
 Technologie-Peripheriegeräte
KI
Wie wählen CV-Praktiker in der Post-Sora-Ära Modelle aus? Faltung oder ViT, überwachtes Lernen oder CLIP-Paradigma
Technologie-Peripheriegeräte
KI
Wie wählen CV-Praktiker in der Post-Sora-Ära Modelle aus? Faltung oder ViT, überwachtes Lernen oder CLIP-Paradigma
Wie wählen CV-Praktiker in der Post-Sora-Ära Modelle aus? Faltung oder ViT, überwachtes Lernen oder CLIP-Paradigma

Die ImageNet-Genauigkeit war einst der Hauptindikator zur Bewertung der Modellleistung, aber im heutigen rechnerischen Sichtfeld scheint dieser Indikator allmählich unvollständig zu sein.
Da Computer-Vision-Modelle komplexer geworden sind, hat die Vielfalt der verfügbaren Modelle erheblich zugenommen, von ConvNets bis hin zu Vision Transformers. Die Trainingsmethoden haben sich auch zu selbstüberwachtem Lernen und Bild-Text-Paar-Training wie CLIP weiterentwickelt und sind nicht mehr auf überwachtes Training auf ImageNet beschränkt.
Obwohl die Genauigkeit von ImageNet ein wichtiger Indikator ist, reicht sie nicht aus, um die Leistung des Modells vollständig zu bewerten. Unterschiedliche Architekturen, Trainingsmethoden und Datensätze können dazu führen, dass Modelle bei verschiedenen Aufgaben unterschiedliche Leistungen erbringen. Daher kann es Einschränkungen geben, sich bei der Beurteilung von Modellen ausschließlich auf ImageNet zu verlassen. Wenn ein Modell den ImageNet-Datensatz überpasst und die Genauigkeit die Sättigung erreicht, wird die Generalisierungsfähigkeit des Modells für andere Aufgaben möglicherweise ignoriert. Daher müssen mehrere Faktoren berücksichtigt werden, um die Leistung und Anwendbarkeit des Modells zu bewerten.
Obwohl die ImageNet-Genauigkeit von CLIP der von ResNet ähnelt, ist der visuelle Encoder robuster und übertragbarer. Dies veranlasste die Forscher, die einzigartigen Vorteile von CLIP zu untersuchen, die bei der alleinigen Betrachtung von ImageNet-Metriken nicht offensichtlich waren. Dies unterstreicht die Bedeutung der Analyse anderer Eigenschaften, um nützliche Modelle zu entdecken.
Darüber hinaus können herkömmliche Benchmarks die Fähigkeit eines Modells, reale visuelle Herausforderungen wie verschiedene Kamerawinkel, Lichtverhältnisse oder Verdeckungen zu bewältigen, nicht vollständig bewerten. Modelle, die auf Datensätzen wie ImageNet trainiert werden, haben oft Schwierigkeiten, ihre Leistung in praktischen Anwendungen zu nutzen, da die Bedingungen und Szenarien in der realen Welt vielfältiger sind.
Diese Fragen haben bei Praktikern auf diesem Gebiet für neue Verwirrung gesorgt: Wie misst man ein visuelles Modell? Und wie wählt man ein visuelles Modell aus, das Ihren Anforderungen entspricht?
In einem aktuellen Artikel führten Forscher von MBZUAI und Meta eine ausführliche Diskussion zu diesem Thema.

- Papiertitel: ConvNet vs Transformer, Supervised vs CLIP: Beyond ImageNet Accuracy
- Papierlink: https://arxiv.org/pdf/2311.09215. pdf
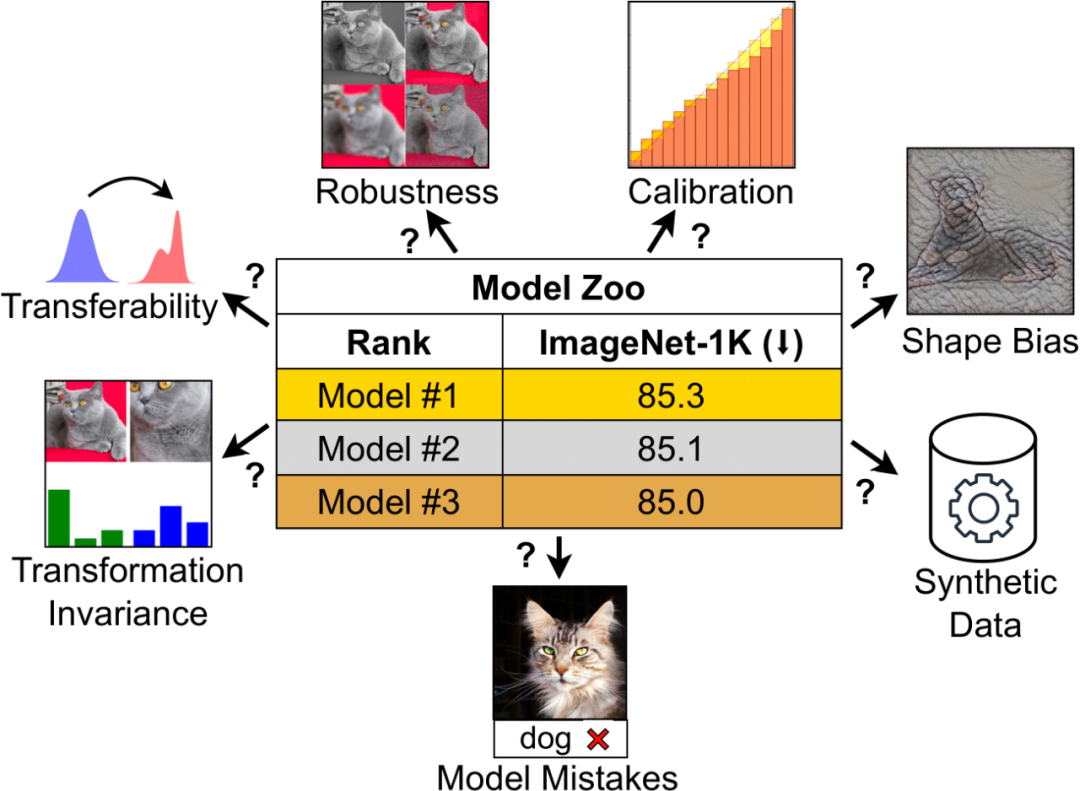
Die Forschung konzentriert sich auf das Modellverhalten, das über die ImageNet-Genauigkeit hinausgeht, und analysiert die Leistung wichtiger Modelle im Bereich Computer Vision, einschließlich ConvNeXt und Vision Transformer (ViT), die beide unter überwachter Leistung und CLIP-Trainingsparadigmen Leistung erbringen.
Die ausgewählten Modelle haben eine ähnliche Anzahl von Parametern und nahezu die gleiche Genauigkeit auf ImageNet-1K unter jedem Trainingsparadigma, was einen fairen Vergleich gewährleistet. Die Forscher untersuchten eine Reihe von Modellmerkmalen eingehend, wie z. B. Vorhersagefehlertyp, Generalisierungsfähigkeit, Invarianz erlernter Darstellungen, Kalibrierung usw., wobei sie sich auf die Merkmale des Modells ohne zusätzliches Training oder Feinabstimmung konzentrierten und hofften, direkt Referenzen bereitzustellen von Praktikern, die vorab trainierte Modelle verwenden.
In der Analyse stellten die Forscher fest, dass es erhebliche Unterschiede im Modellverhalten zwischen verschiedenen Architekturen und Trainingsparadigmen gibt. Beispielsweise führten Modelle, die nach dem CLIP-Paradigma trainiert wurden, zu weniger Klassifizierungsfehlern als Modelle, die mit ImageNet trainiert wurden. Das überwachte Modell ist jedoch besser kalibriert und übertrifft im Allgemeinen den ImageNet-Robustheitsbenchmark. ConvNeXt bietet Vorteile gegenüber synthetischen Daten, ist jedoch stärker texturorientiert als ViT. Mittlerweile schneidet das überwachte ConvNeXt bei vielen Benchmarks gut ab, wobei die Übertragbarkeitsleistung mit dem CLIP-Modell vergleichbar ist.
Es zeigt sich, dass verschiedene Modelle ihre Vorteile auf einzigartige Weise zeigen und diese Vorteile nicht durch einen einzigen Indikator erfasst werden können. Die Forscher betonen, dass detailliertere Bewertungsmetriken erforderlich sind, um Modelle in bestimmten Kontexten genau auszuwählen und neue ImageNet-agnostische Benchmarks zu erstellen.
Basierend auf diesen Beobachtungen hat der Chefwissenschaftler von Meta AI, Yann LeCun, die Studie retweetet und ihr gefallen:

Modellauswahl
Für das überwachte Modell verwendeten die Forscher das vorab trainierte DeiT3-Base/16 von ViT, das die gleiche Architektur wie ViT-Base/16 hat, aber die Trainingsmethode wurde zusätzlich verbessert; -Basis wurde verwendet. Für das CLIP-Modell verwendeten die Forscher die visuellen Encoder von ViT-Base/16 und ConvNeXt-Base in OpenCLIP.
Bitte beachten Sie, dass die Leistung dieser Modelle geringfügig vom ursprünglichen OpenAI-Modell abweicht. Alle Modellprüfpunkte finden Sie auf der GitHub-Projekthomepage. Der detaillierte Modellvergleich ist in Tabelle 1 dargestellt:

Für den Modellauswahlprozess gab der Forscher eine detaillierte Erklärung:
1. Da der Forscher ein vorab trainiertes Modell verwendet, kann er das nicht kontrollieren Trainingszeitraum. Die Quantität und Qualität der gesehenen Datenproben.
2. Um ConvNets und Transformers zu analysieren, wurden in vielen früheren Studien ResNet und ViT verglichen. Dieser Vergleich geht im Allgemeinen gegen ConvNet, da ViT typischerweise mit fortgeschritteneren Rezepten trainiert wird und eine höhere ImageNet-Genauigkeit erreicht. ViT verfügt auch über einige architektonische Designelemente, wie z. B. LayerNorm, die bei seiner Erfindung vor vielen Jahren nicht in ResNet integriert waren. Für eine ausgewogenere Bewertung haben wir daher ViT mit ConvNeXt verglichen, einem modernen Vertreter von ConvNet, der mit Transformers vergleichbare Leistungen erbringt und viele Designs teilt.
3. Was den Trainingsmodus betrifft, verglichen die Forscher den überwachten Modus und den CLIP-Modus. Überwachte Modelle haben die Leistung auf dem neuesten Stand der Technik im Bereich Computer Vision gehalten. CLIP-Modelle hingegen schneiden hinsichtlich Generalisierung und Übertragbarkeit gut ab und stellen Eigenschaften zur Verbindung visueller und sprachlicher Darstellungen bereit.
4. Da das selbstüberwachte Modell in Vorversuchen ein ähnliches Verhalten zeigte wie das überwachte Modell, wurde es nicht in die Ergebnisse einbezogen. Dies kann auf die Tatsache zurückzuführen sein, dass sie letztendlich auf ImageNet-1K optimiert wurden, was sich auf das Studium vieler Funktionen auswirkt.
Als nächstes werfen wir einen Blick darauf, wie Forscher verschiedene Attribute analysiert haben.
Analyse
Modellfehler
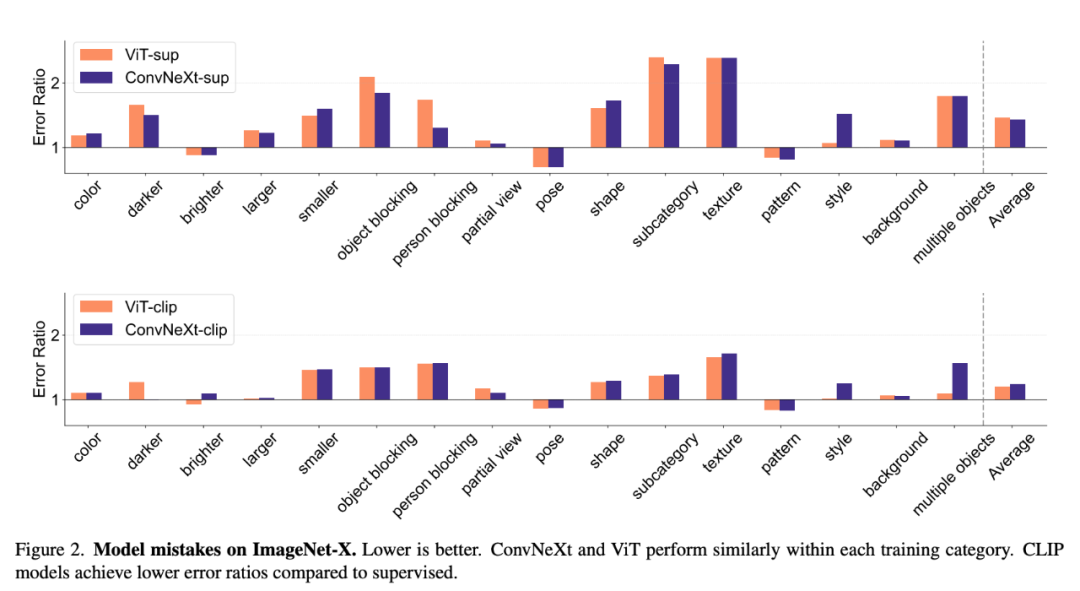
ImageNet-X ist ein Datensatz, der ImageNet-1K erweitert und detaillierte menschliche Anmerkungen zu 16 sich ändernden Faktoren zur Klassifizierung von Bildern enthält. Führen Sie eine eingehende Analyse von Modellfehlern durch In . Es verwendet eine Fehlerverhältnismetrik (je niedriger, desto besser), um die Leistung eines Modells in Bezug auf bestimmte Faktoren im Verhältnis zur Gesamtgenauigkeit zu quantifizieren, was eine differenzierte Analyse von Modellfehlern ermöglicht. Ergebnisse auf ImageNet-X zeigen:
1. Im Vergleich zu überwachten Modellen machen CLIP-Modelle weniger Fehler in der ImageNet-Genauigkeit.
2. Alle Modelle sind hauptsächlich von komplexen Faktoren wie Okklusion betroffen.
3. Die Textur ist der anspruchsvollste Faktor aller Modelle.
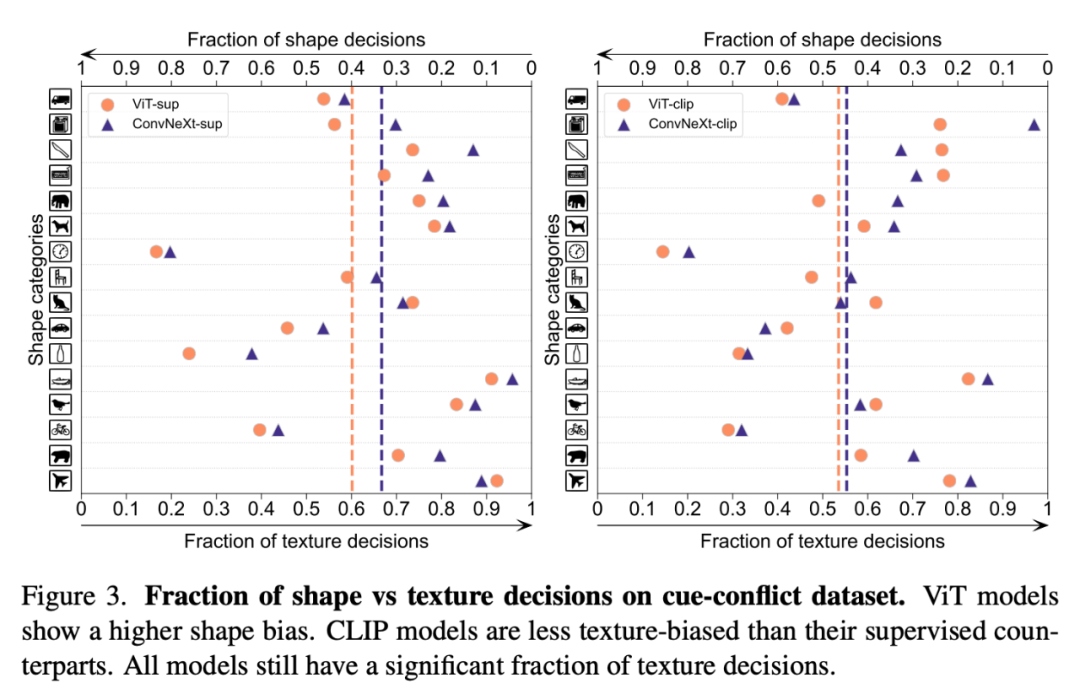
Form-/Texturverzerrung
Die Form-Texturverzerrung erkennt, ob ein Modell auf fragilen Texturverknüpfungen anstelle von Formhinweisen auf hoher Ebene basiert. Diese Verzerrung kann untersucht werden, indem Bilder unterschiedlicher Formen- und Texturkategorien kombiniert werden, bei denen Hinweise widersprüchlich sind. Dieser Ansatz hilft zu verstehen, inwieweit die Entscheidungen eines Modells auf der Form im Vergleich zur Textur basieren. Die Forscher bewerteten die Form-Textur-Verzerrung im Cue-Konflikt-Datensatz und stellten fest, dass die Textur-Verzerrung des CLIP-Modells kleiner war als die des überwachten Modells, während die Form-Verzerrung des ViT-Modells höher war als die von ConvNets.
Modellkalibrierung
Durch die Kalibrierung kann quantifiziert werden, ob die Vorhersagesicherheit des Modells mit seiner tatsächlichen Genauigkeit übereinstimmt, die anhand von Indikatoren wie dem erwarteten Kalibrierungsfehler (ECE) gemessen werden kann Zuverlässigkeitsdiagramme und Konfidenzhistogramme. Visuelle Tools zur Bewertung. Die Kalibrierung wurde auf ImageNet-1K und ImageNet-R ausgewertet und die Vorhersagen in 15 Stufen klassifiziert. Während des Experiments beobachteten die Forscher folgende Punkte:
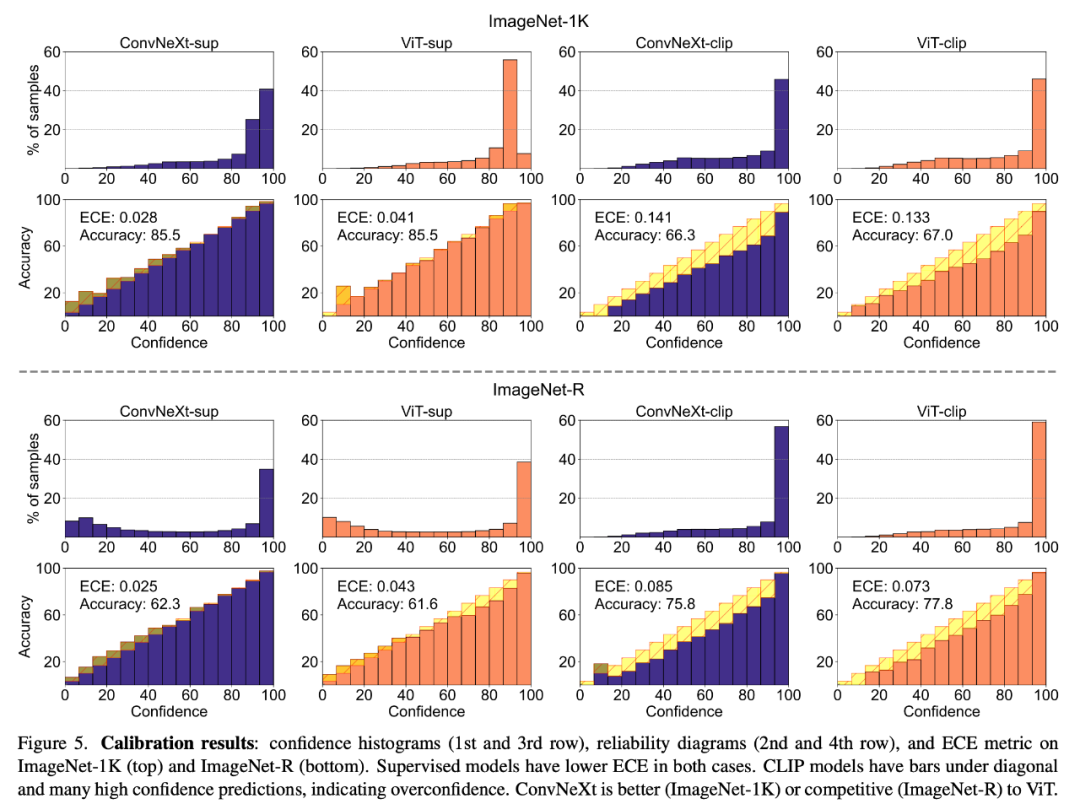
1. Das CLIP-Modell ist zu selbstsicher, während das überwachte Modell leicht zu wenig Selbstvertrauen hat.
2. Überwachtes ConvNeXt führt eine bessere Kalibrierung durch als überwachtes ViT.
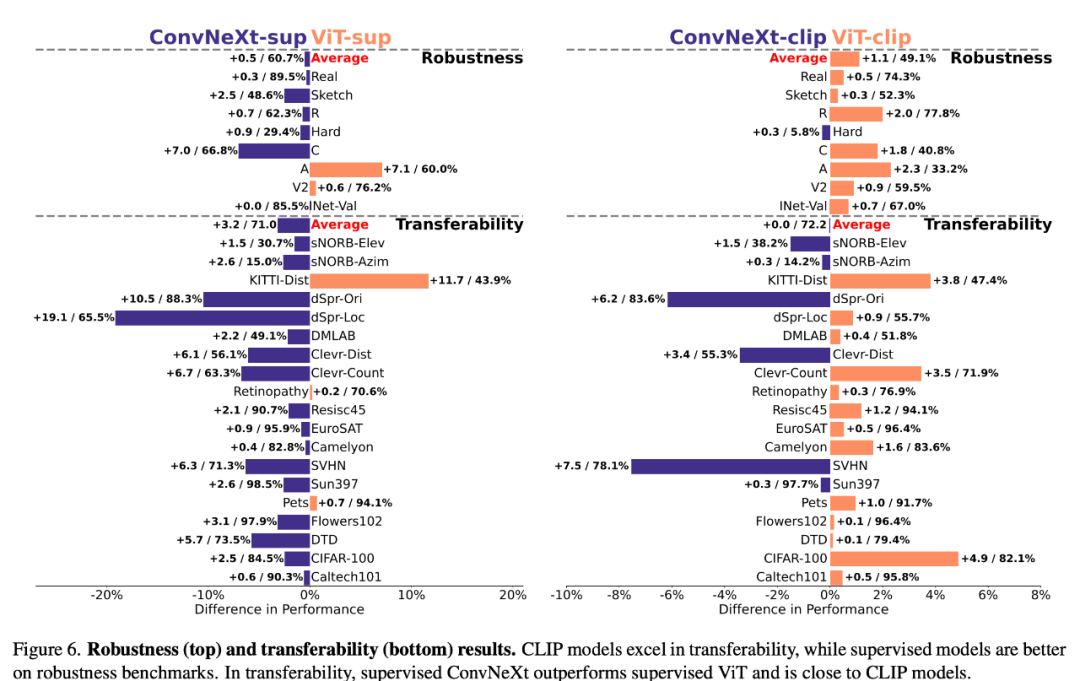
Robustheit und Übertragbarkeit
Robustheit und Übertragbarkeit des Modells sind entscheidend für die Anpassung an Änderungen in der Datenverteilung und neue Aufgaben. Die Forscher bewerteten die Robustheit anhand verschiedener ImageNet-Varianten und stellten fest, dass die durchschnittliche Leistung von ViT- und ConvNeXt-Modellen mit Ausnahme von ImageNet-R und ImageNet-Sketch zwar vergleichbar war, die überwachten Modelle jedoch im Allgemeinen CLIP in Bezug auf die Robustheit übertrafen. In Bezug auf die Übertragbarkeit übertrifft das überwachte ConvNeXt ViT und liegt fast auf Augenhöhe mit der Leistung des CLIP-Modells, wie anhand des VTAB-Benchmarks anhand von 19 Datensätzen bewertet.
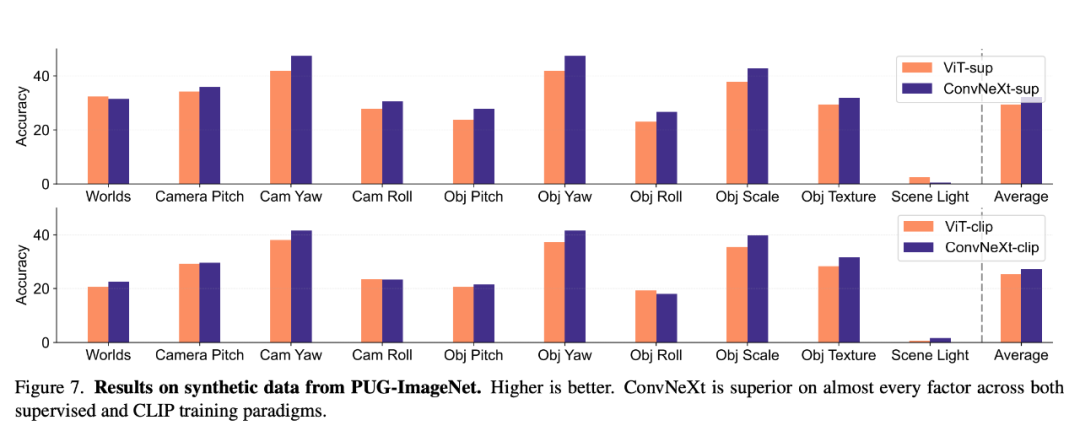
Synthetische Daten
PUG-ImageNet und andere synthetische Datensätze können Faktoren wie Kamerawinkel und Textur genau steuern. Dies ist ein vielversprechender Forschungsweg, daher analysierten die Forscher die Fähigkeit des Modells zur Synthese Leistung auf Daten. PUG-ImageNet enthält fotorealistische ImageNet-Bilder mit systematischen Variationen in Faktoren wie Pose und Beleuchtung, und die Leistung wird als absolute Top-1-Genauigkeit gemessen. Die Forscher liefern Ergebnisse zu verschiedenen Faktoren in PUG-ImageNet und stellen fest, dass ConvNeXt ViT in fast allen Faktoren übertrifft. Dies zeigt, dass ConvNeXt ViT bei synthetischen Daten übertrifft, während die Lücke für das CLIP-Modell kleiner ist, da die Genauigkeit des CLIP-Modells geringer ist als die des überwachten Modells, was möglicherweise mit der geringeren Genauigkeit des ursprünglichen ImageNet zusammenhängt.
Transformationsinvarianz
Transformationsinvarianz bezieht sich auf die Fähigkeit des Modells, konsistente Darstellungen zu erzeugen, die nicht durch Eingabetransformationen wie Skalierung oder Bewegung beeinflusst werden und dabei die Semantik beibehalten. Diese Eigenschaft ermöglicht eine gute Verallgemeinerung des Modells auf verschiedene, aber semantisch ähnliche Eingaben. Zu den verwendeten Methoden gehören die Größenänderung von Bildern für Skaleninvarianz, das Verschieben von Ausschnitten für Positionsinvarianz und die Anpassung der Auflösung von ViT-Modellen mithilfe interpolierter Positionseinbettungen.
Sie bewerteten Maßstabs-, Bewegungs- und Auflösungsinvarianz auf ImageNet-1K durch Variation von Zuschnittsmaßstab/-position und Bildauflösung. ConvNeXt übertrifft ViT im betreuten Training. Insgesamt ist das Modell robuster gegenüber Skalierungs-/Auflösungstransformationen als gegenüber Bewegungen. Für Anwendungen, die eine hohe Robustheit gegenüber Skalierung, Verschiebung und Auflösung erfordern, deuten die Ergebnisse darauf hin, dass überwachtes ConvNeXt möglicherweise die beste Wahl ist.

Zusammenfassung
Insgesamt hat jedes Modell seine eigenen einzigartigen Vorteile. Dies legt nahe, dass die Wahl des Modells vom Zielanwendungsfall abhängen sollte, da Standardleistungsmetriken möglicherweise kritische Nuancen einer bestimmten Aufgabe ignorieren. Darüber hinaus sind viele bestehende Benchmarks von ImageNet abgeleitet, was die Bewertung ebenfalls verzerrt. Die Entwicklung neuer Benchmarks mit unterschiedlichen Datenverteilungen ist von entscheidender Bedeutung, um Modelle in einer realistischeren repräsentativen Umgebung zu bewerten.
Das Folgende ist eine Zusammenfassung der Schlussfolgerungen dieses Artikels:
ConvNet mit Transformer
1. Supervised ConvNeXt übertrifft Supervised ViT bei vielen Benchmarks: Es ist besser kalibriert und invarianter Datentransformationen und weist eine bessere Portabilität und Robustheit auf.
2. ConvNeXt schneidet bei synthetischen Daten besser ab als ViT.
3. ViT weist eine größere Formabweichung auf.
Supervision vs. CLIP
1 Obwohl das CLIP-Modell hinsichtlich der Übertragbarkeit überlegen ist, schneidet das überwachte ConvNeXt bei dieser Aufgabe konkurrenzfähig ab. Dies zeigt das Potenzial überwachter Modelle.
2. Überwachte Modelle schneiden bei Robustheits-Benchmarks besser ab, wahrscheinlich weil es sich bei diesen Modellen allesamt um ImageNet-Varianten handelt.
3. Das CLIP-Modell weist im Vergleich zur Genauigkeit von ImageNet eine größere Formverzerrung und weniger Klassifizierungsfehler auf.
Das obige ist der detaillierte Inhalt vonWie wählen CV-Praktiker in der Post-Sora-Ära Modelle aus? Faltung oder ViT, überwachtes Lernen oder CLIP-Paradigma. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI verändert tatsächlich die Mathematik. Vor kurzem hat Tao Zhexuan, der diesem Thema große Aufmerksamkeit gewidmet hat, die neueste Ausgabe des „Bulletin of the American Mathematical Society“ (Bulletin der American Mathematical Society) weitergeleitet. Zum Thema „Werden Maschinen die Mathematik verändern?“ äußerten viele Mathematiker ihre Meinung. Der gesamte Prozess war voller Funken, knallhart und aufregend. Der Autor verfügt über eine starke Besetzung, darunter der Fields-Medaillengewinner Akshay Venkatesh, der chinesische Mathematiker Zheng Lejun, der NYU-Informatiker Ernest Davis und viele andere bekannte Wissenschaftler der Branche. Die Welt der KI hat sich dramatisch verändert. Viele dieser Artikel wurden vor einem Jahr eingereicht.
 Jenseits von ORB-SLAM3! SL-SLAM: Szenen mit wenig Licht, starkem Jitter und schwacher Textur werden verarbeitet
May 30, 2024 am 09:35 AM
Jenseits von ORB-SLAM3! SL-SLAM: Szenen mit wenig Licht, starkem Jitter und schwacher Textur werden verarbeitet
May 30, 2024 am 09:35 AM
Heute diskutieren wir darüber, wie Deep-Learning-Technologie die Leistung von visionbasiertem SLAM (Simultaneous Localization and Mapping) in komplexen Umgebungen verbessern kann. Durch die Kombination von Methoden zur Tiefenmerkmalsextraktion und Tiefenanpassung stellen wir hier ein vielseitiges hybrides visuelles SLAM-System vor, das die Anpassung in anspruchsvollen Szenarien wie schlechten Lichtverhältnissen, dynamischer Beleuchtung, schwach strukturierten Bereichen und starkem Jitter verbessern soll. Unser System unterstützt mehrere Modi, einschließlich erweiterter Monokular-, Stereo-, Monokular-Trägheits- und Stereo-Trägheitskonfigurationen. Darüber hinaus wird analysiert, wie visuelles SLAM mit Deep-Learning-Methoden kombiniert werden kann, um andere Forschungen zu inspirieren. Durch umfangreiche Experimente mit öffentlichen Datensätzen und selbst abgetasteten Daten demonstrieren wir die Überlegenheit von SL-SLAM in Bezug auf Positionierungsgenauigkeit und Tracking-Robustheit.
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Google ist begeistert: JAX-Leistung übertrifft Pytorch und TensorFlow! Es könnte die schnellste Wahl für das GPU-Inferenztraining werden
Apr 01, 2024 pm 07:46 PM
Die von Google geförderte Leistung von JAX hat in jüngsten Benchmark-Tests die von Pytorch und TensorFlow übertroffen und belegt bei 7 Indikatoren den ersten Platz. Und der Test wurde nicht auf der TPU mit der besten JAX-Leistung durchgeführt. Obwohl unter Entwicklern Pytorch immer noch beliebter ist als Tensorflow. Aber in Zukunft werden möglicherweise mehr große Modelle auf Basis der JAX-Plattform trainiert und ausgeführt. Modelle Kürzlich hat das Keras-Team drei Backends (TensorFlow, JAX, PyTorch) mit der nativen PyTorch-Implementierung und Keras2 mit TensorFlow verglichen. Zunächst wählen sie eine Reihe von Mainstream-Inhalten aus
 Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Das neueste Video von Teslas Roboter Optimus ist veröffentlicht und er kann bereits in der Fabrik arbeiten. Bei normaler Geschwindigkeit sortiert es Batterien (Teslas 4680-Batterien) so: Der Beamte hat auch veröffentlicht, wie es bei 20-facher Geschwindigkeit aussieht – auf einer kleinen „Workstation“, pflücken und pflücken und pflücken: Dieses Mal wird es freigegeben. Eines der Highlights Der Vorteil des Videos besteht darin, dass Optimus diese Arbeit in der Fabrik völlig autonom und ohne menschliches Eingreifen während des gesamten Prozesses erledigt. Und aus Sicht von Optimus kann es auch die krumme Batterie aufnehmen und platzieren, wobei der Schwerpunkt auf der automatischen Fehlerkorrektur liegt: In Bezug auf die Hand von Optimus gab der NVIDIA-Wissenschaftler Jim Fan eine hohe Bewertung ab: Die Hand von Optimus ist der fünffingrige Roboter der Welt am geschicktesten. Seine Hände sind nicht nur taktil
 FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: der erste Zielerkennungsalgorithmus basierend auf einer Fischaugenkamera
Apr 26, 2024 am 11:37 AM
Die Zielerkennung ist ein relativ ausgereiftes Problem in autonomen Fahrsystemen, wobei die Fußgängererkennung einer der ersten Algorithmen ist, die eingesetzt werden. In den meisten Arbeiten wurde eine sehr umfassende Recherche durchgeführt. Die Entfernungswahrnehmung mithilfe von Fischaugenkameras für die Rundumsicht ist jedoch relativ wenig untersucht. Aufgrund der großen radialen Verzerrung ist es schwierig, die standardmäßige Bounding-Box-Darstellung in Fischaugenkameras zu implementieren. Um die obige Beschreibung zu vereinfachen, untersuchen wir erweiterte Begrenzungsrahmen-, Ellipsen- und allgemeine Polygondesigns in Polar-/Winkeldarstellungen und definieren eine mIOU-Metrik für die Instanzsegmentierung, um diese Darstellungen zu analysieren. Das vorgeschlagene Modell „fisheyeDetNet“ mit polygonaler Form übertrifft andere Modelle und erreicht gleichzeitig 49,5 % mAP auf dem Valeo-Fisheye-Kameradatensatz für autonomes Fahren
