

Das automatische Parksystem ermöglicht es dem Fahrzeug, selbstständig einen Parkplatz zu finden und ohne manuellen Eingriff präzise einzuparken. Außerdem kann es je nach Benutzerbedarf an einen bestimmten Ort fahren. Die Ausgereiftheit dieser Technologie wird die Unannehmlichkeiten der Menschen während des Parkvorgangs, wie z. B. die Zeitverschwendung bei der Suche nach einem Parkplatz über einen längeren Zeitraum, sowie Sicherheitsprobleme wie Fahrzeugkollisionen und Reibung, die bei der Suche nach einem Parkplatz auftreten können, erheblich verringern.
Derzeit erforschen viele Technologieunternehmen und Universitätslabore den Bereich des autonomen Parkens. Unternehmen wie Mercedes-Benz und Bosch haben Parkinfrastruktur aufgebaut und entwickeln automatische Fahralgorithmen und Parkraumerkennungsmethoden für Parkplätze. BMW hat auch automatische Parkmodule in Serienfahrzeugen installiert.
Angesichts der großen Nachfrage nach automatischer Parktechnik in der Branche haben wir eine systematische Umfrage zum Entwicklungsstand automatischer Parksysteme durchgeführt. Einschließlich Branchenstandardtrends automatischer Parksysteme, Leistungsbewertungsindikatoren, Technologie, die in jedes Untermodul automatischer Parksysteme integriert ist usw.
Da das aktuelle automatische Parksystem in Industrie und Wissenschaft große Aufmerksamkeit erregt hat, entwickeln verschiedene Länder und Unternehmen ständig die automatische Parktechnologie weiter. Daher ist es besonders wichtig, Standards für die automatische Parktechnik zu formulieren. Zu den technischen Standards, die formuliert wurden, gehören Geografische Informationen, Außenpositionierung, Innenraumpositionierung, Parkstandards und Fahrzeugkommunikationsstandards. Die spezifischen Standards sind in der folgenden Tabelle zusammengefasst.
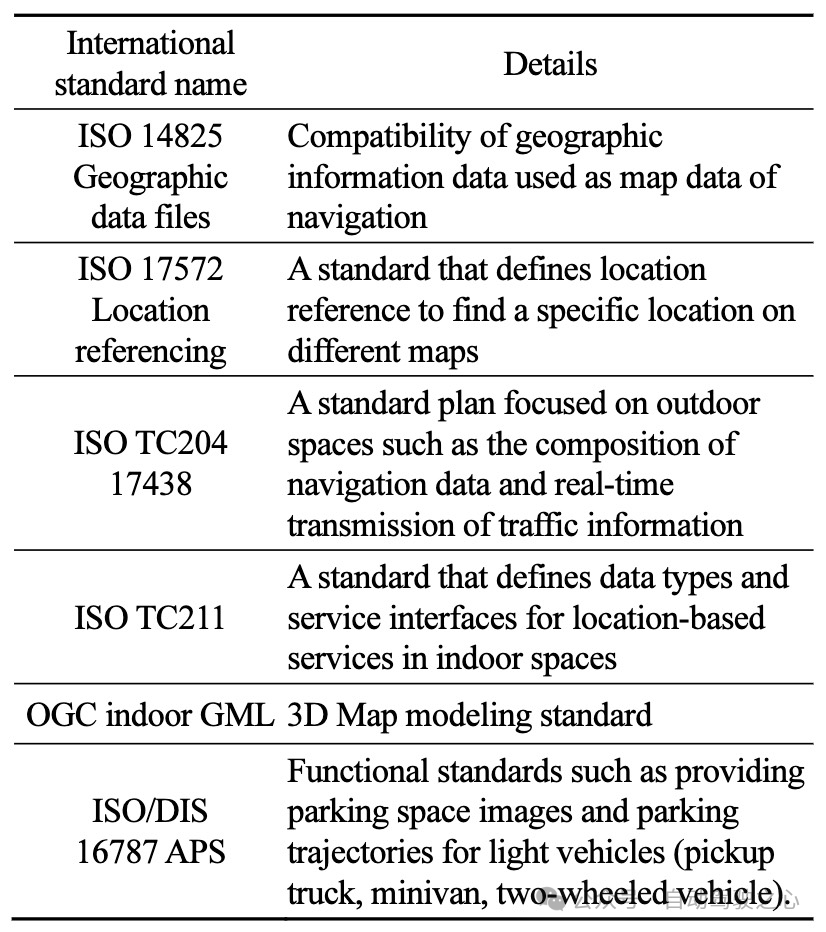
Relevante Standards in der automatischen Parkbranche
Die aktuelle Bewertung automatischer Parksysteme umfasst zwei Teile, nämlich Bewertung des automatischen Fahrteils und Bewertung des automatischen Parkteils.
Die Bewertung der autonomen Fahrtechnologie folgt dem von der Automotive Engineering Society formulierten Standard „Autonomous Driving Technology Stage“. Dieser Standard unterteilt die autonome Fahrtechnologie in sechs Stufen, basierend auf technischem Niveau und Kontrolle Thema und Fahrfähigkeiten. Um die Bewertung der einzelnen Ebenen zu erleichtern, wurden die in Entwicklung befindlichen Standards ISO/WD 34501 und ISO/WD 34502 vorgeschlagen. Die Norm ISO/WD 34501 gilt für Begriffe und Definitionen für Testszenarien in Level-3-Systemen, während die Norm ISO/WD 34502 Leitlinien für Testszenarien und einen Sicherheitsbewertungsprozess bietet. Die Formulierung dieser Standards zielt darauf ab, einheitliche Bewertungskriterien für die Entwicklung und Anwendung autonomer Fahrtechnologie bereitzustellen und die Entwicklung autonomer Fahrtechnologie zu fördern.
Obwohl die automatische Parktechnologie derzeit große Aufmerksamkeit erregt, steckt die Entwicklung internationaler Standards noch in den Kinderschuhen. Im Gegensatz zu den Bewertungsstandards für autonomes Fahren wird das technische Niveau des autonomen Parkens hauptsächlich anhand der Bewertungsstandards der Entwickler gemessen.
Die folgende Tabelle zeigt Beispiele für autonome Parkszenarien im Verkehrssituationsszenariosystem, unterteilt nach Leistungsstufen.
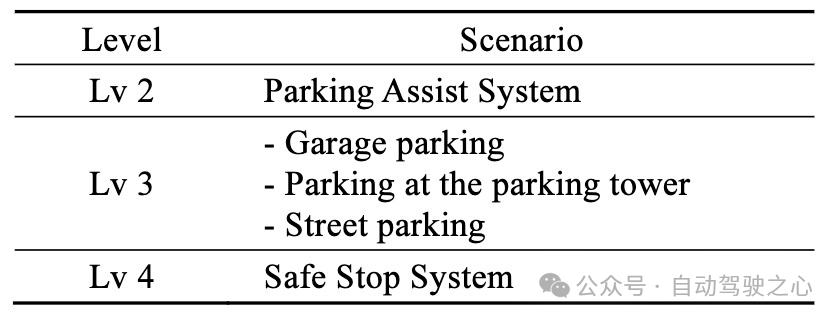
Automatische Parkebeneneinteilung
Die Systembewertung von Verkehrssituationsszenarien umfasst zwei Teile autonomer Fahr- und Parkszenarien und verwendet die von der Society of Automotive Engineering definierte „Stufe der autonomen Fahrtechnologie“, um die Fähigkeit des autonomen Fahrens anzuzeigen Parken. Derzeit gibt es drei Ebenen im System.
Das aktuelle automatische Parksystem besteht hauptsächlich aus drei Teilen, wie in der Abbildung unten dargestellt: Suchfahrprozess, Automatischer Parkprozess und Rückkehr zum Fahrprozess . Wir geben zunächst eine allgemeine Einführung in jeden Prozess und stellen dann die aktuellen Entwicklungstrends jedes Prozesses vor.
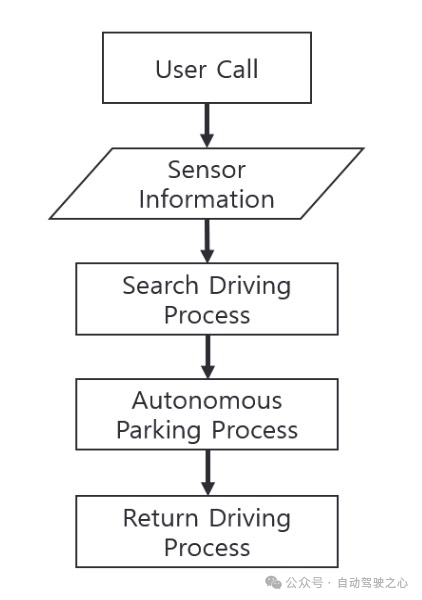
Workflow des automatischen Parksystems
Das ultimative Ziel des Suchfahrprozesses besteht darin, dass das Auto selbstständig einen Parkplatz auf dem Parkplatz finden kann, daher erfordert dieser Prozess den Einsatz von Positionierung, Kollisionsvermeidung und Parklückenerkennungstechnologie.
Einführung in die Positionierungstechnologie
Im automatischen Parksystem kann GPS oder der fahrzeugeigene IMU-Sensor verwendet werden, um die Geschwindigkeit und Lage des Fahrzeugs zu bestätigen und den Positionsschätzungsfehler des Fahrzeugs zu korrigieren. Allerdings kann in manchen Innenaufnahmen das GPS-Signal nicht empfangen werden. Daher müssen selbstfahrende Fahrzeuge zur Unterstützung mit Kameras, Lidar und Millimeterwellenradar ausgestattet sein. Das Bild unten ist eine Einführung in einige Sensorinformationen, mit denen das Fahrzeug ausgestattet ist.
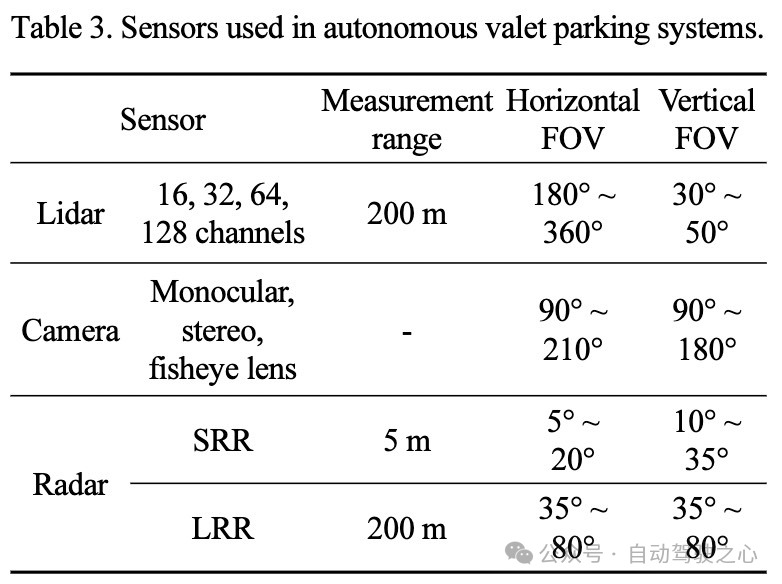
Einführung in die Sensorinformation von automatisch parkenden Fahrzeugen
Nach Erhalt der von diesen verschiedenen Sensoren gesammelten Informationen kann die SLAM-Mapping-Technologie verwendet werden, um die Umgebung des autonomen Fahrzeugs zu rekonstruieren und so eine Positionierung des Fahrzeugs zu erreichen. Die SLAM-Mapping-Technologie kann in die folgenden zwei Kategorien unterteilt werden: Direkte Mapping-Methode: Verfolgung der Intensität der Daten, die sich ändern, wenn sich der Sensor bewegt, um die Lage des Sensors abzuschätzen. Da diese Art von Methode jedoch leicht durch Lichtveränderungen beeinträchtigt wird und keine Verschiebung möglich ist, basieren aktuelle Kartierungsmethoden selten auf dieser Art von Methode.
Da das Hauptanwendungsszenario des automatischen Parksystems auf dem Parkplatz liegt und auf dem Parkplatz viele Fahrzeuge geparkt sein werden, ist die Antikollisionstechnologie sehr wichtig . In der Antikollisionstechnik werden hauptsächlich Ultraschallsensoren
,Kurzwellenradarsensoren, Lidarsensoren und Kamerasensoren eingesetzt. Zur Erzielung einer genauen Entfernungsmessung werden hauptsächlich Akustik- und Radarsensoren eingesetzt. Kamerasensoren nutzen hauptsächlich den Positionsunterschied desselben Objekts in aufeinanderfolgenden Bildern, um die Entfernung in der Tiefe abzuschätzen.
ParkplatzerkennungstechnologieDie Parkplatzerkennung wird kontinuierlich während des Such- und Fahrprozesses durchgeführt und umfasst in der Regel traditionelle Computer Vision, Deep Learning und eine hybride Implementierung der beiden Methoden.
Traditionelle Computer Vision spezifiziert und identifiziert hauptsächlich die Form von Parkplätzen, wie z. B. die Erkennung von Parkplatzlinien und Merkmalspunkten, wie in der folgenden Abbildung dargestellt.Beispiel für die Parkplatzform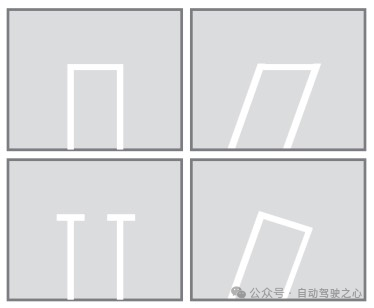
Parkplatzerkennungsprozess basierend auf einem Faltungs-Neuronalen Netzwerk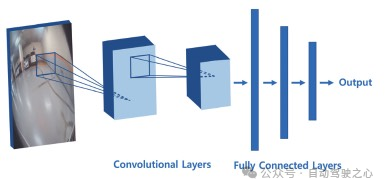
Automatischer Parkvorgang
Der algorithmusbasierte Ansatz beinhaltet die Berechnung der Lage und Form des Weges zum Parkplatz sowie der aktuellen Position des Fahrzeugs. Um einen geeigneten Parkweg zu berechnen, umfasst der Algorithmus Algorithmen wie optimale Steuerungsprobleme, gitterbasierte Wegeplanungsmethoden und die schnelle Erkundung zufälliger Bäume.
Auf Verstärkungslernen basierende Methoden können optimale Pfade für autonome Parkvorgänge in autonomen Parksimulatoren generieren. In einem autonomen Parksimulator lernt das Fahrzeug einen gängigen Parkvorgang. Diese Lernmethode ermittelt kontinuierlich den optimalen Pfad mit der höchsten Parkgenauigkeit, indem der Pfadgenerierungsprozess und die Bewertung wiederholt werden, wie in der folgenden Abbildung dargestellt.
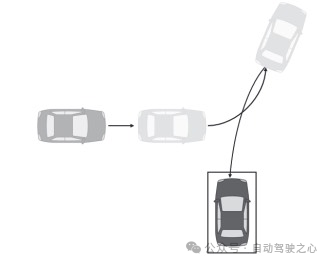
Umgekehrter Parkvorgang des automatischen Parkens
Zurück zum Fahrvorgang bedeutet, dass der Benutzer das Fahrzeug anrufen kann, um es in Bewegung zu setzen, wenn das selbstfahrende Fahrzeug in die Parklücke einfährt und wartet Gehen Sie zu dem vom Benutzer angegebenen Ort. In diesem Prozess müssen wir die Pfadverfolgungstechnologie verwenden.
Derzeit umfasst die Pfadverfolgungstechnologie Methoden zur Verfolgung von Fahrwegen und Methoden zur Verfolgung geänderter Pfade. Allerdings verwenden beide Methoden ähnliche Fahrzeugsteuerungsalgorithmen. Einzelheiten finden Sie im Dokument [1-2]. Die allgemeine Idee besteht darin, den Steuerbefehl auszuführen, um das Fahrzeug entlang der generierten Bahn zu bewegen, wobei die aktuelle Position und die Lenkwinkelbedingungen des Fahrzeugs berücksichtigt werden.
Aufgrund der steigenden Nachfrage nach automatischer Parktechnik entwickeln verschiedene Länder und Hersteller mit Hochdruck automatische Parksysteme. Unter Berücksichtigung der rasanten Entwicklung der automatischen Parktechnologie fassen wir in diesem Artikel die Standardisierungstrends, Bewertungsstandards und verschiedenen Komponenten automatischer Parksysteme zusammen und stellen sie im Detail vor

Originallink: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
Das obige ist der detaillierte Inhalt vonAllgemeine Forschung zum autonomen Parken, Integration von Industriestandards, Trendbewertungen und Systemeinführungen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Server-Evaluierungssoftware
Server-Evaluierungssoftware
 So finden Sie den Median eines Arrays in PHP
So finden Sie den Median eines Arrays in PHP
 Wie man unter Linux mit verstümmelten chinesischen Schriftzeichen umgeht
Wie man unter Linux mit verstümmelten chinesischen Schriftzeichen umgeht
 Welche Datei ist ISO?
Welche Datei ist ISO?
 RTMP-Server
RTMP-Server
 NullpointerException-Ausnahme
NullpointerException-Ausnahme
 So öffnen Sie eine DB-Datei
So öffnen Sie eine DB-Datei
 bootmgr fehlt und kann nicht booten
bootmgr fehlt und kann nicht booten
 Der Unterschied zwischen fprintf und printf
Der Unterschied zwischen fprintf und printf








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



