
 Technologie-Peripheriegeräte
KI
„Es ist schwer, zwischen wahr und falsch zu unterscheiden'! Clevere Nutzung der von NeRF generierten autonomen Fahrsimulationsdaten
Technologie-Peripheriegeräte
KI
„Es ist schwer, zwischen wahr und falsch zu unterscheiden'! Clevere Nutzung der von NeRF generierten autonomen Fahrsimulationsdaten
„Es ist schwer, zwischen wahr und falsch zu unterscheiden'! Clevere Nutzung der von NeRF generierten autonomen Fahrsimulationsdaten

Vorher geschrieben und nach persönlichem Verständnis des Autors
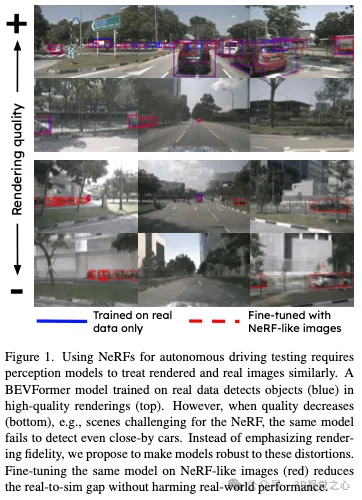
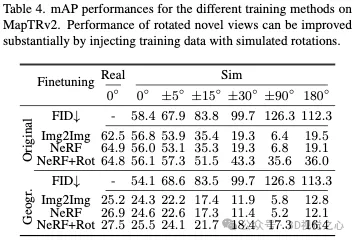
Neural Radiation Field (NeRF) ist zu einem Werkzeug geworden, das den Auftakt für die Forschung zum autonomen Fahren (AD) vorantreibt und skalierbare Closed-Loop-Simulations- und Datenverbesserungsfunktionen bietet. Um jedoch den Ergebnissen der Simulation vertrauen zu können, muss sichergestellt werden, dass das AD-System die realen Daten und die gerenderten Daten auf die gleiche Weise wahrnimmt. Obwohl sich die Leistung der Rendering-Methoden verbessert, ist es immer noch schwierig, viele Szenen originalgetreu zu rekonstruieren. Zu diesem Zweck schlagen wir eine neue Perspektive vor, um die Lücke zwischen realen und simulierten Daten zu schließen. Wir konzentrieren uns nicht nur auf die Verbesserung der Wiedergabetreue, sondern erforschen auch einfache, aber effektive Methoden, um die Robustheit von Wahrnehmungsmodellen gegenüber NeRF-Artefakten zu verbessern, ohne die Leistung realer Daten zu beeinträchtigen. Darüber hinaus führen wir die erste groß angelegte Untersuchung der Lücke zwischen realen und simulierten Daten in AD-Umgebungen durch, wobei wir modernste neuronale Rendering-Techniken verwenden. Konkret evaluiert unsere Studie Objektdetektoren und Online-Mapping-Modelle anhand realer und simulierter Daten und untersucht die Auswirkungen verschiedener Pre-Training-Strategien. Unsere Ergebnisse zeigen eine deutlich verbesserte Modellgenauigkeit bei simulierten Daten und in einigen Fällen sogar eine Verbesserung der realen Leistung. Abschließend befassen wir uns mit den realen und simulierten Ähnlichkeiten und identifizieren FID und LPIPS als starke Indikatoren.
In diesem Artikel schlagen wir eine neue Perspektive vor, um die Lücke zwischen intelligenten Fahrsystemen und Wahrnehmungsmodulen zu schließen. Unser Ziel besteht nicht darin, die Rendering-Qualität zu verbessern, sondern das Wahrnehmungsmodell robuster gegenüber NeRF-Artefakten zu machen, ohne die Leistung bei realen Daten zu beeinträchtigen. Wir glauben, dass diese Richtung die Verbesserung der NeRF-Leistung ergänzt und der Schlüssel zur Ermöglichung virtueller AV-Tests ist. Als ersten Schritt in diese Richtung zeigen wir, dass selbst einfache Techniken zur Datenerweiterung einen starken Einfluss auf die Robustheit des Modells gegenüber NeRF-Artefakten haben können.
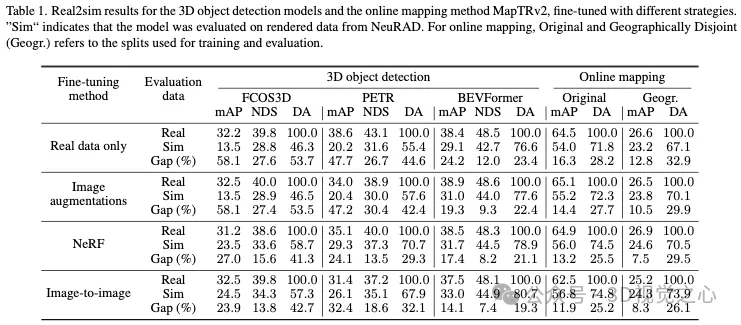
Wir führen die erste umfassende real2sim+Gap-Studie an einem großen AD-Datensatz durch und bewerten die Leistung mehrerer Objektdetektoren sowie Online-Mapping-Modelle anhand realer Daten und Daten modernster neuronaler Rendering-Methoden (SOTA). . Unsere Studie umfasst die Auswirkungen verschiedener Datenerweiterungstechniken während des Trainings und die Genauigkeit der NeRF-Wiedergabe während der Inferenz. Wir haben festgestellt, dass diese Daten während der Feinabstimmung des Modells die Auswirkungen der Erweiterungstechnik und die Wiedergabetreue von NeRF zeigten und in einigen Fällen sogar die Leistung bei realen Daten verbesserten. Abschließend untersuchen wir die Korrelation zwischen impliziten und allgemeinen Bildrekonstruktionsmetriken in real2sim und gewinnen Einblicke in die Bedeutung der Verwendung von NeRFs für CAD-Datensimulatoren. Wir stellen fest, dass LPIPS und FID aussagekräftige Indikatoren für die real2sim-Disparität sind, und bestätigen weiterhin, dass unsere vorgeschlagene Verbesserung die Empfindlichkeit kontrastarmer visueller Kompositionen verringert.
Detaillierte Methodenerklärung
Um die AD-Fähigkeiten der NeRF-gesteuerten Simulations-Engine zu testen und zu validieren, können sie die gesammelten Daten nutzen, um neue virtuelle Szenarien zu erkunden. Damit die Ergebnisse solcher Modelle jedoch vertrauenswürdig sind, muss sich das AD-System bei der Verarbeitung der Daten und der tatsächlichen Daten gleich verhalten. In dieser Arbeit schlagen wir einen alternativen und ergänzenden Ansatz zur Anpassung von AD-Systemen vor, um sie weniger empfindlich gegenüber Unterschieden zwischen realen und simulierten Daten zu machen. Auf diese Weise können wir das AD-System so einstellen, dass es weniger empfindlich auf Unterschiede zwischen realen und simulierten Daten reagiert und so besser mit Unterschieden zwischen realen und simulierten Daten umgehen kann.
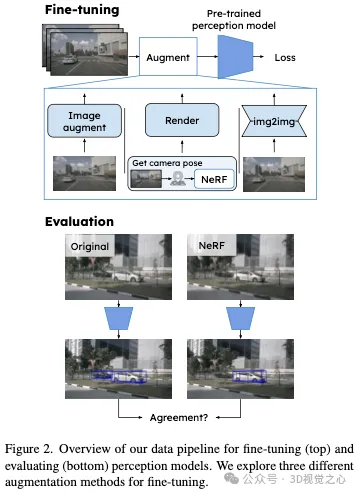
Als ersten Schritt bei der Untersuchung, wie Feinabstimmungsstrategien Wahrnehmungsmodelle robuster gegenüber Artefakten in gerenderten Daten machen können, verwendeten wir verschiedene Feinabstimmungsstrategien. Konkret optimieren wir anhand eines bereits trainierten Modells das Wahrnehmungsmodell mithilfe von Bildern, die sich auf die Verbesserung der Leistung gerenderter Bilder bei gleichzeitiger Beibehaltung der Leistung bei realen Daten konzentrieren (siehe Abbildung 2). Neben der Verringerung der real2SIM-Lücke kann dies auch die Anforderungen an den Sensorrealismus verringern, den Weg für eine breitere Anwendung neuronaler Rendering-Methoden ebnen und den Rechenaufwand für das Training und die Bewertung von Beschreibungsmethoden verringern. Beachten Sie, dass wir uns zwar auf Wahrnehmungsmodelle konzentrieren, unser Ansatz jedoch problemlos auch auf End-to-End-Modelle ausgeweitet werden kann.
Schließlich können wir uns mehrere Wege vorstellen, um das Ziel zu erreichen, Modelle robuster zu machen, beispielsweise indem wir uns von der Domänenanpassungs- und Multitasking-Lernliteratur inspirieren lassen. Für die Feinabstimmung sind jedoch nur minimale modellspezifische Anpassungen erforderlich, sodass wir eine Reihe von Modellen problemlos untersuchen können.
Bildvergrößerung
Bildvergrößerung ist eine häufig verwendete Methode, und die klassische Strategie zur Verbesserung der Robustheit gegenüber Artefakten ist die Verwendung von Bildvergrößerung. Hier wählen wir Verbesserungen aus, um die verschiedenen im gerenderten Bild vorhandenen Verzerrungen darzustellen. Genauer gesagt fügen wir zufälliges Gaußsches Rauschen hinzu und falten das Bild mit einem Gaußschen Unschärfekern, wobei wir eine photometrische Verzerrung anwenden, die der in SimCLR vorkommt. Abschließend wird das Bild herunter- und hochgesampelt. Erweiterungen werden nacheinander angewendet, und jede Erweiterung hat eine bestimmte Wahrscheinlichkeit.
Feinabstimmung mit eingemischten gerenderten Bildern
NeRF ist ein Deep-Learning-Modell zum Rendern von 3D-Szenen. Bei der Feinabstimmung kann sich das Modell an eine andere natürliche Form anpassen, d. h. diese Daten bei der Feinabstimmung einbeziehen. Dies erleichtert die Möglichkeit, NeRF-Modelle zu trainieren, sodass NeRF-Methoden auf demselben Datensatz wie das überwachungsbewusste Modell trainiert werden können. Allerdings kann das Training von NeRF für große Datensätze kostspielig sein, und einige davon erfordern möglicherweise Beschriftungen für Aufgaben wie 3D-Objekterkennung, semantische Segmentierung oder Beschriftungen mehrerer Kategorien. Darüber hinaus erhöht NeRF von AD häufig die Anforderungen an die Reihenfolge der Daten. Um sich an diese Anforderungen anzupassen, erfordern Etiketten möglicherweise eine speziellere Verarbeitung, z. B. 3D-Objekterkennung, semantische Segmentierung oder Etiketten mehrerer Kategorien usw.
Als nächstes teilen wir die Bilder der ausgewählten Sequenz in einen NeRF-Trainingssatz und einen Holdout-Satz auf. Die Feinabstimmung der Wahrnehmungsmodelle erfolgt an ihrem gesamten Trainingsdatensatz D, und für Bilder mit Rendering-Korrespondenzen in D verwenden wir das gerenderte Bild mit der Wahrscheinlichkeit p. Dies bedeutet, dass die zur Feinabstimmung verwendeten Bilder vom NeRF-Modell nicht gesehen werden.
Bild-zu-Bild-Übersetzung
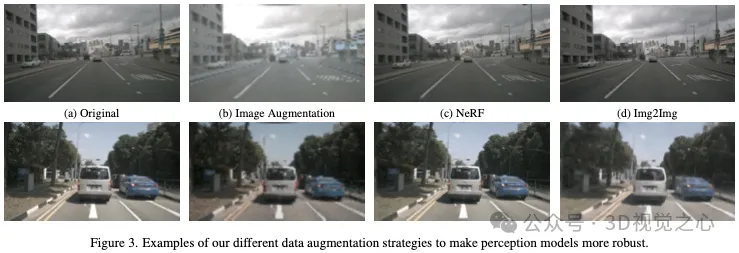
Wie bereits erwähnt, ist das Rendern von NeRF-Daten eine teure Datenerweiterungstechnik. Darüber hinaus sind neben den für die Wahrnehmungsaufgabe erforderlichen Daten auch sequentielle Daten und möglicherweise zusätzliche Marker erforderlich. Das heißt, für einen skalierbaren Ansatz wünschen wir uns idealerweise eine effiziente Strategie, um NeRF-Daten für ein einzelnes Bild zu erhalten. Zu diesem Zweck schlagen wir vor, einen Bild-zu-Bild-Ansatz zu verwenden, um zu lernen, NeRF-ähnliche Bilder zu erzeugen. Bei einem gegebenen realen Bild wandelt das Modell das Bild in die NeRF-Domäne um und führt so effektiv für NeRF typische Artefakte ein. Dies ermöglicht es uns, die Anzahl der NeRF-ähnlichen Bilder während der Feinabstimmung bei begrenztem Rechenaufwand deutlich zu erhöhen. Wir trainieren das Bild-zu-Bild-Modell mithilfe der gerenderten Bilder von Dnerf und der entsprechenden realen Bilder. Visuelle Beispiele für verschiedene Verbesserungsstrategien sind in Abbildung 3 dargestellt.
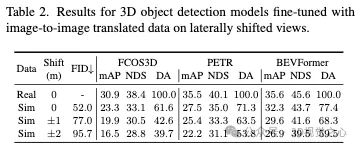
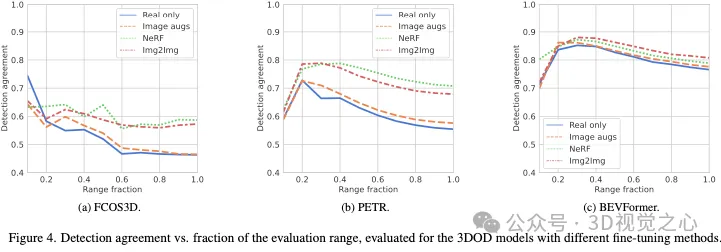
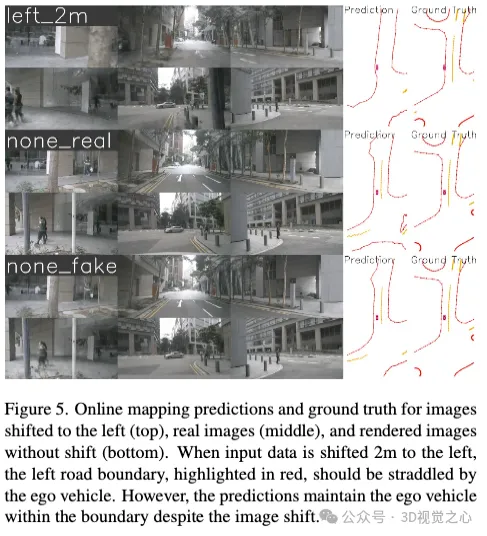
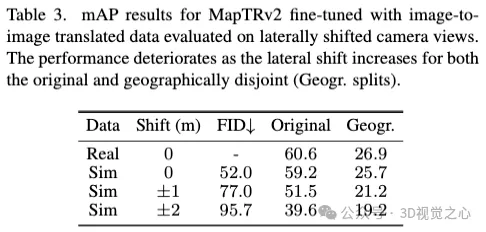
Ergebnis
Fazit
Neural Radiation Field (NeRF) ist zu einem Teil der Simulation autonomen Fahrens (AD) geworden. Daten ein vielversprechender Ansatz. Aus praktischen Gründen ist es jedoch notwendig zu verstehen, wie die vom AD-System an simulierten Daten durchgeführten Aktionen auf reale Daten übertragen werden. Unsere groß angelegte Untersuchung zeigt eine Leistungslücke zwischen Wahrnehmungsmodellen, die simulierten und realen Bildern ausgesetzt sind.
Im Gegensatz zu früheren Ansätzen, die sich auf die Verbesserung der Rendering-Qualität konzentrierten, untersucht dieser Artikel, wie das Wahrnehmungsmodell geändert werden kann, um es robuster gegenüber NeRF-Simulationsdaten zu machen. Wir zeigen, dass die Feinabstimmung mit NeRF- oder NeRF-ähnlichen Daten die real2sim-Lücke bei Objekterkennungs- und Online-Mapping-Methoden erheblich verringert, ohne die Leistung bei realen Daten zu beeinträchtigen. Darüber hinaus zeigen wir, dass die Erstellung neuer Szenarien außerhalb bestehender Zugverteilungen, wie z. B. die Simulation von Spurverlassen, die Leistung anhand realer Daten verbessern kann. Eine Studie häufig verwendeter Bildmetriken innerhalb der NeRF-Community zeigt, dass LPIPS- und FID-Scores die stärkste Korrelation mit der Wahrnehmungsleistung aufweisen. Dies legt nahe, dass Wahrnehmungsähnlichkeit für Wahrnehmungsmodelle eine größere Bedeutung hat als bloße Rekonstruktionsqualität.
Zusammenfassend glauben wir, dass die NeRF-Simulationsdaten für AD wertvoll sind, insbesondere wenn wir unsere vorgeschlagene Methode verwenden, um die Robustheit des Wahrnehmungsmodells zu verbessern. Darüber hinaus helfen NeRF-Daten nicht nur beim Testen von AD-Systemen anhand simulierter Daten, sondern tragen auch dazu bei, die Leistung von Wahrnehmungsmodellen anhand realer Daten zu verbessern.
Das obige ist der detaillierte Inhalt von„Es ist schwer, zwischen wahr und falsch zu unterscheiden'! Clevere Nutzung der von NeRF generierten autonomen Fahrsimulationsdaten. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1359
1359
 52
52

 Einführung in die Verwendung des Joiplay-Simulators
May 04, 2024 pm 06:40 PM
Einführung in die Verwendung des Joiplay-Simulators
May 04, 2024 pm 06:40 PM
Der Jojplay-Simulator ist ein sehr einfach zu bedienender Mobiltelefonsimulator. Er unterstützt Computerspiele und kann auf Mobiltelefonen ausgeführt werden. Einige Spieler wissen nicht, wie man ihn verwendet wie man es benutzt. So verwenden Sie den Joiplay-Simulator 1. Zuerst müssen Sie den Joiplay-Body und das RPGM-Plug-in herunterladen. Am besten installieren Sie sie in der Reihenfolge Body – Plug-in. Das APK-Paket erhalten Sie in der Joiplay-Leiste. Klicken Sie hier, um >>> zu erhalten. 2. Nachdem Android fertig ist, können Sie in der unteren linken Ecke Spiele hinzufügen. 3. Geben Sie den Namen nach und nach ein und drücken Sie bei der ausführbaren Datei auf „Auswählen“, um die Datei „game.exe“ des Spiels auszuwählen. 4. Das Symbol kann leer bleiben oder Sie können Ihr Lieblingsbild auswählen.
 So aktivieren Sie VT auf dem MSI-Motherboard
May 01, 2024 am 09:28 AM
So aktivieren Sie VT auf dem MSI-Motherboard
May 01, 2024 am 09:28 AM
Wie aktiviere ich VT auf einem MSI-Motherboard? Welche Methoden gibt es? Diese Seite hat die MSI-Motherboard-VT-Aktivierungsmethoden für die Mehrheit der Benutzer sorgfältig zusammengestellt. Willkommen zum Lesen und Teilen! Der erste Schritt besteht darin, den Computer neu zu starten und das BIOS aufzurufen. Was soll ich tun, wenn die Startgeschwindigkeit zu hoch ist und ich das BIOS nicht aufrufen kann? Nachdem der Bildschirm aufleuchtet, drücken Sie weiter „Entf“, um die BIOS-Seite aufzurufen. Der zweite Schritt besteht darin, die VT-Option im Menü zu finden und zu aktivieren. Verschiedene Computermodelle haben unterschiedliche BIOS-Schnittstellen und unterschiedliche Namen für VT : 1. Geben Sie ein. Nachdem Sie die BIOS-Seite aufgerufen haben, suchen Sie die Option „OC (oder Übertaktung)“ – „CPU-Funktionen“ – „SVMMode (oder Intel Virtualization Technology)“ und ändern Sie die Option „Deaktiviert“.
 So aktivieren Sie VT auf dem ASRock-Motherboard
May 01, 2024 am 08:49 AM
So aktivieren Sie VT auf dem ASRock-Motherboard
May 01, 2024 am 08:49 AM
Wie aktiviert man VT auf dem ASRock-Motherboard, welche Methoden gibt es und wie wird es bedient? Diese Website hat die ASRock-Motherboard-VT-Aktivierungsmethode zusammengestellt, damit Benutzer sie lesen und teilen können! Der erste Schritt besteht darin, den Computer neu zu starten. Drücken Sie weiterhin die Taste „F2“, um die BIOS-Seite aufzurufen. Was soll ich tun, wenn die Startgeschwindigkeit zu hoch ist und ich das BIOS nicht aufrufen kann? Der zweite Schritt besteht darin, die VT-Option im Menü zu finden und zu aktivieren. Verschiedene Motherboard-Modelle haben unterschiedliche BIOS-Schnittstellen und unterschiedliche Namen für VT 1. Suchen Sie nach dem Aufrufen der BIOS-Seite nach „Erweitert“ – „CPU-Konfiguration“. (CPU-Konfiguration)“ – Option „SVMMOD (Virtualisierungstechnologie)“, ändern Sie „Deaktiviert“ in „Aktiviert“.
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 So installieren Sie das Windows-System auf einem Tablet-Computer
May 03, 2024 pm 01:04 PM
So installieren Sie das Windows-System auf einem Tablet-Computer
May 03, 2024 pm 01:04 PM
Wie flasht man das Windows-System auf einem BBK-Tablet? Die erste Möglichkeit besteht darin, das System auf der Festplatte zu installieren. Solange das Computersystem nicht abstürzt, können Sie das System betreten und Dinge herunterladen. Sie können die Festplatte des Computers verwenden, um das System zu installieren. Die Methode ist wie folgt: Abhängig von Ihrer Computerkonfiguration können Sie das Betriebssystem WIN7 installieren. Wir haben uns entschieden, das Ein-Klick-Neuinstallationssystem von Xiaobai in vivopad herunterzuladen, um es zu installieren. Wählen Sie zunächst die für Ihren Computer geeignete Systemversion aus und klicken Sie auf „Dieses System installieren“, um zum nächsten Schritt zu gelangen. Dann warten wir geduldig darauf, dass die Installationsressourcen heruntergeladen werden, und warten dann darauf, dass die Umgebung bereitgestellt und neu gestartet wird. Die Schritte zum Installieren von Win11 auf dem Vivopad sind: Überprüfen Sie zunächst mithilfe der Software, ob Win11 installiert werden kann. Geben Sie nach bestandener Systemerkennung die Systemeinstellungen ein. Wählen Sie dort die Option Update & Sicherheit. Klicken
 Leitfaden für den Lebensneustart-Simulator
May 07, 2024 pm 05:28 PM
Leitfaden für den Lebensneustart-Simulator
May 07, 2024 pm 05:28 PM
Life Restart Simulator ist ein sehr interessantes Simulationsspiel. Es gibt viele Möglichkeiten, das Spiel zu spielen. Schauen Sie sich das Spiel an Strategien gibt es? Life Restart Simulator-Anleitung Anleitung Funktionen von Life Restart Simulator Dies ist ein sehr kreatives Spiel, in dem Spieler nach ihren eigenen Vorstellungen spielen können. Es gibt jeden Tag viele Aufgaben zu erledigen und Sie können ein neues Leben in dieser virtuellen Welt genießen. Es gibt viele Lieder im Spiel und alle möglichen Leben warten darauf, von Ihnen erlebt zu werden. Spielinhalt des Life Restart Simulators Talent-Zeichnungskarten: Talent: Sie müssen die geheimnisvolle kleine Kiste auswählen, um ein Unsterblicher zu werden. Um ein Absterben auf halbem Weg zu vermeiden, sind verschiedene kleine Kapseln erhältlich. Cthulhu kann wählen
 Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Langsame Internetgeschwindigkeiten für Mobilfunkdaten auf dem iPhone: Korrekturen
May 03, 2024 pm 09:01 PM
Stehen Sie vor einer Verzögerung oder einer langsamen mobilen Datenverbindung auf dem iPhone? Normalerweise hängt die Stärke des Mobilfunk-Internets auf Ihrem Telefon von mehreren Faktoren ab, wie z. B. der Region, dem Mobilfunknetztyp, dem Roaming-Typ usw. Es gibt einige Dinge, die Sie tun können, um eine schnellere und zuverlässigere Mobilfunk-Internetverbindung zu erhalten. Fix 1 – Neustart des iPhone erzwingen Manchmal werden durch einen erzwungenen Neustart Ihres Geräts viele Dinge zurückgesetzt, einschließlich der Mobilfunkverbindung. Schritt 1 – Drücken Sie einfach einmal die Lauter-Taste und lassen Sie sie los. Drücken Sie anschließend die Leiser-Taste und lassen Sie sie wieder los. Schritt 2 – Der nächste Teil des Prozesses besteht darin, die Taste auf der rechten Seite gedrückt zu halten. Lassen Sie das iPhone den Neustart abschließen. Aktivieren Sie Mobilfunkdaten und überprüfen Sie die Netzwerkgeschwindigkeit. Überprüfen Sie es erneut. Fix 2 – Datenmodus ändern 5G bietet zwar bessere Netzwerkgeschwindigkeiten, funktioniert jedoch besser, wenn das Signal schwächer ist
 Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Die U.S. Air Force präsentiert ihren ersten KI-Kampfjet mit großem Aufsehen! Der Minister führte die Testfahrt persönlich durch, ohne in den gesamten Prozess einzugreifen, und 100.000 Codezeilen wurden 21 Mal getestet.
May 07, 2024 pm 05:00 PM
Kürzlich wurde die Militärwelt von der Nachricht überwältigt: US-Militärkampfflugzeuge können jetzt mithilfe von KI vollautomatische Luftkämpfe absolvieren. Ja, erst kürzlich wurde der KI-Kampfjet des US-Militärs zum ersten Mal der Öffentlichkeit zugänglich gemacht und sein Geheimnis gelüftet. Der vollständige Name dieses Jägers lautet „Variable Stability Simulator Test Aircraft“ (VISTA). Er wurde vom Minister der US-Luftwaffe persönlich geflogen, um einen Eins-gegen-eins-Luftkampf zu simulieren. Am 2. Mai startete US-Luftwaffenminister Frank Kendall mit einer X-62AVISTA auf der Edwards Air Force Base. Beachten Sie, dass während des einstündigen Fluges alle Flugaktionen autonom von der KI durchgeführt wurden! Kendall sagte: „In den letzten Jahrzehnten haben wir über das unbegrenzte Potenzial des autonomen Luft-Luft-Kampfes nachgedacht, aber es schien immer unerreichbar.“ Nun jedoch,
