
 Technologie-Peripheriegeräte
KI
Jenseits von BEVFormer! CR3DT: RV-Fusion hilft bei der 3D-Erkennung und -Verfolgung neuer SOTA (ETH)
Technologie-Peripheriegeräte
KI
Jenseits von BEVFormer! CR3DT: RV-Fusion hilft bei der 3D-Erkennung und -Verfolgung neuer SOTA (ETH)
Jenseits von BEVFormer! CR3DT: RV-Fusion hilft bei der 3D-Erkennung und -Verfolgung neuer SOTA (ETH)

Vorab geschrieben und nach persönlichem Verständnis des Autors
In diesem Artikel wird eine Kamera-Millimeterwellen-Radarfusionsmethode (CR3DT) für die 3D-Zielerkennung und die Verfolgung mehrerer Ziele vorgestellt. Die Lidar-basierte Methode hat in diesem Bereich einen hohen Standard gesetzt, ihre hohe Rechenleistung und ihre hohen Kosten haben jedoch die Entwicklung dieser Lösung im Bereich des autonomen Fahrens eingeschränkt Kosten Es ist relativ niedrig und hat die Aufmerksamkeit vieler Wissenschaftler auf sich gezogen, aber aufgrund seiner schlechten Ergebnisse. Daher wird die Fusion von Kameras und Millimeterwellenradar zu einer vielversprechenden Lösung. Unter dem bestehenden Kamera-Framework BEVDet führt der Autor die räumlichen und Geschwindigkeitsinformationen des Millimeterwellenradars zusammen und kombiniert sie mit dem CC-3DT++-Tracking-Kopf, um die Genauigkeit der 3D-Zielerkennung und -verfolgung erheblich zu verbessern und den Widerspruch zwischen Leistung und Kosten zu neutralisieren.
Hauptbeitrag
SensorfusionsarchitekturDer vorgeschlagene CR3DT nutzt die Zwischenfusionstechnologie vor und nach dem BEV-Encoder, um Millimeterwellen-Radardaten zu integrieren, während für die Verfolgung ein quasi-dichter Einbettungskopf verwendet wird, Target Korrelation unter Verwendung der Geschwindigkeitsschätzung vom Millimeterwellenradar.
Bewertung der Erkennungsleistung CR3DT erreichte 35,1 % mAP und 45,6 % nuScenes Detection Score (NDS) im nuScenes 3D-Erkennungsvalidierungssatz. Durch die Nutzung der umfangreichen Geschwindigkeitsinformationen, die in den Radardaten enthalten sind, wird der mittlere Geschwindigkeitsfehler (mAVE) des Detektors im Vergleich zu SOTA-Kameradetektoren um 45,3 % reduziert.
Bewertung der Tracking-Leistung CR3DT erreicht eine Tracking-Leistung von 38,1 % AMOTA auf dem nuScenes-Tracking-Validierungssatz, eine AMOTA-Verbesserung von 14,9 % im Vergleich zum Nur-Kamera-SOTA-Tracking-Modell, der expliziten Verwendung von Geschwindigkeitsinformationen im Tracker Durch weitere Verbesserungen wurde die Anzahl der IDS deutlich um etwa 43 % reduziert.
Modellarchitektur
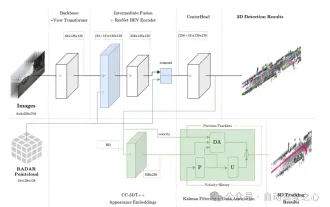
Diese Methode basiert auf dem EV-Det-Framework, fusioniert die räumlichen und Geschwindigkeitsinformationen von RADAR und wird mit dem CC-3DT++-Tracking-Kopf kombiniert, der explizit einen verbesserten Millimeterwellen-Radar-Detektor verwendet seine Datenverknüpfung, was letztendlich die 3D-Zielerkennung und -verfolgung ermöglicht.
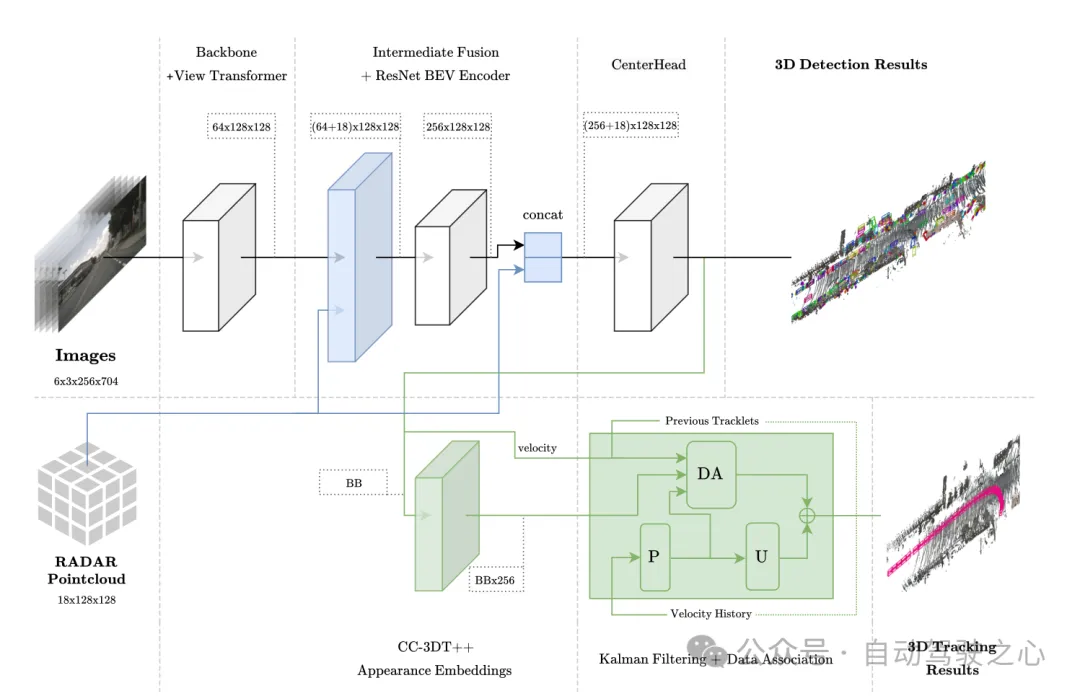 Abbildung 1 Gesamtarchitektur. Erkennung und Verfolgung werden in Hellblau bzw. Grün hervorgehoben.
Abbildung 1 Gesamtarchitektur. Erkennung und Verfolgung werden in Hellblau bzw. Grün hervorgehoben.
Sensorfusion im BEV-Raum
Dieses Modul verwendet eine Fusionsmethode ähnlich wie PointPillars, einschließlich Aggregation und Verbindung darin. Das BEV-Raster ist auf [-51,2, 51,2] mit einer Auflösung von 0,8 eingestellt, was zu einem (128×128)-Feature-Raster führt. Projizieren Sie die Bildmerkmale direkt in den BEV-Raum. Die Anzahl der Kanäle jeder Gittereinheit beträgt 64 × 128 × 128. In ähnlicher Weise werden die 18-dimensionalen Informationen von Radar in jedem In zusammengefasst Die Gittereinheit umfasst die X-, Y- und Z-Koordinaten des Punkts, und die Radardaten werden nicht verbessert. Der Autor bestätigte, dass die Radar-Punktwolke bereits mehr Informationen enthält als die LiDAR-Punktwolke, sodass die Radar-BEV-Funktion (18×128×128) beträgt. Schließlich sind die Bild-BEV-Merkmale (64 × 128 × 128) und die Radar-BEV-Merkmale (18 × 128 × 128) direkt miteinander verbunden ((64 + 18) × 128 × 128) als Eingabe der BEV-Merkmalscodierungsschicht. In nachfolgenden Ablationsexperimenten wurde festgestellt, dass es vorteilhaft ist, der Ausgabe der BEV-Merkmalskodierungsschicht Restverbindungen mit einer Dimension von (256×128×128) hinzuzufügen, was zu einer endgültigen Eingabegröße des CenterPoint-Erkennungskopfes von ( (256+18 )×128×128).

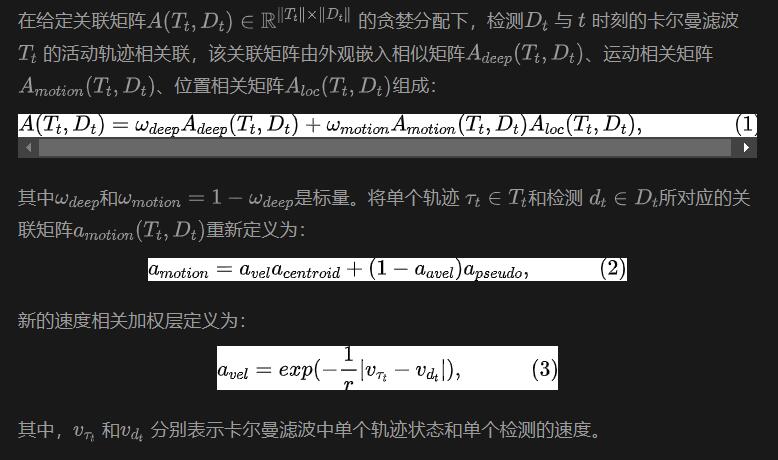
Abbildung 2 Radar-Punktwolken-Visualisierung, aggregiert im BEV-Raum für den Fusionsbetrieb. Während des Trainingsprozesses werden eindimensionale visuelle Merkmalseinbettungsvektoren durch quasi-dichtes multivariates positives Kontrastlernen erhalten, und dann werden Erkennung und Merkmalseinbettung gleichzeitig in der Verfolgungsphase von CC-3DT verwendet. Der Datenassoziationsschritt (DA-Modul in Abbildung 1) wurde geändert, um die verbesserte CR3DT-Positionserkennung und Geschwindigkeitsschätzung zu nutzen. Die Details sind wie folgt:
Experimente und Ergebnisse
 wurden auf der Grundlage des nuScenes-Datensatzes durchgeführt und bei allen Schulungen wurde kein CBGS verwendet.
wurden auf der Grundlage des nuScenes-Datensatzes durchgeführt und bei allen Schulungen wurde kein CBGS verwendet.
Eingeschränktes Modell
Da der Autor das gesamte Modell auf einem Computer mit einer 3090-Grafikkarte durchgeführt hat, wird es als eingeschränktes Modell bezeichnet. Der Zielerkennungsteil des Modells verwendet BEVDet als Erkennungsbasislinie, das Bildcodierungs-Backbone ist ResNet50 und die Bildeingabe ist auf (3×256×704) eingestellt. Bildinformationen aus der Vergangenheit oder Zukunft werden im Modell nicht verwendet Die Batchgröße ist auf 8 eingestellt. Um die Spärlichkeit der Radardaten zu verringern, werden fünf Scans zur Verbesserung der Daten verwendet. Im Fusionsmodell werden keine zusätzlichen zeitlichen Informationen verwendet.
Verwenden Sie zur Zielerkennung die Scores von mAP, NDS und mAVE zur Auswertung; zur Verfolgung verwenden Sie AMOTA, AMOTP und IDS zur Auswertung. Objekterkennungsergebnisse

Tabelle 1 Erkennungsergebnisse im nuScenes-Validierungssatz
Tabelle 1 zeigt die Erkennungsleistung von CR3DT im Vergleich zur Basisarchitektur BEVDet (R50), die nur Kameras verwendet. Es ist offensichtlich, dass die Hinzufügung von Radar die Erkennungsleistung erheblich verbessert. Unter den Einschränkungen einer geringen Auflösung und eines geringen Zeitrahmens erreicht CR3DT erfolgreich eine Verbesserung des mAP um 5,3 % und eine NDS-Verbesserung von 7,7 % im Vergleich zum reinen Kamera-BEVDet. Aufgrund der begrenzten Rechenleistung konnte das Papier jedoch keine experimentellen Ergebnisse mit hoher Auflösung, Zusammenführung von Zeitinformationen usw. erzielen. Darüber hinaus ist in der letzten Spalte von Tabelle 1 auch die Inferenzzeit angegeben.
Tabelle 2 Ablationsexperiment des Erkennungsrahmens
In Tabelle 2 wird der Einfluss verschiedener Fusionsarchitekturen auf Erkennungsindikatoren verglichen. Die Fusionsmethoden sind hier in zwei Typen unterteilt: Der erste wird im Artikel erwähnt, der auf die z-dimensionale Voxelisierung und die anschließende 3D-Faltung verzichtet und die verbesserten Bildmerkmale und reinen RADAR-Daten direkt in Spalten aggregiert und so die bekannte Merkmalsgröße erhält ist ((64+18)×128×128); die andere besteht darin, die verbesserten Bildmerkmale und reinen RADAR-Daten in einen Würfel mit einer Größe von 0,8×0,8×0,8 m zu voxeln, um alternative Merkmale zu erhalten. Die Größe ist ((64+ 18) × 10 × 128 × 128), daher muss das BEV-Kompressormodul in Form einer 3D-Faltung verwendet werden. Wie aus Tabelle 2(a) ersichtlich ist, führt eine Erhöhung der Anzahl der BEV-Kompressoren zu einem Leistungsabfall, und es ist ersichtlich, dass die erste Lösung eine bessere Leistung erbringt. Aus Tabelle 2(b) ist auch ersichtlich, dass das Hinzufügen des Restblocks von Radardaten auch die Leistung verbessern kann, was auch bestätigt, was in der vorherigen Modellarchitektur erwähnt wurde. Das Hinzufügen von Restverbindungen zur Ausgabe der BEV-Feature-Codierungsschicht ist von Vorteil .
Tabelle 3 Tracking-Ergebnisse für den nuScenes-Validierungssatz basierend auf verschiedenen Konfigurationen von BEVDet und CR3DT.
Tabelle 3 zeigt die Tracking-Ergebnisse des verbesserten CC3DT++-Tracking-Modells für den nuScenes-Validierungssatz die Basislinie und die Leistung des CR3DT-Erkennungsmodells. Das CR3DT-Modell verbessert die Leistung von AMOTA um 14,9 % gegenüber dem Ausgangswert und verringert sie um 0,11 m bei AMOTP. Darüber hinaus ist zu erkennen, dass das IDS im Vergleich zum Ausgangswert um ca. 43 % reduziert ist.
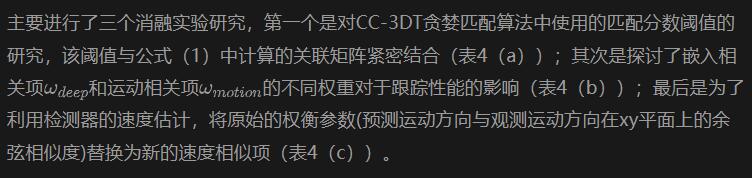
Tabelle 4 Tracking-Architektur-Ablationsexperimente, die am CR3DT-Erkennungs-Backbone durchgeführt wurden
Schlussfolgerung
Diese Arbeit schlägt ein effizientes Kamera-Radar-Fusionsmodell vor – CR3DT, speziell für die 3D-Objekterkennung und die Verfolgung mehrerer Objekte. Durch die Zusammenführung von Radardaten in die reine Kamera-BEVDet-Architektur und die Einführung der CC-3DT++-Tracking-Architektur hat CR3DT die Genauigkeit der 3D-Zielerkennung und -verfolgung erheblich verbessert, wobei mAP und AMOTA um 5,35 % bzw. 14,9 % gestiegen sind.
Die Lösung der Integration von Kamera und Millimeterwellenradar hat den Vorteil geringerer Kosten im Vergleich zu reinem LiDAR oder der Lösung der Integration von LiDAR und Kamera und kommt der aktuellen Entwicklung autonomer Fahrzeuge nahe. Darüber hinaus hat Millimeterwellenradar den Vorteil, dass es bei schlechtem Wetter robust ist und eine Vielzahl von Anwendungsszenarien bewältigen kann. Das derzeitige große Problem ist die Spärlichkeit von Millimeterwellenradar-Punktwolken und die Unfähigkeit, Höheninformationen zu erkennen. Ich glaube jedoch, dass die zukünftige Integration von Kameras und Millimeterwellenradarlösungen mit der kontinuierlichen Weiterentwicklung des 4D-Millimeterwellenradars ein höheres Niveau erreichen und noch bessere Ergebnisse erzielen wird!
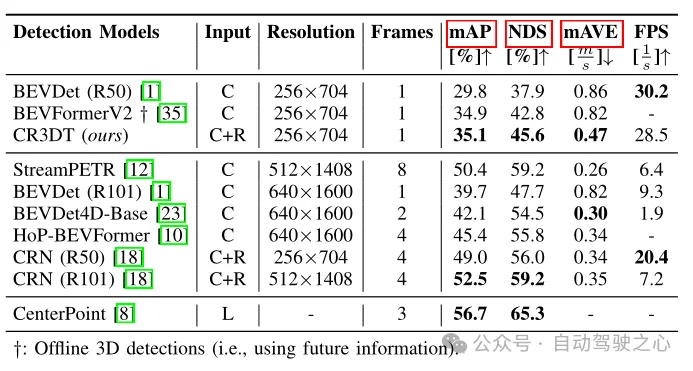
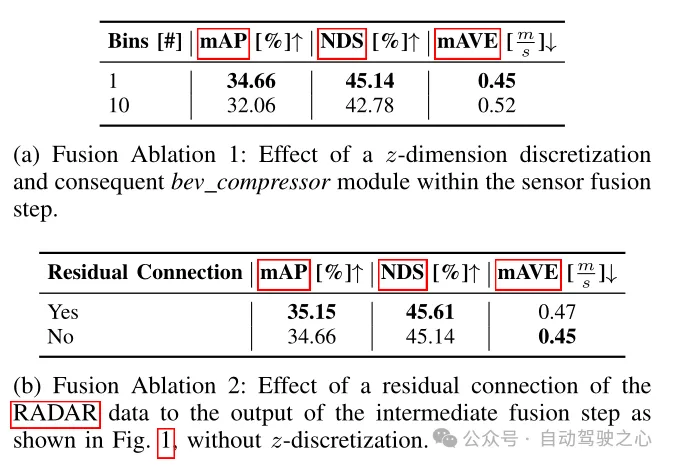
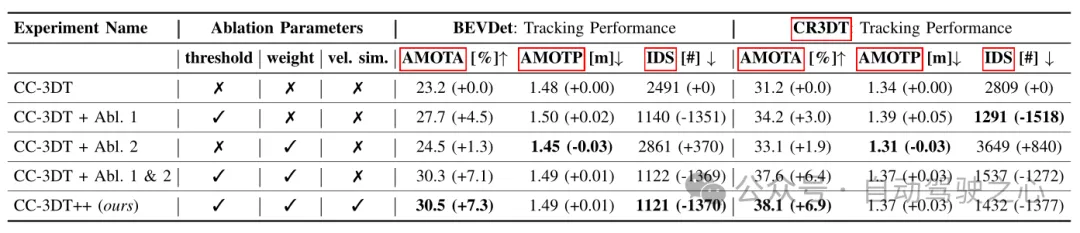 Tabelle 3 Tracking-Ergebnisse für den nuScenes-Validierungssatz basierend auf verschiedenen Konfigurationen von BEVDet und CR3DT.
Tabelle 3 Tracking-Ergebnisse für den nuScenes-Validierungssatz basierend auf verschiedenen Konfigurationen von BEVDet und CR3DT. 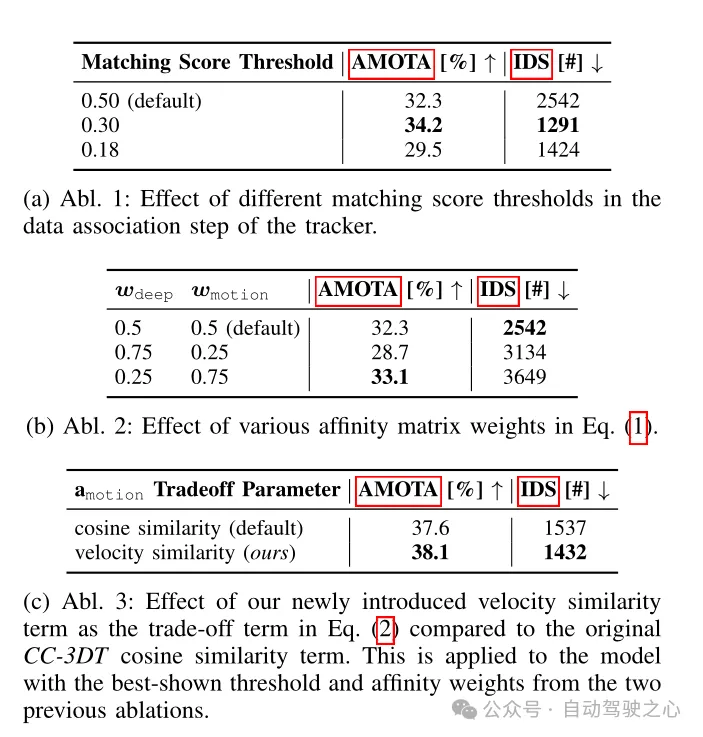
Das obige ist der detaillierte Inhalt vonJenseits von BEVFormer! CR3DT: RV-Fusion hilft bei der 3D-Erkennung und -Verfolgung neuer SOTA (ETH). Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1377
1377
 52
52

 4K-HD-Bilder ganz einfach verstehen! Dieses große multimodale Modell analysiert automatisch den Inhalt von Webplakaten und ist damit für Mitarbeiter sehr praktisch.
Apr 23, 2024 am 08:04 AM
4K-HD-Bilder ganz einfach verstehen! Dieses große multimodale Modell analysiert automatisch den Inhalt von Webplakaten und ist damit für Mitarbeiter sehr praktisch.
Apr 23, 2024 am 08:04 AM
Ein großes Modell, das den Inhalt von PDFs, Webseiten, Postern und Excel-Diagrammen automatisch analysieren kann, ist für Mitarbeiter nicht besonders praktisch. Das von Shanghai AILab, der Chinesischen Universität Hongkong und anderen Forschungseinrichtungen vorgeschlagene Modell InternLM-XComposer2-4KHD (abgekürzt IXC2-4KHD) macht dies Wirklichkeit. Im Vergleich zu anderen multimodalen großen Modellen, deren Auflösungsgrenze nicht mehr als 1500 x 1500 beträgt, erhöht diese Arbeit das maximale Eingabebild multimodaler großer Modelle auf eine Auflösung von über 4K (3840 x 1600) und unterstützt jedes Seitenverhältnis und 336 Pixel bis 4K Dynamische Auflösungsänderungen. Drei Tage nach seiner Veröffentlichung stand das Modell an der Spitze der Beliebtheitsliste der visuellen Frage-Antwort-Modelle von HuggingFace. Einfach zu bedienen
 CVPR 2024 |. LiDAR-Diffusionsmodell für die fotorealistische Szenengenerierung
Apr 24, 2024 pm 04:28 PM
CVPR 2024 |. LiDAR-Diffusionsmodell für die fotorealistische Szenengenerierung
Apr 24, 2024 pm 04:28 PM
Originaltitel: TowardsRealisticSceneGenerationwithLiDARDiffusionModels Papier-Link: https://hancyran.github.io/assets/paper/lidar_diffusion.pdf Code-Link: https://lidar-diffusion.github.io Autorenzugehörigkeit: CMU Toyota Research Institute University of Southern California Paper Ideen: Diffusionsmodelle (DMs) zeichnen sich durch fotorealistische Bildsynthese aus, ihre Anpassung an die Lidar-Szenengenerierung stellt jedoch erhebliche Herausforderungen dar. Dies liegt hauptsächlich daran, dass DMs, die im Punktraum arbeiten, Schwierigkeiten haben
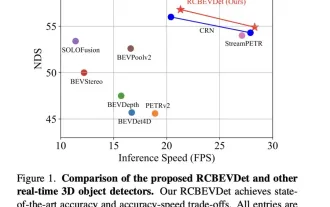 Die Leistung der RV-Fusion ist erstaunlich! RCBEVDet: Radar hat auch Frühling, das neueste SOTA!
Apr 02, 2024 am 11:49 AM
Die Leistung der RV-Fusion ist erstaunlich! RCBEVDet: Radar hat auch Frühling, das neueste SOTA!
Apr 02, 2024 am 11:49 AM
Wie oben geschrieben und nach persönlichem Verständnis des Autors liegt der Schwerpunkt dieses Diskussionspapiers auf der Anwendung der 3D-Zielerkennungstechnologie im Prozess des autonomen Fahrens. Obwohl die Entwicklung der Umgebungskameratechnologie hochauflösende semantische Informationen für die 3D-Objekterkennung liefert, ist diese Methode durch Probleme wie die Unfähigkeit, Tiefeninformationen genau zu erfassen, und schlechte Leistung bei schlechtem Wetter oder schlechten Lichtverhältnissen eingeschränkt. Als Reaktion auf dieses Problem wurde in der Diskussion eine neue Multimode-3D-Zielerkennungsmethode RCBEVDet vorgeschlagen, die Rundumsichtkameras und kostengünstige Millimeterwellenradarsensoren kombiniert. Diese Methode bietet umfangreichere semantische Informationen und eine Lösung für Probleme wie schlechte Leistung bei schlechtem Wetter oder schlechten Lichtverhältnissen, indem sie Informationen von mehreren Sensoren umfassend nutzt. Als Reaktion auf dieses Problem wurde in der Diskussion eine Methode vorgeschlagen, die Surround-View-Kameras kombiniert
 Neue Ideen für die LiDAR-Simulation |. LidarDM: Hilft bei der Generierung einer 4D-Welt, Simulationskiller~
Apr 12, 2024 am 11:46 AM
Neue Ideen für die LiDAR-Simulation |. LidarDM: Hilft bei der Generierung einer 4D-Welt, Simulationskiller~
Apr 12, 2024 am 11:46 AM
Originaltitel: LidarDM: GenerativeLiDARSimulationinaGeneratedWorld Papier-Link: https://arxiv.org/pdf/2404.02903.pdf Code-Link: https://github.com/vzyrianov/lidardm Autorenzugehörigkeit: University of Illinois, Massachusetts Institute of Technology Papier-Idee: Einführung in diesen Artikel LidarDM, ein neuartiges Lidar-Generierungsmodell, mit dem realistische, Layout-bewusste, physikalisch glaubwürdige und zeitlich kohärente Lidar-Videos erstellt werden können. LidarDM verfügt über zwei beispiellose Funktionen in der generativen Lidar-Modellierung: (1)
 Jenseits von BEVFormer! CR3DT: RV-Fusion hilft bei der 3D-Erkennung und -Verfolgung neuer SOTA (ETH)
Apr 24, 2024 pm 06:07 PM
Jenseits von BEVFormer! CR3DT: RV-Fusion hilft bei der 3D-Erkennung und -Verfolgung neuer SOTA (ETH)
Apr 24, 2024 pm 06:07 PM
Oben geschrieben und nach persönlichem Verständnis des Autors. In diesem Artikel wird eine Kamera-Millimeterwellen-Radar-Fusionsmethode (CR3DT) für die 3D-Zielerkennung und die Verfolgung mehrerer Ziele vorgestellt. Die Lidar-basierte Methode hat in diesem Bereich einen hohen Standard gesetzt, ihre hohe Rechenleistung und ihre hohen Kosten haben jedoch die Entwicklung dieser Lösung im Bereich des autonomen Fahrens eingeschränkt Kosten Es ist relativ niedrig und hat die Aufmerksamkeit vieler Wissenschaftler auf sich gezogen, aber aufgrund seiner schlechten Ergebnisse. Daher wird die Fusion von Kameras und Millimeterwellenradar zu einer vielversprechenden Lösung. Unter dem bestehenden Kamera-Framework BEVDet führt der Autor die räumlichen und Geschwindigkeitsinformationen des Millimeterwellenradars zusammen und kombiniert sie mit dem CC-3DT++-Tracking-Kopf, um die Genauigkeit der 3D-Zielerkennung und -verfolgung deutlich zu verbessern.
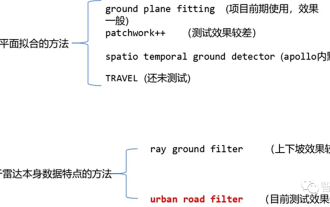 „Eingehende Analyse': Erkundung des LiDAR-Punktwolken-Segmentierungsalgorithmus beim autonomen Fahren
Apr 23, 2023 pm 04:46 PM
„Eingehende Analyse': Erkundung des LiDAR-Punktwolken-Segmentierungsalgorithmus beim autonomen Fahren
Apr 23, 2023 pm 04:46 PM
Derzeit gibt es zwei gängige Algorithmen zur Segmentierung von Laserpunktwolken: Methoden, die auf der Ebenenanpassung basieren, und Methoden, die auf den Eigenschaften von Laserpunktwolkendaten basieren. Die Details lauten wie folgt: Punktwolken-Bodensegmentierungsalgorithmus 01 Methode basierend auf der Ebenenanpassung – Idee des GroundPlaneFitting-Algorithmus: Eine einfache Verarbeitungsmethode besteht darin, den Raum in mehrere Unterebenen entlang der x-Richtung (der Richtung der Vorderseite des Autos) zu unterteilen. , und dann den Ground Plane Fitting Algorithm (GPF) verwenden, ergibt eine Bodensegmentierungsmethode, die steile Hänge bewältigen kann. Diese Methode dient dazu, eine globale Ebene in eine einzelne Punktwolke einzupassen. Sie funktioniert besser, wenn die Anzahl der Punktwolken spärlich ist, kann es leicht zu Fehlerkennungen und falschen Erkennungen kommen, z. B. bei 16 Linien Lidar. Algorithmus-Pseudocode: Der Pseudocode-Algorithmusprozess ist das Endergebnis der Segmentierung für eine gegebene Punktwolke P.
 LiDAR-Sensortechnologielösung unter extremen Wetterbedingungen
May 10, 2023 pm 04:07 PM
LiDAR-Sensortechnologielösung unter extremen Wetterbedingungen
May 10, 2023 pm 04:07 PM
01Zusammenfassung Selbstfahrende Autos sind auf verschiedene Sensoren angewiesen, um Informationen über die Umgebung zu sammeln. Da das Verhalten des Fahrzeugs umweltbewusst geplant wird, ist seine Zuverlässigkeit aus Sicherheitsgründen von entscheidender Bedeutung. Aktive Lidar-Sensoren sind in der Lage, genaue 3D-Darstellungen von Szenen zu erstellen, was sie zu einer wertvollen Ergänzung für das Umweltbewusstsein autonomer Fahrzeuge macht. Die Leistung von LiDAR ändert sich bei widrigen Wetterbedingungen wie Nebel, Schnee oder Regen aufgrund von Lichtstreuung und Okklusion. Diese Einschränkung hat in letzter Zeit umfangreiche Forschungen zu Methoden zur Abmilderung der Verschlechterung der Wahrnehmungsleistung angeregt. In diesem Artikel werden verschiedene Aspekte der LiDAR-basierten Umweltsensorik zur Bewältigung widriger Wetterbedingungen gesammelt, analysiert und diskutiert. und diskutiert Themen wie die Verfügbarkeit geeigneter Daten, die Verarbeitung und Entrauschung von Rohpunktwolken, robuste Wahrnehmungsalgorithmen und Sensorfusion zur Linderung
 Einführung in die in Java implementierte Radarsignalverarbeitungstechnologie
Jun 18, 2023 am 10:15 AM
Einführung in die in Java implementierte Radarsignalverarbeitungstechnologie
Jun 18, 2023 am 10:15 AM
Einleitung: Mit der kontinuierlichen Weiterentwicklung moderner Wissenschaft und Technologie wird die Radarsignalverarbeitungstechnologie immer häufiger eingesetzt. Java ist derzeit eine der beliebtesten Programmiersprachen und wird häufig bei der Implementierung von Radarsignalverarbeitungsalgorithmen verwendet. In diesem Artikel wird die in Java implementierte Radarsignalverarbeitungstechnologie vorgestellt. 1. Einführung in die Radarsignalverarbeitungstechnologie Die Radarsignalverarbeitungstechnologie kann als Kern und Seele der Entwicklung von Radarsystemen bezeichnet werden und ist die Schlüsseltechnologie zur Verwirklichung der Automatisierung und Digitalisierung von Radarsystemen. Die Radarsignalverarbeitungstechnologie umfasst Wellenformverarbeitung, Filterung, Impulskomprimierung und adaptive Strahlformung.
