
 Technologie-Peripheriegeräte
KI
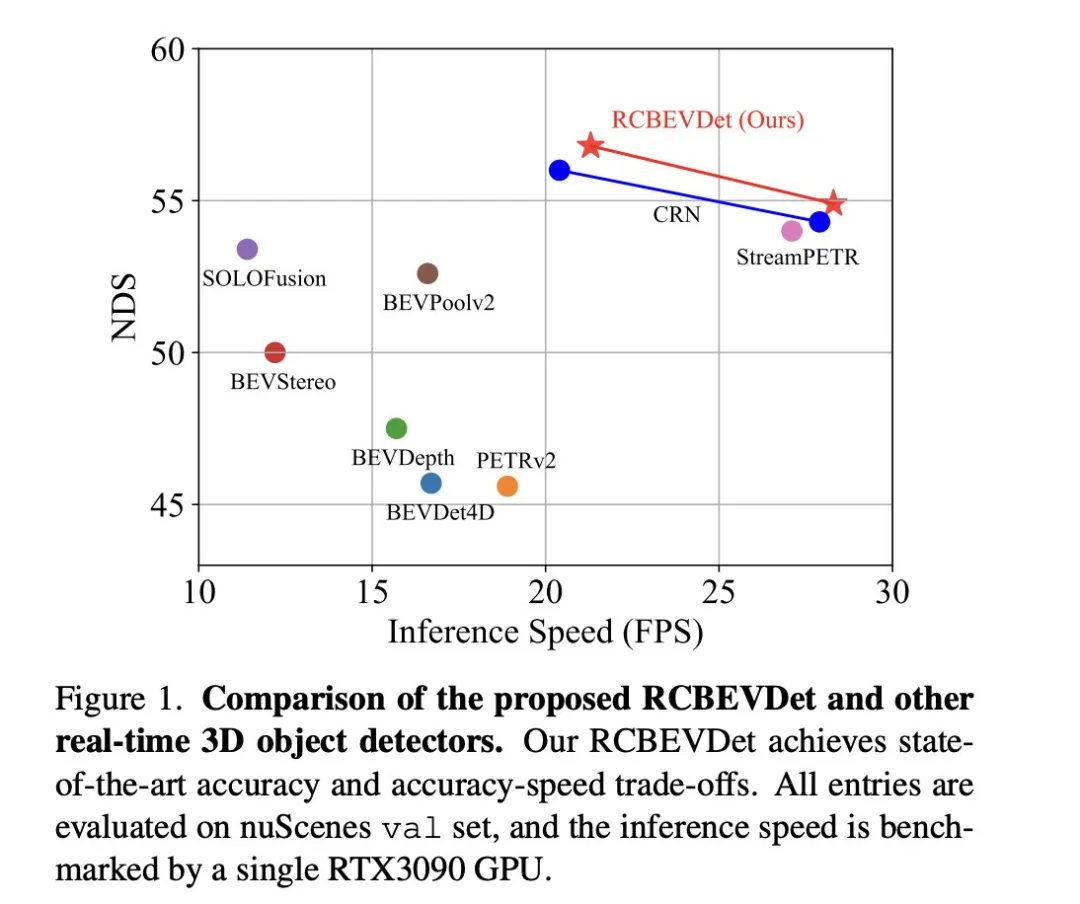
Die Leistung der RV-Fusion ist erstaunlich! RCBEVDet: Radar hat auch Frühling, das neueste SOTA!
Technologie-Peripheriegeräte
KI
Die Leistung der RV-Fusion ist erstaunlich! RCBEVDet: Radar hat auch Frühling, das neueste SOTA!
Die Leistung der RV-Fusion ist erstaunlich! RCBEVDet: Radar hat auch Frühling, das neueste SOTA!

Vorher geschrieben und persönliches Verständnis des Autors
Das Hauptthema, auf das sich dieses Diskussionspapier konzentriert, ist die Anwendung der 3D-Zielerkennungstechnologie im Prozess des autonomen Fahrens. Obwohl die Entwicklung der Umgebungskameratechnologie hochauflösende semantische Informationen für die 3D-Objekterkennung liefert, ist diese Methode durch Probleme wie die Unfähigkeit, Tiefeninformationen genau zu erfassen, und schlechte Leistung bei schlechtem Wetter oder schlechten Lichtverhältnissen eingeschränkt. Als Reaktion auf dieses Problem wurde in der Diskussion eine neue Multimode-3D-Zielerkennungsmethode RCBEVDet vorgeschlagen, die Rundumsichtkameras und kostengünstige Millimeterwellenradarsensoren kombiniert. Diese Methode bietet umfangreichere semantische Informationen und eine Lösung für Probleme wie schlechte Leistung bei schlechtem Wetter oder schlechten Lichtverhältnissen, indem sie Informationen von mehreren Sensoren umfassend nutzt. Als Reaktion auf dieses Problem wurde in der Diskussion eine neue Multimode-3D-Zielerkennungsmethode RCBEVDet vorgeschlagen, die Rundumsichtkameras und kostengünstige Millimeterwellenradarsensoren kombiniert. Durch die umfassende Nutzung von Informationen von Multimode-Sensoren ist RCBEVDet in der Lage, hochauflösende semantische Informationen bereitzustellen und eine gute Leistung bei schlechtem Wetter oder schlechten Lichtverhältnissen zu zeigen. Der Kern dieser Methode zur Verbesserung des automatischen
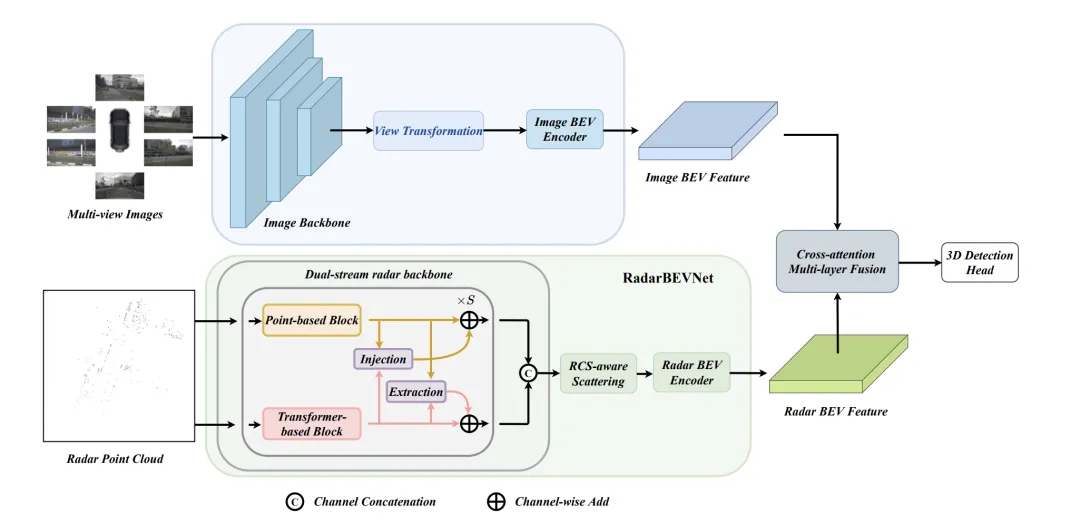
RCBEVDet liegt in zwei Schlüsseldesigns: RadarBEVNet und Cross-Attention+Multi-Layer Fusion Module (CAMF). RadarBEVNet wurde für die effiziente Extraktion von Radarfunktionen entwickelt und umfasst einen Dual-Stream-Radar-Backbone-Netzwerk-RCS-Encoder (Radar Cross Section), der BEV-Encoder (Bird's Eye View) erkennt. Ein solches Design verwendet punktwolkenbasierte und transformatorbasierte Encoder, um Radarpunkte zu verarbeiten, Radarpunktmerkmale interaktiv zu aktualisieren und Radar-spezifische RCS-Eigenschaften als vorherige Informationen über die Zielgröße zu verwenden, um die Punktmerkmalsverteilung im BEV-Raum zu optimieren. Das CAMF-Modul löst das Azimutfehlerproblem von Radarpunkten durch einen multimodalen Kreuzaufmerksamkeitsmechanismus und erreicht eine dynamische Ausrichtung von BEV-Feature-Maps von Radar und Kameras sowie eine adaptive Fusion multimodaler Features durch Kanal- und räumliche Fusion. In der Implementierung wird die Punktmerkmalsverteilung im BEV-Raum optimiert, indem die Radarpunktmerkmale interaktiv aktualisiert werden und die Radar-spezifischen RCS-Eigenschaften als vorherige Informationen über die Zielgröße verwendet werden. Das CAMF-Modul löst das Azimutfehlerproblem von Radarpunkten durch einen multimodalen Kreuzaufmerksamkeitsmechanismus und erreicht eine dynamische Ausrichtung von BEV-Feature-Maps von Radar und Kameras sowie eine adaptive Fusion multimodaler Features durch Kanal- und räumliche Fusion.
Die im Artikel vorgeschlagene neue Methode löst die bestehenden Probleme durch die folgenden Punkte:
- Effizienter Radar-Feature-Extraktor: BEV-Encoder-Design durch Dual-Stream-Radar-Backbone und RCS-Erkennung, speziell für Radar Die Daten werden optimiert, um die Mängel bei der Verwendung von für Lidar entwickelten Encodern zur Verarbeitung von Radardaten zu beheben.
- Leistungsfähiges Radarkamera-Funktionsfusionsmodul: Mithilfe eines deformierten Kreuzaufmerksamkeitsmechanismus wird das Problem der räumlichen Fehlausrichtung zwischen dem Umgebungsbild und dem Radareingang effektiv gelöst und der Fusionseffekt verbessert.
Die Hauptbeiträge des Papiers sind wie folgt:
- Schägt einen neuartigen multimodalen 3D-Zieldetektor mit Radarkamera RCBEVDet vor, der eine hochpräzise, hocheffiziente und starke Robustheit der 3D-Zielerkennung erreicht.
- Entwickelte RadarBEVNet, einen effizienten Feature-Extraktor für Radardaten, der die Effizienz und Genauigkeit der Feature-Extraktion durch Dual-Stream-Radar-Backbone und RCS-fähigen BEV-Encoder verbessert.
- Das Cross-Attention Multi-Layer Fusion-Modul wird eingeführt, um durch den deformierten Cross-Attention-Mechanismus eine präzise Ausrichtung und effiziente Fusion von Radar- und Kamerafunktionen zu erreichen.
- Erzielte eine neue, hochmoderne Leistung für die multimodale 3D-Objekterkennung von Radarkameras in nuScenes- und VoD-Datensätzen, während gleichzeitig das beste Gleichgewicht zwischen Genauigkeit und Geschwindigkeit erreicht wurde und eine gute Leistung bei Sensorausfallszenarien und Robustheit nachgewiesen wurde.
Detaillierte Erklärung von RCBEVDet
RadarBEVNet
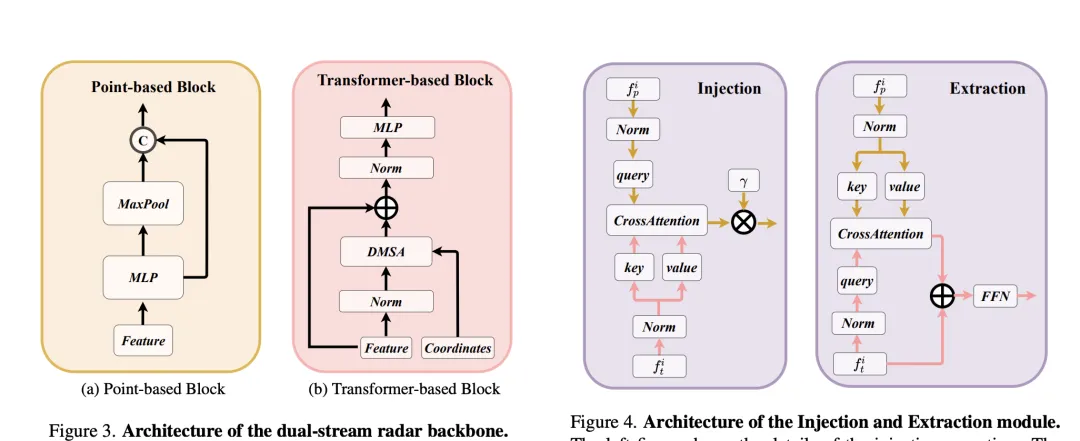
RadarBEVNet ist eine in diesem Dokument vorgeschlagene Netzwerkarchitektur für die effektive Extraktion von BEV-Funktionen (Vogelansicht). Sie umfasst hauptsächlich zwei Kernkomponenten: Dual-Stream Radar-Backbone-Netzwerk und RCS (Radar Cross Section) fähiger BEV-Encoder. Ein Dual-Stream-Radar-Backbone-Netzwerk wird verwendet, um umfangreiche Merkmalsdarstellungen aus Mehrkanal-Radardaten zu extrahieren. Es basiert auf einem Deep Convolutional Neural Network (CNN), das zwischen verschachtelten Faltungs- und Pooling-Schichten für Merkmalsextraktions- und Dimensionsreduktionsoperationen wechselt, um schrittweise das Dual-Stream-Radar-Backbone zu erhalten. Das Backbone-Netzwerk besteht aus punktbasierten Backbones und Konvertern -basierte Rückgrate. Das punktbasierte Backbone-Netzwerk lernt Radarmerkmale durch Multi-Layer-Perceptron (MLP) und Maximum-Pooling-Operationen. Der Prozess kann auf die folgende Formel vereinfacht werden:
stellt hier die Radarpunktmerkmale dar. Nach der Erhöhung der Merkmalsdimension durch MLP Maximum Der Pooling-Vorgang extrahiert globale Informationen und verkettet sie mit hochdimensionalen Merkmalen. Der Konverter führt den abstandsmodulierten Aufmerksamkeitsmechanismus (DMSA) basierend auf dem Interferenzblock ein. Durch die Berücksichtigung der Abstandsinformationen zwischen Radarpunkten optimiert er die Fähigkeit des Modells, benachbarte Informationen zu sammeln, und fördert die Konvergenz des Modells. Die Selbstaufmerksamkeit des DMSA-Mechanismus kann ausgedrückt werden als:
RCS-fähiger BEV-Encoder
Um das durch herkömmliche Radar-BEV-Encoder verursachte BEV-Feature-Sparsity-Problem zu lösen, wird ein RCS-fähiger BEV-Encoder vorgeschlagen. Es nutzt RCS als vorherige Information über die Zielgröße und verteilt Radarpunktmerkmale auf mehrere Pixel im BEV-Raum statt auf ein einzelnes Pixel, um die Dichte der BEV-Merkmale zu erhöhen. Dieser Prozess wird durch die folgende Formel implementiert:
Wobei ist die auf RCS basierende Gaußsche BEV-Gewichtskarte, die durch Maximierung der Gewichtungskarte aller Radarpunkte optimiert wird. Schließlich werden die durch RCS-Spreizung erhaltenen Merkmale von MLP verbunden und verarbeitet, um die endgültigen RCS-fähigen BEV-Merkmale zu erhalten.
Insgesamt extrahiert RadarBEVNet die Merkmale von Radardaten effizient durch die Kombination des Dual-Stream-Radar-Backbone-Netzwerks und des RCS-fähigen BEV-Encoders und verwendet RCS als a priori der Zielgröße, um die Merkmalsverteilung des BEV-Raums zu optimieren Eine Grundlage für die anschließende multimodale Fusion bietet ein starkes Fundament.
Cross-Attention Multi-layer Fusion Module
Cross-Attention Multi-layer Fusion Module (CAMF) ist eine fortschrittliche Netzwerkstruktur für die dynamische Ausrichtung und Fusion multimodaler Features, insbesondere für Radar und dynamische Ausrichtung und Fusionsdesign von kameragenerierten Bird's Eye View (BEV)-Funktionen. Dieses Modul löst hauptsächlich das Problem der Merkmalsfehlausrichtung, die durch den Azimutfehler von Radarpunktwolken verursacht wird. Durch den verformbaren Kreuzaufmerksamkeitsmechanismus (Deformable Cross-Attention) werden kleine Abweichungen von Radarpunkten effektiv erfasst und die Standardkreuzaufmerksamkeit reduziert. Rechenkomplexität.
CAMF nutzt einen deformierten Kreuzaufmerksamkeitsmechanismus, um die BEV-Funktionen von Kameras und Radargeräten auszurichten. Bei einer Summe von BEV-Funktionen für eine Kamera und ein Radar werden zunächst lernbare Positionseinbettungen zur Summe addiert und dann als Schlüssel und Werte in Abfrage- und Referenzpunkte umgewandelt. Die Berechnung der Queraufmerksamkeit durch Mehrkopfverformung kann wie folgt ausgedrückt werden:
wobei der Index des Aufmerksamkeitskopfes, der Index des Abtastschlüssels und die Gesamtzahl der Abtastschlüssel angegeben sind. stellt den Sampling-Offset dar und ist das von und berechnete Aufmerksamkeitsgewicht.
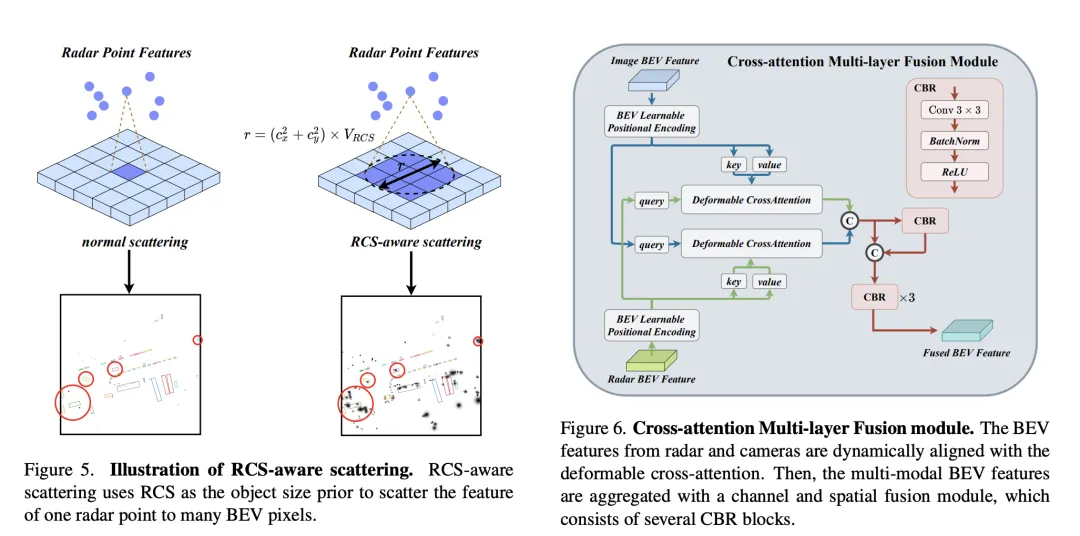
Nachdem CAMF die BEV-Funktionen von Kamera und Radar durch Kreuzaufmerksamkeit ausgerichtet hat, verwendet CAMF Kanal- und räumliche Fusionsschichten, um multimodale BEV-Funktionen zu aggregieren. Insbesondere werden zwei BEV-Merkmale zunächst verkettet und dann in den CBR-Block (Faltungs-Batch-Normalisierungs-Aktivierungsfunktion) eingespeist, und die fusionierten Merkmale werden durch Restverbindung erhalten. Der CBR-Block besteht nacheinander aus einer Faltungsschicht, einer Batch-Normalisierungsschicht und einer ReLU-Aktivierungsfunktion. Danach werden drei CBR-Blöcke nacheinander angewendet, um multimodale Merkmale weiter zu verschmelzen.
Durch den oben genannten Prozess erreicht CAMF effektiv eine präzise Ausrichtung und effiziente Fusion von Radar- und Kamera-BEV-Funktionen, stellt umfangreiche und genaue Funktionsinformationen für die 3D-Zielerkennung bereit und verbessert so die Erkennungsleistung.
Verwandte Experimente
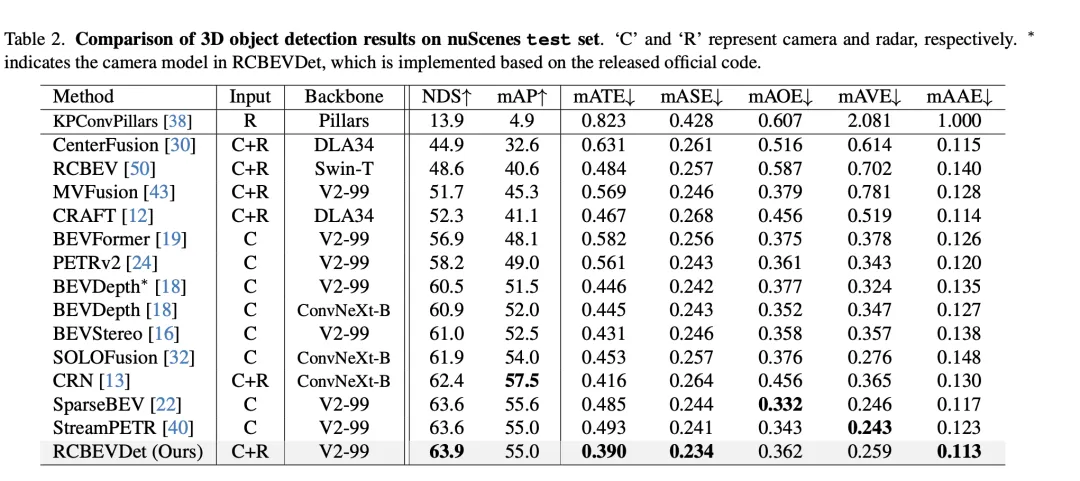
Beim Vergleich der 3D-Zielerkennungsergebnisse im VoD-Validierungssatz erreichte RadarBEVNet durch die Fusion von Kamera und durchschnittlicher Genauigkeit (mAP) sowohl im gesamten Annotationsbereich als auch im interessierenden Bereich Radardaten zeigten eine hervorragende Leistung. Insbesondere für den gesamten kommentierten Bereich erreichte RadarBEVNet AP-Werte von 40,63 %, 38,86 % bzw. 70,48 % bei der Erkennung von Autos, Fußgängern und Radfahrern, wodurch sich der umfassende mAP auf 49,99 % erhöhte. Im interessierenden Bereich, also im fahrzeugnahen Fahrkanal, ist die Leistung von RadarBEVNet noch herausragender und erreicht AP-Werte von 72,48 %, 49,89 % und 87,01 % bei der Erkennung von Autos, Fußgängern usw Radfahrer und die umfassende Karte erreichte 69,80 %.
Diese Ergebnisse offenbaren mehrere wichtige Punkte. Erstens ist RadarBEVNet durch die effektive Zusammenführung von Kamera- und Radareingängen in der Lage, die komplementären Vorteile der beiden Sensoren voll auszunutzen und die Gesamterkennungsleistung zu verbessern. Im Vergleich zu Methoden, die nur Radar verwenden, wie PointPillar und RadarPillarNet, weist RadarBEVNet eine deutliche Verbesserung des umfassenden mAP auf, was zeigt, dass die multimodale Fusion besonders wichtig ist, um die Erkennungsgenauigkeit zu verbessern. Zweitens schneidet RadarBEVNet in Interessensgebieten besonders gut ab, was für autonome Fahranwendungen besonders wichtig ist, da Ziele in Interessensgebieten normalerweise den größten Einfluss auf Fahrentscheidungen in Echtzeit haben. Obwohl der AP-Wert von RadarBEVNet bei der Erkennung von Autos und Fußgängern etwas niedriger ist als bei einigen monomodalen oder anderen multimodalen Methoden, zeigt RadarBEVNet seine Gesamtleistungsvorteile bei der Radfahrererkennung und der umfassenden mAP-Leistung. RadarBEVNet erzielt eine hervorragende Leistung im VoD-Verifizierungssatz durch die Zusammenführung multimodaler Daten von Kameras und Radargeräten und demonstriert insbesondere starke Erkennungsfähigkeiten in Interessenbereichen, die für das autonome Fahren von entscheidender Bedeutung sind, und beweist damit seine Wirksamkeit als Potenzial von 3D-Objekterkennungsmethoden.
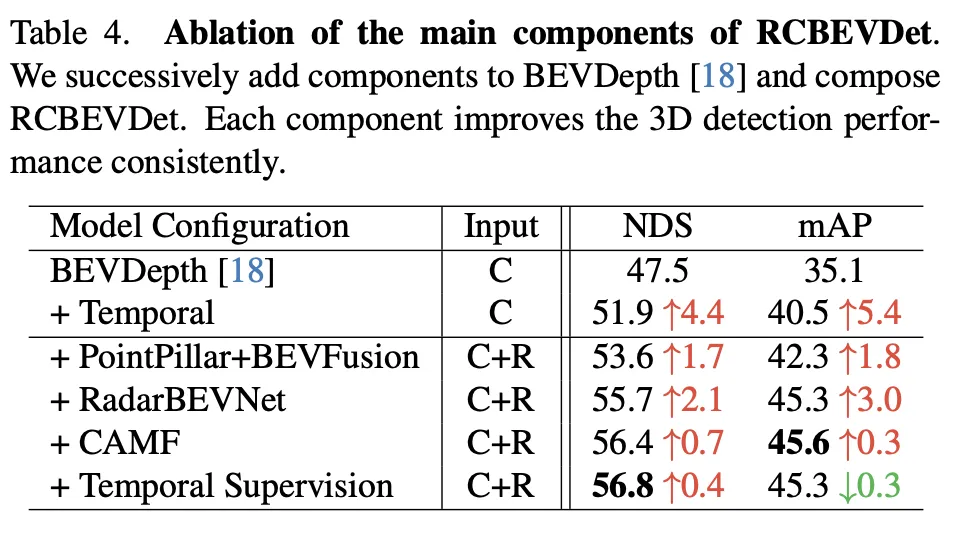
Dieses Ablationsexperiment zeigt die kontinuierliche Verbesserung der 3D-Objekterkennungsleistung von RadarBEVNet durch das schrittweise Hinzufügen wichtiger Komponenten. Ausgehend vom Basismodell BEVDepth verbessern die bei jedem Schritt hinzugefügten Komponenten NDS (Kernmetrik, die die Erkennungsgenauigkeit und -vollständigkeit widerspiegelt) und mAP (durchschnittliche Präzision, die die Fähigkeit des Modells zur Objekterkennung widerspiegelt) erheblich.
- Zeitinformationen hinzufügen: Durch die Einführung von Zeitinformationen werden NDS und mAP um 4,4 bzw. 5,4 Prozentpunkte verbessert. Dies zeigt, dass zeitliche Informationen die Genauigkeit und Robustheit der 3D-Objekterkennung sehr effektiv verbessern, wahrscheinlich weil die zeitliche Dimension zusätzliche dynamische Informationen liefert, die dem Modell helfen, die dynamischen Eigenschaften der Szene und der Objekte besser zu verstehen.
- PointPillar+BEVFusion hinzufügen (basierend auf der Fusion von Radar und Kamera): Dieser Schritt verbessert NDS und mAP weiter und erhöht sich um 1,7 bzw. 1,8 Prozentpunkte. Dies zeigt, dass das Modell durch die Zusammenführung von Radar- und Kameradaten ein umfassenderes Szenenverständnis erlangen und so die Einschränkungen einzelner modaler Daten ausgleichen kann.
- Wir stellen vor: RadarBEVNet: NDS und mAP stiegen erneut um 2,1 bzw. 3,0 Prozentpunkte. Als effizienter Radar-Feature-Extraktor optimiert RadarBEVNet die Verarbeitung von Radardaten und verbessert die Qualität und Effektivität von Features, was für die Verbesserung der gesamten Erkennungsleistung von entscheidender Bedeutung ist.
- CAMF (Cross Attention Multi-Layer Fusion Module) hinzufügen: Durch feine Feature-Ausrichtung und Fusion wird NDS um 0,7 Prozentpunkte erhöht und mAP wird leicht auf 45,6 verbessert, was Wirksamkeit bei der Feature-Fusion zeigt. Obwohl die Verbesserung in diesem Schritt nicht so bedeutend ist wie in den vorherigen Schritten, beweist sie dennoch, wie wichtig eine genaue Merkmalsausrichtung für die Verbesserung der Erkennungsleistung während des multimodalen Fusionsprozesses ist.
- Zeitaufsicht hinzufügen: Schließlich stieg der NDS nach Einführung der Zeitaufsicht leicht um 0,4 Prozentpunkte auf 56,8, während mAP leicht um 0,3 Prozentpunkte auf 45,3 sank. Dies zeigt, dass die zeitliche Überwachung die Leistung des Modells in der zeitlichen Dimension weiter verbessern kann, obwohl der Beitrag zum mAP durch die Auswirkungen spezifischer experimenteller Einstellungen oder Datenverteilung leicht eingeschränkt sein kann.
Insgesamt zeigt diese Reihe von Ablationsexperimenten deutlich den Beitrag jeder Hauptkomponente in RadarBEVNet zur Verbesserung der 3D-Objekterkennungsleistung, von der Einführung zeitlicher Informationen bis hin zur komplexen multimodalen Fusionsstrategie, jeder Schritt bringt Leistungsverbesserungen mit sich Modell. Insbesondere die ausgefeilten Verarbeitungs- und Fusionsstrategien für Radar- und Kameradaten belegen die Bedeutung der multimodalen Datenverarbeitung in komplexen autonomen Fahrumgebungen.
Diskussion
Die im Artikel vorgeschlagene RadarBEVNet-Methode verbessert effektiv die Genauigkeit und Robustheit der 3D-Zielerkennung durch die Zusammenführung multimodaler Daten von Kameras und Radargeräten, insbesondere in komplexen autonomen Fahrszenarien. Durch die Einführung von RadarBEVNet und dem Cross-Attention Multi-Layer Fusion Module (CAMF) optimiert RadarBEVNet nicht nur den Merkmalsextraktionsprozess von Radardaten, sondern erreicht auch eine präzise Merkmalsausrichtung und Fusion zwischen Radar- und Kameradaten und überwindet so das Problem der Verwendung eines einzigen Einschränkungen der Sensordaten, wie Radarpeilungsfehler und Verschlechterung der Kameraleistung bei schlechten Lichtverhältnissen oder widrigen Wetterbedingungen.
In Bezug auf die Vorteile besteht der Hauptbeitrag von RadarBEVNet in seiner Fähigkeit, komplementäre Informationen zwischen multimodalen Daten effektiv zu verarbeiten und zu nutzen und so die Erkennungsgenauigkeit und Systemrobustheit zu verbessern. Durch die Einführung von RadarBEVNet wird die Verarbeitung von Radardaten effizienter, und das CAMF-Modul sorgt für eine effektive Fusion unterschiedlicher Sensordaten und gleicht so deren jeweilige Defizite aus. Darüber hinaus zeigte RadarBEVNet in Experimenten eine hervorragende Leistung bei mehreren Datensätzen, insbesondere in Interessenbereichen, die für das autonome Fahren von entscheidender Bedeutung sind, und zeigte sein Potenzial in praktischen Anwendungsszenarien.
In Bezug auf die Mängel hat RadarBEVNet zwar bemerkenswerte Ergebnisse im Bereich der multimodalen 3D-Zielerkennung erzielt, aber auch die Komplexität seiner Implementierung hat entsprechend zugenommen und erfordert möglicherweise mehr Rechenressourcen und Verarbeitungszeit, was seine Verwendung auf ein bestimmtes Maß beschränkt Umfang. Einsatz in Echtzeit-Anwendungsszenarien. Obwohl RadarBEVNet bei der Erkennung von Radfahrern und der Gesamtleistung eine gute Leistung erbringt, besteht bei bestimmten Kategorien (z. B. Autos und Fußgänger) noch Raum für Leistungsverbesserungen, für deren Lösung möglicherweise eine weitere Algorithmusoptimierung oder effizientere Feature-Fusion-Strategien erforderlich sind.
Zusammenfassend hat RadarBEVNet durch seine innovative multimodale Fusionsstrategie erhebliche Leistungsvorteile im Bereich der 3D-Objekterkennung gezeigt. Obwohl es einige Einschränkungen gibt, wie z. B. eine höhere Rechenkomplexität und Raum für Leistungsverbesserungen bei bestimmten Erkennungskategorien, kann das Potenzial zur Verbesserung der Genauigkeit und Robustheit autonomer Fahrsysteme nicht ignoriert werden. Zukünftige Arbeiten können sich auf die Optimierung der Recheneffizienz des Algorithmus und die weitere Verbesserung seiner Leistung bei verschiedenen Zielerkennungen konzentrieren, um den weit verbreiteten Einsatz von RadarBEVNet in tatsächlichen autonomen Fahranwendungen zu fördern.
Fazit
Der Artikel stellt RadarBEVNet und Cross-Attention Multi-Layer Fusion Module (CAMF) durch die Zusammenführung von Kamera- und Radardaten vor und zeigt deutliche Leistungsverbesserungen im Bereich der 3D-Zielerkennung, insbesondere im Schlüssel zum autonomen Fahren. Hervorragende Leistung in der Szene. Es nutzt effektiv die komplementären Informationen zwischen multimodalen Daten, um die Erkennungsgenauigkeit und Systemrobustheit zu verbessern. Trotz der Herausforderungen hoher Rechenkomplexität und Raum für Leistungsverbesserungen in einigen Kategorien haben wir großes Potenzial und Wert bei der Förderung der Entwicklung autonomer Fahrtechnologien gezeigt, insbesondere bei der Verbesserung der Wahrnehmungsfähigkeiten autonomer Fahrsysteme. Zukünftige Arbeiten können sich auf die Optimierung der Algorithmuseffizienz und die weitere Verbesserung der Erkennungsleistung konzentrieren, um eine bessere Anpassung an die Anforderungen von Echtzeitanwendungen für autonomes Fahren zu ermöglichen.
Das obige ist der detaillierte Inhalt vonDie Leistung der RV-Fusion ist erstaunlich! RCBEVDet: Radar hat auch Frühling, das neueste SOTA!. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Warum ist Gaussian Splatting beim autonomen Fahren so beliebt, dass NeRF allmählich aufgegeben wird?
Jan 17, 2024 pm 02:57 PM
Oben geschrieben und persönliches Verständnis des Autors. Dreidimensionales Gaussplatting (3DGS) ist eine transformative Technologie, die in den letzten Jahren in den Bereichen explizite Strahlungsfelder und Computergrafik entstanden ist. Diese innovative Methode zeichnet sich durch die Verwendung von Millionen von 3D-Gaußkurven aus, was sich stark von der Neural Radiation Field (NeRF)-Methode unterscheidet, die hauptsächlich ein implizites koordinatenbasiertes Modell verwendet, um räumliche Koordinaten auf Pixelwerte abzubilden. Mit seiner expliziten Szenendarstellung und differenzierbaren Rendering-Algorithmen garantiert 3DGS nicht nur Echtzeit-Rendering-Fähigkeiten, sondern führt auch ein beispielloses Maß an Kontrolle und Szenenbearbeitung ein. Dies positioniert 3DGS als potenziellen Game-Changer für die 3D-Rekonstruktion und -Darstellung der nächsten Generation. Zu diesem Zweck geben wir erstmals einen systematischen Überblick über die neuesten Entwicklungen und Anliegen im Bereich 3DGS.
 Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Jun 02, 2024 pm 02:44 PM
Gestern wurde ich während des Interviews gefragt, ob ich irgendwelche Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben. Das Long-Tail-Problem des autonomen Fahrens bezieht sich auf Randfälle bei autonomen Fahrzeugen, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten. Der „Long Tail“ von Randszenarien beim autonomen Fahren bezieht sich auf Randfälle in autonomen Fahrzeugen (AVs). Randfälle sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. diese seltenen Ereignisse
 Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
Kamera oder Lidar wählen? Eine aktuelle Übersicht über die Erzielung einer robusten 3D-Objekterkennung
Jan 26, 2024 am 11:18 AM
0. Vorab geschrieben&& Persönliches Verständnis, dass autonome Fahrsysteme auf fortschrittlichen Wahrnehmungs-, Entscheidungs- und Steuerungstechnologien beruhen, indem sie verschiedene Sensoren (wie Kameras, Lidar, Radar usw.) verwenden, um die Umgebung wahrzunehmen, und Algorithmen und Modelle verwenden für Echtzeitanalysen und Entscheidungsfindung. Dies ermöglicht es Fahrzeugen, Verkehrszeichen zu erkennen, andere Fahrzeuge zu erkennen und zu verfolgen, das Verhalten von Fußgängern vorherzusagen usw. und sich so sicher an komplexe Verkehrsumgebungen anzupassen. Diese Technologie erregt derzeit große Aufmerksamkeit und gilt als wichtiger Entwicklungsbereich für die Zukunft des Transportwesens . eins. Aber was autonomes Fahren schwierig macht, ist herauszufinden, wie man dem Auto klarmachen kann, was um es herum passiert. Dies erfordert, dass der dreidimensionale Objekterkennungsalgorithmus im autonomen Fahrsystem Objekte in der Umgebung, einschließlich ihrer Standorte, genau wahrnehmen und beschreiben kann.
 Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Beherrschen Sie die Koordinatensystemkonvertierung wirklich? Multisensorik-Themen, die für das autonome Fahren unverzichtbar sind
Oct 12, 2023 am 11:21 AM
Der erste Pilot- und Schlüsselartikel stellt hauptsächlich mehrere häufig verwendete Koordinatensysteme in der autonomen Fahrtechnologie vor und erläutert, wie die Korrelation und Konvertierung zwischen ihnen abgeschlossen und schließlich ein einheitliches Umgebungsmodell erstellt werden kann. Der Schwerpunkt liegt hier auf dem Verständnis der Umrechnung vom Fahrzeug in den starren Kamerakörper (externe Parameter), der Kamera-in-Bild-Konvertierung (interne Parameter) und der Bild-in-Pixel-Einheitenkonvertierung. Die Konvertierung von 3D in 2D führt zu entsprechenden Verzerrungen, Verschiebungen usw. Wichtige Punkte: Das Fahrzeugkoordinatensystem und das Kamerakörperkoordinatensystem müssen neu geschrieben werden: Das Ebenenkoordinatensystem und das Pixelkoordinatensystem. Schwierigkeit: Sowohl die Entzerrung als auch die Verzerrungsaddition müssen auf der Bildebene kompensiert werden. 2. Einführung Insgesamt gibt es vier visuelle Systeme Koordinatensystem: Pixelebenenkoordinatensystem (u, v), Bildkoordinatensystem (x, y), Kamerakoordinatensystem () und Weltkoordinatensystem (). Es gibt eine Beziehung zwischen jedem Koordinatensystem,
 Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Dieser Artikel reicht aus, um etwas über autonomes Fahren und Flugbahnvorhersage zu lesen!
Feb 28, 2024 pm 07:20 PM
Die Trajektorienvorhersage spielt eine wichtige Rolle beim autonomen Fahren. Unter autonomer Fahrtrajektorienvorhersage versteht man die Vorhersage der zukünftigen Fahrtrajektorie des Fahrzeugs durch die Analyse verschiedener Daten während des Fahrvorgangs. Als Kernmodul des autonomen Fahrens ist die Qualität der Trajektorienvorhersage von entscheidender Bedeutung für die nachgelagerte Planungssteuerung. Die Trajektorienvorhersageaufgabe verfügt über einen umfangreichen Technologie-Stack und erfordert Vertrautheit mit der dynamischen/statischen Wahrnehmung des autonomen Fahrens, hochpräzisen Karten, Fahrspurlinien, Fähigkeiten in der neuronalen Netzwerkarchitektur (CNN&GNN&Transformer) usw. Der Einstieg ist sehr schwierig! Viele Fans hoffen, so schnell wie möglich mit der Flugbahnvorhersage beginnen zu können und Fallstricke zu vermeiden. Heute werde ich eine Bestandsaufnahme einiger häufiger Probleme und einführender Lernmethoden für die Flugbahnvorhersage machen! Einführungsbezogenes Wissen 1. Sind die Vorschaupapiere in Ordnung? A: Schauen Sie sich zuerst die Umfrage an, S
 SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
SIMPL: Ein einfacher und effizienter Multi-Agent-Benchmark zur Bewegungsvorhersage für autonomes Fahren
Feb 20, 2024 am 11:48 AM
Originaltitel: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper-Link: https://arxiv.org/pdf/2402.02519.pdf Code-Link: https://github.com/HKUST-Aerial-Robotics/SIMPL Autor: Hong Kong University of Science und Technologie DJI-Papieridee: Dieses Papier schlägt eine einfache und effiziente Bewegungsvorhersagebasislinie (SIMPL) für autonome Fahrzeuge vor. Im Vergleich zum herkömmlichen Agent-Cent
 nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
nuScenes' neuestes SOTA |. SparseAD: Sparse-Abfrage hilft effizientes durchgängiges autonomes Fahren!
Apr 17, 2024 pm 06:22 PM
Vorab geschrieben und Ausgangspunkt Das End-to-End-Paradigma verwendet ein einheitliches Framework, um Multitasking in autonomen Fahrsystemen zu erreichen. Trotz der Einfachheit und Klarheit dieses Paradigmas bleibt die Leistung von End-to-End-Methoden für das autonome Fahren bei Teilaufgaben immer noch weit hinter Methoden für einzelne Aufgaben zurück. Gleichzeitig erschweren die in früheren End-to-End-Methoden weit verbreiteten Funktionen der dichten Vogelperspektive (BEV) die Skalierung auf mehr Modalitäten oder Aufgaben. Hier wird ein Sparse-Search-zentriertes End-to-End-Paradigma für autonomes Fahren (SparseAD) vorgeschlagen, bei dem die Sparse-Suche das gesamte Fahrszenario, einschließlich Raum, Zeit und Aufgaben, ohne dichte BEV-Darstellung vollständig abbildet. Insbesondere ist eine einheitliche, spärliche Architektur für die Aufgabenerkennung einschließlich Erkennung, Verfolgung und Online-Zuordnung konzipiert. Zudem schwer
 Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Sprechen wir über End-to-End- und autonome Fahrsysteme der nächsten Generation sowie über einige Missverständnisse über End-to-End-Autonomes Fahren?
Apr 15, 2024 pm 04:13 PM
Im vergangenen Monat hatte ich aus bekannten Gründen einen sehr intensiven Austausch mit verschiedenen Lehrern und Mitschülern der Branche. Ein unvermeidliches Thema im Austausch ist natürlich End-to-End und der beliebte Tesla FSDV12. Ich möchte diese Gelegenheit nutzen, einige meiner aktuellen Gedanken und Meinungen als Referenz und Diskussion darzulegen. Wie definiert man ein durchgängiges autonomes Fahrsystem und welche Probleme sollten voraussichtlich durchgängig gelöst werden? Gemäß der traditionellsten Definition bezieht sich ein End-to-End-System auf ein System, das Rohinformationen von Sensoren eingibt und für die Aufgabe relevante Variablen direkt ausgibt. Bei der Bilderkennung kann CNN beispielsweise als End-to-End bezeichnet werden, verglichen mit der herkömmlichen Methode zum Extrahieren von Merkmalen + Klassifizieren. Bei autonomen Fahraufgaben werden Eingabedaten verschiedener Sensoren (Kamera/LiDAR) benötigt
