

Python聚类算法之DBSACN实例分析

本文实例讲述了Python聚类算法之DBSACN。分享给大家供大家参考,具体如下:
DBSCAN:是一种简单的,基于密度的聚类算法。本次实现中,DBSCAN使用了基于中心的方法。在基于中心的方法中,每个数据点的密度通过对以该点为中心以边长为2*EPs的网格(邻域)内的其他数据点的个数来度量。根据数据点的密度分为三类点:
核心点:该点在邻域内的密度超过给定的阀值MinPs。
边界点:该点不是核心点,但是其邻域内包含至少一个核心点。
噪音点:不是核心点,也不是边界点。
有了以上对数据点的划分,聚合可以这样进行:各个核心点与其邻域内的所有核心点放在同一个簇中,把边界点跟其邻域内的某个核心点放在同一个簇中。
# scoding=utf-8
import pylab as pl
from collections import defaultdict,Counter
points = [[int(eachpoint.split("#")[0]), int(eachpoint.split("#")[1])] for eachpoint in open("points","r")]
# 计算每个数据点相邻的数据点,邻域定义为以该点为中心以边长为2*EPs的网格
Eps = 10
surroundPoints = defaultdict(list)
for idx1,point1 in enumerate(points):
for idx2,point2 in enumerate(points):
if (idx1 < idx2):
if(abs(point1[0]-point2[0])<=Eps and abs(point1[1]-point2[1])<=Eps):
surroundPoints[idx1].append(idx2)
surroundPoints[idx2].append(idx1)
# 定义邻域内相邻的数据点的个数大于4的为核心点
MinPts = 5
corePointIdx = [pointIdx for pointIdx,surPointIdxs in surroundPoints.iteritems() if len(surPointIdxs)>=MinPts]
# 邻域内包含某个核心点的非核心点,定义为边界点
borderPointIdx = []
for pointIdx,surPointIdxs in surroundPoints.iteritems():
if (pointIdx not in corePointIdx):
for onesurPointIdx in surPointIdxs:
if onesurPointIdx in corePointIdx:
borderPointIdx.append(pointIdx)
break
# 噪音点既不是边界点也不是核心点
noisePointIdx = [pointIdx for pointIdx in range(len(points)) if pointIdx not in corePointIdx and pointIdx not in borderPointIdx]
corePoint = [points[pointIdx] for pointIdx in corePointIdx]
borderPoint = [points[pointIdx] for pointIdx in borderPointIdx]
noisePoint = [points[pointIdx] for pointIdx in noisePointIdx]
# pl.plot([eachpoint[0] for eachpoint in corePoint], [eachpoint[1] for eachpoint in corePoint], 'or')
# pl.plot([eachpoint[0] for eachpoint in borderPoint], [eachpoint[1] for eachpoint in borderPoint], 'oy')
# pl.plot([eachpoint[0] for eachpoint in noisePoint], [eachpoint[1] for eachpoint in noisePoint], 'ok')
groups = [idx for idx in range(len(points))]
# 各个核心点与其邻域内的所有核心点放在同一个簇中
for pointidx,surroundIdxs in surroundPoints.iteritems():
for oneSurroundIdx in surroundIdxs:
if (pointidx in corePointIdx and oneSurroundIdx in corePointIdx and pointidx < oneSurroundIdx):
for idx in range(len(groups)):
if groups[idx] == groups[oneSurroundIdx]:
groups[idx] = groups[pointidx]
# 边界点跟其邻域内的某个核心点放在同一个簇中
for pointidx,surroundIdxs in surroundPoints.iteritems():
for oneSurroundIdx in surroundIdxs:
if (pointidx in borderPointIdx and oneSurroundIdx in corePointIdx):
groups[pointidx] = groups[oneSurroundIdx]
break
# 取簇规模最大的5个簇
wantGroupNum = 3
finalGroup = Counter(groups).most_common(3)
finalGroup = [onecount[0] for onecount in finalGroup]
group1 = [points[idx] for idx in xrange(len(points)) if groups[idx]==finalGroup[0]]
group2 = [points[idx] for idx in xrange(len(points)) if groups[idx]==finalGroup[1]]
group3 = [points[idx] for idx in xrange(len(points)) if groups[idx]==finalGroup[2]]
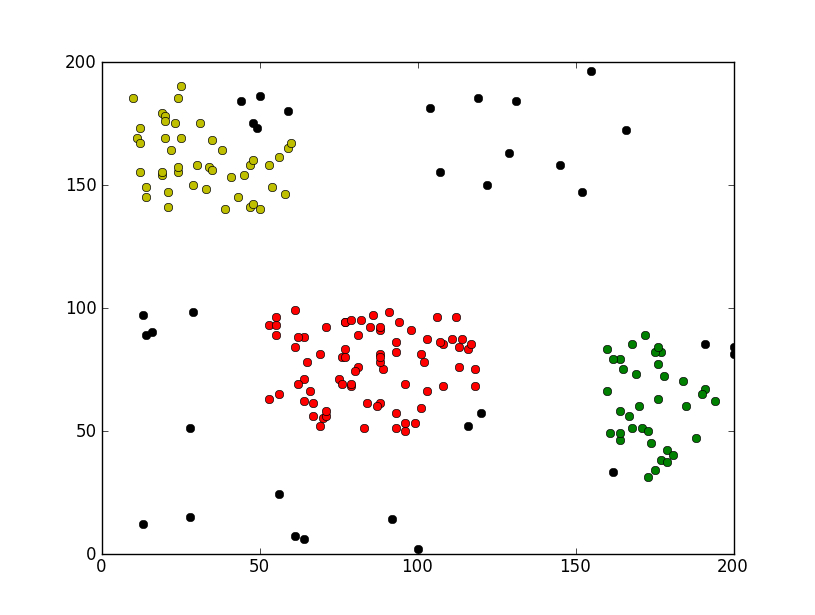
pl.plot([eachpoint[0] for eachpoint in group1], [eachpoint[1] for eachpoint in group1], 'or')
pl.plot([eachpoint[0] for eachpoint in group2], [eachpoint[1] for eachpoint in group2], 'oy')
pl.plot([eachpoint[0] for eachpoint in group3], [eachpoint[1] for eachpoint in group3], 'og')
# 打印噪音点,黑色
pl.plot([eachpoint[0] for eachpoint in noisePoint], [eachpoint[1] for eachpoint in noisePoint], 'ok')
pl.show()
运行效果截图如下:
希望本文所述对大家Python程序设计有所帮助。

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1374
1374
 52
52

 What is the reason why PS keeps showing loading?
Apr 06, 2025 pm 06:39 PM
What is the reason why PS keeps showing loading?
Apr 06, 2025 pm 06:39 PM
PS "Loading" problems are caused by resource access or processing problems: hard disk reading speed is slow or bad: Use CrystalDiskInfo to check the hard disk health and replace the problematic hard disk. Insufficient memory: Upgrade memory to meet PS's needs for high-resolution images and complex layer processing. Graphics card drivers are outdated or corrupted: Update the drivers to optimize communication between the PS and the graphics card. File paths are too long or file names have special characters: use short paths and avoid special characters. PS's own problem: Reinstall or repair the PS installer.
 How to solve the problem of loading when PS is started?
Apr 06, 2025 pm 06:36 PM
How to solve the problem of loading when PS is started?
Apr 06, 2025 pm 06:36 PM
A PS stuck on "Loading" when booting can be caused by various reasons: Disable corrupt or conflicting plugins. Delete or rename a corrupted configuration file. Close unnecessary programs or upgrade memory to avoid insufficient memory. Upgrade to a solid-state drive to speed up hard drive reading. Reinstalling PS to repair corrupt system files or installation package issues. View error information during the startup process of error log analysis.
 How to speed up the loading speed of PS?
Apr 06, 2025 pm 06:27 PM
How to speed up the loading speed of PS?
Apr 06, 2025 pm 06:27 PM
Solving the problem of slow Photoshop startup requires a multi-pronged approach, including: upgrading hardware (memory, solid-state drive, CPU); uninstalling outdated or incompatible plug-ins; cleaning up system garbage and excessive background programs regularly; closing irrelevant programs with caution; avoiding opening a large number of files during startup.
 Is slow PS loading related to computer configuration?
Apr 06, 2025 pm 06:24 PM
Is slow PS loading related to computer configuration?
Apr 06, 2025 pm 06:24 PM
The reason for slow PS loading is the combined impact of hardware (CPU, memory, hard disk, graphics card) and software (system, background program). Solutions include: upgrading hardware (especially replacing solid-state drives), optimizing software (cleaning up system garbage, updating drivers, checking PS settings), and processing PS files. Regular computer maintenance can also help improve PS running speed.
 How to solve the problem of loading when the PS opens the file?
Apr 06, 2025 pm 06:33 PM
How to solve the problem of loading when the PS opens the file?
Apr 06, 2025 pm 06:33 PM
"Loading" stuttering occurs when opening a file on PS. The reasons may include: too large or corrupted file, insufficient memory, slow hard disk speed, graphics card driver problems, PS version or plug-in conflicts. The solutions are: check file size and integrity, increase memory, upgrade hard disk, update graphics card driver, uninstall or disable suspicious plug-ins, and reinstall PS. This problem can be effectively solved by gradually checking and making good use of PS performance settings and developing good file management habits.
 How to solve the problem of loading when PS is always showing that it is loading?
Apr 06, 2025 pm 06:30 PM
How to solve the problem of loading when PS is always showing that it is loading?
Apr 06, 2025 pm 06:30 PM
PS card is "Loading"? Solutions include: checking the computer configuration (memory, hard disk, processor), cleaning hard disk fragmentation, updating the graphics card driver, adjusting PS settings, reinstalling PS, and developing good programming habits.
 How does PS feathering control the softness of the transition?
Apr 06, 2025 pm 07:33 PM
How does PS feathering control the softness of the transition?
Apr 06, 2025 pm 07:33 PM
The key to feather control is to understand its gradual nature. PS itself does not provide the option to directly control the gradient curve, but you can flexibly adjust the radius and gradient softness by multiple feathering, matching masks, and fine selections to achieve a natural transition effect.
 How to use mysql after installation
Apr 08, 2025 am 11:48 AM
How to use mysql after installation
Apr 08, 2025 am 11:48 AM
The article introduces the operation of MySQL database. First, you need to install a MySQL client, such as MySQLWorkbench or command line client. 1. Use the mysql-uroot-p command to connect to the server and log in with the root account password; 2. Use CREATEDATABASE to create a database, and USE select a database; 3. Use CREATETABLE to create a table, define fields and data types; 4. Use INSERTINTO to insert data, query data, update data by UPDATE, and delete data by DELETE. Only by mastering these steps, learning to deal with common problems and optimizing database performance can you use MySQL efficiently.
