
 Technologie-Peripheriegeräte
KI
Die KI-Gedankenlesetechnologie wurde verbessert! Eine Brille steuert den Bostoner Roboterhund direkt und macht gehirngesteuerte Roboter zur Realität
Technologie-Peripheriegeräte
KI
Die KI-Gedankenlesetechnologie wurde verbessert! Eine Brille steuert den Bostoner Roboterhund direkt und macht gehirngesteuerte Roboter zur Realität
Die KI-Gedankenlesetechnologie wurde verbessert! Eine Brille steuert den Bostoner Roboterhund direkt und macht gehirngesteuerte Roboter zur Realität

Erinnern Sie sich noch an die KI-Gedankenlesefähigkeiten von früher? In letzter Zeit hat sich die Fähigkeit, „alle Wünsche wahr werden zu lassen“, wieder weiterentwickelt,
– Menschen können Roboter direkt durch ihre eigenen Gedanken steuern!
MIT-Forscher haben das Ddog-Projekt veröffentlicht. Sie entwickelten unabhängig voneinander ein Brain-Computer-Interface (BCI)-Gerät zur Steuerung des Roboterhundes Spot von Boston Dynamics.
Hunde können sich in bestimmte Bereiche bewegen, Menschen dabei helfen, Dinge zu besorgen, oder Fotos entsprechend den Gedanken des Menschen machen.
Im Vergleich zur vorherigen Kopfbedeckung, die den Einsatz vieler Sensoren zum „Lesen der Gedanken“ erforderte, wird das Gehirn-Computer-Schnittstellengerät dieses Mal in Form einer drahtlosen Brille (AttentivU) präsentiert.
Obwohl das im Video gezeigte Verhalten einfach ist, besteht der Zweck dieses Systems darin, Spot in ein grundlegendes Kommunikationstool zu verwandeln, um Menschen mit Krankheiten wie ALS, Zerebralparese oder Rückenmarksverletzungen zu helfen.
Nur zwei iPhones und eine Brille können verzweifelten Menschen praktische Hilfe und Pflege bringen.
Und wie wir in entsprechenden Artikeln sehen werden, basiert dieses System tatsächlich auf einer sehr komplexen Technik.

Papieradresse: https://doi.org/10.3390/s24010080
Das Ddog-System verwendet AttentivU als Gehirn-Computer-Schnittstellensystem, und der Sensor ist in den Rahmen eingebettet, um das Elektroenzephalogramm einer Person zu messen (EEG) oder Gehirnaktivität und Elektrookulogramm oder Augenbewegung.
Die Grundlage dieser Forschung ist Brain Switch des MIT, ein Echtzeit-BCI mit geschlossenem Regelkreis, der es Benutzern ermöglicht, nonverbal und in Echtzeit mit Betreuern zu kommunizieren.
Die Erfolgsquote des Ddog-Systems liegt bei 83,4 %, und dies ist das erste Mal, dass ein drahtloses, nicht-visuelles BCI-System in Spot in einem Anwendungsfall für persönliche Assistenten integriert wurde.
Im Video können wir die Entwicklung von Gehirnschnittstellengeräten und einige Gedanken der Entwickler sehen.
Zuvor hat das Forschungsteam die Interaktion zwischen der Gehirn-Computer-Schnittstelle und dem Smart Home abgeschlossen und nun die Steuerung eines Roboters abgeschlossen, der sich bewegen und bedienen kann.
Diese Studien haben besonderen Menschen einen Lichtblick gegeben und ihnen Hoffnung gegeben, in Zukunft zu überleben und sogar besser zu leben.
Im Vergleich zur oktopusähnlichen Sensorkopfbedeckung sind die Brillen unten tatsächlich viel cooler.

Nach Angaben der National Organization for Rare Diseases gibt es derzeit 30.000 ALS-Patienten in den Vereinigten Staaten und jedes Jahr werden schätzungsweise 5.000 neue Fälle diagnostiziert. Darüber hinaus leiden laut Cerebral Palsy Guide etwa 1 Million Amerikaner an Zerebralparese.
Viele dieser Menschen haben oder werden irgendwann die Fähigkeit verlieren, zu gehen, sich anzuziehen, zu sprechen, zu schreiben und sogar zu atmen.
Obwohl es Kommunikationshilfen gibt, handelt es sich bei den meisten um Augengeräte, die es Benutzern ermöglichen, über einen Computer zu kommunizieren. Es gibt nicht viele Systeme, die es Benutzern ermöglichen, mit der Welt um sie herum zu interagieren.
Dieses vierbeinige Robotersystem von BCI dient als früher Prototyp und ebnet den Weg für die zukünftige Entwicklung moderner persönlicher Assistenzroboter.
Hoffentlich können wir in zukünftigen Iterationen noch mehr erstaunliche Funktionen sehen.
Gehirngesteuerter Vierbeiner-Roboter
In dieser Arbeit untersuchen Forscher, wie drahtlose und tragbare BCI-Geräte einen Vierbeiner-Roboter steuern können – Boston Dynamics' Spot.
Das von den Forschern entwickelte Gerät misst die Aktivität des Elektroenzephalogramms (EEG) und Elektrookulogramms (EOG) des Benutzers über im Brillengestell eingebettete Elektroden.
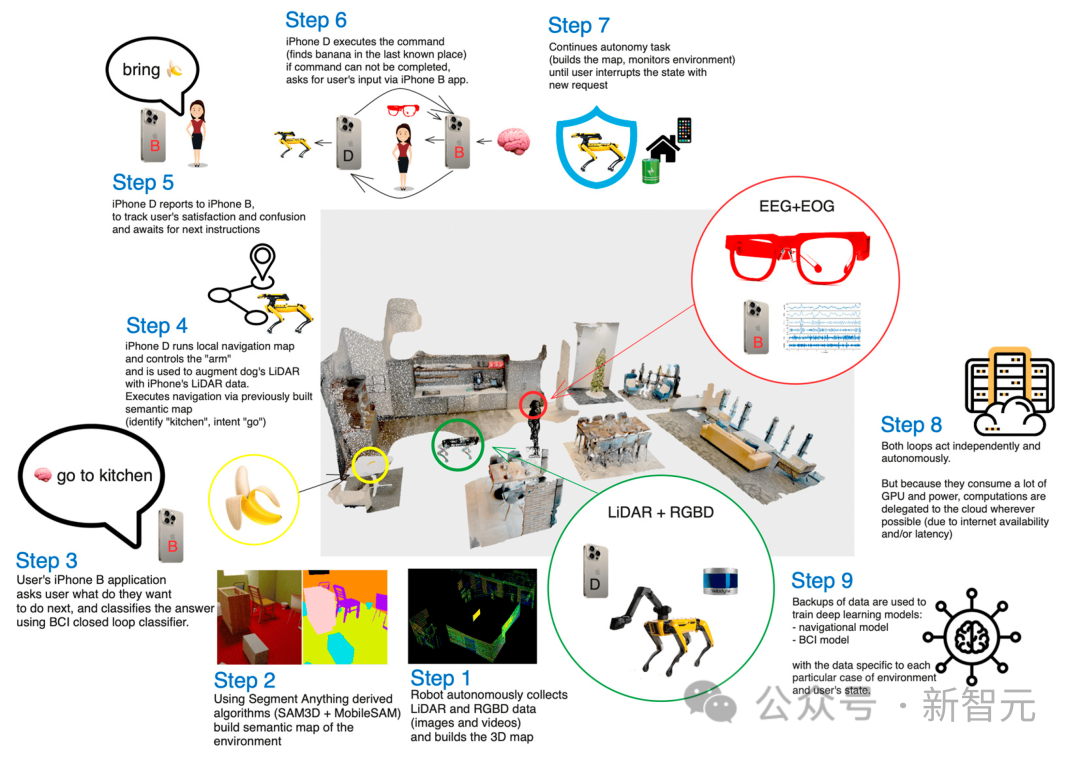
Benutzer beantworten im Kopf eine Reihe von Fragen („Ja“ oder „Nein“), und jede Frage entspricht einer Reihe voreingestellter Spot-Operationen.
Fordern Sie Spot beispielsweise auf, durch einen Raum zu gehen, einen Gegenstand (z. B. eine Flasche Wasser) aufzunehmen und ihn dann für den Benutzer zurückzuholen.
Roboter und BCI
Bis heute ist das EEG eine der praktischsten und anwendbarsten nicht-invasiven Gehirn-Computer-Schnittstellenmethoden.
BCI-Systeme können mithilfe endogener (spontaner) oder exogener (evozierter) Signale gesteuert werden.
In exogenen Gehirn-Computer-Schnittstellen treten evozierte Signale auf, wenn eine Person auf äußere Reize wie visuelle oder akustische Hinweise achtet.
Zu den Vorteilen dieser Methode gehören ein minimalistisches Training und hohe Bitraten von bis zu 60 Bit/min. Dies erfordert jedoch, dass sich der Benutzer immer auf den Reiz konzentriert, was die Anwendbarkeit im wirklichen Leben einschränkt. Darüber hinaus ermüden Benutzer bei der Verwendung exogener BCIs schnell.
In endogenen Gehirn-Computer-Schnittstellen werden Steuersignale unabhängig von jeglicher äußerer Stimulation generiert und können vom Benutzer bei Bedarf vollständig ausgeführt werden. Für Benutzer mit sensorischen Beeinträchtigungen bietet dies eine natürlichere und intuitivere Art der Interaktion, da Benutzer spontan Befehle an das System erteilen können.
Diese Methode erfordert jedoch normalerweise eine längere Einarbeitungszeit und hat eine niedrigere Bitrate.
Roboteranwendungen mit Gehirn-Computer-Schnittstellen eignen sich häufig für hilfsbedürftige Menschen und umfassen häufig Rollstühle und Exoskelette.
Die folgende Abbildung zeigt die neuesten Fortschritte bei der Gehirn-Computer-Schnittstelle und der Robotiktechnologie ab 2023.
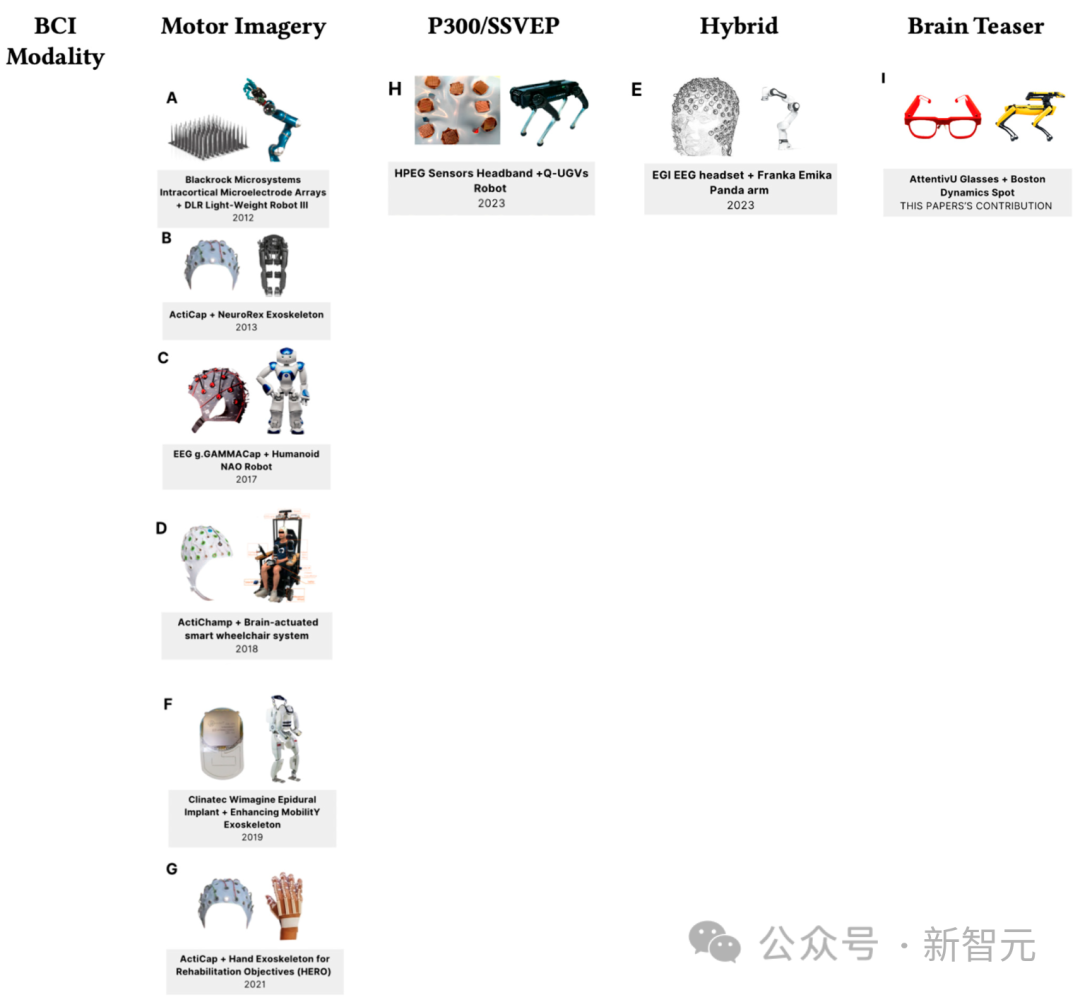
Vierbeinerroboter werden häufig zur Unterstützung von Benutzern in komplexen Arbeitsumgebungen oder Verteidigungsanwendungen eingesetzt.
Einer der bekanntesten vierbeinigen Roboter ist der Spot von Boston Dynamics, der bis zu 15 Kilogramm Nutzlast transportieren und Wartungsstellen wie Tunnel iterativ kartieren kann. Auch die Immobilien- und Bergbaubranche setzt vierbeinige Roboter wie Spot ein, um Baustellen mit komplexer Logistik zu überwachen.
Dieser Artikel verwendet den von der mobilen BCI-Lösung gesteuerten Spot-Roboter und basiert auf Kopfrechenaufgaben. Die Gesamtarchitektur heißt Ddog.
Ddog-Architektur
Die folgende Abbildung zeigt die Gesamtstruktur von Ddog:
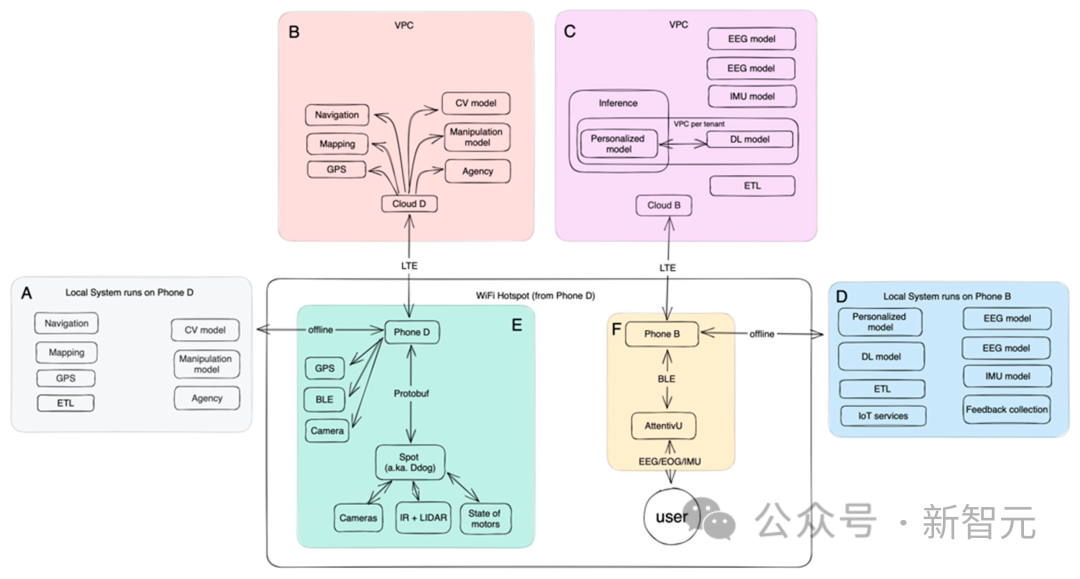
Ddog ist eine autonome Anwendung, die es Benutzern ermöglicht, den Spot-Roboter durch Eingaben von BCI und der Anwendung zu steuern nutzt Stimme. Geben Sie Benutzern und ihren Betreuern Feedback.
Das System ist so konzipiert, dass es vollständig offline oder vollständig online funktioniert. Die Online-Version verfügt über einen fortschrittlicheren Satz maschineller Lernmodelle sowie besser abgestimmte Modelle und ist für lokale Geräte energieeffizienter.
Das gesamte System ist für reale Szenarien konzipiert und ermöglicht in den meisten Teilen eine schnelle Iteration.
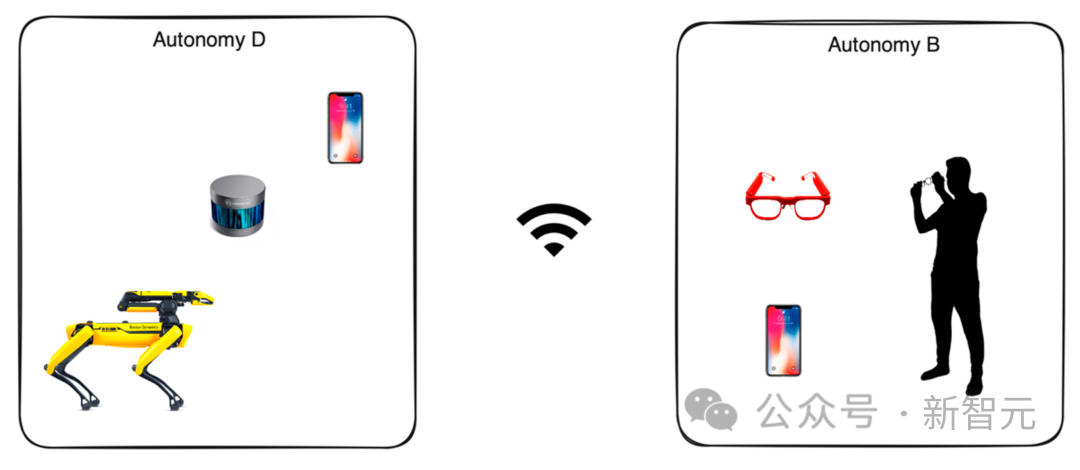
Auf der Clientseite interagiert der Benutzer mit dem Gehirn-Computer-Schnittstellengerät (AttentivU) über eine mobile Anwendung, die das Bluetooth Low Energy (BLE)-Protokoll verwendet, um mit dem Gerät zu kommunizieren.
Das Mobilgerät des Benutzers kommuniziert mit einem anderen Telefon, das den Spot-Roboter steuert, um dem Benutzer Handlungsfähigkeit, Manipulation, Navigation und letztendlich Unterstützung zu ermöglichen.
Die Kommunikation zwischen Telefonen kann über WLAN oder ein Mobilfunknetz erfolgen. Das gesteuerte Mobiltelefon richtet einen WLAN-Hotspot ein und sowohl Ddog als auch das Mobiltelefon des Benutzers sind mit diesem Hotspot verbunden. Im Online-Modus können Sie auch eine Verbindung zu Modellen herstellen, die in der Cloud ausgeführt werden.
Serverseite
Die Serverseite verwendet Kubernetes (K8S)-Cluster, und jeder Cluster wird in seiner eigenen Virtual Private Cloud (VPC) bereitgestellt.
Die Cloud arbeitet in einer dedizierten VPC, die normalerweise in derselben Availability Zone näher an den Endbenutzern bereitgestellt wird, wodurch die Reaktionslatenz für jeden Dienst minimiert wird.
Jeder Container im Cluster ist für einen einzigen Zweck konzipiert (Microservice-Architektur), jeder Dienst ist ein laufendes KI-Modell, seine Aufgaben umfassen: Navigation, Kartierung, Computer Vision, Manipulation, Positionierung und Agentur.
Mapping: Ein Dienst, der Informationen über die Umgebung des Roboters aus verschiedenen Quellen sammelt. Es bildet statische, unbewegliche Daten ab (einen Baum, ein Gebäude, eine Wand), erfasst aber auch dynamische Daten, die sich im Laufe der Zeit ändern (ein Auto, eine Person).
Navigation: Basierend auf den in früheren Diensten gesammelten und erweiterten Kartendaten ist der Navigationsdienst für die Konstruktion des Pfades zwischen Punkt A und Punkt B in Raum und Zeit verantwortlich. Darüber hinaus ist es für die Konstruktion alternativer Routen sowie die Schätzung des Zeitaufwands verantwortlich.
Computer Vision: Sammeln Sie visuelle Daten von Roboterkameras und ergänzen Sie sie mit Daten von Ihrem Telefon, um räumliche und zeitliche Darstellungen zu erstellen. Dieser Dienst versucht auch, jeden visuellen Punkt zu segmentieren und Objekte zu identifizieren.
Die Cloud ist für das Training von BCI-bezogenen Modellen verantwortlich, einschließlich Elektroenzephalogramm (EEG), Elektrookulogramm (EOG) und Inertial Measurement Unit (IMU).
Auf Mobiltelefonen bereitgestellte Offline-Modelle führen die Datenerfassung und -aggregation durch und nutzen gleichzeitig die mobilen Modelle von TensorFlow (optimiert für kleinere RAM- und ARM-basierte CPUs) für Echtzeit-Inferenz.
Vision und Betrieb
Die ursprüngliche Version, die zur Bereitstellung des Segmentierungsmodells verwendet wurde, war ein einzelnes TensorFlow-3D-Modell, das LIDAR-Daten nutzte. Die Autoren erweiterten dies dann auf ein Wenig-Schuss-Modell und verbesserten es durch die Ausführung komplementärer Modelle auf Neural Radiation Field (NeRF)- und RGBD-Daten.
Die von Ddog gesammelten Rohdaten werden von fünf Kameras aggregiert. Jede Kamera kann Graustufen-, Fischaugen-, Tiefen- und Infrarotdaten liefern. Im Greifarm des Arms befindet sich außerdem eine sechste Kamera mit 4K-Auflösung und LED-Funktionen, die mit einem vortrainierten TensorFlow-Modell zur Erkennung von Objekten arbeitet.
Punktwolken werden aus Lidar-Daten und RGBD-Daten von Ddog und Mobiltelefonen generiert. Nachdem die Datenerfassung abgeschlossen ist, werden sie über ein einziges Koordinatensystem normalisiert und an einen globalen Zustand angepasst, der alle Bild- und 3D-Positionierungsdaten zusammenführt.
Der Betrieb hängt vollständig von der Qualität des am Ddog installierten Roboterarmgreifers ab. Der Greifer im Bild unten wird von Boston Dynamics hergestellt.
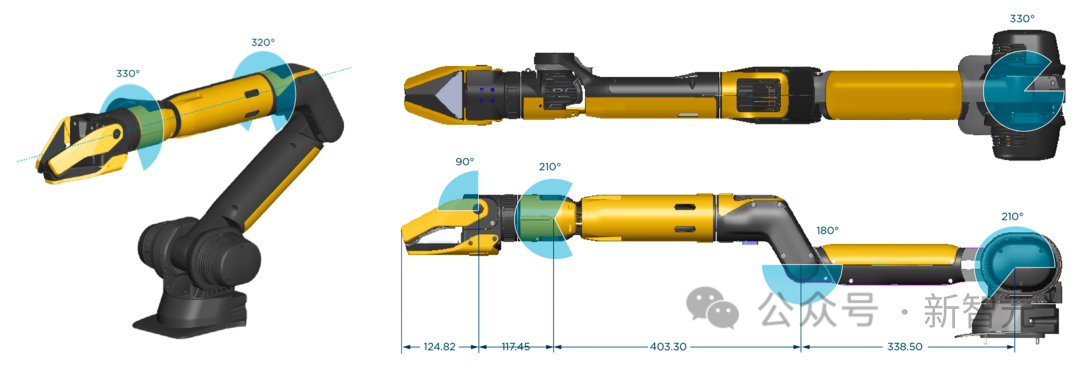
Beschränken Sie Ihre Anwendungsfälle auf grundlegende Interaktionen mit Objekten an vordefinierten Orten.
Der Autor zeichnete einen großen Laborraum und richtete ihn als „Wohnung“ mit einem „Küchen“-Bereich (mit einem Tablett mit verschiedenen Tassen und Flaschen), einem „Wohnzimmer“-Bereich (mit Kissen), einem kleinen Sofa und ein kleiner Couchtisch) und ein „Fenster-Lounge“-Bereich.

Die Anzahl der Anwendungsfälle wächst ständig. Die einzige Möglichkeit, die meisten davon abzudecken, besteht darin, ein System bereitzustellen, das über einen bestimmten Zeitraum kontinuierlich läuft, und die Daten zur Optimierung solcher Abläufe und Erfahrungen zu nutzen.
AttentivU
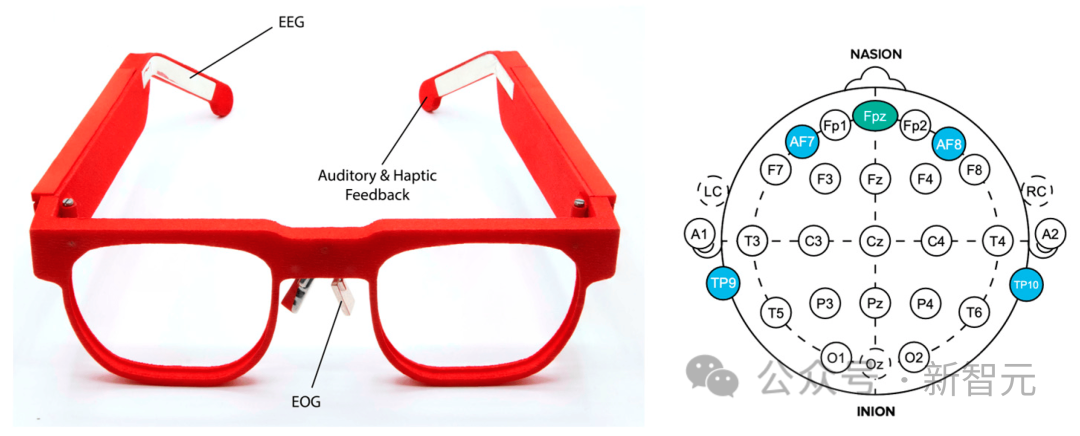
EEG-Daten werden vom AttentivU-Gerät erfasst. Die Elektroden der AttentivU-Brille bestehen aus natürlichem Silber und befinden sich gemäß dem internationalen 10-20-Elektrodenplatzierungssystem bei TP9 und TP10. Die Brille umfasst außerdem zwei EOG-Elektroden an den Nasenpads und eine EEG-Referenzelektrode am Fpz.
Diese Sensoren können die benötigten Informationen liefern und bei Bedarf einen geschlossenen Regelkreis in Echtzeit ermöglichen.
Das Gerät verfügt über zwei Modi, EEG und EOG, mit denen Signale von Aufmerksamkeit, Engagement, Müdigkeit und kognitiver Belastung in Echtzeit erfasst werden können. Das EEG wurde als neurophysiologischer Indikator für den Übergang zwischen Wachheit und Schlaf verwendet,
, während EOG auf der Messung bioelektrischer Signale basiert, die bei Augenbewegungen aufgrund der Hornhaut-Netzhaut-Dipoleigenschaften induziert werden. Untersuchungen zeigen, dass Augenbewegungen mit der Art des Gedächtniszugriffs korrelieren, der zur Ausführung bestimmter Aufgaben erforderlich ist, und ein gutes Maß für visuelles Engagement, Aufmerksamkeit und Schläfrigkeit sind.
Experiment
Teilen Sie zunächst die EEG-Daten in mehrere Fenster auf. Definieren Sie jedes Fenster als eine 1 Sekunde lange EEG-Datendauer mit 75 % Überlappung mit dem vorherigen Fenster.
Dann kommt die Datenvorverarbeitung und -bereinigung. Die Daten wurden mithilfe einer Kombination aus einem 50-Hz-Notch-Filter und einem Bandpassfilter mit einem Durchlassbereich von 0,5 Hz bis 40 Hz gefiltert, um die Entfernung von Netzrauschen und unerwünschten hohen Frequenzen sicherzustellen.
Als nächstes erstellte der Autor einen Artefakt-Ablehnungsalgorithmus. Eine Epoche wird abgelehnt, wenn die absolute Leistungsdifferenz zwischen zwei aufeinanderfolgenden Epochen größer als ein vordefinierter Schwellenwert ist.
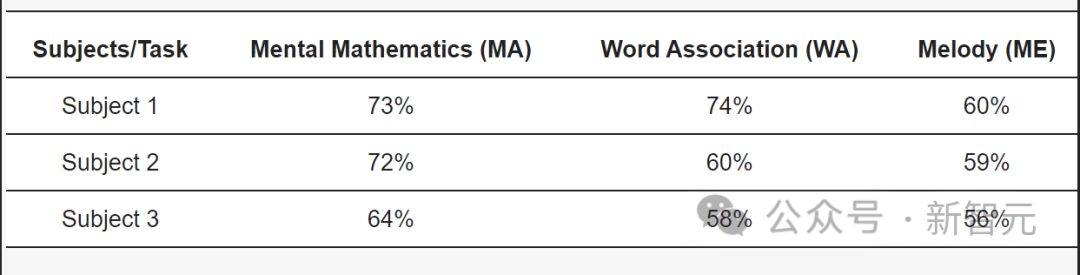
Im letzten Schritt der Klassifizierung mischten die Autoren verschiedene Spektralband-Leistungsverhältnisse, um die aufgabenbasierte geistige Aktivität jedes Probanden zu verfolgen. Für MA beträgt das Verhältnis (Alpha/Delta). Für WA beträgt das Verhältnis (Delta/Low Beta) und für ME beträgt das Verhältnis (Delta/Alpha).
Verwenden Sie dann einen Änderungspunkterkennungsalgorithmus, um Änderungen in diesen Verhältnissen zu verfolgen. Plötzliche Zunahmen oder Abnahmen dieser Verhältnisse deuten auf eine Veränderung im mentalen Zustand des Benutzers hin.
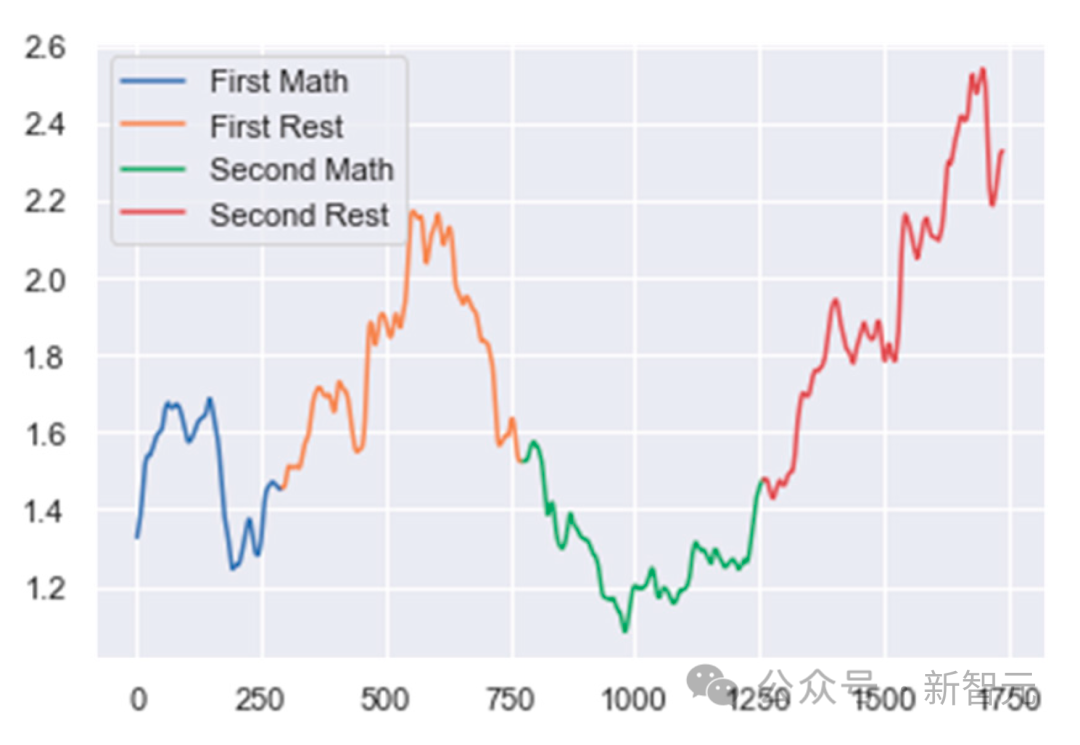
Bei Probanden mit ALS erreichte unser Modell eine Genauigkeit von 73 % bei der MA-Aufgabe, 74 % bei der WA-Aufgabe und 60 % bei der ME-Aufgabe.
Das obige ist der detaillierte Inhalt vonDie KI-Gedankenlesetechnologie wurde verbessert! Eine Brille steuert den Bostoner Roboterhund direkt und macht gehirngesteuerte Roboter zur Realität. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 So konfigurieren Sie das Debian Apache -Protokollformat
Apr 12, 2025 pm 11:30 PM
So konfigurieren Sie das Debian Apache -Protokollformat
Apr 12, 2025 pm 11:30 PM
In diesem Artikel wird beschrieben, wie das Protokollformat von Apache auf Debian -Systemen angepasst wird. Die folgenden Schritte führen Sie durch den Konfigurationsprozess: Schritt 1: Greifen Sie auf die Apache -Konfigurationsdatei zu. Die Haupt -Apache -Konfigurationsdatei des Debian -Systems befindet sich normalerweise in /etc/apache2/apache2.conf oder /etc/apache2/httpd.conf. Öffnen Sie die Konfigurationsdatei mit Root -Berechtigungen mit dem folgenden Befehl: Sudonano/etc/apache2/apache2.conf oder sudonano/etc/apache2/httpd.conf Schritt 2: Definieren Sie benutzerdefinierte Protokollformate, um zu finden oder zu finden oder
 Wie Tomcat -Protokolle bei der Fehlerbehebung bei Speicherlecks helfen
Apr 12, 2025 pm 11:42 PM
Wie Tomcat -Protokolle bei der Fehlerbehebung bei Speicherlecks helfen
Apr 12, 2025 pm 11:42 PM
Tomcat -Protokolle sind der Schlüssel zur Diagnose von Speicherleckproblemen. Durch die Analyse von Tomcat -Protokollen können Sie Einblicke in das Verhalten des Speicherverbrauchs und des Müllsammlung (GC) erhalten und Speicherlecks effektiv lokalisieren und auflösen. Hier erfahren Sie, wie Sie Speicherlecks mit Tomcat -Protokollen beheben: 1. GC -Protokollanalyse zuerst aktivieren Sie eine detaillierte GC -Protokollierung. Fügen Sie den Tomcat-Startparametern die folgenden JVM-Optionen hinzu: -xx: printgCDetails-xx: printgCDatESTAMPS-XLOGGC: GC.Log Diese Parameter generieren ein detailliertes GC-Protokoll (GC.Log), einschließlich Informationen wie GC-Typ, Recycling-Objektgröße und Zeit. Analyse gc.log
 So implementieren Sie die Dateisortierung nach Debian Readdir
Apr 13, 2025 am 09:06 AM
So implementieren Sie die Dateisortierung nach Debian Readdir
Apr 13, 2025 am 09:06 AM
In Debian -Systemen wird die Readdir -Funktion zum Lesen des Verzeichnisinhalts verwendet, aber die Reihenfolge, in der sie zurückgibt, ist nicht vordefiniert. Um Dateien in einem Verzeichnis zu sortieren, müssen Sie zuerst alle Dateien lesen und dann mit der QSORT -Funktion sortieren. Der folgende Code zeigt, wie Verzeichnisdateien mithilfe von Readdir und QSORT in Debian System sortiert werden:#include#include#include#include // benutzerdefinierte Vergleichsfunktion, verwendet für QSortIntCompare (constvoid*a, constvoid*b) {rettrcmp (*(*(*(
 So optimieren Sie die Leistung von Debian Readdir
Apr 13, 2025 am 08:48 AM
So optimieren Sie die Leistung von Debian Readdir
Apr 13, 2025 am 08:48 AM
In Debian -Systemen werden Readdir -Systemaufrufe zum Lesen des Verzeichnisinhalts verwendet. Wenn seine Leistung nicht gut ist, probieren Sie die folgende Optimierungsstrategie aus: Vereinfachen Sie die Anzahl der Verzeichnisdateien: Teilen Sie große Verzeichnisse so weit wie möglich in mehrere kleine Verzeichnisse auf und reduzieren Sie die Anzahl der gemäß Readdir -Anrufe verarbeiteten Elemente. Aktivieren Sie den Verzeichnis -Inhalt Caching: Erstellen Sie einen Cache -Mechanismus, aktualisieren Sie den Cache regelmäßig oder bei Änderungen des Verzeichnisinhalts und reduzieren Sie häufige Aufrufe an Readdir. Speicher -Caches (wie Memcached oder Redis) oder lokale Caches (wie Dateien oder Datenbanken) können berücksichtigt werden. Nehmen Sie eine effiziente Datenstruktur an: Wenn Sie das Verzeichnis -Traversal selbst implementieren, wählen Sie effizientere Datenstrukturen (z.
 So konfigurieren Sie Firewall -Regeln für Debian Syslog
Apr 13, 2025 am 06:51 AM
So konfigurieren Sie Firewall -Regeln für Debian Syslog
Apr 13, 2025 am 06:51 AM
In diesem Artikel wird beschrieben, wie Sie Firewall -Regeln mit Iptables oder UFW in Debian -Systemen konfigurieren und Syslog verwenden, um Firewall -Aktivitäten aufzuzeichnen. Methode 1: Verwenden Sie IptableSiptables ist ein leistungsstarkes Befehlszeilen -Firewall -Tool im Debian -System. Vorhandene Regeln anzeigen: Verwenden Sie den folgenden Befehl, um die aktuellen IPTables-Regeln anzuzeigen: Sudoiptables-L-N-V Ermöglicht spezifische IP-Zugriff: ZBELTE IP-Adresse 192.168.1.100 Zugriff auf Port 80: sudoiptables-ainput-ptcp--dort80-s192.16
 Wie man Debian Syslog lernt
Apr 13, 2025 am 11:51 AM
Wie man Debian Syslog lernt
Apr 13, 2025 am 11:51 AM
In diesem Leitfaden werden Sie erfahren, wie Sie Syslog in Debian -Systemen verwenden. Syslog ist ein Schlüsseldienst in Linux -Systemen für Protokollierungssysteme und Anwendungsprotokollnachrichten. Es hilft den Administratoren, die Systemaktivitäten zu überwachen und zu analysieren, um Probleme schnell zu identifizieren und zu lösen. 1. Grundkenntnisse über syslog Die Kernfunktionen von Syslog umfassen: zentrales Sammeln und Verwalten von Protokollnachrichten; Unterstützung mehrerer Protokoll -Ausgabesformate und Zielorte (z. B. Dateien oder Netzwerke); Bereitstellung von Echtzeit-Protokoll- und Filterfunktionen. 2. Installieren und Konfigurieren von Syslog (mit Rsyslog) Das Debian -System verwendet standardmäßig Rsyslog. Sie können es mit dem folgenden Befehl installieren: sudoaptupdatesud
 Debian Mail Server SSL -Zertifikat -Installationsmethode
Apr 13, 2025 am 11:39 AM
Debian Mail Server SSL -Zertifikat -Installationsmethode
Apr 13, 2025 am 11:39 AM
Die Schritte zur Installation eines SSL -Zertifikats auf dem Debian Mail -Server sind wie folgt: 1. Installieren Sie zuerst das OpenSSL -Toolkit und stellen Sie sicher, dass das OpenSSL -Toolkit bereits in Ihrem System installiert ist. Wenn nicht installiert, können Sie den folgenden Befehl installieren: sudoapt-getupdatesudoapt-getinstallopenssl2. Generieren Sie den privaten Schlüssel und die Zertifikatanforderung als nächst
 Wo ist der Debian Nginx Log Path
Apr 12, 2025 pm 11:33 PM
Wo ist der Debian Nginx Log Path
Apr 12, 2025 pm 11:33 PM
Im Debian -System sind die Standardspeicherorte des Zugriffsprotokolls von NGINX wie folgt wie folgt: Zugriffsprotokoll (AccessLog):/var/log/nginx/access.log Fehlerprotokoll (FehlerLog):/var/log/nginx/fehler Wenn Sie den Speicherort der Protokolldatei während des Installationsprozesses geändert haben, überprüfen Sie bitte Ihre Nginx-Konfigurationsdatei (normalerweise in /etc/nginx/nginx.conf oder/etc/nginx/seiten-AVailable/Verzeichnis). In der Konfigurationsdatei
