
 Technologie-Peripheriegeräte
KI
CVPR 2024 |. Zero-Sample-6D-Objekthaltungsschätzungs-Framework SAM-6D, ein Schritt näher an der verkörperten Intelligenz
Technologie-Peripheriegeräte
KI
CVPR 2024 |. Zero-Sample-6D-Objekthaltungsschätzungs-Framework SAM-6D, ein Schritt näher an der verkörperten Intelligenz
CVPR 2024 |. Zero-Sample-6D-Objekthaltungsschätzungs-Framework SAM-6D, ein Schritt näher an der verkörperten Intelligenz

Die Schätzung der Objekthaltung spielt in vielen praktischen Anwendungen eine Schlüsselrolle, beispielsweise in Bereichen wie verkörperte Intelligenz, Roboterbetrieb und Augmented Reality.
In diesem Bereich ist die Aufgabe, die zuerst Aufmerksamkeit erregte, die 6D-Posenschätzung auf Instanzebene, die annotierte Daten über das Zielobjekt für das Modelltraining erfordert, wodurch das tiefe Modell objektspezifisch wird und nicht auf neue Objekte übertragen werden kann. Vorgesetzter. Später verlagerte sich der Forschungsschwerpunkt nach und nach auf die „6D-Posenschätzung auf Kategorieebene“, die zur Verarbeitung unsichtbarer Objekte verwendet wird, aber erfordert, dass das Objekt zu einer bekannten Kategorie von Interesse gehört. Und Zero-Shot 6D-Poseschätzung ist eine allgemeinere Aufgabenstellung, bei der ein CAD-Modell eines beliebigen Objekts gegeben wird und die darauf abzielt, das Zielobjekt in der Szene zu erkennen und seine 6D-Pose abzuschätzen. Trotz ihrer Bedeutung steht diese Zero-Shot-Aufgabeneinstellung vor erheblichen Herausforderungen sowohl bei der Objekterkennung als auch bei der Posenschätzung.
 Abbildung 1. 6D-Objektposition ohne Stichprobe ationsaufgabe
Abbildung 1. 6D-Objektposition ohne Stichprobe ationsaufgabe
In letzter Zeit hat das Segmentierungs-All-Model-SAM [1] viel Aufmerksamkeit auf sich gezogen und seine hervorragende Null-Probe-Segmentierungsfähigkeit ist ein Blickfang. SAM erreicht eine hochpräzise Segmentierung durch verschiedene Hinweise wie Pixel, Begrenzungsrahmen, Text und Masken usw., was auch eine zuverlässige Unterstützung für die Null-Probe-6D-Objekthaltungsschätzungsaufgabe bietet und sein vielversprechendes Potenzial demonstriert. Daher wurde von Forschern von Cross-Dimensional Intelligence, der Chinese University of Hong Kong (Shenzhen) und der South China University of Technology ein neues Zero-Sample-Framework zur 6D-Objekthaltungsschätzung SAM-6D vorgeschlagen. Diese Forschung wurde vom CVPR 2024 anerkannt.
 Papier-Link: https://arxiv.org/pdf/2311.15707.pdf
Papier-Link: https://arxiv.org/pdf/2311.15707.pdf
Code-Link: https://github.com/JiehongLin/SAM-6D
-
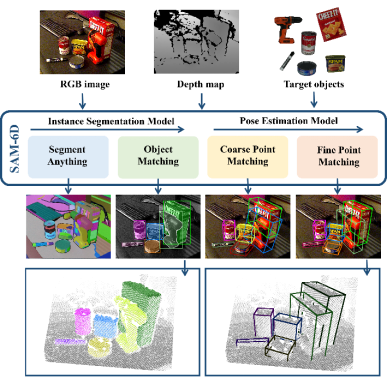
SAM-6D Die Posenschätzung von 6D-Objekten ohne Stichprobe wird durch zwei Schritte erreicht, einschließlich Instanzsegmentierung und Posenschätzung. Dementsprechend nutzt SAM-6D bei jedem Zielobjekt zwei dedizierte Subnetzwerke, nämlich
Instance Segmentation Model (ISM) und Pose Estimation Model (PEM) , um das Ziel aus RGB-D-Szenenbildern zu erreichen, wobei ISM SAM verwendet Als hervorragender Ausgangspunkt, kombiniert mit sorgfältig entwickelten Objekt-Matching-Scores, um eine Instanzsegmentierung beliebiger Objekte zu erreichen, löst PEM das Objekt-Posen-Problem durch einen zweistufigen Punktsatz-Matching-Prozess von lokal zu lokal. Eine Übersicht über den SAM-6D ist in Abbildung 2 dargestellt.
 andere AM-6D ist ein innovatives Zero-Sample-6D-Posenschätzungs-Framework, das anhand des CAD-Modells eines beliebigen Objekts eine Instanzsegmentierung und Posenschätzung von Zielobjekten aus RGB-D-Bildern erreicht und eine hervorragende Leistung erbringt zu den sieben Kerndatensätzen von BOP [2].
andere AM-6D ist ein innovatives Zero-Sample-6D-Posenschätzungs-Framework, das anhand des CAD-Modells eines beliebigen Objekts eine Instanzsegmentierung und Posenschätzung von Zielobjekten aus RGB-D-Bildern erreicht und eine hervorragende Leistung erbringt zu den sieben Kerndatensätzen von BOP [2].
SAM-6D nutzt die Zero-Shot-Segmentierungsfähigkeit des Segment Everything-Modells, um alle möglichen Kandidaten zu generieren, und entwirft einen neuartigen Objekt-Matching-Score, um Kandidaten zu identifizieren, die Zielobjekten entsprechen.
SAM-6D behandelt die Posenschätzung als ein lokales Punktmengen-Matching-Problem, übernimmt ein einfaches, aber effektives Hintergrund-Token-Design und schlägt zunächst ein zweistufiges Punktmengen-Matching-Modell für beliebige Objekte vor. Die erste Stufe wird implementiert Grober Punktsatzabgleich, um die anfängliche Objektpose zu erhalten, und die zweite Stufe verwendet einen neuartigen Punktsatztransformator von dünner bis dichter Dichte, um einen feinen Punktsatzabgleich durchzuführen, um die Pose weiter zu optimieren.
- Instance Segmentation Model (ISM)
SAM-6D verwendet das Instance Segmentation Model (ISM), um Masken beliebiger Objekte zu erkennen und zu segmentieren.
Angesichts einer überfüllten Szene, die durch RGB-Bilder dargestellt wird, nutzt ISM die Zero-Shot-Übertragungsfunktion des Segmentation Everything Model (SAM), um alle möglichen Kandidaten zu generieren. Für jedes Kandidatenobjekt berechnet ISM einen Objektübereinstimmungswert, um abzuschätzen, wie gut es in Bezug auf Semantik, Aussehen und Geometrie mit dem Zielobjekt übereinstimmt. Schließlich können durch einfaches Festlegen eines Übereinstimmungsschwellenwerts Instanzen identifiziert werden, die mit dem Zielobjekt übereinstimmen. Der Objekt-Matching-Score wird durch die gewichtete Summe von drei Matching-Termen berechnet:
– Für das Zielobjekt rendert ISM Objektvorlagen aus mehreren Perspektiven und verwendet DINOv2 [3] für das Vortraining des ViT-Modells Extrahiert semantische Merkmale von Kandidatenobjekten und Objektvorlagen und berechnet Korrelationswerte zwischen ihnen. Die semantische Übereinstimmungsbewertung wird durch Mitteln der höchsten K-Bewertungen erhalten, und die Objektvorlage, die der höchsten Korrelationsbewertung entspricht, wird als die am besten übereinstimmende Vorlage angesehen. Aussehensübereinstimmung – Für die beste Übereinstimmungsvorlage wird das ViT-Modell verwendet, um Bildblockmerkmale zu extrahieren und die Korrelation zwischen ihnen und den Blockmerkmalen des Kandidatenobjekts zu berechnen, um den Aussehensübereinstimmungswert zu erhalten, der zur Unterscheidung semantisch ähnlicher Elemente verwendet wird aber äußerlich passende Gegenstände. Geometrische Übereinstimmungen – Unter Berücksichtigung von Faktoren wie den Unterschieden in Form und Größe verschiedener Objekte hat ISM auch einen geometrischen Übereinstimmungswert entwickelt. Der Durchschnitt der Drehung entsprechend der am besten passenden Vorlage und der Punktwolke des Kandidatenobjekts kann eine grobe Objekthaltung ergeben, und der Begrenzungsrahmen kann durch starre Transformation und Projektion des Objekt-CAD-Modells unter Verwendung dieser Haltung erhalten werden. Durch Berechnen des Schnittmengen-über-Union-Verhältnisses (IoU) zwischen dem Begrenzungsrahmen und dem Kandidaten-Begrenzungsrahmen kann der geometrische Übereinstimmungswert ermittelt werden. Pose Estimation Model (PEM) Für jedes Kandidatenobjekt, das mit einem Zielobjekt übereinstimmt, verwendet SAM-6D ein Pose Estimation Model (PEM), um seine 6D-Pose relativ zum CAD-Modell des Objekts vorherzusagen. Bezeichnen Sie die Abtastpunktsätze segmentierter Kandidatenobjekte und Objekt-CAD-Modelle als Um das Problem der Zuweisung nicht überlappender Punkte in zwei Punktmengen zu lösen, stattet ISM sie mit Hintergrund-Tokens aus, die als Dann stellen die Verteilungsmatrix Sobald Unter Verwendung der oben genannten Strategie basierend auf dem Hintergrundtoken werden in PEM zwei Phasen des Punktsatzabgleichs entworfen. Die Modellstruktur ist in Abbildung 3 dargestellt, die drei Module umfasst: Merkmalsextraktion, grober Punktsatzabgleich und feiner Punktsatzabgleich. Experimentelle Ergebnisse Tabellen 2. Verschiedene Methoden zur Einstellung verschiedener Methoden zu den sieben Kerndatensätzen zu BOP Vergleich der Ergebnisse Weitere Implementierungsdetails von SAM-6D finden Sie im Originalpapier. Referenzen: [1] Alexander Kirillov et. al., „Segment everything.“ [3] Maxime Oquab et. al., „Dinov2: Learning Robuste visuelle Funktionen ohne Aufsicht . al., „Transformer sind rnns: Schnelle autoregressive Transformer mit linearer Aufmerksamkeit.“ bzw.
bzw.  , wobei N_m und N_o gleichzeitig die Anzahl ihrer Punkte darstellen und die Eigenschaften dieser beiden Punktsätze als
, wobei N_m und N_o gleichzeitig die Anzahl ihrer Punkte darstellen und die Eigenschaften dieser beiden Punktsätze als  und
und  darstellen. C steht für die Anzahl der Kanäle der Funktion. Das Ziel von PEM besteht darin, eine Zuordnungsmatrix zu erhalten, die die örtliche Korrespondenz von P_m zu P_o darstellt. Aufgrund der Okklusion stimmt P_o nur teilweise mit P_m überein, und aufgrund von Segmentierungsungenauigkeiten und Sensorrauschen stimmt P_m nur teilweise überein. Teilweise UND-Übereinstimmungen P_o.
darstellen. C steht für die Anzahl der Kanäle der Funktion. Das Ziel von PEM besteht darin, eine Zuordnungsmatrix zu erhalten, die die örtliche Korrespondenz von P_m zu P_o darstellt. Aufgrund der Okklusion stimmt P_o nur teilweise mit P_m überein, und aufgrund von Segmentierungsungenauigkeiten und Sensorrauschen stimmt P_m nur teilweise überein. Teilweise UND-Übereinstimmungen P_o.  und
und  bezeichnet werden und auf der Grundlage der Merkmalsähnlichkeit effektiv eine lokale Korrespondenz herstellen können. Konkret kann die Aufmerksamkeitsmatrix zunächst wie folgt berechnet werden:
bezeichnet werden und auf der Grundlage der Merkmalsähnlichkeit effektiv eine lokale Korrespondenz herstellen können. Konkret kann die Aufmerksamkeitsmatrix zunächst wie folgt berechnet werden: 

 und
und  die Softmax-Operation entlang der Zeilen bzw. Spalten dar und
die Softmax-Operation entlang der Zeilen bzw. Spalten dar und  stellt eine Konstante dar. Der Wert jeder Zeile in
stellt eine Konstante dar. Der Wert jeder Zeile in  (mit Ausnahme der ersten Zeile) stellt die Übereinstimmungswahrscheinlichkeit jedes Punktes P_m in der Punktmenge P_m mit dem Hintergrund und dem Mittelpunkt von P_o dar. Durch Lokalisieren des Index der maximalen Punktzahl wird der Punkt, der P_m entspricht (einschließlich). der Hintergrund) finden Sie ).
(mit Ausnahme der ersten Zeile) stellt die Übereinstimmungswahrscheinlichkeit jedes Punktes P_m in der Punktmenge P_m mit dem Hintergrund und dem Mittelpunkt von P_o dar. Durch Lokalisieren des Index der maximalen Punktzahl wird der Punkt, der P_m entspricht (einschließlich). der Hintergrund) finden Sie ).  berechnet ist, können alle übereinstimmenden Punktpaare {(P_m,P_o)} und ihre Übereinstimmungswerte gesammelt werden, und schließlich wird die gewichtete SVD zur Berechnung der Objektpose verwendet.
berechnet ist, können alle übereinstimmenden Punktpaare {(P_m,P_o)} und ihre Übereinstimmungswerte gesammelt werden, und schließlich wird die gewichtete SVD zur Berechnung der Objektpose verwendet. 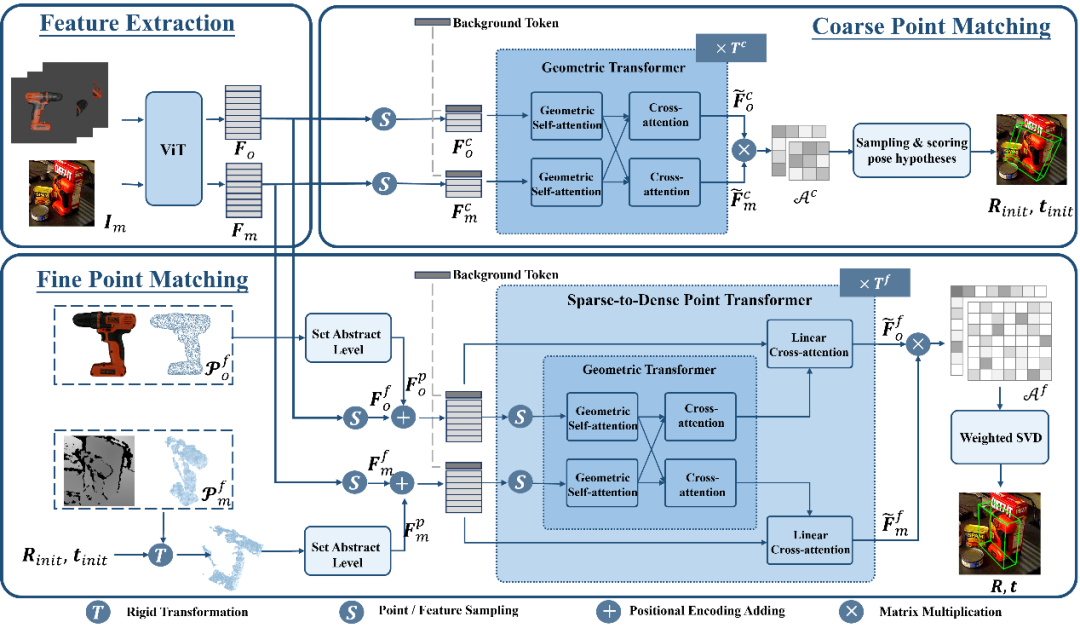
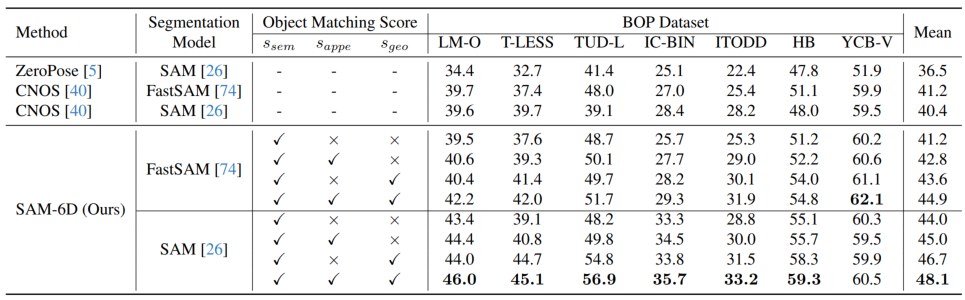
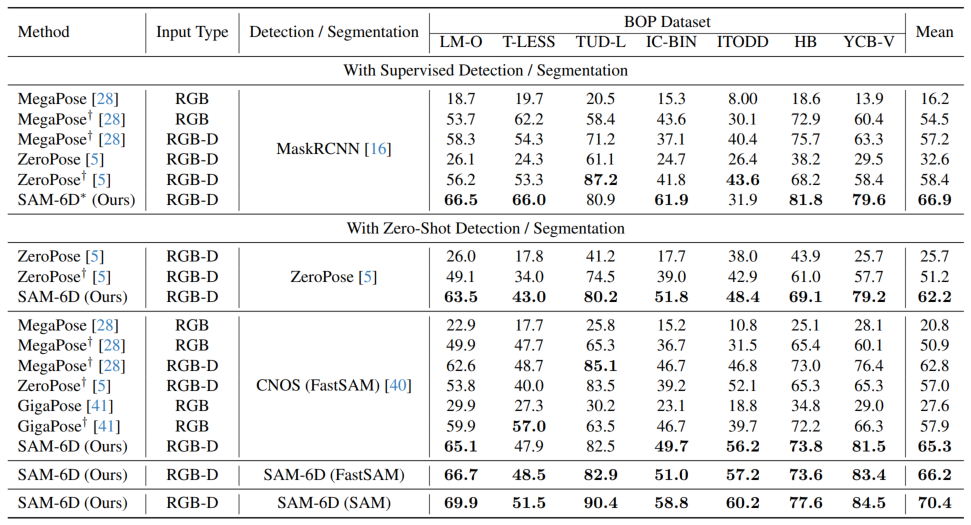 Abbildung 4 zeigt die visuellen Ergebnisse der Erkennungssegmentierung und der 6D-Lageschätzung von SAM-6D anhand von sieben BOP-Datensätzen, wobei (a) und (b) die getesteten RGB-Bilder bzw. Tiefenkarten sind und (c) ein gegebenes Ziel ist Objekt, während (d) und (e) die Visualisierungsergebnisse der Erkennungssegmentierung bzw. der 6D-Pose sind. -Abbildung 4. Die visuellen Ergebnisse der sieben Kerndatensätze von SAM-6D auf dem BOP.
Abbildung 4 zeigt die visuellen Ergebnisse der Erkennungssegmentierung und der 6D-Lageschätzung von SAM-6D anhand von sieben BOP-Datensätzen, wobei (a) und (b) die getesteten RGB-Bilder bzw. Tiefenkarten sind und (c) ein gegebenes Ziel ist Objekt, während (d) und (e) die Visualisierungsergebnisse der Erkennungssegmentierung bzw. der 6D-Pose sind. -Abbildung 4. Die visuellen Ergebnisse der sieben Kerndatensätze von SAM-6D auf dem BOP. 
Das obige ist der detaillierte Inhalt vonCVPR 2024 |. Zero-Sample-6D-Objekthaltungsschätzungs-Framework SAM-6D, ein Schritt näher an der verkörperten Intelligenz. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1375
1375
 52
52

 Der Autor von ControlNet hat einen weiteren Hit! Der gesamte Prozess der Generierung eines Gemäldes aus einem Bild, der in zwei Tagen 1,4.000 Sterne verdient
Jul 17, 2024 am 01:56 AM
Der Autor von ControlNet hat einen weiteren Hit! Der gesamte Prozess der Generierung eines Gemäldes aus einem Bild, der in zwei Tagen 1,4.000 Sterne verdient
Jul 17, 2024 am 01:56 AM
Es ist ebenfalls ein Tusheng-Video, aber PaintsUndo ist einen anderen Weg gegangen. ControlNet-Autor LvminZhang begann wieder zu leben! Dieses Mal ziele ich auf den Bereich der Malerei. Das neue Projekt PaintsUndo hat nicht lange nach seinem Start 1,4.000 Sterne erhalten (die immer noch wahnsinnig steigen). Projektadresse: https://github.com/lllyasviel/Paints-UNDO Bei diesem Projekt gibt der Benutzer ein statisches Bild ein, und PaintsUndo kann Ihnen dabei helfen, automatisch ein Video des gesamten Malprozesses zu erstellen, vom Linienentwurf bis zum fertigen Produkt . Während des Zeichenvorgangs sind die Linienänderungen erstaunlich. Das Endergebnis des Videos ist dem Originalbild sehr ähnlich: Schauen wir uns eine vollständige Zeichnung an.
 Von RLHF über DPO bis TDPO sind große Modellausrichtungsalgorithmen bereits auf „Token-Ebene'
Jun 24, 2024 pm 03:04 PM
Von RLHF über DPO bis TDPO sind große Modellausrichtungsalgorithmen bereits auf „Token-Ebene'
Jun 24, 2024 pm 03:04 PM
Die AIxiv-Kolumne ist eine Kolumne, in der diese Website akademische und technische Inhalte veröffentlicht. In den letzten Jahren sind in der AIxiv-Kolumne dieser Website mehr als 2.000 Berichte eingegangen, die Spitzenlabore großer Universitäten und Unternehmen auf der ganzen Welt abdecken und so den akademischen Austausch und die Verbreitung wirksam fördern. Wenn Sie hervorragende Arbeiten haben, die Sie teilen möchten, können Sie gerne einen Beitrag leisten oder uns für die Berichterstattung kontaktieren. Einreichungs-E-Mail: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com Im Entwicklungsprozess der künstlichen Intelligenz war die Steuerung und Führung großer Sprachmodelle (LLM) schon immer eine der zentralen Herausforderungen, um sicherzustellen, dass diese Modelle beides sind kraftvoll und sicher dienen der menschlichen Gesellschaft. Frühe Bemühungen konzentrierten sich auf Methoden des verstärkenden Lernens durch menschliches Feedback (RL
 Die agentenlose Lösung von UIUC steht ganz oben auf der Liste der Open-Source-KI-Softwareentwickler und löst problemlos echte Programmierprobleme im SWE-Bench
Jul 17, 2024 pm 10:02 PM
Die agentenlose Lösung von UIUC steht ganz oben auf der Liste der Open-Source-KI-Softwareentwickler und löst problemlos echte Programmierprobleme im SWE-Bench
Jul 17, 2024 pm 10:02 PM
Die AIxiv-Kolumne ist eine Kolumne, in der diese Website akademische und technische Inhalte veröffentlicht. In den letzten Jahren sind in der AIxiv-Kolumne dieser Website mehr als 2.000 Berichte eingegangen, die Spitzenlabore großer Universitäten und Unternehmen auf der ganzen Welt abdecken und so den akademischen Austausch und die Verbreitung wirksam fördern. Wenn Sie hervorragende Arbeiten haben, die Sie teilen möchten, können Sie gerne einen Beitrag leisten oder uns für die Berichterstattung kontaktieren. Einreichungs-E-Mail: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com Die Autoren dieses Artikels stammen alle aus dem Team von Lehrer Zhang Lingming an der University of Illinois in Urbana-Champaign, darunter: Steven Code Repair; Doktorand im vierten Jahr, Forscher
 Posthume Arbeit des OpenAI Super Alignment Teams: Zwei große Modelle spielen ein Spiel und die Ausgabe wird verständlicher
Jul 19, 2024 am 01:29 AM
Posthume Arbeit des OpenAI Super Alignment Teams: Zwei große Modelle spielen ein Spiel und die Ausgabe wird verständlicher
Jul 19, 2024 am 01:29 AM
Wenn die Antwort des KI-Modells überhaupt unverständlich ist, würden Sie es wagen, sie zu verwenden? Da maschinelle Lernsysteme in immer wichtigeren Bereichen eingesetzt werden, wird es immer wichtiger zu zeigen, warum wir ihren Ergebnissen vertrauen können und wann wir ihnen nicht vertrauen sollten. Eine Möglichkeit, Vertrauen in die Ausgabe eines komplexen Systems zu gewinnen, besteht darin, vom System zu verlangen, dass es eine Interpretation seiner Ausgabe erstellt, die für einen Menschen oder ein anderes vertrauenswürdiges System lesbar ist, d. h. so vollständig verständlich, dass mögliche Fehler erkannt werden können gefunden. Um beispielsweise Vertrauen in das Justizsystem aufzubauen, verlangen wir von den Gerichten, dass sie klare und lesbare schriftliche Stellungnahmen abgeben, die ihre Entscheidungen erläutern und stützen. Für große Sprachmodelle können wir auch einen ähnlichen Ansatz verfolgen. Stellen Sie bei diesem Ansatz jedoch sicher, dass das Sprachmodell generiert wird
 Axiomatisches Training ermöglicht es LLM, kausales Denken zu erlernen: Das 67-Millionen-Parameter-Modell ist vergleichbar mit der Billionen-Parameter-Ebene GPT-4
Jul 17, 2024 am 10:14 AM
Axiomatisches Training ermöglicht es LLM, kausales Denken zu erlernen: Das 67-Millionen-Parameter-Modell ist vergleichbar mit der Billionen-Parameter-Ebene GPT-4
Jul 17, 2024 am 10:14 AM
Zeigen Sie LLM die Kausalkette und es lernt die Axiome. KI hilft Mathematikern und Wissenschaftlern bereits bei der Forschung. Beispielsweise hat der berühmte Mathematiker Terence Tao wiederholt seine Forschungs- und Forschungserfahrungen mit Hilfe von KI-Tools wie GPT geteilt. Damit KI in diesen Bereichen konkurrenzfähig sein kann, sind starke und zuverlässige Fähigkeiten zum kausalen Denken unerlässlich. Die in diesem Artikel vorgestellte Forschung ergab, dass ein Transformer-Modell, das auf die Demonstration des kausalen Transitivitätsaxioms für kleine Graphen trainiert wurde, auf das Transitivitätsaxiom für große Graphen verallgemeinern kann. Mit anderen Worten: Wenn der Transformer lernt, einfache kausale Überlegungen anzustellen, kann er für komplexere kausale Überlegungen verwendet werden. Der vom Team vorgeschlagene axiomatische Trainingsrahmen ist ein neues Paradigma zum Erlernen des kausalen Denkens auf der Grundlage passiver Daten, nur mit Demonstrationen
 arXiv-Artikel können als „Barrage' gepostet werden, die Diskussionsplattform von Stanford alphaXiv ist online, LeCun gefällt es
Aug 01, 2024 pm 05:18 PM
arXiv-Artikel können als „Barrage' gepostet werden, die Diskussionsplattform von Stanford alphaXiv ist online, LeCun gefällt es
Aug 01, 2024 pm 05:18 PM
Prost! Wie ist es, wenn es bei einer Papierdiskussion auf Worte ankommt? Kürzlich haben Studenten der Stanford University alphaXiv erstellt, ein offenes Diskussionsforum für arXiv-Artikel, das es ermöglicht, Fragen und Kommentare direkt zu jedem arXiv-Artikel zu posten. Website-Link: https://alphaxiv.org/ Tatsächlich ist es nicht erforderlich, diese Website speziell zu besuchen. Ändern Sie einfach arXiv in einer beliebigen URL in alphaXiv, um den entsprechenden Artikel direkt im alphaXiv-Forum zu öffnen: Sie können die Absätze darin genau lokalisieren das Papier, Satz: Im Diskussionsbereich auf der rechten Seite können Benutzer Fragen stellen, um dem Autor Fragen zu den Ideen und Details des Papiers zu stellen. Sie können beispielsweise auch den Inhalt des Papiers kommentieren, wie zum Beispiel: „Gegeben an.“
 Ein bedeutender Durchbruch in der Riemann-Hypothese! Tao Zhexuan empfiehlt dringend neue Arbeiten vom MIT und Oxford, und der 37-jährige Fields-Medaillengewinner nahm daran teil
Aug 05, 2024 pm 03:32 PM
Ein bedeutender Durchbruch in der Riemann-Hypothese! Tao Zhexuan empfiehlt dringend neue Arbeiten vom MIT und Oxford, und der 37-jährige Fields-Medaillengewinner nahm daran teil
Aug 05, 2024 pm 03:32 PM
Kürzlich gelang der Riemann-Hypothese, die als eines der sieben großen Probleme des Jahrtausends bekannt ist, ein neuer Durchbruch. Die Riemann-Hypothese ist ein sehr wichtiges ungelöstes Problem in der Mathematik, das sich auf die genauen Eigenschaften der Verteilung von Primzahlen bezieht (Primzahlen sind Zahlen, die nur durch 1 und sich selbst teilbar sind, und sie spielen eine grundlegende Rolle in der Zahlentheorie). In der heutigen mathematischen Literatur gibt es mehr als tausend mathematische Thesen, die auf der Aufstellung der Riemann-Hypothese (oder ihrer verallgemeinerten Form) basieren. Mit anderen Worten: Sobald die Riemann-Hypothese und ihre verallgemeinerte Form bewiesen sind, werden diese mehr als tausend Sätze als Theoreme etabliert, die einen tiefgreifenden Einfluss auf das Gebiet der Mathematik haben werden, und wenn sich die Riemann-Hypothese als falsch erweist, dann unter anderem Auch diese Sätze werden teilweise ihre Gültigkeit verlieren. Neuer Durchbruch kommt von MIT-Mathematikprofessor Larry Guth und der Universität Oxford
 Unbegrenzte Videogenerierung, Planung und Entscheidungsfindung, erzwungene Verbreitung der nächsten Token-Vorhersage und vollständige Sequenzverbreitung
Jul 23, 2024 pm 02:05 PM
Unbegrenzte Videogenerierung, Planung und Entscheidungsfindung, erzwungene Verbreitung der nächsten Token-Vorhersage und vollständige Sequenzverbreitung
Jul 23, 2024 pm 02:05 PM
Derzeit sind autoregressive groß angelegte Sprachmodelle, die das nächste Token-Vorhersageparadigma verwenden, auf der ganzen Welt populär geworden. Gleichzeitig haben uns zahlreiche synthetische Bilder und Videos im Internet bereits die Leistungsfähigkeit von Diffusionsmodellen gezeigt. Kürzlich hat ein Forschungsteam am MITCSAIL (darunter Chen Boyuan, ein Doktorand am MIT) erfolgreich die leistungsstarken Fähigkeiten des Vollsequenz-Diffusionsmodells und des nächsten Token-Modells integriert und ein Trainings- und Sampling-Paradigma vorgeschlagen: Diffusion Forcing (DF). ). Papiertitel: DiffusionForcing:Next-tokenPredictionMeetsFull-SequenceDiffusion Papieradresse: https:/
