
 Technologie-Peripheriegeräte
KI
OccFusion: Ein einfaches und effektives Multisensor-Fusion-Framework für Occ (Performance SOTA)
Technologie-Peripheriegeräte
KI
OccFusion: Ein einfaches und effektives Multisensor-Fusion-Framework für Occ (Performance SOTA)
OccFusion: Ein einfaches und effektives Multisensor-Fusion-Framework für Occ (Performance SOTA)

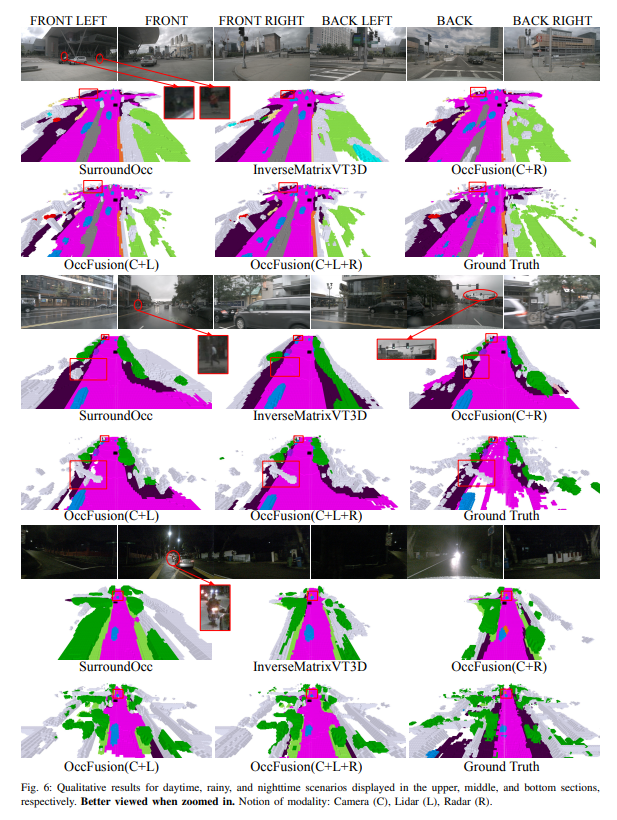
Ein umfassendes Verständnis von 3D-Szenen ist beim autonomen Fahren von entscheidender Bedeutung, und neuere semantische 3D-Belegungsvorhersagemodelle haben die Herausforderung, reale Objekte mit unterschiedlichen Formen und Kategorien zu beschreiben, erfolgreich gemeistert. Bestehende 3D-Belegungsvorhersagemethoden basieren jedoch stark auf Panoramakamerabildern, was sie anfällig für Änderungen der Licht- und Wetterbedingungen macht. Durch die Integration der Funktionen zusätzlicher Sensoren wie Lidar und Rundumsichtradar verbessert unser Framework die Genauigkeit und Robustheit der Belegungsvorhersage, was zu einer Spitzenleistung im nuScenes-Benchmark führt. Darüber hinaus bestätigen umfangreiche Experimente mit dem nuScene-Datensatz, einschließlich anspruchsvoller Nacht- und Regenszenen, die überlegene Leistung unserer Sensorfusionsstrategie über verschiedene Erfassungsbereiche hinweg.
Link zum Dokument: https://arxiv.org/pdf/2403.01644.pdf
Name des Dokuments: OccFusion: A Straightforward and Effective Multi-Sensor Fusion Framework for 3D Occupancy Prediction
Die Hauptbeiträge dieses Artikels sind wie folgt zusammengefasst :
- Es wird ein Multisensor-Fusionsframework vorgeschlagen, um Kamera-, Lidar- und Radarinformationen zu integrieren, um semantische 3D-Belegungsvorhersageaufgaben durchzuführen.
- In der semantischen 3D-Belegungsvorhersageaufgabe wird unsere Methode mit anderen hochmodernen (SOTA)-Algorithmen verglichen, um die Vorteile der Multisensorfusion zu demonstrieren.
- Es wurden gründliche Ablationsstudien durchgeführt, um die Leistungssteigerungen zu bewerten, die durch verschiedene Sensorkombinationen unter schwierigen Licht- und Wetterbedingungen wie Nacht und Regen erzielt werden.
- Eine umfassende Studie wurde durchgeführt, um den Einfluss von Wahrnehmungsbereichsfaktoren auf die Leistung unseres Frameworks bei semantischen 3D-Belegungsvorhersageaufgaben zu analysieren, wobei verschiedene Sensorkombinationen und anspruchsvolle Szenarien berücksichtigt wurden!
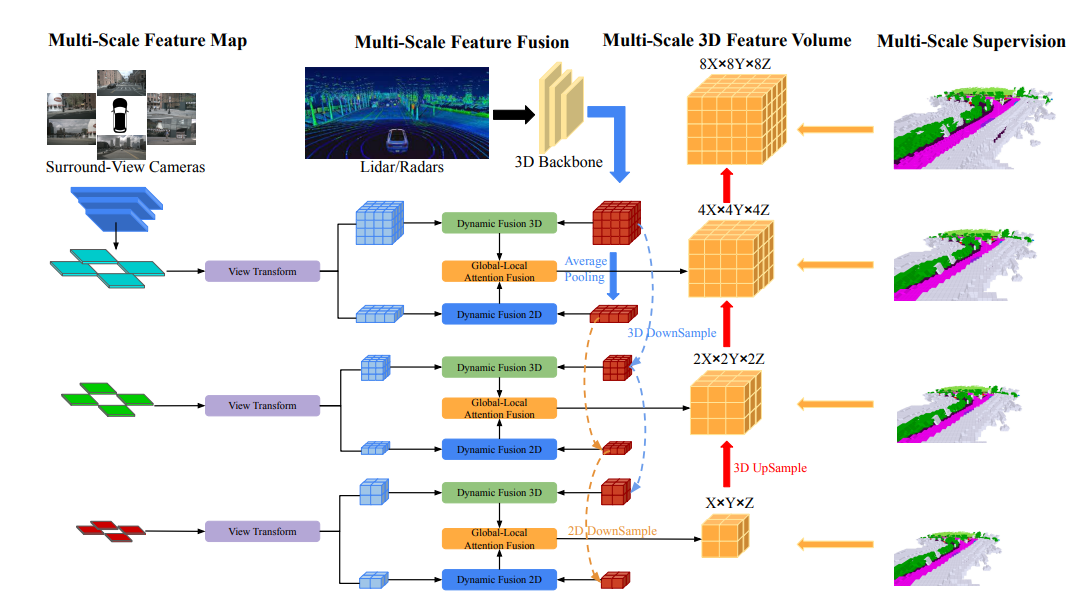
Übersicht über die Netzwerkstruktur
Die Gesamtarchitektur von OccFusion ist wie folgt. Zunächst werden Rundumsichtbilder in ein 2D-Backbone eingegeben, um mehrskalige Merkmale zu extrahieren. Anschließend wird in jedem Maßstab eine Ansichtstransformation durchgeführt, um globale BEV-Features und lokales 3D-Feature-Volumen auf jeder Ebene zu erhalten. Die von Lidar und Surround-Radar erzeugten 3D-Punktwolken werden auch in das 3D-Backbone eingegeben, um mehrskalige lokale 3D-Feature-Mengen und globale BEV-Features zu generieren. Dynamische Fusions-3D/2D-Module auf jeder Ebene kombinieren die Fähigkeiten von Kameras und Lidar/Radar. Danach werden die zusammengeführten globalen BEV-Features und das lokale 3D-Feature-Volumen auf jeder Ebene in die global-lokale Aufmerksamkeitsfusion eingespeist, um das endgültige 3D-Volumen auf jeder Skala zu erzeugen. Schließlich wird das 3D-Volumen auf jeder Ebene mit einem Multiskalen-Überwachungsmechanismus hochgesampelt und übersprungsverbunden.
Experimentelle Vergleichsanalyse
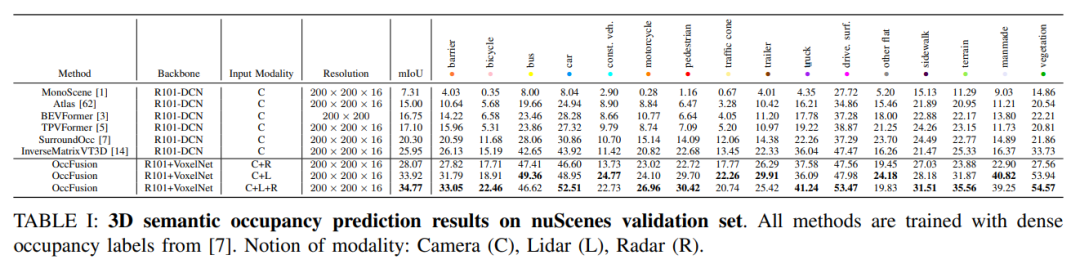
Auf dem nuScenes-Validierungssatz werden die Ergebnisse verschiedener Methoden demonstriert, die auf dem Training dichter Belegungsbezeichnungen in der semantischen 3D-Belegungsvorhersage basieren. Diese Methoden umfassen verschiedene modale Konzepte, darunter Kamera (C), Lidar (L) und Radar (R).
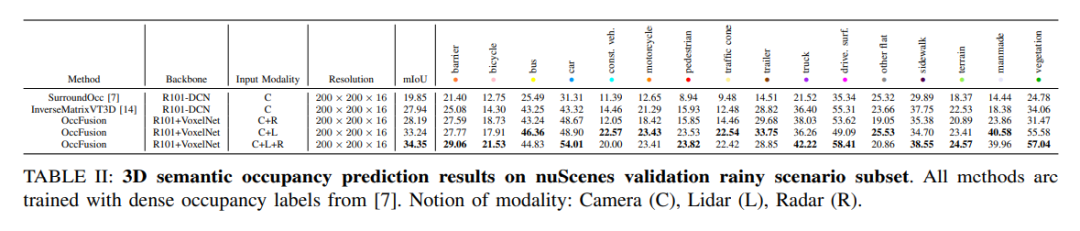
Für die Regenszenen-Teilmenge des nuScenes-Datensatzes sagen wir die semantische 3D-Belegung voraus und verwenden dichte Belegungsbezeichnungen für das Training. In diesem Experiment haben wir Daten von verschiedenen Modalitäten wie Kamera (C), Lidar (L), Radar (R) usw. berücksichtigt. Die Fusion dieser Modi kann uns helfen, Regenszenen besser zu verstehen und vorherzusagen, und stellt eine wichtige Referenz für die Entwicklung autonomer Fahrsysteme dar.
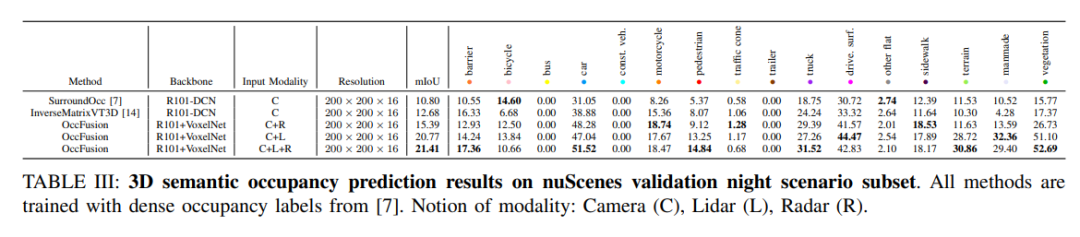
nuScenes validiert semantische 3D-Belegungsvorhersageergebnisse für eine Teilmenge von Nachtszenen. Alle Methoden werden mithilfe dichter Belegungsetiketten trainiert. Modale Konzepte: Kamera (C), Lidar (L), Radar (R).
Leistungsänderungstrends. (a) Leistungsänderungstrend des gesamten nuScenes-Validierungssatzes, (b) nuScenes-Validierungsnachtszenen-Teilsatz und (c) nuScene-Validierungsleistungsänderungstrend des Regenszenen-Teilsatzes.
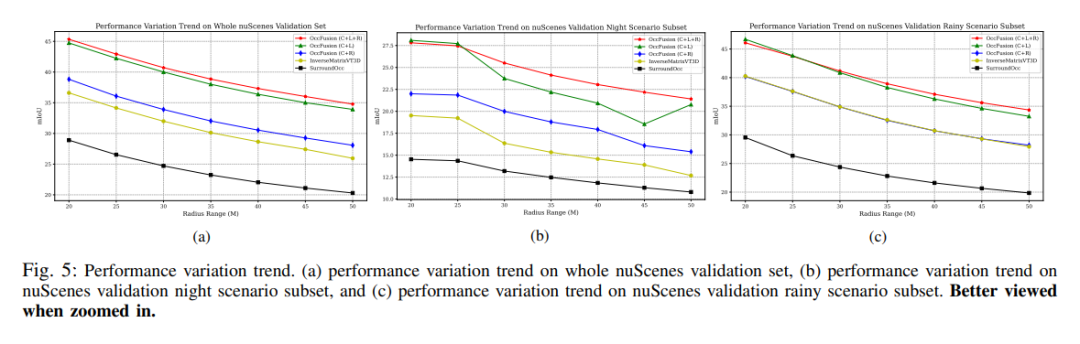
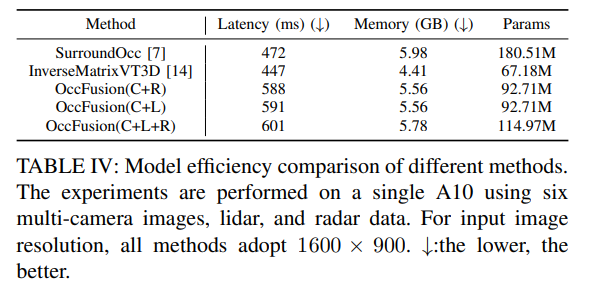
Tabelle 4: Vergleich der Modelleffizienz verschiedener Methoden. Auf einem A10 wurden Experimente mit sechs Multikamerabildern sowie Lidar- und Radardaten durchgeführt. Für die Auflösung des Eingabebildes verwenden alle Methoden 1600×900. ↓:Je niedriger desto besser.
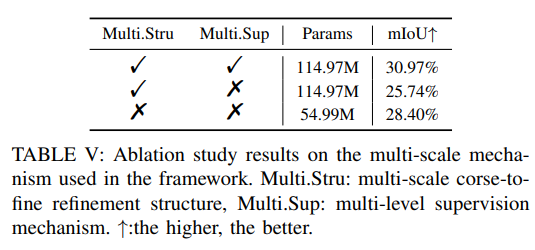
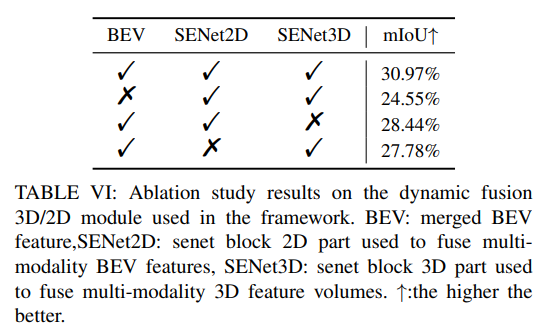
Weitere Ablationsexperimente:
Das obige ist der detaillierte Inhalt vonOccFusion: Ein einfaches und effektives Multisensor-Fusion-Framework für Occ (Performance SOTA). Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1378
1378
 52
52

 Wow cool! Samsung Galaxy Ring-Erlebnis: 2999 Yuan echter Smart Ring
Jul 19, 2024 pm 02:31 PM
Wow cool! Samsung Galaxy Ring-Erlebnis: 2999 Yuan echter Smart Ring
Jul 19, 2024 pm 02:31 PM
Samsung hat am 17. Juli offiziell die nationale Version des Samsung Galaxy Ring zum Preis von 2.999 Yuan veröffentlicht. Das echte Telefon des Galaxy Ring ist wirklich die 2024-Version von „WowAwesome, das ist mein exklusiver Moment“. Es ist das elektronische Produkt, das uns in den letzten Jahren das frischeste Gefühl gibt (obwohl es wie eine Flagge klingt). (Im Bild sind die Ringe links und rechts Galaxy Ring ↑) Samsung Galaxy Ring-Spezifikationen (Daten von der offiziellen Website der Bank of China): ZephyrRTOS-System, 8 MB wasserdicht + IP68; Batteriekapazität 18 mAh mAh (verschiedene Größen
 Upgrade auf Vollbild! Das iPhone SE4 ist auf September vorgerückt
Jul 24, 2024 pm 12:56 PM
Upgrade auf Vollbild! Das iPhone SE4 ist auf September vorgerückt
Jul 24, 2024 pm 12:56 PM
Kürzlich wurden auf Weibo neue Neuigkeiten zum iPhone SE4 enthüllt. Es heißt, dass der Backcover-Prozess des iPhone SE4 genau derselbe ist wie der der iPhone 16-Standardversion. Mit anderen Worten, das iPhone SE4 wird eine Glasrückwand verwenden gerader Bildschirm und gerades Kantendesign. Es wird berichtet, dass das iPhone SE4 vor September dieses Jahres auf den Markt kommen wird, was bedeutet, dass es wahrscheinlich gleichzeitig mit dem iPhone 16 vorgestellt wird. 1. Den belichteten Renderings zufolge ähnelt das Frontdesign des iPhone SE4 dem des iPhone 13, mit einer Frontkamera und einem FaceID-Sensor auf dem Notch-Bildschirm. Die Rückseite weist ein ähnliches Layout wie das iPhoneXr auf, verfügt jedoch nur über eine Kamera und kein umfassendes Kameramodul.
 Vollständige Codenamen der Xiaomi 15-Serie enthüllt: Dada, Haotian, Xuanyuan
Aug 22, 2024 pm 06:47 PM
Vollständige Codenamen der Xiaomi 15-Serie enthüllt: Dada, Haotian, Xuanyuan
Aug 22, 2024 pm 06:47 PM
Die offizielle Veröffentlichung der Xiaomi Mi 15-Serie wird im Oktober erwartet, und die vollständigen Codenamen der Serie wurden in der MiCode-Codebasis ausländischer Medien veröffentlicht. Unter ihnen trägt das Flaggschiff Xiaomi Mi 15 Ultra den Codenamen „Xuanyuan“ (was „Xuanyuan“ bedeutet). Dieser Name stammt vom Gelben Kaiser in der chinesischen Mythologie, der Adel symbolisiert. Xiaomi 15 trägt den Codenamen „Dada“, während Xiaomi 15Pro den Namen „Haotian“ (was „Haotian“ bedeutet) trägt. Der interne Codename des Xiaomi Mi 15S Pro lautet „dijun“, was auf Kaiser Jun anspielt, den Schöpfergott von „The Classic of Mountains and Seas“. Abdeckungen der Xiaomi 15Ultra-Serie
 Das iPhone 18 soll einen Samsung-Sensor verwenden
Jul 25, 2024 pm 10:42 PM
Das iPhone 18 soll einen Samsung-Sensor verwenden
Jul 25, 2024 pm 10:42 PM
Es wird berichtet, dass Apples kommende iPhone 18-Serie voraussichtlich Bildsensoren von Samsung verwenden wird. Diese Änderung soll Sonys Monopol in der Lieferkette von Apple brechen. 1. Berichten zufolge hat Samsung ein spezielles Team zusammengestellt, um die Anforderungen von Apple zu erfüllen. Samsung wird Apple ab 2026 einen 1/2,6-Zoll-Ultraweitwinkel-Bildsensor mit 48 Megapixeln zur Verfügung stellen, was darauf hindeutet, dass Apple nicht mehr vollständig von der Sensorversorgung von Sony abhängig ist. Apple hat fast tausend Lieferanten und seine Supply-Chain-Management-Strategie ist flexibel und veränderbar. Normalerweise weist Apple jeder Komponente mindestens zwei Lieferanten zu, um den Lieferantenwettbewerb zu fördern und bessere Preise zu erzielen. Die Einführung von Samsung als Sensorlieferant kann die Kostenstruktur von Apple optimieren und sich möglicherweise auf die Marktposition von Sony auswirken. Funktionen der Samsung-Bildsensortechnologie
 So bewerten Sie die Kosteneffizienz der kommerziellen Unterstützung für Java-Frameworks
Jun 05, 2024 pm 05:25 PM
So bewerten Sie die Kosteneffizienz der kommerziellen Unterstützung für Java-Frameworks
Jun 05, 2024 pm 05:25 PM
Die Bewertung des Kosten-/Leistungsverhältnisses des kommerziellen Supports für ein Java-Framework umfasst die folgenden Schritte: Bestimmen Sie das erforderliche Maß an Sicherheit und Service-Level-Agreement-Garantien (SLA). Die Erfahrung und das Fachwissen des Forschungsunterstützungsteams. Erwägen Sie zusätzliche Services wie Upgrades, Fehlerbehebung und Leistungsoptimierung. Wägen Sie die Kosten für die Geschäftsunterstützung gegen Risikominderung und Effizienzsteigerung ab.
 OPPO Find X7 ist ein Meisterwerk! Halten Sie jeden Moment mit Bildern fest
Aug 07, 2024 pm 07:19 PM
OPPO Find X7 ist ein Meisterwerk! Halten Sie jeden Moment mit Bildern fest
Aug 07, 2024 pm 07:19 PM
In dieser schnelllebigen Zeit kann OPPO Find X7 seine Bildleistung nutzen, um uns jeden schönen Moment im Leben genießen zu lassen. Egal, ob es sich um herrliche Berge, Flüsse, Seen oder Meere, herzliche Familientreffen oder Begegnungen und Überraschungen auf der Straße handelt, es kann Ihnen dabei helfen, diese in „beispielloser“ Bildqualität festzuhalten. Von außen sieht das Kamera-Deco-Design von Find It sehr erkennbar aus und wirkt hochwertig. Auch das Innere ist einzigartig, angefangen bei der grundlegenden Hardware-Ausstattung. FindX7 behält das Bisherige bei
 Wie ist die Lernkurve von PHP-Frameworks im Vergleich zu anderen Sprach-Frameworks?
Jun 06, 2024 pm 12:41 PM
Wie ist die Lernkurve von PHP-Frameworks im Vergleich zu anderen Sprach-Frameworks?
Jun 06, 2024 pm 12:41 PM
Die Lernkurve eines PHP-Frameworks hängt von Sprachkenntnissen, Framework-Komplexität, Dokumentationsqualität und Community-Unterstützung ab. Die Lernkurve von PHP-Frameworks ist im Vergleich zu Python-Frameworks höher und im Vergleich zu Ruby-Frameworks niedriger. Im Vergleich zu Java-Frameworks haben PHP-Frameworks eine moderate Lernkurve, aber eine kürzere Einstiegszeit.
 Die Designspezifikationen für Xiaomis 100-Yuan-Telefon Redmi 14C wurden bekannt gegeben und werden am 31. August veröffentlicht
Aug 23, 2024 pm 09:31 PM
Die Designspezifikationen für Xiaomis 100-Yuan-Telefon Redmi 14C wurden bekannt gegeben und werden am 31. August veröffentlicht
Aug 23, 2024 pm 09:31 PM
Xiaomis Marke Redmi bereitet sich darauf vor, ein weiteres preisgünstiges Telefon in sein Portfolio aufzunehmen – das Redmi 14C. Es wurde bestätigt, dass das Gerät am 31. August in Vietnam auf den Markt kommt. Allerdings wurden die Spezifikationen des Telefons vor der Markteinführung über einen vietnamesischen Einzelhändler bekannt gegeben. Redmi14CR Redmi bringt oft neue Designs in neue Serien und Redmi14C ist da keine Ausnahme. Das Telefon verfügt über ein großes kreisförmiges Kameramodul auf der Rückseite, das sich völlig vom Design des Vorgängers unterscheidet. Die blaue Farbversion verwendet sogar ein Farbverlaufsdesign, um es hochwertiger aussehen zu lassen. Tatsächlich handelt es sich beim Redmi14C jedoch um ein sparsames Mobiltelefon. Das Kameramodul besteht aus vier Ringen; einer beherbergt den 50-Megapixel-Hauptsensor und ein anderer kann die Kamera für Tiefeninformationen beherbergen.
