2.8. Planungsalgorithmus-Ingenieur
-
-
-
- Berufseinführung:
- Die Planung umfasst Pfadplanung und Geschwindigkeitsplanung
- Im Planungsalgorithmus ermittelt das autonome Fahrzeug zunächst durch Pfadplanung den Pfad, den das Fahrzeug zurücklegen kann, und wählt dann den Pfad aus, um die fahrbare Geschwindigkeit zu bestimmen.
- Fähigkeitsanforderungen:
- c/c++/python, ROS-Roboter-Betriebssystem; (einige Unternehmen werden mit Matlab/Simulink entwickelt)
- Lernen Sie gängige Pfadplanungsalgorithmen wie A, D, RRT usw.;
Erlernen Sie einige Kurvendarstellungsmethoden, wie zum Beispiel: Quintkurve, Klothoide, kubischer Spline, B-Spline usw.; - Wenn Sie tiefergehende Kenntnisse erlangen möchten, lernen Sie Algorithmen zur Flugbahnvorhersage wie MDP, POMDP, Came-Theorie usw. kennen .;
-
Das Erlernen von Deep-Learning- und Reinforcement-Learning-Technologien ist ebenfalls von Vorteil, wie z. -
- 2.9. Steuerungsalgorithmus-Ingenieur
- Berufseinführung:
- Im Allgemeinen wird es verwendet, um die horizontale und vertikale Dynamik des Fahrzeugs zu modellieren und dann Steuerungsalgorithmen zu entwickeln, um die Fahrzeugbewegungssteuerung usw. zu realisieren.
- Diese Position hat mehr mit Fahrzeugen zu tun. und ist für traditionelle Automobilhersteller geeignet, in den Bereich des autonomen Fahrens zu wechseln. Für Partner ist es eine gute Einstiegsmöglichkeit.
- Fähigkeitsanforderungen:
- C/C++, Matlab/Simulink
- Lernen Sie die Grundlagen der automatischen Steuerungstheorie und der modernen Steuerungstheorie;
- Lernen Sie PID-, LQR- und MPC-Algorithmen;
- Lernen Sie Fahrzeugkinematik- und Dynamikmodelle ein gewisses Verständnis für das Fahrwerk des Autos;
- Simulationssoftware wie CarSim erlernen;
- Die Entwicklung von Zusatzfahrfunktionen wie ACC, AEB, APA, LKA, LCC usw. ist ein Bonus; Erfahrung ist auch ein Bonus. 3. Nicht-Algorithmus-Ingenieur Middleware-Implementierung/-Verbesserung, Systemintegration, Leistungs-/Stromverbrauchsoptimierung, Stress-/Stabilitäts-/Compliance-Tests;
- Verantwortlich für den Aufbau der Systemarchitektur und das Schreiben zugrunde liegender Treiber;
Verantwortlich für die Implementierung von Vision-bezogenen Algorithmen auf eingebetteten Prozessoren (GPUs); , DSP, ARM und andere Plattformen); Unterstützen Sie Algorithmeningenieure bei der Umsetzung, Integration, Prüfung und Optimierung von Algorithmen auf eingebetteten Plattformen.
Fähigkeitsanforderungen:
C/C++-Programmierkenntnisse, Python;
- Erfahrung in der Kernel- oder Treiberentwicklung von eingebetteten Betriebssystemen und Echtzeitbetriebssystemen, vertraut mit QNX, ROS; Vertraut mit Software-Debugging und Debugging-Tools;
- Verstehen von Fahrzeug-ADAS-Steuergeräten wie Radar, Kamera, Ultraschall und Lidar;
- Vertraut mit Kommunikationsprotokollen (CAN, UDS). , DoIP, SOME/IP, DDS, MQTT, REST usw.) ist ein Plus.
-
- 3.2. Systemingenieur
- Verantwortlich für den Aufbau des Softwaresystem-Frameworks für autonomes Fahren;
- Verantwortlich für die Modularisierung , Überprüfbares Systemsoftware-Architekturdesign und Echtzeit-Leistungsoptimierung;
- Arbeiten Sie mit Hardware-, Algorithmus- und Testteams zusammen, um autonome Fahrsysteme zu integrieren und zu optimieren.
-
- Fähigkeitsanforderungen:
- Verfügen Sie über solide theoretische Grundkenntnisse über Computer (z. B. automatische Steuerung, Mustererkennung, maschinelles Lernen, Computer Vision, Punktwolkenverarbeitung);
Verfügen Sie über den Kernel eines eingebetteten Betriebssystems und Echtzeit Erfahrung in der Betriebssystem- oder Treiberentwicklung;Gute Kommunikationsfähigkeiten und Teamfähigkeit haben
- 3.3. Ingenieur für funktionale Sicherheit
-
- Berufseinführung
:- Unterstützung der funktionalen Sicherheit des Produkts während des gesamten Produktlebenszyklus
- Verantwortlich für das funktionale Sicherheitssystemdesign von unbemannten/autonomen Fahrsystemen und Vorschläge zur Verbesserung bestehender Prozesse.
- Verantwortlich für die Gefahrenanalyse (HARA, FMEAs, FMEDA, FTA) von unbemannten/autonomen Fahrsystemen Definition von Sicherheitszielen für unbemannte/autonome Fahrsysteme;
Verantwortlich für die Definition von Sicherheitsanforderungen für unbemannte/autonome Fahrsysteme; -
- Kenntnisse in ISO26262 und Erfahrung in der Umsetzung funktionaler Sicherheitsprojekte für autonomes Fahren oder ADAS-Systeme; (Wer in der funktionalen Sicherheit in traditionellen Automobilfabriken arbeitet und sich beruflich verändern möchte, kann auch
- FMEA, FMEA-MSR, FTA und andere entsprechende Methoden verstehen)
3.4 Kalibrierungsingenieur;
- Berufsvorstellung:
Verantwortlich für die Kalibrierung von Multisensoren für autonomes Fahren, einschließlich GPS, IMU, LiDAR, Kamera, Radar und USS usw.; - Entwerfen und implementieren Sie sensorinterne und externe Parameterkalibrierungsalgorithmen , und Aufbau eines Multisensor-Kalibrierungssystems;
- Verantwortlich für relevante Fahrzeugtests der Kalibrierungsparameter, Bereitstellung eines Testberichts.
-
- Fähigkeitsanforderungen:
- C++-Programmierung, vertraut mit Linux- und ROS-Systemen;
- Erfahrung in der Sensorkalibrierung, vertraut mit visuellen oder Laser-SLAM-Algorithmen;
- 3.5 Simulationsumgebungsingenieur
-
- Berufsvorstellung:
- Diese Richtung erfordert die Mitwirkung am Aufbau autonomer Fahrsimulationssysteme, einschließlich fahrdynamikbezogener Simulationen, Modellierung und Simulation verschiedener virtueller Sensormodelle und virtueller Szenen sowie der Erstellung von Testszenarien auf der Grundlage von Testfällen
- Verantwortlich für den Aufbau eines autonomen Fahrsimulationssystems und die Durchführung von Softwaresimulationen von Autos, Sensoren und Umgebungen. Die Simulationsergebnisse werden zusammen mit realen Daten verwendet, um das Verhalten des Autos in realen Szenarien vorherzusagen.
- Kooperieren Sie mit Modulen wie Fahrentscheidungs-, Pfadplanungs- und Simulationsalgorithmen, um eine geschlossene Simulation des autonomen Fahrens zu realisieren und zu visualisieren relevante Debugging-Informationen.
- Anforderungen an Fähigkeiten:
- MATLAB/Simulink, Python/C++
- Kompetenter Umgang mit einer gängigen Simulationssoftware für Fahrzeugdynamik oder unbemannte Fahrzeuge, wie z. B. Perscan, Carsim, Carmaker usw.;
- Vertraut mit Roboter-Betriebssystemen ROS usw. ;
- Einige Simulationspositionen dienen ausschließlich der Simulation, einige Positionen erfordern jedoch die Entwicklung von Simulationsumgebungen. Für solche Positionen gelten höhere Programmieranforderungen.
3.6 Testingenieur
- Berufsvorstellung:
- Diese Richtung ist hauptsächlich für die Testarbeiten im Zusammenhang mit autonomen Fahrzeugen, das Testen der Leistung verschiedener Indikatoren der Funktionen des autonomen Fahrsystems und die Bewertung seiner Randbedingungen verantwortlich und Fehlermodi;
- Verantwortlich für das Design und die Implementierung von automatisierten Tests (SIL, HIL) und der damit verbundenen Verifizierung von intelligenten Fahrprodukten;
- Verantwortlich für die Formulierung von Testfällen und Testplänen basierend auf den funktionalen Anforderungen des Systems oder Produkts;
Verantwortlich für die Formulierung eines vollständigen System- oder Produkttestplans und deren Umsetzung und schließlich für das Verfassen eines Testberichts. - Grenzbeispiele des Systems sammeln und testen, die Sicherheit des intelligenten Fahrsystems bewerten und angemessenes Feedback zur Technologie geben.
-
- Anforderungen an Fähigkeiten:
Vertraut mit dem Betriebssystem Ubuntu/Linux, kann Python-Skripte schreiben; - Vertraut mit Methoden und Techniken zum Schreiben von Testfällen;
- Vertraut mit Bilderkennungsalgorithmen und Deep Learning , und Beherrschung von Spark Bonuspunkte für diejenigen, die sich für Tools im Zusammenhang mit Big Data interessieren
- Vertrautheit mit der Anwendung von Laserradar, Millimeterwellenradar, Ultraschallsonden und Kameras ist ein Bonus.
-
- 3.7 Big Data Development Engineer
Berufsvorstellung:
- Daten umfassen Hintergrunddatenarchitektur und Front-End-Präsentation. Ein autonomes Fahrzeug erzeugt täglich 1 Terabyte an Daten. Wie Sie Daten schnell bereinigen, verfeinern und zusammenfassen, z. B. wie Sie bei einem Fahrtest schnell die wichtigsten Abweichungen finden. Dies hilft Ingenieuren, effizienter zu testen.
Verantwortlich für den Entwurf, die Entwicklung und die Optimierung des Big-Data-Plattformsystems für autonomes Fahren. - Verantwortlich für die Entwicklung visueller Tools für die Annotation und Verarbeitung von Daten beim autonomen Fahren sowie für den Entwurf und die Entwicklung automatisierter Annotationsplattformen.
-
- Fähigkeitsanforderungen:
- Sie verfügen über solide Kenntnisse in Datenstrukturen und Algorithmen;
Beherrschen Sie mindestens eine höhere Programmiersprache wie Java/Python/C++; - Sie verfügen über Erfahrung im Design und in der Entwicklung von SQL- oder No-SQL-Datenbankanwendungen.
- Vertraut mit REST-Diensten und Webstandards, vertraut mit einem gängigen Front-End-Entwicklungsframework wie React/AngularJS, zusätzliche Punkte für diejenigen, die unabhängig erstellen können Front-End-Anwendungen;
- Vertraut mit autonomem Fahren und den damit verbundenen Lidar-, Kamera- und anderen Sensordaten erhalten zusätzliche Punkte.
-
- 3.8 UI-Entwicklungsingenieur
-
Berufsvorstellung:
Jedes Unternehmen muss interne Tools entwickeln, um die Fahrzeugentwicklung zu überprüfen. Außerdem ist es notwendig, verschiedene interaktive Seiten für die Fernsteuerungszentrale zu erstellen, um das autonome Fahrzeug über eine Benutzeroberfläche fernzusteuern. Es umfasst auch die für die Fahrgäste im Wagen vorbereitete Benutzeroberfläche. Freunde, die Design mögen oder gut im Frontend sind, können es in Betracht ziehen. -
Fähigkeitsanforderungen:
- Sie verfügen über eine ausgezeichnete Ästhetik und einen reichen visuellen Ausdruck;
- Kompetente Farb-, Grafik-, Informations- und GUI-Designprinzipien und -methoden.
- 4. Ende
-
Schließlich fördert die nationale Politik energisch neue energieintelligente Fahrzeuge und wir hoffen, dass sich immer mehr Partner der autonomen Fahrbranche anschließen.
Originallink: https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
Das obige ist der detaillierte Inhalt vonEine umfassende Einführung in autonome Fahrpositionen – das umfassendste Kapitel der Geschichte. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!


 Der Unterschied zwischen Unix und Linux
Der Unterschied zwischen Unix und Linux
 So legen Sie die Transparenz der HTML-Schriftfarbe fest
So legen Sie die Transparenz der HTML-Schriftfarbe fest
 Die Rolle des HTML-Titel-Tags
Die Rolle des HTML-Titel-Tags
 So lösen Sie das Problem, dass Apple nicht mehr als 200 Dateien herunterladen kann
So lösen Sie das Problem, dass Apple nicht mehr als 200 Dateien herunterladen kann
 Was ist eine relationale Datenbank?
Was ist eine relationale Datenbank?
 Was bedeutet OS?
Was bedeutet OS?
 Es ist nicht möglich, das Standard-Gateway des Computers zu reparieren
Es ist nicht möglich, das Standard-Gateway des Computers zu reparieren
 So ändern Sie den Dateinamen unter Linux
So ändern Sie den Dateinamen unter Linux








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



