
 Technologie-Peripheriegeräte
KI
Tencent Robot Research ist das Thema! Es kann Programmierern helfen, Monitore zu installieren und wie echte Menschen zusammenzuarbeiten
Technologie-Peripheriegeräte
KI
Tencent Robot Research ist das Thema! Es kann Programmierern helfen, Monitore zu installieren und wie echte Menschen zusammenzuarbeiten
Tencent Robot Research ist das Thema! Es kann Programmierern helfen, Monitore zu installieren und wie echte Menschen zusammenzuarbeiten

Neuer Durchbruch bei Haushaltsrobotern:
Zwei unabhängige Roboterarme können bereits reibungslos zusammenarbeiten!
Wenn Sie es nicht glauben, schauen Sie sich das an.Drehen Sie den Flaschenverschluss mit beiden Händen.:
Nehmen Sie nach dem Drehen den Becher und gießen Sie Wasser ein eine echte Person. Jetzt könnt ihr auch selbst Hand anlegen und dem Programmierer beim Einbau des Displays
helfen: 
Sogar die große Kiste vom „Kollegen“ übernommen:

Das kann Man kann sagen, dass alle Objekte mit verschiedenen geometrischen und physikalischen Eigenschaften stabil gehalten werden können. (Was kann ich als nächstes noch tun, ich traue mich nicht darüber nachzudenken)
Dies ist die neueste Errungenschaft von
„IEEE Transactions on Robotics“ veröffentlicht.
... „Unter 360°-Kippbetrieb“ demonstriert seine völlig autonome „Arme zur Vermeidung von Selbstkollisionen“. Wenn es gelegentlich auf ungezogene Menschen trifft, kann es es leicht bekommen, vollständige Absichtserkennung und dynamische Interaktion
:
Die spezifischen technischen Details werden enthüllt~
 Die universelle Verwirklichung des humanoiden Doppelarmsystems
Die universelle Verwirklichung des humanoiden Doppelarmsystems
Universelle humanoide Roboter sind in den letzten Jahren zweifellos ein Forschungsschwerpunkt an der Schnittstelle von Robotern und KI.
Unter diesen trägt das humanoide Doppelarmsystem direkt die Ausführungsfähigkeiten dieser Art von Roboterbetriebsaufgaben.
Die Fähigkeit, jedes Objekt mit verschiedenen geometrischen und physikalischen Eigenschaften willkürlich zu greifen und zu manipulieren, ist die technische Verkörperung der Verallgemeinerung dieses Systemtyps. 
Und die Lösungen sind meist stark auf die konkret bedienten Objekte oder Aufgaben bezogen, was eine Übertragung und Verallgemeinerung erschwert. Tencent Robotics
Zunächst einmal, wie man anhand der visuellen Wahrnehmung ein optimales Erfassen unbekannter Objekte mit zwei Armen erreicht.
Zweitens , wie man die Systemsicherheit von Doppelarmrobotern mit stark überlappenden Arbeitsräumen bei dynamischer Zusammenarbeit gewährleistet.
, wie man die Systemsicherheit von Doppelarmrobotern mit stark überlappenden Arbeitsräumen bei dynamischer Zusammenarbeit gewährleistet.
, wie man umfangreiche menschliche Fähigkeiten mit nur begrenzten Tracking-Schnittstellentypen auf Robotersysteme übertragen kann.
Hier ermöglicht die probabilistische Modellierung von Tencent Robotics ein optimales kollaboratives Erfassen unmodellierter Objekte.
2. Der optimierungsbasierte Multifunktionale Steuerungs-Subframe übernimmt ein hierarchisches Multiprioritäts-Optimierungsframework und bettet leichte Abstandsersatzfunktionen ein, die auf der Grundlage von Lern- und Geschwindigkeits-Tracking-Steuerungstechnologie auf Riemannschen Mannigfaltigkeiten generiert werden.
Gleichzeitig wird eine hochpräzise Selbstkollisionsvermeidung beider Arme und eine äußerst realistische Doppelarm-Betriebsellipsoidverfolgung erreicht, wodurch die Eigensicherheit des Doppelarmsystems gewährleistet und die Schnittstelle zur Betriebsellipsoidverfolgung geöffnet wird.
Darüber hinaus löste diese Forschung erstmals systematisch das kooperative optimale Greifen unbekannter Objekte mit zwei Armen auf der Grundlage der visuellen Wahrnehmung, wodurch die Eigensicherheit eines zweiarmigen Roboters mit stark überlappenden Arbeitsbereichen erreicht und die Doppelarme geöffnet wurden kann für das Lernen von Mensch-Maschine-Fähigkeiten verwendet werden. Interoperable Ellipsoid-Tracking-Schnittstelle.
Letztendlich bietet das System umfassende Schnittstellen in Bezug auf Wahrnehmungsebene, Zweihand-Erfassung, kollaborative Betriebsplanung und zugrunde liegende Steuerung und weist eine hohe Vielseitigkeit, Skalierbarkeit und Kompatibilität auf.
Die technischen Details lauten wie folgt:
Geschicktes, erreichbares Sensor-Sub-Framework
Um ein kooperatives Erfassen unbekannter Objekte mit zwei Armen zu erreichen, ist es notwendig, unabhängig ausführbare Smart-Optimal-Programme zu generieren Greifen für das Dual-Arm-System Holen Sie sich das Richtige.
Die Forscher gingen von drei Ebenen aus: Datensatzgenerierung, Netzwerk zur Bewertung der Greifqualität und probabilistische Modellierung der Erreichbarkeit von Doppelarmrobotern, und entwarfen systematisch ein Sub-Framework für die Erreichbarkeit von Fingergriffen mit zwei Armen, um eine visuelle Systemwahrnehmung End-to zu erreichen -End-Mapping zwischen den erhaltenen 3D-Punktwolken des Objekts auf geschickte, optimale zweiarmige 6D-Greifhaltungspaare.
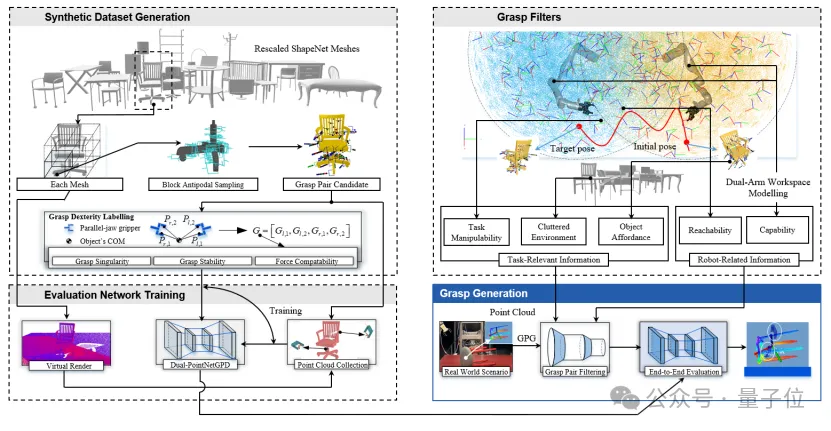
1. Zweiarmiger Greifdatensatz
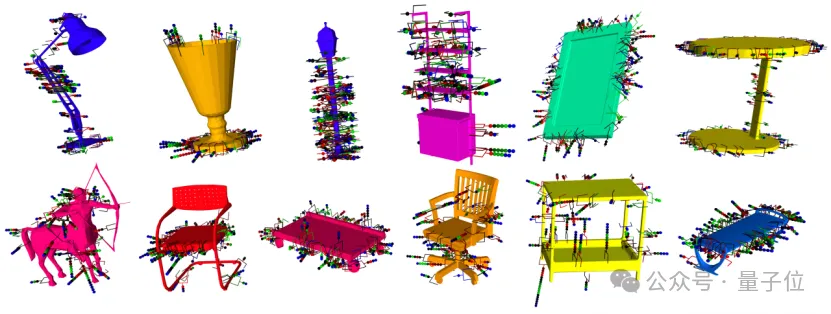
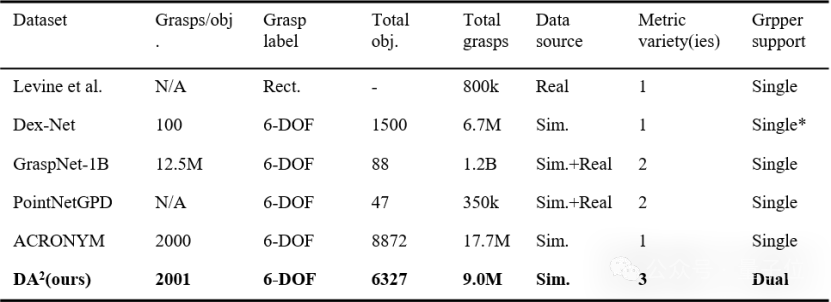
Um eine genaue Zuordnungsbeziehung zwischen der Eingabepunktwolke und der Ausgabequalität des zweiarmigen Greifens herzustellen und das Greifbewertungsnetzwerk effektiv zu trainieren schlug den branchenweit ersten groß angelegten synthetischen Datensatz zum Zweiarm-Greifen mit Geschicklichkeitserkennung (DA2-Datensatz) vor.
Dieser Datensatz enthält ein Netz aus 6327 Objekten und mehr als 9 Millionen Gruppen von Griffpaaren. Jede Gruppe von Griffen ist anhand von drei Indikatoren gekennzeichnet: Greifsingularität – Greifstabilität – Greifkraftkompatibilität.
2. Netzwerk zur Bewertung der Qualität des kooperativen Greifens von Armen as Die Qualität dieser Kandidaten-Greifpaare wird online in Echtzeit bewertet und die optimale Lösung ausgegeben.
Die Forscher entwickelten Dual-PointNetGPD, ein Qualitätsbewertungsnetzwerk für das kollaborative Greifen mit zwei Armen, und verwendeten den DA2-Datensatz für das Training. Im Vergleich zu herkömmlichen Analysemethoden, die auf vereinfachten Kontaktkraftmodellen basieren und auf präzisen geometrischen Objektmerkmalen basieren, kann das lernbasierte Dual-PointNetGPD verrauschte 3D-Punktwolken direkt verarbeiten und die Geschicklichkeit der Kandidaten für zweiarmige Greifkonfigurationen und die Zuverlässigkeitsbewertung verbessern. Somit robuster gegenüber weit verbreitetem visuellem Wahrnehmungsrauschen.3. Modellierung der Erreichbarkeit zweier Arme und optimale Greifzuordnung
Dual-PointNetGPD gibt die Struktur zur Bewertung der Greifpaarqualität aus der Perspektive der visuellen Wahrnehmung aus. Für ein bestimmtes Doppelarmrobotersystem muss diese ebenfalls ermittelt werden Die Roboterontologie befasst sich mit dem Problem der Erreichbarkeit von Kandidaten-Greifpaaren im Arbeitsbereich des Roboters und dem Problem der Zuordnung von Greifpaaren zwischen den Armen.
Die Forscher nutzten die Modellierungstechnologie des Unit-Quaternion-Gaußschen Mischungsmodells, um den 6-Freiheitsgrad-Arbeitsbereich beider Arme zu modellieren, und entwarfen eine Strategie zur Wahrscheinlichkeitsmaximierung, um die Bewertung der Greifzugänglichkeit und der Greifgeschicklichkeit beider Arme zu erreichen Einheit. Multifunktionaler Unterrahmen für die kollaborative BetriebssteuerungFür den multifunktionalen Unterrahmen für die kollaborative Betriebssteuerung ist die Fähigkeit, unbekannte Objekte kooperativ zu greifen, der erste Schritt, um eine Universalisierung beider Arme zu erreichen, und eine kollaborative Betriebsbewegungsplanung mit Körpersicherheitsbewusstsein ist der zweite Schritt Verbinden Sie universelles Crawling und implementieren Sie universelle Operationen. Da sich die Arbeitsräume der beiden Roboterarme des humanoiden Doppelarmrobotersystems häufig stark überlappen,Für den Roboterkörper, der dynamische Doppelarmaufgaben ausführt, muss der Vermeidung von Selbstkollisionen in der Bewegung höchste Priorität eingeräumt werden Planung
Zusätzlich zur Genauigkeit der Kollisionsvermeidung ist es auch notwendig, die Online-Berechnungskosten zu reduzieren, um eine Kollisionsvermeidung in Echtzeit sicherzustellen.Darüber hinaus muss das Doppelarm-Kollaborationsellipsoid als einer der wichtigen Betriebsleistungsindikatoren und zur Charakterisierung der Roboterfähigkeiten kontinuierlich gesteuert werden, um eine Echtzeitoptimierung der Roboterarmkonfiguration zu erreichen und dadurch die Bedienfertigkeit des Doppelarms zu verbessern -Arm-System und Vermeidung von Missionsfehlschlägen aufgrund operativer Singularität. Forscher haben zu diesem Zweck ein neues multifunktionales kollaboratives Untergerüst für die Betriebssteuerung entwickelt.
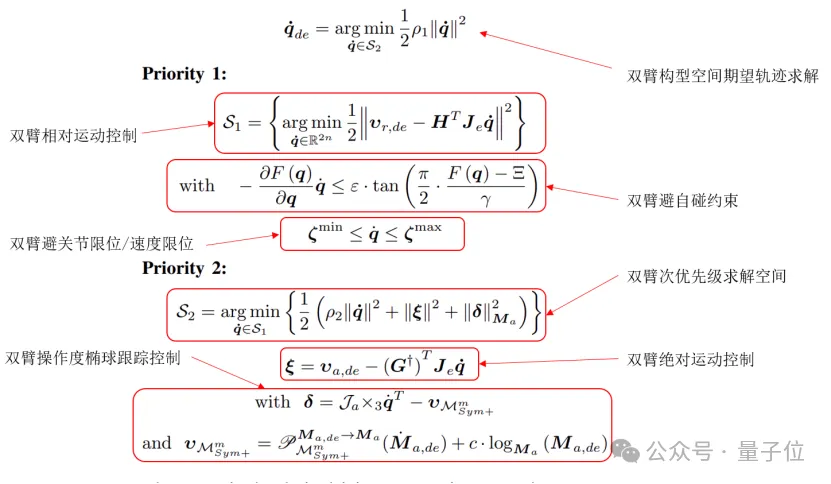
Dieses Framework basiert auf einem hierarchischen Optimierungsframework mit mehreren Zielen und mehreren Prioritäten, das die erlernte leichte zweiarmige Ersatzfunktion für den Mindestabstand und die Riemannsche Geschwindigkeitsverfolgungsaufgabe in verschiedene Prioritäten in Form von Ungleichheitsbeschränkungen einbettet. Dadurch wird die intrinsische Sicherheit der Bewegungsplanung für den Betrieb mit zwei Armen und die hohe Genauigkeit der Optimierung der Konfiguration mit zwei Armen beim Erlernen der Mensch-Maschine-Fertigkeitsübertragung erreicht.1. Hochpräzise Selbstkollisionsvermeidung beider Arme
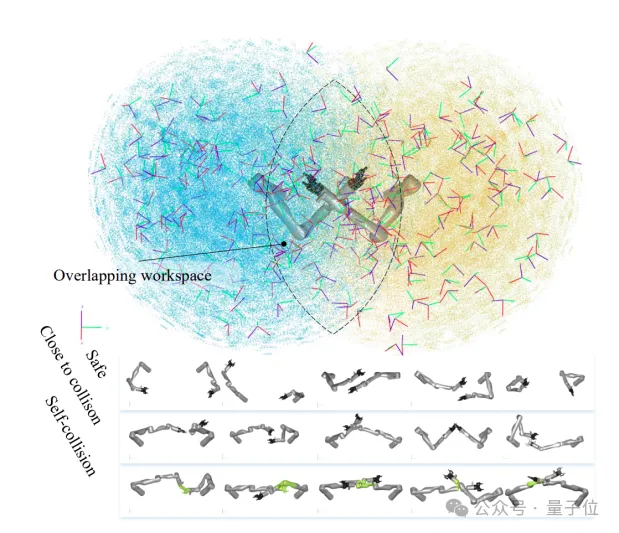
△ Ein humanoider Zweiarmroboter mit stark überlappenden Arbeitsbereichen
Um eine genaue und zuverlässige Mindestabstandsfunktion zu erhalten, die die Kollisionsgrenze beider Arme beschreibt besteht darin, die Kollisionsvermeidungsbeschränkungen in einen wichtigen Schritt im Multiprioritätsoptimierungsrahmen einzubetten, um eine Selbstkollisionsvermeidung mit beiden Armen zu erreichen.
Aufgrund der hohen Dimensionalität des Dual-Arm-Konfigurationsraums und der überlappenden Arbeitsräume ist die Verteilung des Sicherheits-Unterraums und des Kollisions-Unterraums stark unausgewogen und schwer zu trennen.
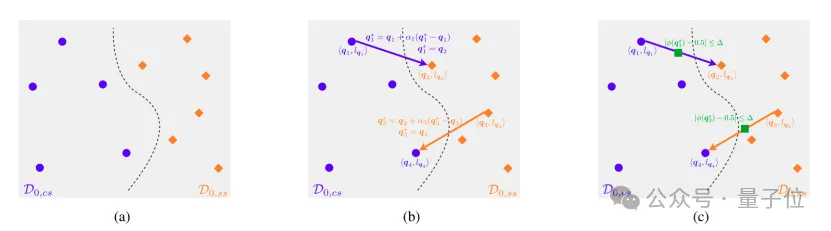
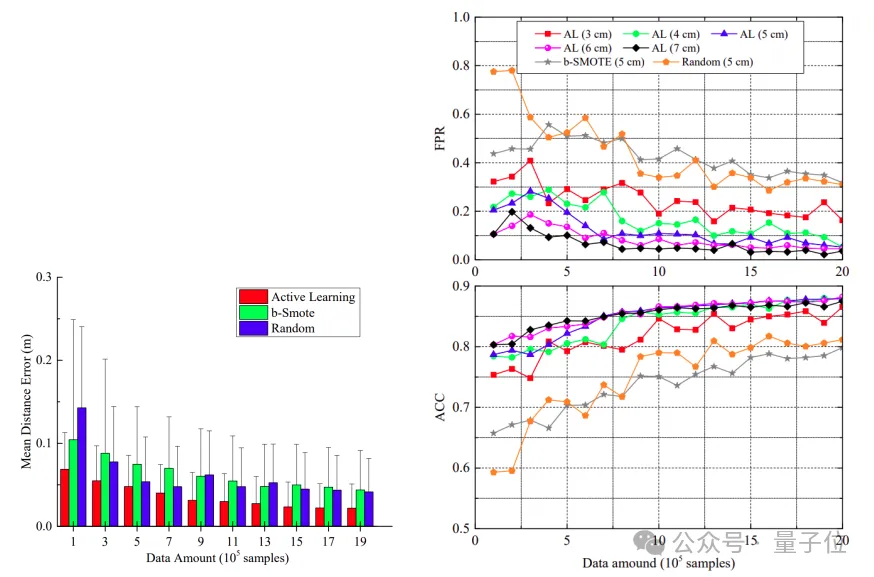
Forscher schlagen eine neuartige, auf aktivem Lernen basierende Stichprobenmethode vor, um groß angelegte, ausgewogene und informationsreiche Datensätze zu Doppelarmkollisionen zu generieren.
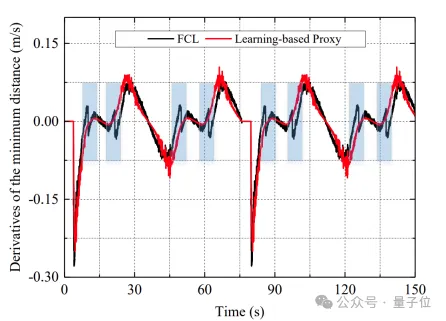
Dann verwenden Sie maschinelles Lernen, um die Zuordnungsbeziehung zwischen dem Mindestabstand zwischen den Armen und der Konfiguration der Arme anzupassen und so effizient eine hochpräzise Ersatzfunktion für den Mindestabstand zu erhalten.
△Schematisches Diagramm des Abtastalgorithmus basierend auf aktivem Lernen
2. Doppelarmige kollaborative Betriebsellipsoidverfolgung basierend auf Riemannscher Geometrie
Zusätzlich zur Selbstkollisionsvermeidung hängt die Betriebsellipsoidverfolgung mit den Bedienfähigkeiten zusammen Es hängt stark von der Betriebskonfiguration ab und ist auch ein zentrales Thema, das bei der Steuerung des Doppelarmsystems berücksichtigt werden muss.
Das Dual-Arm-Betriebsgrad-Ellipsoid wird durch eine symmetrische positiv-definite Matrix (SPD) beschrieben. Durch die Gestaltung des Geschwindigkeits-Feedforward-Terms im Mannigfaltigkeitsraum und die Kombination mit dem Fehlerkontrollprinzip erreichten die Forscher eine Echtzeitverfolgung und -verfolgung Es wird die globale exponentielle Konvergenz des Fehlers sowie eine vollständige theoretische Analyse und ein Beweis gegeben.
Die Aufgabe zur Verfolgung von Ellipsoiden mit zwei Armen ist in Form von Gleichheitsbeschränkungen in das Optimierungsframework mit mehreren Prioritäten eingebettet und wird in Form einer Schnittstelle zur Verfolgung von Ellipsoiden mit zwei Armen dargestellt.
3. Multiprioritätsoptimierung und Controller-Design
Die Forscher verwendeten kollaborative Aufgabenraumvariablen (absolute Bewegung beider Arme und relative Bewegung beider Arme), um alle kollaborativen, nicht kooperativen/synchronen und asynchronen Doppelarme zu beschreiben Aufgaben, und basierend auf dem Multi-Ziel- und Multi-Prioritäts-Framework wird ein System-Framework für die universelle kollaborative Betriebssteuerung beider Arme entworfen.
Dieses Framework integriert organisch die oben genannten vielfältigen Aufgaben wie die Vermeidung von Selbstkollisionen beider Arme und die Ellipsoidverfolgung beider Arme und beseitigt so die Hindernisse für die Generalisierung beider Arme auf der Ebene der Bewegungsplanung und -steuerung.
Hervorragend geeignet für kollaboratives Greifen und Selbstkollisionsvermeidung
Um die Wirksamkeit des optimalen kollaborativen Greifens beider Arme, der Selbstkollisionsvermeidung beider Arme und der Ellipsoidverfolgung der kollaborativen Betätigung beider Arme zu überprüfen, haben die Forscher durchgeführt: Das entworfene Dual-PointNetGPD-Netzwerk, die durch Lernen generierte Ersatzfunktion für den minimalen Abstand für beide Arme und der SPD-Mannigfaltigkeits-Tracking-Fehler wurden quantitativ analysiert.
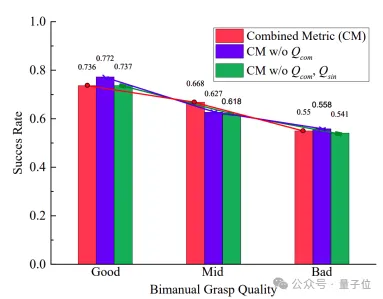
1. Optimales kooperatives Greifen beider Arme Die Forscher führten groß angelegte Ablationsexperimente in der Physiksimulations-Engine durch. Die Ergebnisse zeigten, dass das entworfene und trainierte Dual-PointNetGPD-Netzwerk das Greifen großer, nicht modellierter Objekte effektiv verbesserte. Die Erfolgsquote des zweiarmigen kooperativen Greifens bei der Aufgabe .
2. Selbstkollisionsvermeidung mit beiden ArmenAnalysieren Sie hauptsächlich die beiden Dimensionen der Generierung des Doppelarm-Kollisionsdatensatzes und der Mindestabstands-Proxy-Funktion beider Arme 14-dimensional, 20–30° ist der Abtastschritt für die Abtastung mit geringer Genauigkeit, und jede Dimension ist in 10 gleiche Teile unterteilt. Die erforderliche Datensatzgröße erreicht ebenfalls 1014.
, was deutlich weniger ist der weit verbreiteten 5,36 ms, die von der FCL-Algorithmusbibliothek benötigt werden, und die Varianz ist kleiner. Dies verbessert die Echtzeitleistung der Methode während des tatsächlichen Einsatzes erheblich und gewährleistet eine stabile und vorhersehbare Planung der gesamten doppelarmigen koordinierten Bewegungsplanung.
Darüber hinaus weist die Ersatzfunktion eine hervorragende Kontinuität und Differenzierbarkeit auf, was für die Einbettung der Selbstkollisionsvermeidung in das reibungslose Multi-Ziel-Optimierungsframework in Form von Ungleichheitsbeschränkungen sehr wichtig ist.
3. Vergleichende Analyse der Tabellenberechnungszeit Optimierungsrahmen: Die Operationen in der Ellipsoid-Tracking-Beschränkung reduzieren effektiv den Unterschied zwischen der tatsächlichen Konfiguration und der erwarteten Konfiguration der Arme und überprüfen so die Wirksamkeit der SPD-Mannigfaltigkeits-Tracking-Schnittstelle.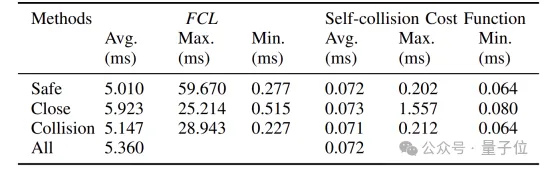
4. Kooperatives Arm-Arm-Umdrehexperiment: 
Um die Fähigkeit zur autonomen Vermeidung von Selbstkollisionen zu überprüfen, entwickelten die Forscher ein kooperatives Umdrehexperiment, das eine extreme Torsion erfordert.
In diesem Experiment vervollständigte das Zweiarmsystem unabhängig voneinander die ineinander verschlungene und kollisionsfreie Bewegungsplanung der Flugbahn und realisierte die 360°-Klappbedienung des Stuhls, ohne die Griffkonfiguration zu ändern. Die absolute Bewegung des Objekts behält immer eine hochpräzise Verfolgung in der Rotationsrichtung bei und entspannt sich dynamisch und autonom in anderen Freiheitsgraden. Der relative Bewegungsfehler der Arme beträgt weniger als 0,003 (m oder rad) und die Kollision Der Ausweichsicherheitsabstand wird effizient auf 2,5 cm komprimiert.
Gleichzeitig beträgt die typische Berechnungszeit des gesamten multifunktionalen kollaborativen Betriebssteuerungs-Unterrahmens unter Verwendung des hochpräzisen Gittermodells des Roboterarms 8,318 ms, was das Dilemma von hoher Präzision und hoher Echtzeit löst Leistung nicht gleichzeitig erreicht wird.
Die obigen Ergebnisse zeigen auch, dass Aufgaben auf allen Ebenen streng nach den vorgegebenen Prioritäten ausgeführt werden. 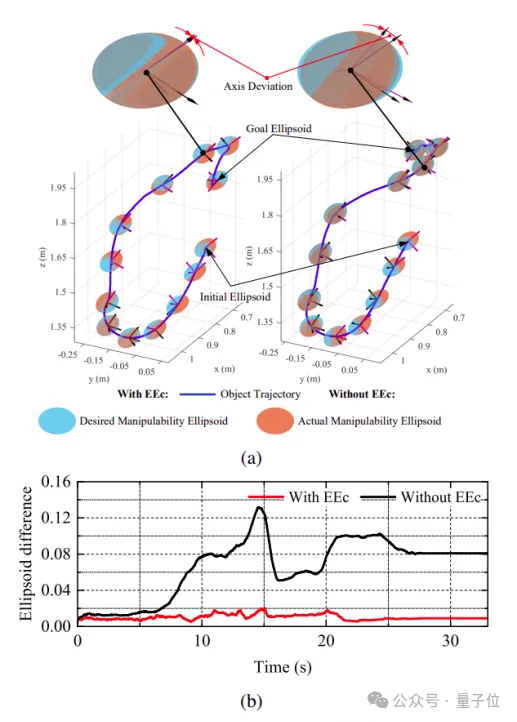
Die experimentellen Ergebnisse zeigen, dass der Zweiarmroboter große Objekte unter dem entworfenen universellen Rahmen kooperativ greifen und Selbstkollisionen vermeiden kann, indem er völlig autonom und hochpräzise komplexe kollaborative Betriebsaufgaben ausführt.
Zusammenfassung: Wie Sie sehen können, löste diese Forschung erstmals systematisch das kollaborative optimale Greifen unbekannter Objekte mit zwei Armen auf der Grundlage der visuellen Wahrnehmung und erreichte so die Eigensicherheit eines zweiarmigen Roboters mit hoher Überlappung Arbeitsräume und deren Öffnung Eine Ellipsoid-Tracking-Schnittstelle für den kollaborativen Betrieb mit zwei Armen, die für das Erlernen der Mensch-Maschine-Fähigkeitsübertragung verwendet werden kann. Diese Top-Down-Studie zur verkörperten Intelligenz und Bottom-Up-Studie zur Roboterbetriebsplanung und -steuerung wird dazu beitragen, die technische Lücke zwischen KI und Robotik zu schließen und die Anwendung von KI-generierten Betriebsstrategien in der physischen Welt zu verbessern der Ausführung beschleunigen die Einführung einer vollständig autonomen Verallgemeinerung zweiarmiger Systeme.Papieradresse: 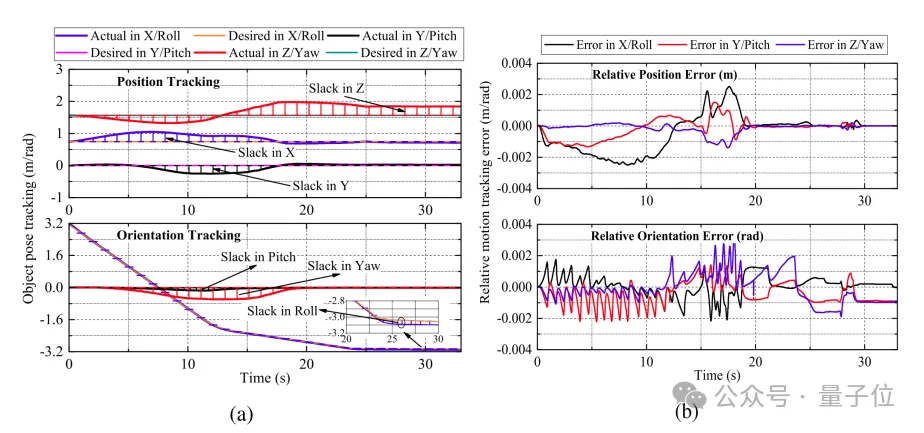
Das obige ist der detaillierte Inhalt vonTencent Robot Research ist das Thema! Es kann Programmierern helfen, Monitore zu installieren und wie echte Menschen zusammenzuarbeiten. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1359
1359
 52
52

 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI verändert tatsächlich die Mathematik. Vor kurzem hat Tao Zhexuan, der diesem Thema große Aufmerksamkeit gewidmet hat, die neueste Ausgabe des „Bulletin of the American Mathematical Society“ (Bulletin der American Mathematical Society) weitergeleitet. Zum Thema „Werden Maschinen die Mathematik verändern?“ äußerten viele Mathematiker ihre Meinung. Der gesamte Prozess war voller Funken, knallhart und aufregend. Der Autor verfügt über eine starke Besetzung, darunter der Fields-Medaillengewinner Akshay Venkatesh, der chinesische Mathematiker Zheng Lejun, der NYU-Informatiker Ernest Davis und viele andere bekannte Wissenschaftler der Branche. Die Welt der KI hat sich dramatisch verändert. Viele dieser Artikel wurden vor einem Jahr eingereicht.
 Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Stehen Sie vor einer Verzögerung oder einer langsamen mobilen Datenverbindung auf dem iPhone? Normalerweise hängt die Stärke des Mobilfunk-Internets auf Ihrem Telefon von mehreren Faktoren ab, wie z. B. der Region, dem Mobilfunknetztyp, dem Roaming-Typ usw. Es gibt einige Dinge, die Sie tun können, um eine schnellere und zuverlässigere Mobilfunk-Internetverbindung zu erhalten. Fix 1 – Neustart des iPhone erzwingen Manchmal werden durch einen erzwungenen Neustart Ihres Geräts viele Dinge zurückgesetzt, einschließlich der Mobilfunkverbindung. Schritt 1 – Drücken Sie einfach einmal die Lauter-Taste und lassen Sie sie los. Drücken Sie anschließend die Leiser-Taste und lassen Sie sie wieder los. Schritt 2 – Der nächste Teil des Prozesses besteht darin, die Taste auf der rechten Seite gedrückt zu halten. Lassen Sie das iPhone den Neustart abschließen. Aktivieren Sie Mobilfunkdaten und überprüfen Sie die Netzwerkgeschwindigkeit. Überprüfen Sie es erneut. Fix 2 – Datenmodus ändern 5G bietet zwar bessere Netzwerkgeschwindigkeiten, funktioniert jedoch besser, wenn das Signal schwächer ist
 Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Die Vitalität der Superintelligenz erwacht! Aber mit der Einführung der sich selbst aktualisierenden KI müssen sich Mütter keine Sorgen mehr über Datenengpässe machen
Apr 29, 2024 pm 06:55 PM
Ich weine zu Tode. Die Daten im Internet reichen überhaupt nicht aus. Das Trainingsmodell sieht aus wie „Die Tribute von Panem“, und KI-Forscher auf der ganzen Welt machen sich Gedanken darüber, wie sie diese datenhungrigen Esser ernähren sollen. Dieses Problem tritt insbesondere bei multimodalen Aufgaben auf. Zu einer Zeit, als sie ratlos waren, nutzte ein Start-up-Team der Abteilung der Renmin-Universität von China sein eigenes neues Modell, um als erstes in China einen „modellgenerierten Datenfeed selbst“ in die Realität umzusetzen. Darüber hinaus handelt es sich um einen zweigleisigen Ansatz auf der Verständnisseite und der Generierungsseite. Beide Seiten können hochwertige, multimodale neue Daten generieren und Datenrückmeldungen an das Modell selbst liefern. Was ist ein Modell? Awaker 1.0, ein großes multimodales Modell, das gerade im Zhongguancun-Forum erschienen ist. Wer ist das Team? Sophon-Motor. Gegründet von Gao Yizhao, einem Doktoranden an der Hillhouse School of Artificial Intelligence der Renmin University.
 Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Kürzlich wurde die Militärwelt von der Nachricht überwältigt: US-Militärkampfflugzeuge können jetzt mithilfe von KI vollautomatische Luftkämpfe absolvieren. Ja, erst kürzlich wurde der KI-Kampfjet des US-Militärs zum ersten Mal der Öffentlichkeit zugänglich gemacht und sein Geheimnis gelüftet. Der vollständige Name dieses Jägers lautet „Variable Stability Simulator Test Aircraft“ (VISTA). Er wurde vom Minister der US-Luftwaffe persönlich geflogen, um einen Eins-gegen-eins-Luftkampf zu simulieren. Am 2. Mai startete US-Luftwaffenminister Frank Kendall mit einer X-62AVISTA auf der Edwards Air Force Base. Beachten Sie, dass während des einstündigen Fluges alle Flugaktionen autonom von der KI durchgeführt wurden! Kendall sagte: „In den letzten Jahrzehnten haben wir über das unbegrenzte Potenzial des autonomen Luft-Luft-Kampfes nachgedacht, aber es schien immer unerreichbar.“ Nun jedoch,
