
 Technologie-Peripheriegeräte
KI
OmniDrive: Ein Framework zur Ausrichtung großer Modelle auf 3D-Fahraufgaben
Technologie-Peripheriegeräte
KI
OmniDrive: Ein Framework zur Ausrichtung großer Modelle auf 3D-Fahraufgaben
OmniDrive: Ein Framework zur Ausrichtung großer Modelle auf 3D-Fahraufgaben

Beginnen Sie mit einer neuartigen 3D-MLLM-Architektur, die spärliche Abfragen verwendet, um visuelle Darstellungen in 3D zu heben und zu komprimieren, die dann in das LLM eingespeist werden.
Titel: OmniDrive: A Holistic LLM-Agent Framework for Autonomous Driving with 3D Perception Reasoning and Planning
Autorenzugehörigkeit: Beijing Institute of Technology, NVIDIA, Huazhong University of Science and Technology
Open-Source-Adresse: GitHub – NVlabs/OmniDrive
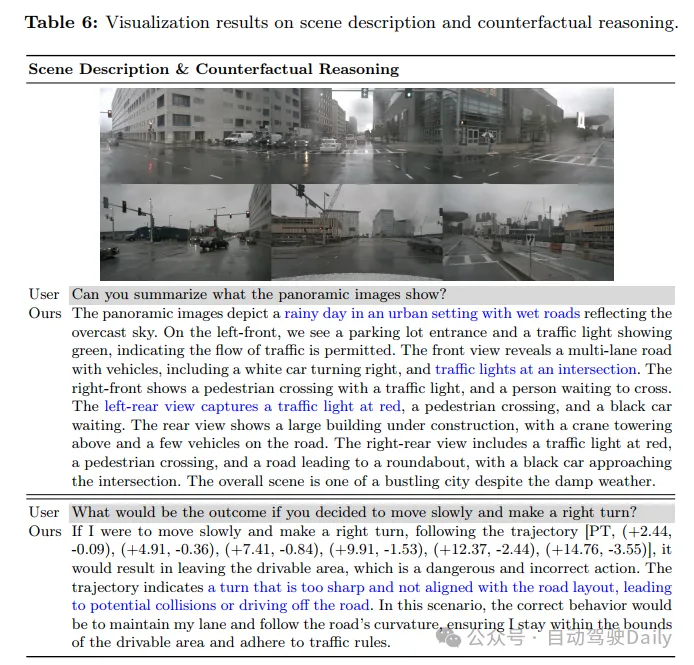
Multimodalität Die Entwicklung großer Sprachmodelle (MLLMs) hat zu einem wachsenden Interesse am LLM-basierten autonomen Fahren geführt und nutzt deren leistungsstarke Inferenzfähigkeiten. Die Nutzung der leistungsstarken Argumentationsfähigkeiten von MLLMs zur Verbesserung des Planungsverhaltens ist eine Herausforderung, da sie über das 2D-Argument hinaus ein umfassendes 3D-Situationsbewusstsein erfordern. Um dieser Herausforderung zu begegnen, schlägt diese Arbeit OmniDrive vor, ein umfassendes Framework für eine robuste Ausrichtung zwischen Agentenmodellen und 3D-Fahraufgaben. Das Framework beginnt mit einer neuartigen 3D+MLLM-Architektur, die spärliche Abfragen verwendet, um Beobachtungsdarstellungen in 3D zu heben und zu komprimieren, die dann in das LLM eingespeist werden. Diese abfragebasierte Darstellung ermöglicht es uns, dynamische Objekte und statische Kartenelemente (z. B. Verkehrsstraßen) gemeinsam zu kodieren und so ein prägnantes Weltmodell für die Ausrichtung von Wahrnehmung und Aktion in 3D bereitzustellen. Wir schlagen außerdem einen neuen Benchmark vor, der umfassende Aufgaben zur visuellen Beantwortung von Fragen (VQA) umfasst, einschließlich Szenenbeschreibung, Verkehrsregeln, 3D-Erdung, kontrafaktisches Denken, Entscheidungsfindung und Planung. Umfangreiche Untersuchungen belegen die überlegenen Argumentations- und Planungsfähigkeiten von OmniDrive in komplexen 3D-Szenen.
Netzwerkstruktur


Experimentelle Ergebnisse




Das obige ist der detaillierte Inhalt vonOmniDrive: Ein Framework zur Ausrichtung großer Modelle auf 3D-Fahraufgaben. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

AI Hentai Generator
Erstellen Sie kostenlos Ai Hentai.

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1376
1376
 52
52

 Welche Bibliotheken werden für die Operationen der schwimmenden Punktzahl in Go verwendet?
Apr 02, 2025 pm 02:06 PM
Welche Bibliotheken werden für die Operationen der schwimmenden Punktzahl in Go verwendet?
Apr 02, 2025 pm 02:06 PM
In der Bibliothek, die für den Betrieb der Schwimmpunktnummer in der GO-Sprache verwendet wird, wird die Genauigkeit sichergestellt, wie die Genauigkeit ...
 Gitee Pages statische Website -Bereitstellung fehlgeschlagen: Wie können Sie einzelne Dateien 404 Fehler beheben und beheben?
Apr 04, 2025 pm 11:54 PM
Gitee Pages statische Website -Bereitstellung fehlgeschlagen: Wie können Sie einzelne Dateien 404 Fehler beheben und beheben?
Apr 04, 2025 pm 11:54 PM
GitePages statische Website -Bereitstellung fehlgeschlagen: 404 Fehlerbehebung und Auflösung bei der Verwendung von Gitee ...
 So führen Sie das H5 -Projekt aus
Apr 06, 2025 pm 12:21 PM
So führen Sie das H5 -Projekt aus
Apr 06, 2025 pm 12:21 PM
Ausführen des H5 -Projekts erfordert die folgenden Schritte: Installation der erforderlichen Tools wie Webserver, Node.js, Entwicklungstools usw. Erstellen Sie eine Entwicklungsumgebung, erstellen Sie Projektordner, initialisieren Sie Projekte und schreiben Sie Code. Starten Sie den Entwicklungsserver und führen Sie den Befehl mit der Befehlszeile aus. Vorschau des Projekts in Ihrem Browser und geben Sie die Entwicklungsserver -URL ein. Veröffentlichen Sie Projekte, optimieren Sie Code, stellen Sie Projekte bereit und richten Sie die Webserverkonfiguration ein.
 Welche Bibliotheken in GO werden von großen Unternehmen entwickelt oder von bekannten Open-Source-Projekten bereitgestellt?
Apr 02, 2025 pm 04:12 PM
Welche Bibliotheken in GO werden von großen Unternehmen entwickelt oder von bekannten Open-Source-Projekten bereitgestellt?
Apr 02, 2025 pm 04:12 PM
Welche Bibliotheken in GO werden von großen Unternehmen oder bekannten Open-Source-Projekten entwickelt? Bei der Programmierung in Go begegnen Entwickler häufig auf einige häufige Bedürfnisse, ...
 Wie gibt ich die mit dem Modell in Beego Orm zugeordnete Datenbank an?
Apr 02, 2025 pm 03:54 PM
Wie gibt ich die mit dem Modell in Beego Orm zugeordnete Datenbank an?
Apr 02, 2025 pm 03:54 PM
Wie kann man im Beegoorm -Framework die mit dem Modell zugeordnete Datenbank angeben? In vielen BeEGO -Projekten müssen mehrere Datenbanken gleichzeitig betrieben werden. Bei Verwendung von BeEGO ...
 Wie löste ich das Problem des Typs des user_id -Typs bei der Verwendung von Redis -Stream, um Nachrichtenwarteschlangen in GO -Sprache zu implementieren?
Apr 02, 2025 pm 04:54 PM
Wie löste ich das Problem des Typs des user_id -Typs bei der Verwendung von Redis -Stream, um Nachrichtenwarteschlangen in GO -Sprache zu implementieren?
Apr 02, 2025 pm 04:54 PM
Das Problem der Verwendung von RETISTREAM zur Implementierung von Nachrichtenwarteschlangen in der GO -Sprache besteht darin, die Go -Sprache und Redis zu verwenden ...
 Bedarf die Produktion von H5 -Seiten eine kontinuierliche Wartung?
Apr 05, 2025 pm 11:27 PM
Bedarf die Produktion von H5 -Seiten eine kontinuierliche Wartung?
Apr 05, 2025 pm 11:27 PM
Die H5 -Seite muss aufgrund von Faktoren wie Code -Schwachstellen, Browserkompatibilität, Leistungsoptimierung, Sicherheitsaktualisierungen und Verbesserungen der Benutzererfahrung kontinuierlich aufrechterhalten werden. Zu den effektiven Wartungsmethoden gehören das Erstellen eines vollständigen Testsystems, die Verwendung von Versionstools für Versionskontrolle, die regelmäßige Überwachung der Seitenleistung, das Sammeln von Benutzern und die Formulierung von Wartungsplänen.
 Wie erhalten Sie die Daten der Versandregion der Überseeversion? Was stehen einige vorgefertigte Ressourcen zur Verfügung?
Apr 01, 2025 am 08:15 AM
Wie erhalten Sie die Daten der Versandregion der Überseeversion? Was stehen einige vorgefertigte Ressourcen zur Verfügung?
Apr 01, 2025 am 08:15 AM
Frage Beschreibung: Wie erhalten Sie die Daten der Versandregion der Überseeversion? Gibt es bereitgestellte Ressourcen? Werden Sie im grenzüberschreitenden E-Commerce oder im globalisierten Geschäft genau ...
