
 Technologie-Peripheriegeräte
KI
CMUÐ gelingt ein Durchbruch: Der Roboterhund verfügt über einen vollen Beweglichkeitswert und kann Hindernisse mit extrem hoher Geschwindigkeit überwinden, wodurch Geschwindigkeit und Sicherheit kombiniert werden!
Technologie-Peripheriegeräte
KI
CMUÐ gelingt ein Durchbruch: Der Roboterhund verfügt über einen vollen Beweglichkeitswert und kann Hindernisse mit extrem hoher Geschwindigkeit überwinden, wodurch Geschwindigkeit und Sicherheit kombiniert werden!
CMUÐ gelingt ein Durchbruch: Der Roboterhund verfügt über einen vollen Beweglichkeitswert und kann Hindernisse mit extrem hoher Geschwindigkeit überwinden, wodurch Geschwindigkeit und Sicherheit kombiniert werden!

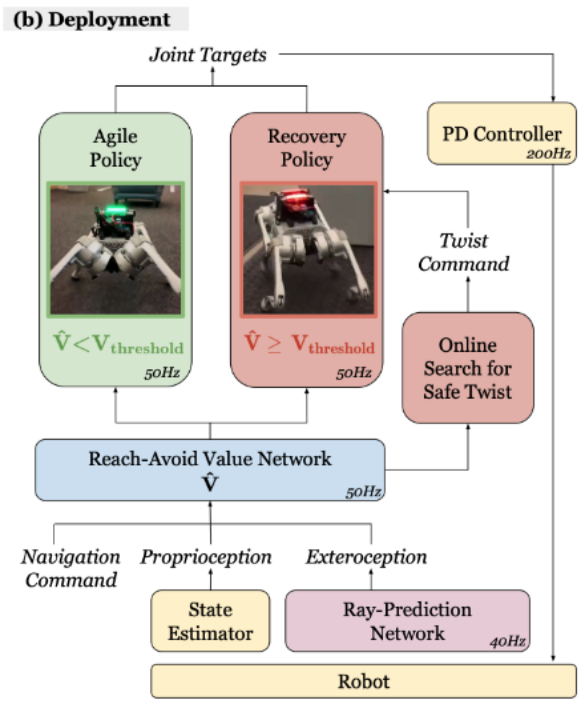
CMU- und ETH-Teams arbeiteten zusammen, um ein neues Framework namens „Agile But Safe“ (ABS) zu entwickeln, das eine Lösung für vierbeinige Roboter bietet, um Hochgeschwindigkeitsbewegungen in komplexen Umgebungen zu erreichen. Das Framework zeigt nicht nur eine hohe Effizienz bei der Kollisionsvermeidung, sondern erreicht auch eine beispiellose Geschwindigkeit von 3,1 Millisekunden. Diese Innovation bringt neue Fortschritte auf dem Gebiet der Beinroboter.
Im Bereich der Hochgeschwindigkeitsroboterbewegung war es schon immer eine große Herausforderung, Geschwindigkeit und Sicherheit gleichzeitig aufrechtzuerhalten. Doch einem Forschungsteam der Carnegie Mellon University (CMU) und der ETH Zürich (ETH) ist kürzlich ein Durchbruch gelungen. Der von ihnen entwickelte neue Vierbeiner-Roboteralgorithmus kann sich nicht nur schnell in komplexen Umgebungen bewegen, sondern auch Hindernissen geschickt ausweichen und so das Ziel „Agilität und Sicherheit“ wirklich erreichen. Die Innovation dieses Algorithmus liegt in seiner Fähigkeit, die Umgebung schnell zu identifizieren und zu analysieren und auf der Grundlage von Echtzeitdaten intelligente Entscheidungen zu treffen. Durch den Einsatz fortschrittlicher Sensoren und leistungsstarker Rechenleistung ist der Roboter in der Lage, Hindernisse in seiner Umgebung genau zu erkennen und ihnen auszuweichen, indem er seinen Gang und seine Flugbahn anpasst. Die erfolgreiche Anwendung dieser Technologie wird die Entwicklung von Hochgeschwindigkeitsrobotern erheblich vorantreiben.

Papieradresse: https://arxiv.org/pdf/2401.17583.pdf In verschiedenen Szenarien haben alle erstaunliche Fähigkeiten zur Vermeidung von Hindernissen bei hoher Geschwindigkeit bewiesen:
Enge Korridore voller Hindernisse:
 Unordentliche Innenszenen:
Unordentliche Innenszenen:
 Ob Gras oder draußen, statische oder dynamische Hindernisse, der Roboter Hund kann gelassen damit umgehen:
Ob Gras oder draußen, statische oder dynamische Hindernisse, der Roboter Hund kann gelassen damit umgehen:
 Bei der Begegnung mit einem Kinderwagen weicht der Roboterhund geschickt aus:
Bei der Begegnung mit einem Kinderwagen weicht der Roboterhund geschickt aus:
 Auch Warnschilder, Kisten und Stühle sind kein Problem:
Auch Warnschilder, Kisten und Stühle sind kein Problem:
 Er kommt auch problemlos damit zurecht mit dem plötzlichen Auftauchen von Matten und menschlichen Füßen Bypass:
Er kommt auch problemlos damit zurecht mit dem plötzlichen Auftauchen von Matten und menschlichen Füßen Bypass:
 Der Roboterhund kann sogar Adler spielen und Hühner fangen:
Der Roboterhund kann sogar Adler spielen und Hühner fangen:
RL+ Lernmodellfreier Reach-Avoid-Wert
ABS verwendet eine duale Richtlinieneinstellung, einschließlich einer „Agile Policy“ und einer „Recovery Policy“. Agilitätsstrategien ermöglichen es dem Roboter, sich schnell durch Hindernisse zu bewegen, während Wiederherstellungsstrategien eingreifen, um die Sicherheit des Roboters zu gewährleisten, sobald die Reach-Avoid-Value-Schätzung potenzielle Gefahren erkennt (z. B. das plötzliche Auftauchen eines Kinderwagens).
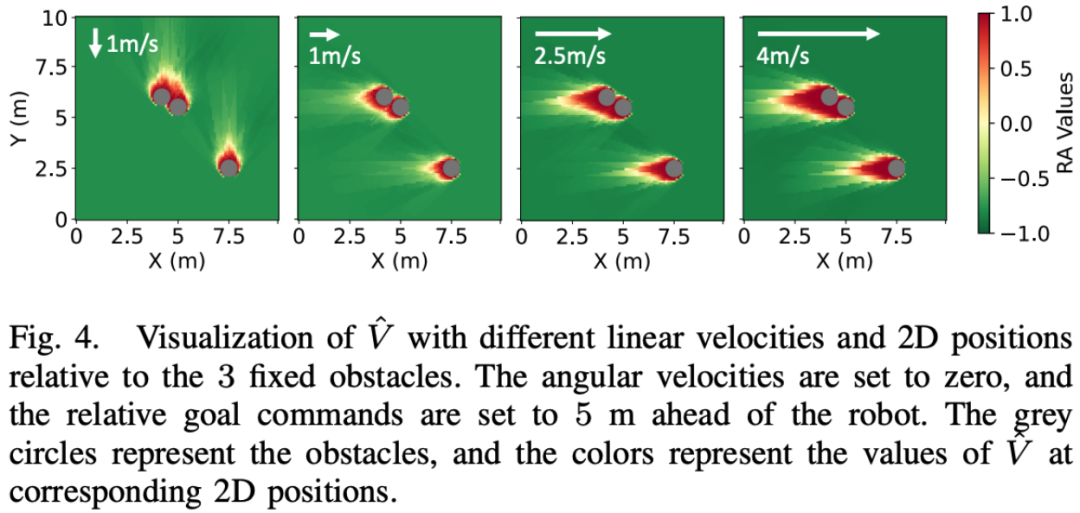
Die Abbildung unten zeigt den erlernten RA-Wert (Reach Defense) für einen bestimmten Satz von Hindernissen. Wenn sich die Robotergeschwindigkeit ändert, ändert sich die Verteilungslandschaft der RA-Werte entsprechend. Das Vorzeichen des RA-Wertes ist ein sinnvoller Hinweis auf die Sicherheit der agilen Strategie. Mit anderen Worten: Diese Grafik zeigt das Sicherheitsrisiko des Roboters, wenn er bestimmten Hindernissen mit unterschiedlichen Geschwindigkeiten durch unterschiedliche RA-Werte gegenübersteht. Die hohen und niedrigen Änderungen des RA-Werts spiegeln die Sicherheitsrisiken wider, denen der Roboter bei der Ausführung agiler Strategien in verschiedenen Zuständen ausgesetzt sein kann.
Die Innovation der Wiederherstellungsstrategie besteht darin, dass sie es dem vierbeinigen Roboter ermöglicht, als Backup schnell lineare Geschwindigkeits- und Winkelgeschwindigkeitsanweisungen zu verfolgen Erhaltungsstrategien. Im Gegensatz zur agilen Strategie konzentriert sich der Beobachtungsraum der Wiederherstellungsstrategie auf die Verfolgung von Lineargeschwindigkeits- und Winkelgeschwindigkeitsbefehlen und erfordert keine externen sensorischen Informationen. Die Missionsbelohnungen der Wiederherstellungsstrategie konzentrieren sich auf die Verfolgung der linearen Geschwindigkeit, die Verfolgung der Winkelgeschwindigkeit, das Überleben und die Aufrechterhaltung der Körperhaltung, um einen reibungslosen Wechsel zurück zur Beweglichkeitsstrategie zu ermöglichen. Das Training dieser Strategie wird ebenfalls in einer Simulationsumgebung durchgeführt, jedoch mit spezifischer Domänen-Randomisierung und Kurseinstellungen, um sich besser an die Bedingungen anzupassen, die die Wiederherstellungsstrategie auslösen können. Dieser Ansatz bietet vierbeinigen Robotern die Möglichkeit, schnell auf mögliche Ausfälle bei Hochgeschwindigkeitsbewegungen zu reagieren.
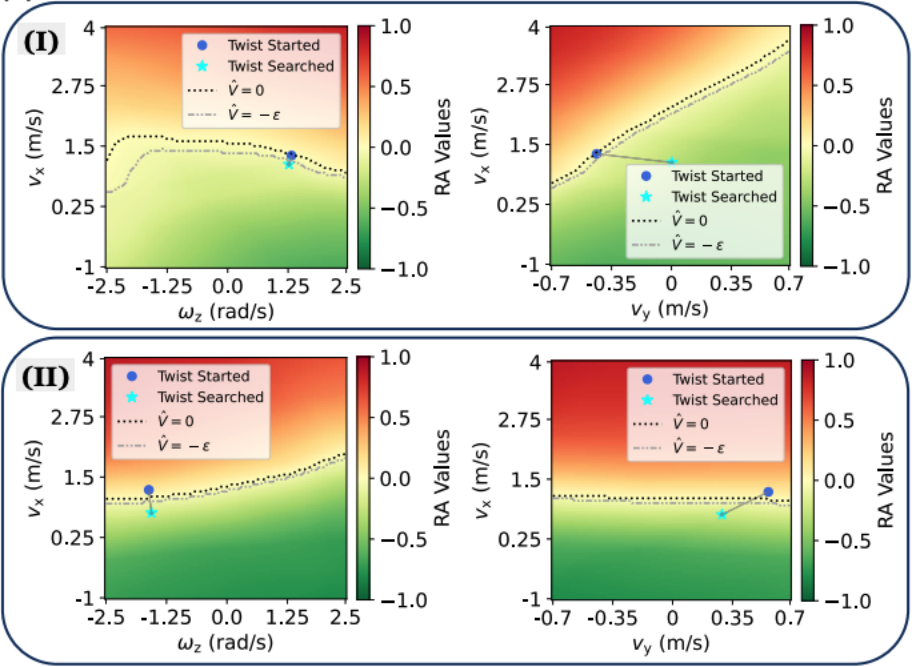
Die folgende Abbildung zeigt eine visuelle Darstellung der RA-Wertelandschaft (Rare Defense), wenn die Wiederherstellungsstrategie in zwei spezifischen Situationen (I und II) ausgelöst wird. Diese Visualisierungen werden in den Ebenen vx (Geschwindigkeit entlang der x-Achse) versus ωz (Winkelgeschwindigkeit um die z-Achse) und vx versus vy (Geschwindigkeit entlang der y-Achse) durchgeführt. Die Abbildung zeigt den anfänglichen Rotationszustand vor der Suche (d. h. den aktuellen Rotationszustand der Roboterbasis) und die durch die Suche erhaltenen Befehle. Vereinfacht ausgedrückt zeigen diese Diagramme die optimalen Bewegungsanweisungen, die durch die Wiederherstellungsstrategiesuche unter bestimmten Bedingungen erhalten wurden, und wie sich diese Anweisungen auf den RA-Wert auswirken und somit die Sicherheit des Roboters in verschiedenen Bewegungszuständen widerspiegeln.

Das obige ist der detaillierte Inhalt vonCMUÐ gelingt ein Durchbruch: Der Roboterhund verfügt über einen vollen Beweglichkeitswert und kann Hindernisse mit extrem hoher Geschwindigkeit überwinden, wodurch Geschwindigkeit und Sicherheit kombiniert werden!. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 Der DeepMind-Roboter spielt Tischtennis und seine Vor- und Rückhand rutschen in die Luft, wodurch menschliche Anfänger völlig besiegt werden
Aug 09, 2024 pm 04:01 PM
Der DeepMind-Roboter spielt Tischtennis und seine Vor- und Rückhand rutschen in die Luft, wodurch menschliche Anfänger völlig besiegt werden
Aug 09, 2024 pm 04:01 PM
Aber vielleicht kann er den alten Mann im Park nicht besiegen? Die Olympischen Spiele in Paris sind in vollem Gange und Tischtennis hat viel Aufmerksamkeit erregt. Gleichzeitig haben Roboter auch beim Tischtennisspielen neue Durchbrüche erzielt. Gerade hat DeepMind den ersten lernenden Roboteragenten vorgeschlagen, der das Niveau menschlicher Amateurspieler im Tischtennis-Wettkampf erreichen kann. Papieradresse: https://arxiv.org/pdf/2408.03906 Wie gut ist der DeepMind-Roboter beim Tischtennisspielen? Vermutlich auf Augenhöhe mit menschlichen Amateurspielern: Sowohl Vorhand als auch Rückhand: Der Gegner nutzt unterschiedliche Spielstile, und auch der Roboter hält aus: Aufschlagannahme mit unterschiedlichem Spin: Allerdings scheint die Intensität des Spiels nicht so intensiv zu sein wie Der alte Mann im Park. Für Roboter, Tischtennis
 Die erste mechanische Klaue! Yuanluobao trat auf der Weltroboterkonferenz 2024 auf und stellte den ersten Schachroboter vor, der das Haus betreten kann
Aug 21, 2024 pm 07:33 PM
Die erste mechanische Klaue! Yuanluobao trat auf der Weltroboterkonferenz 2024 auf und stellte den ersten Schachroboter vor, der das Haus betreten kann
Aug 21, 2024 pm 07:33 PM
Am 21. August fand in Peking die Weltroboterkonferenz 2024 im großen Stil statt. Die Heimrobotermarke „Yuanluobot SenseRobot“ von SenseTime hat ihre gesamte Produktfamilie vorgestellt und kürzlich den Yuanluobot AI-Schachspielroboter – Chess Professional Edition (im Folgenden als „Yuanluobot SenseRobot“ bezeichnet) herausgebracht und ist damit der weltweit erste A-Schachroboter für heim. Als drittes schachspielendes Roboterprodukt von Yuanluobo hat der neue Guoxiang-Roboter eine Vielzahl spezieller technischer Verbesserungen und Innovationen in den Bereichen KI und Maschinenbau erfahren und erstmals die Fähigkeit erkannt, dreidimensionale Schachfiguren aufzunehmen B. durch mechanische Klauen an einem Heimroboter, und führen Sie Mensch-Maschine-Funktionen aus, z. B. Schach spielen, jeder spielt Schach, Überprüfung der Notation usw.
 Claude ist auch faul geworden! Netizen: Lernen Sie, sich einen Urlaub zu gönnen
Sep 02, 2024 pm 01:56 PM
Claude ist auch faul geworden! Netizen: Lernen Sie, sich einen Urlaub zu gönnen
Sep 02, 2024 pm 01:56 PM
Der Schulstart steht vor der Tür und nicht nur die Schüler, die bald ins neue Semester starten, sollten auf sich selbst aufpassen, sondern auch die großen KI-Modelle. Vor einiger Zeit war Reddit voller Internetnutzer, die sich darüber beschwerten, dass Claude faul werde. „Sein Niveau ist stark gesunken, es kommt oft zu Pausen und sogar die Ausgabe wird sehr kurz. In der ersten Woche der Veröffentlichung konnte es ein komplettes 4-seitiges Dokument auf einmal übersetzen, aber jetzt kann es nicht einmal eine halbe Seite ausgeben.“ !
 Auf der Weltroboterkonferenz wurde dieser Haushaltsroboter, der „die Hoffnung auf eine zukünftige Altenpflege' in sich trägt, umzingelt
Aug 22, 2024 pm 10:35 PM
Auf der Weltroboterkonferenz wurde dieser Haushaltsroboter, der „die Hoffnung auf eine zukünftige Altenpflege' in sich trägt, umzingelt
Aug 22, 2024 pm 10:35 PM
Auf der World Robot Conference in Peking ist die Präsentation humanoider Roboter zum absoluten Mittelpunkt der Szene geworden. Am Stand von Stardust Intelligent führte der KI-Roboterassistent S1 drei große Darbietungen mit Hackbrett, Kampfkunst und Kalligraphie auf Ein Ausstellungsbereich, der sowohl Literatur als auch Kampfkunst umfasst, zog eine große Anzahl von Fachpublikum und Medien an. Durch das elegante Spiel auf den elastischen Saiten demonstriert der S1 eine feine Bedienung und absolute Kontrolle mit Geschwindigkeit, Kraft und Präzision. CCTV News führte einen Sonderbericht über das Nachahmungslernen und die intelligente Steuerung hinter „Kalligraphie“ durch. Firmengründer Lai Jie erklärte, dass hinter den seidenweichen Bewegungen die Hardware-Seite die beste Kraftkontrolle und die menschenähnlichsten Körperindikatoren (Geschwindigkeit, Belastung) anstrebt. usw.), aber auf der KI-Seite werden die realen Bewegungsdaten von Menschen gesammelt, sodass der Roboter stärker werden kann, wenn er auf eine schwierige Situation stößt, und lernen kann, sich schnell weiterzuentwickeln. Und agil
 Bekanntgabe der ACL 2024 Awards: Eines der besten Papers zum Thema Oracle Deciphering von HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Bekanntgabe der ACL 2024 Awards: Eines der besten Papers zum Thema Oracle Deciphering von HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
Bei dieser ACL-Konferenz haben die Teilnehmer viel gewonnen. Die sechstägige ACL2024 findet in Bangkok, Thailand, statt. ACL ist die führende internationale Konferenz im Bereich Computerlinguistik und Verarbeitung natürlicher Sprache. Sie wird von der International Association for Computational Linguistics organisiert und findet jährlich statt. ACL steht seit jeher an erster Stelle, wenn es um akademischen Einfluss im Bereich NLP geht, und ist außerdem eine von der CCF-A empfohlene Konferenz. Die diesjährige ACL-Konferenz ist die 62. und hat mehr als 400 innovative Arbeiten im Bereich NLP eingereicht. Gestern Nachmittag gab die Konferenz den besten Vortrag und weitere Auszeichnungen bekannt. Diesmal gibt es 7 Best Paper Awards (zwei davon unveröffentlicht), 1 Best Theme Paper Award und 35 Outstanding Paper Awards. Die Konferenz verlieh außerdem drei Resource Paper Awards (ResourceAward) und einen Social Impact Award (
 Hongmeng Smart Travel S9 und die umfassende Einführungskonferenz für neue Produkte wurden gemeinsam mit einer Reihe neuer Blockbuster-Produkte veröffentlicht
Aug 08, 2024 am 07:02 AM
Hongmeng Smart Travel S9 und die umfassende Einführungskonferenz für neue Produkte wurden gemeinsam mit einer Reihe neuer Blockbuster-Produkte veröffentlicht
Aug 08, 2024 am 07:02 AM
Heute Nachmittag begrüßte Hongmeng Zhixing offiziell neue Marken und neue Autos. Am 6. August veranstaltete Huawei die Hongmeng Smart Xingxing S9 und die Huawei-Konferenz zur Einführung neuer Produkte mit umfassendem Szenario und brachte die Panorama-Smart-Flaggschiff-Limousine Xiangjie S9, das neue M7Pro und Huawei novaFlip, MatePad Pro 12,2 Zoll, das neue MatePad Air und Huawei Bisheng mit Mit vielen neuen Smart-Produkten für alle Szenarien, darunter die Laserdrucker der X1-Serie, FreeBuds6i, WATCHFIT3 und der Smart Screen S5Pro, von Smart Travel über Smart Office bis hin zu Smart Wear baut Huawei weiterhin ein Smart-Ökosystem für alle Szenarien auf, um Verbrauchern ein Smart-Erlebnis zu bieten Internet von allem. Hongmeng Zhixing: Huawei arbeitet mit chinesischen Partnern aus der Automobilindustrie zusammen, um die Modernisierung der Smart-Car-Industrie voranzutreiben
 Das Team von Li Feifei schlug ReKep vor, um Robotern räumliche Intelligenz zu verleihen und GPT-4o zu integrieren
Sep 03, 2024 pm 05:18 PM
Das Team von Li Feifei schlug ReKep vor, um Robotern räumliche Intelligenz zu verleihen und GPT-4o zu integrieren
Sep 03, 2024 pm 05:18 PM
Tiefe Integration von Vision und Roboterlernen. Wenn zwei Roboterhände reibungslos zusammenarbeiten, um Kleidung zu falten, Tee einzuschenken und Schuhe zu packen, gepaart mit dem humanoiden 1X-Roboter NEO, der in letzter Zeit für Schlagzeilen gesorgt hat, haben Sie vielleicht das Gefühl: Wir scheinen in das Zeitalter der Roboter einzutreten. Tatsächlich sind diese seidigen Bewegungen das Produkt fortschrittlicher Robotertechnologie + exquisitem Rahmendesign + multimodaler großer Modelle. Wir wissen, dass nützliche Roboter oft komplexe und exquisite Interaktionen mit der Umgebung erfordern und die Umgebung als Einschränkungen im räumlichen und zeitlichen Bereich dargestellt werden kann. Wenn Sie beispielsweise möchten, dass ein Roboter Tee einschenkt, muss der Roboter zunächst den Griff der Teekanne ergreifen und sie aufrecht halten, ohne den Tee zu verschütten, und ihn dann sanft bewegen, bis die Öffnung der Kanne mit der Öffnung der Tasse übereinstimmt , und neigen Sie dann die Teekanne in einem bestimmten Winkel. Das
 Distributed Artificial Intelligence Conference DAI 2024 Call for Papers: Agent Day, Richard Sutton, der Vater des Reinforcement Learning, wird teilnehmen! Yan Shuicheng, Sergey Levine und DeepMind-Wissenschaftler werden Grundsatzreden halten
Aug 22, 2024 pm 08:02 PM
Distributed Artificial Intelligence Conference DAI 2024 Call for Papers: Agent Day, Richard Sutton, der Vater des Reinforcement Learning, wird teilnehmen! Yan Shuicheng, Sergey Levine und DeepMind-Wissenschaftler werden Grundsatzreden halten
Aug 22, 2024 pm 08:02 PM
Einleitung zur Konferenz Mit der rasanten Entwicklung von Wissenschaft und Technologie ist künstliche Intelligenz zu einer wichtigen Kraft bei der Förderung des sozialen Fortschritts geworden. In dieser Zeit haben wir das Glück, die Innovation und Anwendung der verteilten künstlichen Intelligenz (DAI) mitzuerleben und daran teilzuhaben. Verteilte Künstliche Intelligenz ist ein wichtiger Zweig des Gebiets der Künstlichen Intelligenz, der in den letzten Jahren immer mehr Aufmerksamkeit erregt hat. Durch die Kombination des leistungsstarken Sprachverständnisses und der Generierungsfähigkeiten großer Modelle sind plötzlich Agenten aufgetaucht, die auf natürlichen Sprachinteraktionen, Wissensbegründung, Aufgabenplanung usw. basieren. AIAgent übernimmt das große Sprachmodell und ist zu einem heißen Thema im aktuellen KI-Kreis geworden. Au
