
 Technologie-Peripheriegeräte
KI
Trainieren Sie Ihren Roboterhund in Echtzeit mit Vision Pro! Das Open-Source-Projekt eines MIT-Doktoranden wird immer beliebter
Technologie-Peripheriegeräte
KI
Trainieren Sie Ihren Roboterhund in Echtzeit mit Vision Pro! Das Open-Source-Projekt eines MIT-Doktoranden wird immer beliebter
Trainieren Sie Ihren Roboterhund in Echtzeit mit Vision Pro! Das Open-Source-Projekt eines MIT-Doktoranden wird immer beliebter

Vision Pro hat ein weiteres heißes neues Gameplay, dieses Mal ist es mit verkörperter Intelligenz verbunden~
Einfach so nutzte der MIT-Typ die Handverfolgungsfunktion von Vision Pro, um erfolgreich eine Echtzeitsteuerung des Roboterhundes zu erreichen.
Es können nicht nur Aktionen wie das Öffnen einer Tür präzise durchgeführt werden:

, es gibt auch fast keine Verzögerung.
Sobald die Demo herauskam, lobten nicht nur Internetnutzer Goose Girl, sondern auch verschiedene verkörperte Intelligenzforscher waren begeistert.
Zum Beispiel dieser angehende Doktorand an der Tsinghua-Universität:
Manche sagen mutig voraus: So werden wir mit der nächsten Generation von Maschinen interagieren.

Wie man das Projekt umsetzt, hat der Autor Park Younghyo(Younghyo Park) Open Source auf GitHub. Relevante Apps können direkt im App Store von Vision Pro heruntergeladen werden.
Verwenden Sie Vision Pro, um den Roboterhund zu trainieren
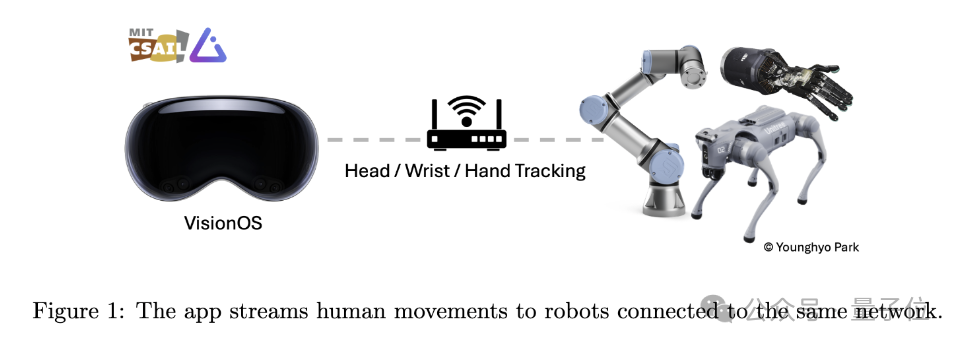
Schauen wir uns die vom Autor entwickelte App im Detail an – Tracking Steamer.
Wie der Name schon sagt, ist diese Anwendung darauf ausgelegt, mithilfe von Vision Pro menschliche Bewegungen zu verfolgen und diese Bewegungsdaten in Echtzeit an andere Robotergeräte über dasselbe WLAN zu übertragen.
Der Bewegungsverfolgungsteil basiert hauptsächlich auf der ARKit-Bibliothek von Apple.
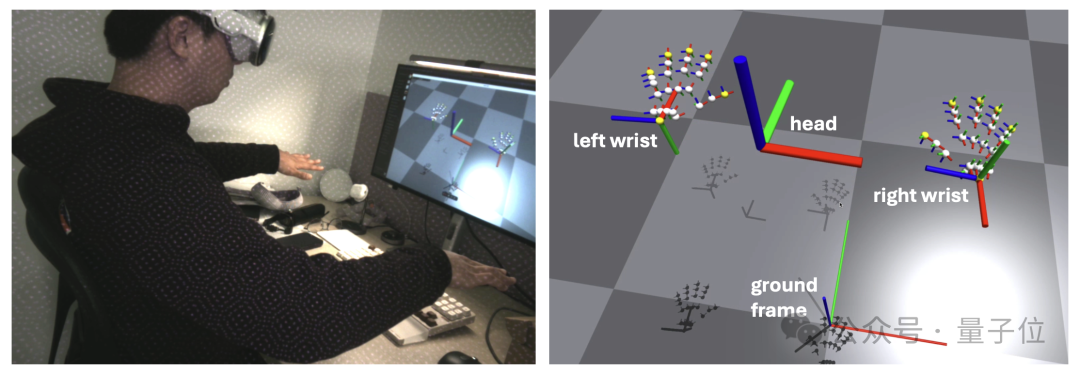
Das Head-Tracking ruft queryDeviceAnchor auf. Benutzer können den Kopfrahmen auf seine aktuelle Position zurücksetzen, indem sie die Digital Crown gedrückt halten.
Handgelenk- und Finger-Tracking werden über HandTrackingProvider implementiert. Es ist in der Lage, die Position und Ausrichtung des linken und rechten Handgelenks relativ zum Bodenrahmen sowie die Haltung der 25 Fingergelenke jeder Hand relativ zum Handgelenkrahmen zu verfolgen.
In Bezug auf die Netzwerkkommunikation verwendet diese App gRPC als Netzwerkkommunikationsprotokoll zum Streamen von Daten. Dadurch können Daten auf mehr Geräten abonniert werden, einschließlich Linux-, Mac- und Windows-Geräten.
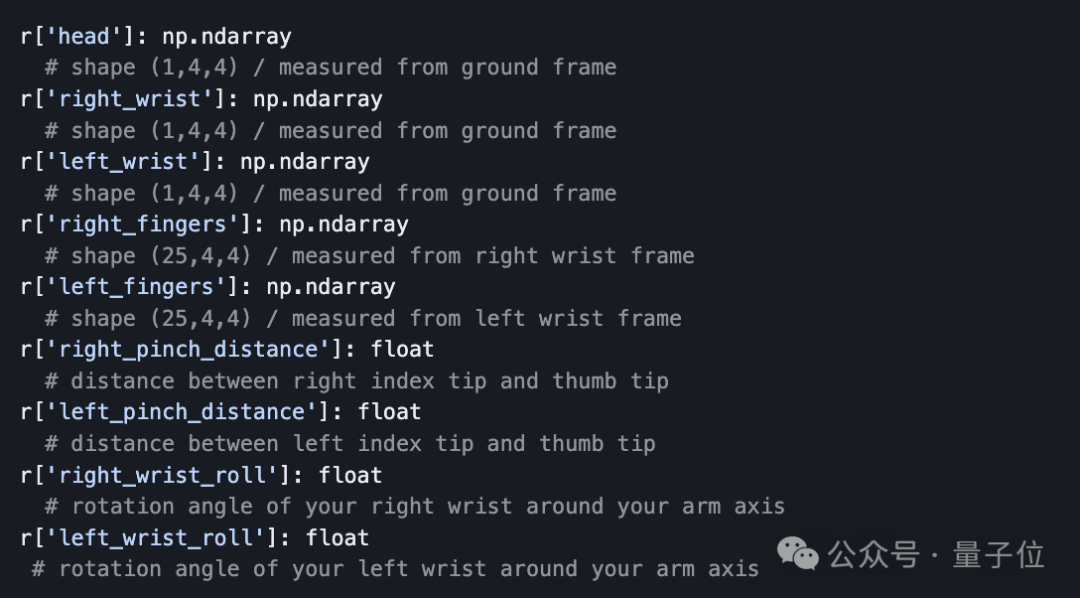
Um die Datenübertragung zu erleichtern, hat der Autor außerdem eine Python-API vorbereitet, die es Entwicklern ermöglicht, von Vision Pro gestreamte Tracking-Daten programmgesteuert zu abonnieren und zu empfangen.
Die von der API zurückgegebenen Daten liegen in Wörterbuchform vor, einschließlich der SE (3)-Haltungsinformationen von Kopf, Handgelenk und Fingern, also der dreidimensionalen Position und Ausrichtung. Entwickler können diese Daten zur weiteren Analyse und Steuerung des Roboters direkt in Python verarbeiten.
Wie viele Fachleute betont haben, sind Menschen unabhängig davon, ob die Bewegungen des Roboterhundes immer noch von Menschen gesteuert werden, im Vergleich zur „Kontrolle“ selbst in Kombination mit dem Nachahmungslernalgorithmus in der Lage Dieser Prozess ist wie ein Robotertrainer.
Vision Pro bietet eine intuitive und einfache Interaktionsmethode, indem es die Bewegungen des Benutzers verfolgt und es Laien ermöglicht, genaue Trainingsdaten für Roboter bereitzustellen.
Der Autor selbst schrieb in der Zeitung auch:
In naher Zukunft könnten Menschen Geräte wie Vision Pro wie Alltagsbrillen tragen. Stellen Sie sich vor, wie viele Daten wir aus diesem Prozess sammeln können!
Dies ist eine vielversprechende Datenquelle, aus der Roboter lernen können, wie Menschen mit der realen Welt interagieren.
Abschließend noch eine Erinnerung: Wenn Sie dieses Open-Source-Projekt ausprobieren möchten, müssen Sie zusätzlich zu Vision Pro auch Folgendes vorbereiten:
- Apple-Entwicklerkonto
- Vision Pro-Entwicklerzubehör (Entwicklergurt, Preis: 299 $)
- Mac-Computer mit installiertem
Projektlink:
https://github.com/Improbable-AI/VisionProTeleop?tab=readme-ov-file
Das obige ist der detaillierte Inhalt vonTrainieren Sie Ihren Roboterhund in Echtzeit mit Vision Pro! Das Open-Source-Projekt eines MIT-Doktoranden wird immer beliebter. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1378
1378
 52
52

 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Verzichten Sie auf die Encoder-Decoder-Architektur und verwenden Sie das Diffusionsmodell zur Kantenerkennung, das effektiver ist. Die National University of Defense Technology hat DiffusionEdge vorgeschlagen
Feb 07, 2024 pm 10:12 PM
Verzichten Sie auf die Encoder-Decoder-Architektur und verwenden Sie das Diffusionsmodell zur Kantenerkennung, das effektiver ist. Die National University of Defense Technology hat DiffusionEdge vorgeschlagen
Feb 07, 2024 pm 10:12 PM
Aktuelle Deep-Edge-Erkennungsnetzwerke verwenden normalerweise eine Encoder-Decoder-Architektur, die Up- und Down-Sampling-Module enthält, um mehrstufige Merkmale besser zu extrahieren. Diese Struktur schränkt jedoch die Ausgabe genauer und detaillierter Kantenerkennungsergebnisse des Netzwerks ein. Als Antwort auf dieses Problem bietet ein Papier zu AAAI2024 eine neue Lösung. Titel der Abschlussarbeit: DiffusionEdge:DiffusionProbabilisticModelforCrispEdgeDetection Autoren: Ye Yunfan (Nationale Universität für Verteidigungstechnologie), Xu Kai (Nationale Universität für Verteidigungstechnologie), Huang Yuxing (Nationale Universität für Verteidigungstechnologie), Yi Renjiao (Nationale Universität für Verteidigungstechnologie), Cai Zhiping (National University of Defense Technology) Link zum Papier: https://ar
 Tongyi Qianwen ist wieder Open Source, Qwen1.5 bietet sechs Volumenmodelle und seine Leistung übertrifft GPT3.5
Feb 07, 2024 pm 10:15 PM
Tongyi Qianwen ist wieder Open Source, Qwen1.5 bietet sechs Volumenmodelle und seine Leistung übertrifft GPT3.5
Feb 07, 2024 pm 10:15 PM
Pünktlich zum Frühlingsfest ist Version 1.5 des Tongyi Qianwen Large Model (Qwen) online. Heute Morgen erregten die Neuigkeiten über die neue Version die Aufmerksamkeit der KI-Community. Die neue Version des großen Modells umfasst sechs Modellgrößen: 0,5B, 1,8B, 4B, 7B, 14B und 72B. Unter ihnen übertrifft die Leistung der stärksten Version GPT3.5 und Mistral-Medium. Diese Version umfasst das Basismodell und das Chat-Modell und bietet Unterstützung für mehrere Sprachen. Das Tongyi Qianwen-Team von Alibaba gab an, dass die entsprechende Technologie auch auf der offiziellen Website von Tongyi Qianwen und der Tongyi Qianwen App eingeführt wurde. Darüber hinaus bietet die heutige Version von Qwen 1.5 auch die folgenden Highlights: Unterstützt eine Kontextlänge von 32 KB und öffnet den Prüfpunkt des Base+Chat-Modells.
 Große Modelle können ebenfalls in Scheiben geschnitten werden, und Microsoft SliceGPT erhöht die Recheneffizienz von LLAMA-2 erheblich
Jan 31, 2024 am 11:39 AM
Große Modelle können ebenfalls in Scheiben geschnitten werden, und Microsoft SliceGPT erhöht die Recheneffizienz von LLAMA-2 erheblich
Jan 31, 2024 am 11:39 AM
Große Sprachmodelle (LLMs) verfügen typischerweise über Milliarden von Parametern und werden auf Billionen von Token trainiert. Die Schulung und Bereitstellung solcher Modelle ist jedoch sehr teuer. Um den Rechenaufwand zu reduzieren, werden häufig verschiedene Modellkomprimierungstechniken eingesetzt. Diese Modellkomprimierungstechniken können im Allgemeinen in vier Kategorien unterteilt werden: Destillation, Tensorzerlegung (einschließlich Faktorisierung mit niedrigem Rang), Bereinigung und Quantisierung. Pruning-Methoden gibt es schon seit einiger Zeit, aber viele erfordern nach dem Pruning eine Feinabstimmung der Wiederherstellung (Recovery Fine-Tuning, RFT), um die Leistung aufrechtzuerhalten, was den gesamten Prozess kostspielig und schwierig zu skalieren macht. Forscher der ETH Zürich und von Microsoft haben eine Lösung für dieses Problem namens SliceGPT vorgeschlagen. Die Kernidee dieser Methode besteht darin, die Einbettung des Netzwerks durch das Löschen von Zeilen und Spalten in der Gewichtsmatrix zu reduzieren.
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 Aktualisierter Point Transformer: effizienter, schneller und leistungsfähiger!
Jan 17, 2024 am 08:27 AM
Aktualisierter Point Transformer: effizienter, schneller und leistungsfähiger!
Jan 17, 2024 am 08:27 AM
Originaltitel: PointTransformerV3: Simpler, Faster, Stronger Papier-Link: https://arxiv.org/pdf/2312.10035.pdf Code-Link: https://github.com/Pointcept/PointTransformerV3 Autor: HKUSHAILabMPIPKUMIT Papier-Idee: Dieser Artikel ist nicht zur Veröffentlichung in „Suche nach Innovation innerhalb des Aufmerksamkeitsmechanismus“ gedacht. Stattdessen liegt der Schwerpunkt darauf, die Macht der Skalierung zu nutzen, um bestehende Kompromisse zwischen Genauigkeit und Effizienz im Kontext der Punktwolkenverarbeitung zu überwinden. Lassen Sie sich von den jüngsten Fortschritten beim Lernen groß angelegter 3D-Darstellungen inspirieren.
 Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Was? Wird Zootopia durch heimische KI in die Realität umgesetzt? Zusammen mit dem Video wird ein neues groß angelegtes inländisches Videogenerationsmodell namens „Keling“ vorgestellt. Sora geht einen ähnlichen technischen Weg und kombiniert eine Reihe selbst entwickelter technologischer Innovationen, um Videos zu produzieren, die nicht nur große und vernünftige Bewegungen aufweisen, sondern auch die Eigenschaften der physischen Welt simulieren und über starke konzeptionelle Kombinationsfähigkeiten und Vorstellungskraft verfügen. Den Daten zufolge unterstützt Keling die Erstellung ultralanger Videos von bis zu 2 Minuten mit 30 Bildern pro Sekunde, mit Auflösungen von bis zu 1080p und unterstützt mehrere Seitenverhältnisse. Ein weiterer wichtiger Punkt ist, dass es sich bei Keling nicht um eine vom Labor veröffentlichte Demo oder Video-Ergebnisdemonstration handelt, sondern um eine Anwendung auf Produktebene, die von Kuaishou, einem führenden Anbieter im Bereich Kurzvideos, gestartet wurde. Darüber hinaus liegt das Hauptaugenmerk darauf, pragmatisch zu sein, keine Blankoschecks auszustellen und sofort nach der Veröffentlichung online zu gehen. Das große Modell von Ke Ling wurde bereits in Kuaiying veröffentlicht.
 Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Ich weine zu Tode. Die Daten im Internet reichen überhaupt nicht aus. Das Trainingsmodell sieht aus wie „Die Tribute von Panem“, und KI-Forscher auf der ganzen Welt machen sich Gedanken darüber, wie sie diese datenhungrigen Esser ernähren sollen. Dieses Problem tritt insbesondere bei multimodalen Aufgaben auf. Zu einer Zeit, als sie ratlos waren, nutzte ein Start-up-Team der Abteilung der Renmin-Universität von China sein eigenes neues Modell, um als erstes in China einen „modellgenerierten Datenfeed selbst“ in die Realität umzusetzen. Darüber hinaus handelt es sich um einen zweigleisigen Ansatz auf der Verständnisseite und der Generierungsseite. Beide Seiten können hochwertige, multimodale neue Daten generieren und Datenrückmeldungen an das Modell selbst liefern. Was ist ein Modell? Awaker 1.0, ein großes multimodales Modell, das gerade im Zhongguancun-Forum erschienen ist. Wer ist das Team? Sophon-Motor. Gegründet von Gao Yizhao, einem Doktoranden an der Hillhouse School of Artificial Intelligence der Renmin University.
