
 Backend-Entwicklung
Python-Tutorial
Lernen Sie die detaillierten Schritte zum Implementieren des A*-Algorithmus in Python kennen
Backend-Entwicklung
Python-Tutorial
Lernen Sie die detaillierten Schritte zum Implementieren des A*-Algorithmus in Python kennen
Lernen Sie die detaillierten Schritte zum Implementieren des A*-Algorithmus in Python kennen

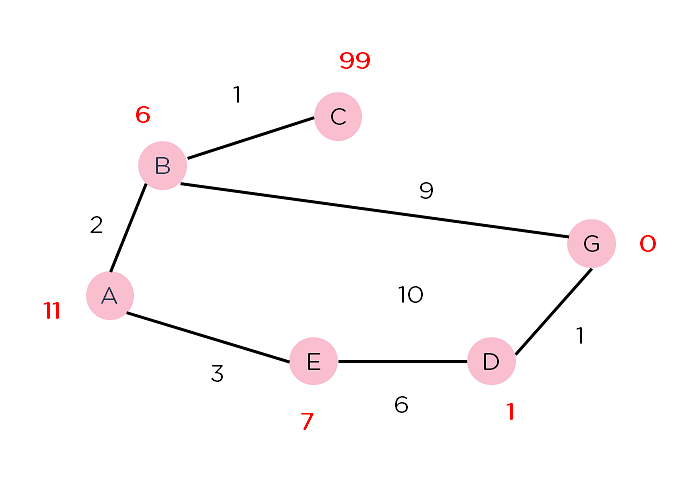
以此加权图为例,用Python实现A*算法。加权图中的节点用粉红色圆圈表示,并且给出了沿节点的路径的权重。节点上方的数字代表节点的启发式值。
首先为算法创建类。一个用于存储与起始节点的距离,另一个用于存储父节点。并将它们初始化为0,以及起始节点。
def aStarAlgo(start_node,stop_node):
open_set=set(start_node)
closed_set=set()
g={}
parents={}
g[start_node]=0
parents[start_node]=start_node找到具有最低f(n)值的相邻节点,针对到达目标节点的条件进行编码。如果不是这种情况,则将当前节点放入打开列表中,并设置其父节点。
While len(open_set)>0: n=None for v in open_set: if n==None or g[v]+heuristic(v)<g[n]+heuristic(n): n=v if n==stop_node or Graph_nodes[n]==None: pass else: for(m,weight)in get_neighbors(n): if m not in open_set and m not in closed_set: open_set.add(m) parents[m]=n g[m]=g[n]+weight
如果相邻的g值低于当前节点并且在封闭列表中,则将其替换为这个新节点作为父节点。
else: if g[m]>g[n]+weight: g[m]=g[n]+weight parents[m]=n if m in closed_set: closed_set.remove(m) open_set.add(m)
如果当前g低于前一个g,并且其相邻在open list中,则将其替换为较低的g值,并将相邻的parent更改为当前节点。
如果不在两个列表中,则将其添加到打开列表并设置其g值。
if n==None:
print('Path does not exist!')
return None
if n==stop_node:
path=[]
while parents[n]!=n:
path.append(n)
n=parents[n]
path.append(start_node)
path.reverse()
print('Path found:{}'.format(path))
return path
open_set.remove(n)
closed_set.add(n)
print('Path does not exist!')
return None现在,定义一个函数来返回相邻节点及其距离。
def get_neighbors(v): if v in Graph_nodes: return Graph_nodes[v] else: return None
此外,创建一个函数来检查启发式值。
def heuristic(n):
H_dist={
'A':11,
'B':6,
'C':99,
'D':1,
'E':7,
'G':0,
}
return H_dist[n]描述一下图表并调用A*函数。
Graph_nodes={
'A':[('B',2),('E',3)],
'B':[('C',1),('G',9)],
'C':Node,
'E':[('D',6)],
'D':[('G',1)],
}
aStarAlgo('A','G')算法遍历图,找到代价最小的路径。
这是通过E => D => G。
Das obige ist der detaillierte Inhalt vonLernen Sie die detaillierten Schritte zum Implementieren des A*-Algorithmus in Python kennen. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1677
1677
 14
1431
52
1334
25
1280
29
1257
24
14
1431
52
1334
25
1280
29
1257
24

 Python vs. C: Lernkurven und Benutzerfreundlichkeit
Apr 19, 2025 am 12:20 AM
Python vs. C: Lernkurven und Benutzerfreundlichkeit
Apr 19, 2025 am 12:20 AM
Python ist leichter zu lernen und zu verwenden, während C leistungsfähiger, aber komplexer ist. 1. Python -Syntax ist prägnant und für Anfänger geeignet. Durch die dynamische Tippen und die automatische Speicherverwaltung können Sie die Verwendung einfach zu verwenden, kann jedoch zur Laufzeitfehler führen. 2.C bietet Steuerung und erweiterte Funktionen auf niedrigem Niveau, geeignet für Hochleistungsanwendungen, hat jedoch einen hohen Lernschwellenwert und erfordert manuellem Speicher und Typensicherheitsmanagement.
 Python lernen: Ist 2 Stunden tägliches Studium ausreichend?
Apr 18, 2025 am 12:22 AM
Python lernen: Ist 2 Stunden tägliches Studium ausreichend?
Apr 18, 2025 am 12:22 AM
Ist es genug, um Python für zwei Stunden am Tag zu lernen? Es hängt von Ihren Zielen und Lernmethoden ab. 1) Entwickeln Sie einen klaren Lernplan, 2) Wählen Sie geeignete Lernressourcen und -methoden aus, 3) praktizieren und prüfen und konsolidieren Sie praktische Praxis und Überprüfung und konsolidieren Sie und Sie können die Grundkenntnisse und die erweiterten Funktionen von Python während dieser Zeit nach und nach beherrschen.
 Python vs. C: Erforschung von Leistung und Effizienz erforschen
Apr 18, 2025 am 12:20 AM
Python vs. C: Erforschung von Leistung und Effizienz erforschen
Apr 18, 2025 am 12:20 AM
Python ist in der Entwicklungseffizienz besser als C, aber C ist in der Ausführungsleistung höher. 1. Pythons prägnante Syntax und reiche Bibliotheken verbessern die Entwicklungseffizienz. 2. Die Kompilierungsmerkmale von Compilation und die Hardwarekontrolle verbessern die Ausführungsleistung. Bei einer Auswahl müssen Sie die Entwicklungsgeschwindigkeit und die Ausführungseffizienz basierend auf den Projektanforderungen abwägen.
 Python vs. C: Verständnis der wichtigsten Unterschiede
Apr 21, 2025 am 12:18 AM
Python vs. C: Verständnis der wichtigsten Unterschiede
Apr 21, 2025 am 12:18 AM
Python und C haben jeweils ihre eigenen Vorteile, und die Wahl sollte auf Projektanforderungen beruhen. 1) Python ist aufgrund seiner prägnanten Syntax und der dynamischen Typisierung für die schnelle Entwicklung und Datenverarbeitung geeignet. 2) C ist aufgrund seiner statischen Tipp- und manuellen Speicherverwaltung für hohe Leistung und Systemprogrammierung geeignet.
 Welches ist Teil der Python Standard Library: Listen oder Arrays?
Apr 27, 2025 am 12:03 AM
Welches ist Teil der Python Standard Library: Listen oder Arrays?
Apr 27, 2025 am 12:03 AM
PythonlistsarePartThestandardlibrary, whilearraysarenot.listarebuilt-in, vielseitig und UNDUSEDFORSPORINGECollections, während dieArrayRay-thearrayModulei und loses und loses und losesaluseduetolimitedFunctionality.
 Python: Automatisierung, Skript- und Aufgabenverwaltung
Apr 16, 2025 am 12:14 AM
Python: Automatisierung, Skript- und Aufgabenverwaltung
Apr 16, 2025 am 12:14 AM
Python zeichnet sich in Automatisierung, Skript und Aufgabenverwaltung aus. 1) Automatisierung: Die Sicherungssicherung wird durch Standardbibliotheken wie OS und Shutil realisiert. 2) Skriptschreiben: Verwenden Sie die PSUTIL -Bibliothek, um die Systemressourcen zu überwachen. 3) Aufgabenverwaltung: Verwenden Sie die Zeitplanbibliothek, um Aufgaben zu planen. Die Benutzerfreundlichkeit von Python und die Unterstützung der reichhaltigen Bibliothek machen es zum bevorzugten Werkzeug in diesen Bereichen.
 Python für wissenschaftliches Computer: Ein detailliertes Aussehen
Apr 19, 2025 am 12:15 AM
Python für wissenschaftliches Computer: Ein detailliertes Aussehen
Apr 19, 2025 am 12:15 AM
Zu den Anwendungen von Python im wissenschaftlichen Computer gehören Datenanalyse, maschinelles Lernen, numerische Simulation und Visualisierung. 1.Numpy bietet effiziente mehrdimensionale Arrays und mathematische Funktionen. 2. Scipy erweitert die Numpy -Funktionalität und bietet Optimierungs- und lineare Algebra -Tools. 3.. Pandas wird zur Datenverarbeitung und -analyse verwendet. 4.Matplotlib wird verwendet, um verschiedene Grafiken und visuelle Ergebnisse zu erzeugen.
 Python für die Webentwicklung: Schlüsselanwendungen
Apr 18, 2025 am 12:20 AM
Python für die Webentwicklung: Schlüsselanwendungen
Apr 18, 2025 am 12:20 AM
Zu den wichtigsten Anwendungen von Python in der Webentwicklung gehören die Verwendung von Django- und Flask -Frameworks, API -Entwicklung, Datenanalyse und Visualisierung, maschinelles Lernen und KI sowie Leistungsoptimierung. 1. Django und Flask Framework: Django eignet sich für die schnelle Entwicklung komplexer Anwendungen, und Flask eignet sich für kleine oder hochmobile Projekte. 2. API -Entwicklung: Verwenden Sie Flask oder Djangorestframework, um RESTFUFFUPI zu erstellen. 3. Datenanalyse und Visualisierung: Verwenden Sie Python, um Daten zu verarbeiten und über die Webschnittstelle anzuzeigen. 4. Maschinelles Lernen und KI: Python wird verwendet, um intelligente Webanwendungen zu erstellen. 5. Leistungsoptimierung: optimiert durch asynchrones Programmieren, Caching und Code
